
Using Unmanned Aerial Vehicle Data to Improve Satellite Inversion: A Study on Soil Salinity

Abstract
:1. Introduction
2. Materials and Methods
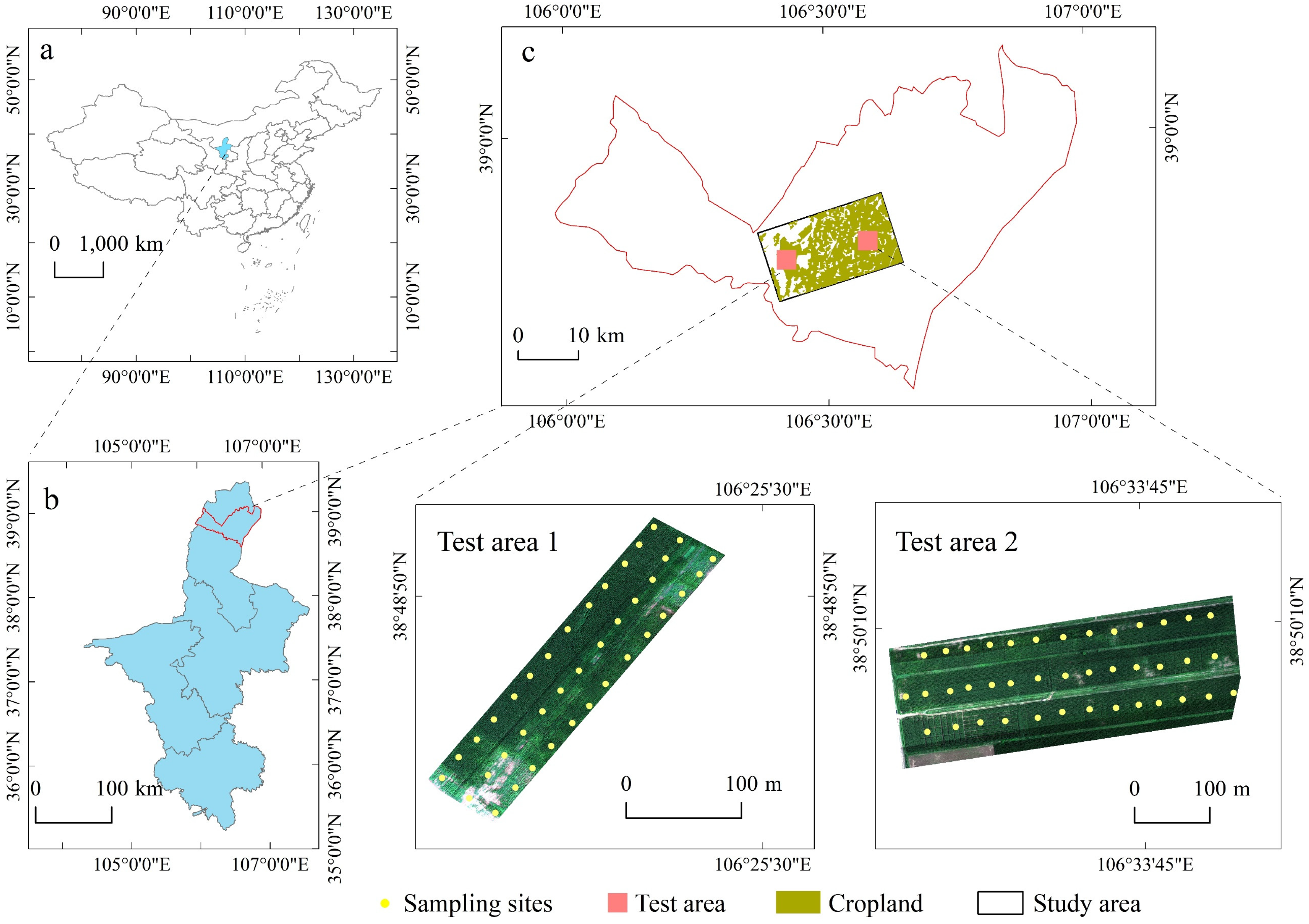
2.1. Study Area
2.2. Data Processing
2.2.1. Soil Sample Collection and Preprocessing
2.2.2. Satellite Data Processing
2.2.3. UAV Data Processing
2.3. Methods
2.3.1. Upscaling Conversion Methods and Effects Evaluation
2.3.2. Calculation of Spectral Indices
2.3.3. Features Selection
2.3.4. Construction and Evaluation of the Soil Salinity Monitoring Model
2.3.5. Numerical Regression Method
3. Results
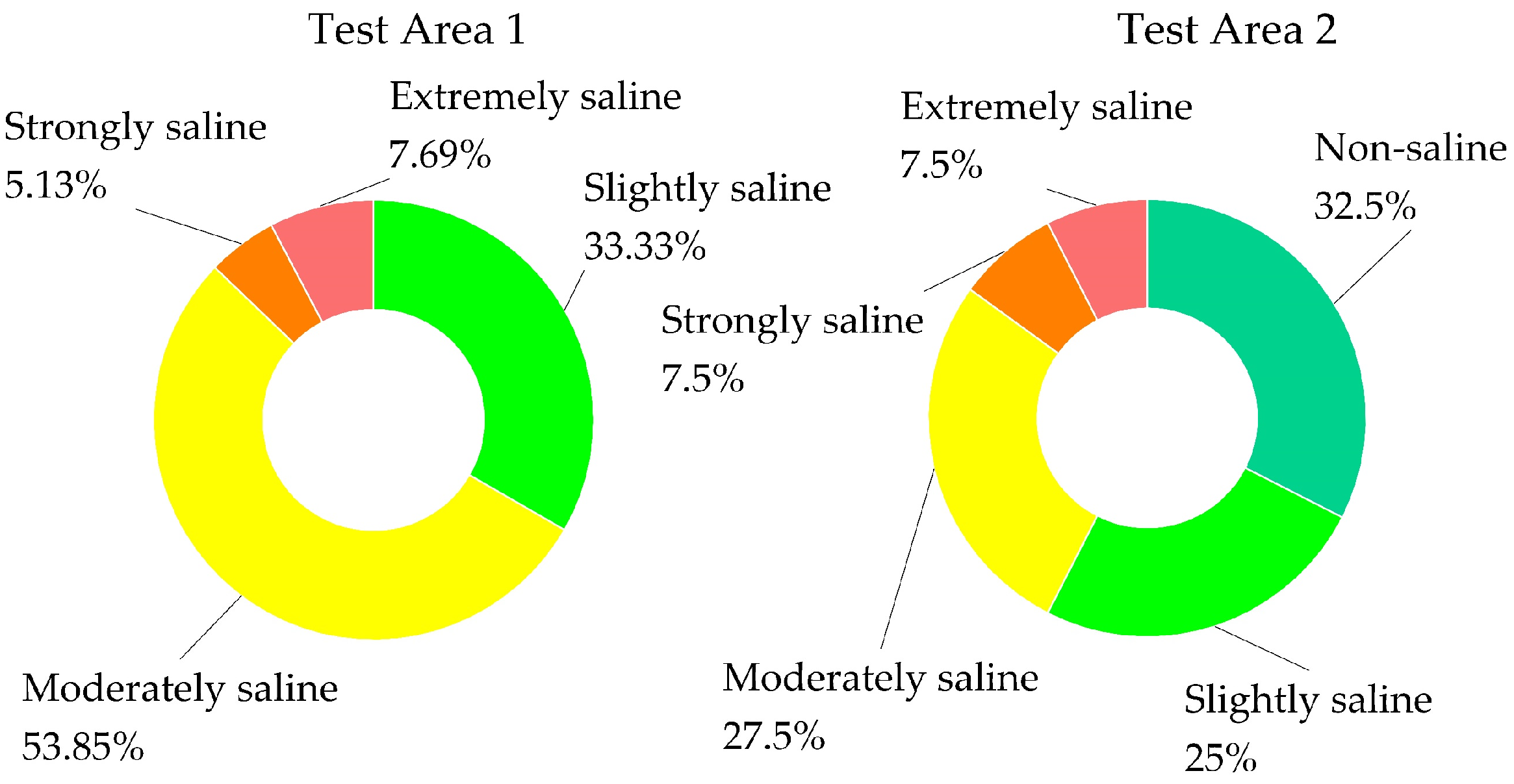
3.1. Statistical Characterization of Soil Salinity
3.2. Spectral Characteristics of Images after Upscaling by Different Methods
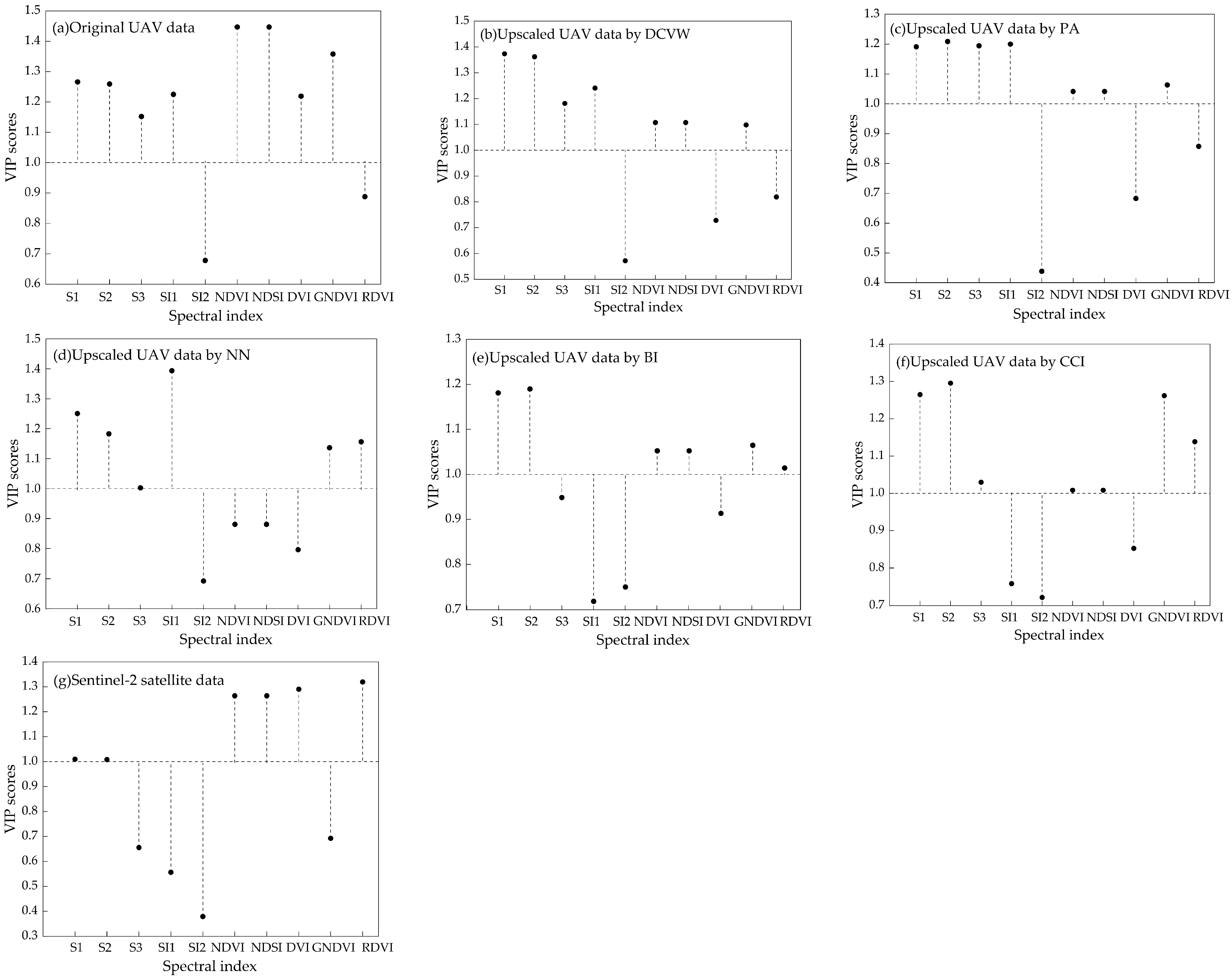
3.3. Optimal Factor Selection for Soil Salinity Inversion
3.4. Model Establishment
3.5. Calibration and Validation of Satellite Inversion Model for Soil Salinity
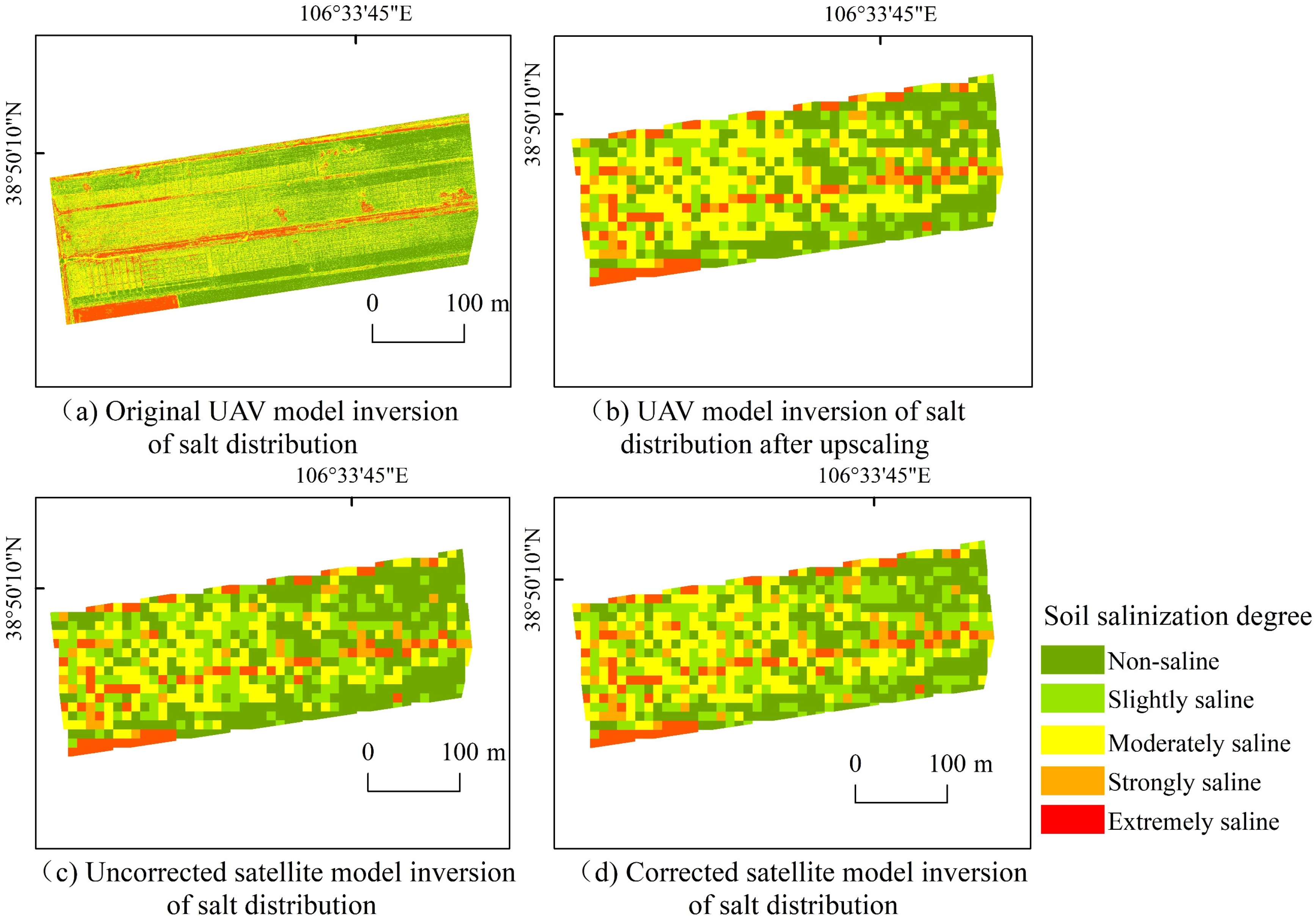
3.6. Model Application
4. Discussion
4.1. Enhancing Soil Salinity Monitoring Accuracy: Integrating UAV with Satellite Data
4.2. Improving the Accuracy of Soil Salinization Assessments by Selecting Appropriate Upscaling Methods
4.3. Spectral Matching between UAV Hyperspectral and Satellite Multispectral Data
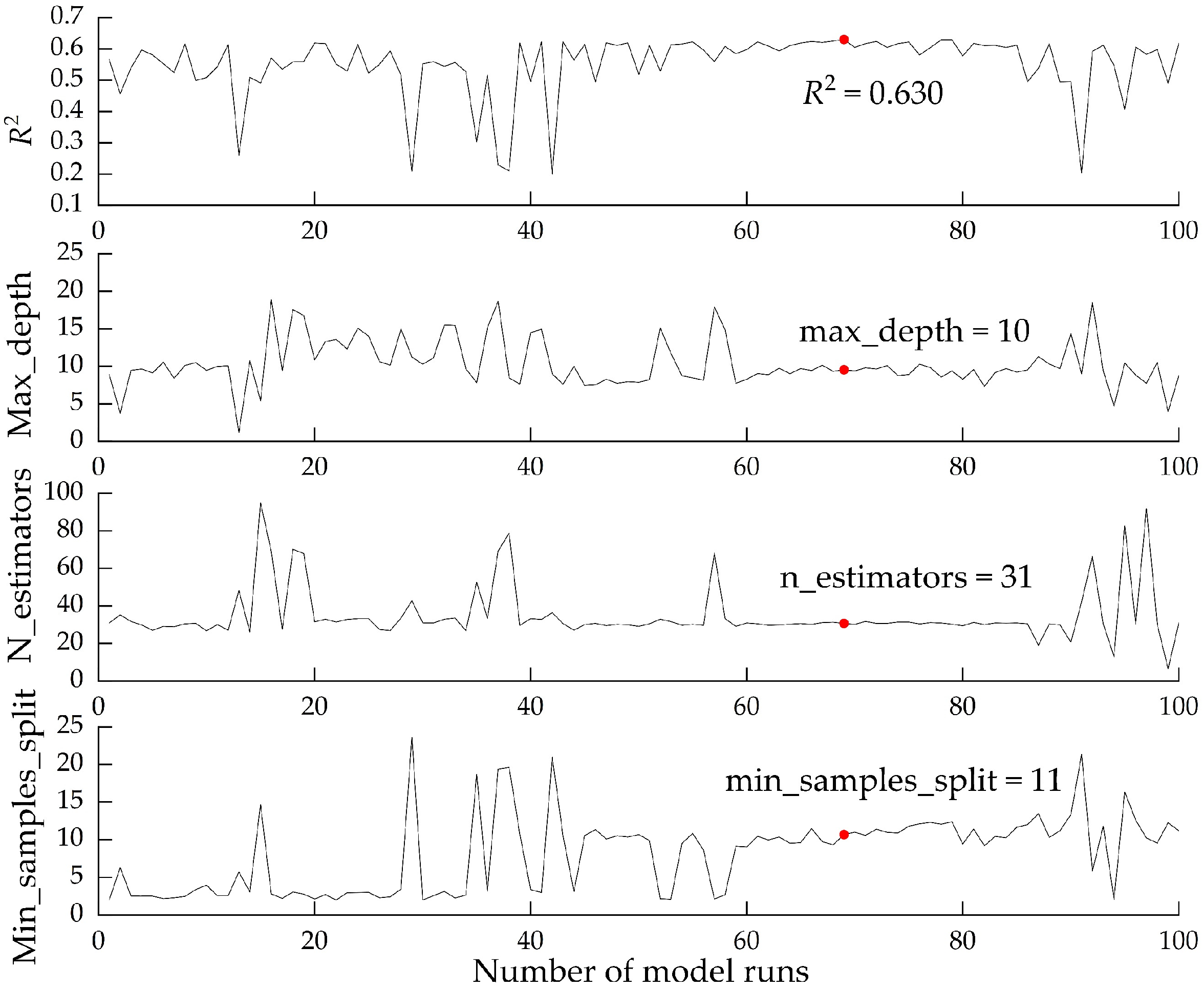
4.4. Hyperparametric Optimization of RF
4.5. Research Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Taghadosi, M.M.; Hasanlou, M.; Eftekhari, K. Retrieval of soil salinity from Sentinel-2 multispectral imagery. Eur. J. Remote Sens. 2019, 52, 138–154. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, F.; Zhang, X.; Chan, N.W.; Kung, H.-T.; Ariken, M.; Zhou, X.; Wang, Y. Regional suitability prediction of soil salinization based on remote-sensing derivatives and optimal spectral index. Sci. Total Environ. 2021, 775, 145807. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, F.; Ding, J.; Kung, H.-T.; Latif, A.; Johnson, V.C. Estimation of soil salt content (SSC) in the Ebinur Lake wetland National Nature Reserve (ELWNNR), Northwest China, based on a bootstrap-BP neural network model and optimal spectral indices. Sci. Total Environ. 2018, 615, 918–930. [Google Scholar] [CrossRef]
- Cerro, J.; Ulloa, C.; Barrientos, A.; Rivas, J. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- Ivushkin, K.; Bartholomeus, H.; Bregt, A.K.; Pulatov, A.; Franceschini, M.H.D.; Kramer, H.; van Loo, E.N.; Jaramillo Roman, V.; Finkers, R. UAV based soil salinity assessment of cropland. Geoderma 2019, 338, 502–512. [Google Scholar] [CrossRef]
- Wei, G.; Li, Y.; Zhang, Z.; Chen, Y.; Chen, J.; Yao, Z.; Lao, C.; Chen, H. Estimation of soil salt content by combining UAV-borne multispectral sensor and machine learning algorithms. PeerJ 2020, 8, e9087. [Google Scholar] [CrossRef]
- Ge, X.; Ding, J.; Jin, X.; Wang, J.; Chen, X.; Li, X.; Liu, J.; Xie, B. Estimating Agricultural Soil Moisture Content through UAV-Based Hyperspectral Images in the Arid Region. Remote Sens. 2021, 13, 1562. [Google Scholar] [CrossRef]
- Yu, X.; Chang, C.; Song, J.; Zhuge, Y.; Wang, A. Precise monitoring of soil salinity in China’s Yellow River Delta using UA V-borne multispectral imagery and a soil salinity retrieval index. Sensors 2022, 22, 546. [Google Scholar] [CrossRef]
- Yan, D.; Li, J.; Yao, X.; Luan, Z. Integrating UAV data for assessing the ecological response of Spartina alterniflora towards inundation and salinity gradients in coastal wetland. Sci. Total Environ. 2022, 814, 631. [Google Scholar] [CrossRef]
- Zhu, C.M.; Ding, J.L.; Zhang, Z.P.; Wang, Z. Exploring thepotential of UAV hyperspectral image for estimating soil salinity: Effects of optimal band combination algorithm and random forest. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2022, 121, 416. [Google Scholar]
- Emilien, A.V.; Thomas, C.; Thomas, H. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar]
- Qi, G.H.; Chang, C.Y.; Yang, W.; Gao, P.; Zhao, G.X. Soil salinity inversion in coastal corn planting areas by the satellite-UAV-ground integration approach. Remote Sens. 2021, 13, 3100. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, G.; Lang, K.; Su, B.; Chen, X.; Xi, X.; Zhang, H. Integrated satellite, unmanned aerial vehicle (UAV) and ground inversion of the SPAD of winter wheat in the reviving stage. Sensors 2019, 19, 1485. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Zhu, W.; Zhang, Z.; Chen, H.; Zhao, G.; Liu, P. Fusion level of satellite and UAV image data for soil salinity inversion in the coastal area of the Yellow River Delta. Int. J. Remote Sens. 2022, 43, 7039–7063. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, Q.; Huang, X.; Song, Z.; Zhang, J.; Tai, X. UAV-Satellite Remote Sensing Scale-up Monitoring Model of Soil Salinity Based on Dominant Class Variability-weighted Method. Trans. Chin. Soc. Agric. Mach. 2022, 53, 226–238+251. [Google Scholar]
- He, L.; Chen, W.; Leblanc, S.G.; Lovitt, J.; Arsenault, A.; Schmelzer, I.; Fraser, R.H.; Latifovic, R.; Sun, L.; Prévost, C.; et al. Integration of multi-scale remote sensing data for reindeer lichen fractional cover mapping in eastern Canada. Remote Sens. Environ. 2021, 267, 112731. [Google Scholar] [CrossRef]
- Wu, W.; Al-Shafie, W.M.; Mhaimeed, A.S.; Ziadat, F.; Nangia, V.; Payne, W.B. Soil salinity mapping by multiscale remote sensing in Mesopotamia, Iraq. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4442–4452. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, H.; Zhao, G.X.; Wang, Z.R.; Wang, D.Y. Spectral index fusion for salinized soil salinity inversion using Sentinel-2A and UAV images in a coastal area. IEEE Access 2020, 8, 159595–159608. [Google Scholar] [CrossRef]
- Wang, G.; Gertner, G.Z.; Anderson, A.B. Up-scaling methods based on variability-weighting and simulation for inferring spatial information across scales. Int. J. Remote Sens. 2004, 25, 4961–4979. [Google Scholar] [CrossRef]
- Feng, W.Z.; Wang, X.T.; Han, J.; Zhao, Y.X.; Liang, L.; Li, D.Q.; Tang, X.X.; Zhang, Z.T. Research on soil salinization monitoring based on scale conversion of satellite and UAV remote sensing data. Shandong Univ. Sci. Technol. 2020, 11, 87–93. [Google Scholar]
- Chen, J.Y.; Wang, X.T.; Zhang, Z.T.; Han, J.; Yao, Z.H.; Wei, G.F. Soil salinization monitoring method based on UAV-satellite remote sensing scale-up. Trans. Chin. Soc. Agric. Mach. 2019, 50, 161–169. [Google Scholar]
- Chen, C.; Bao, Y.X.; Zhu, F.; Yang, R.M. Remote sensing monitoring of rice growth under Cnaphalocrocis medinalis (Guenée) damage by integrating satellite and UAV remote sensing data. Int. J. Remote Sens. 2024, 45, 772–790. [Google Scholar] [CrossRef]
- Gao, Y.; Liang, Z.; Wang, B.; Wu, Y.; Shiyu, L. UAV and satellite remote sensing images based aboveground Biomass Inversion in the Meadows of Lake Shengjin. J. Lake Sci. 2019, 31, 517–528. [Google Scholar]
- Zhang, Y.; Hou, K.; Qian, H.; Gao, Y.; Fang, Y.; Xiao, S.; Tang, S.; Zhang, Q.; Qu, W.; Ren, W. Characterization of soil salinization and its driving factors in a typical irrigation area of Northwest China. Sci. Total Environ. 2022, 837, 155808. [Google Scholar] [CrossRef] [PubMed]
- Jia, P.P.; Zhang, J.H.; He, W.; Hu, Y.; Zeng, R.; Zamanian, K.; Jia, K.; Zhao, X. Combination of hyperspectral and machine learning to invert soil electrical conductivity. Remote Sens. 2022, 14, 2602. [Google Scholar] [CrossRef]
- Wang, F.; Shi, Z.; Biswas, A.; Yang, S.T.; Ding, J.L. Multi-algorithm comparison for predicting soil salinity. Geoderma 2020, 365, 114211. [Google Scholar] [CrossRef]
- Fathizad, H.; Ardakani, M.A.H.; Sodaiezadeh, H.; Kerry, R.; Taghizadeh-Mehrjardi, R. Investigation of the spatial and temporal variation of soil salinity using random forests in the central desert of Iran. Geoderma 2020, 365, 114233. [Google Scholar] [CrossRef]
- Chen, R.H.; Wang, Y.J.; Zhang, J.H.; Shang, T.H. Inversion of soil salinity in Yinchuan Plain based on fractional-order differential spectral index. Chin. J. Ecol. 2023, 42, 2296–2304. [Google Scholar]
- Ren, D.; Wei, B.; Xu, X.; Engel, B.; Li, G.; Huang, Q.; Xiong, Y.; Huang, G. Analyzing spatiotemporal characteristics of soil salinity in arid irrigated agro-ecosystems using integrated approaches. Geoderma 2019, 356, 113935. [Google Scholar] [CrossRef]
- Wang, Q.; Tang, Y.; Ge, Y.; Xie, H.; Tong, X.; Atkinson, P.M. A comprehensive review of spatial-temporal-spectral information reconstruction techniques. Sci. Remote Sens. 2023, 8, 100102. [Google Scholar] [CrossRef]
- Hu, J.; Peng, J.; Zhou, Y.; Xu, D.; Zhao, R.; Jiang, Q.; Fu, T.; Wang, F.; Shi, Z. Quantitative estimation of soil salinity using UAV-borne hyperspectral and satellite multispectral images. Remote Sens. 2019, 11, 736. [Google Scholar] [CrossRef]
- Bovik, A.C. The Essential Guide to Image Processing; Academic Press: Cambridge, MA, USA, 2009; pp. 43–68. [Google Scholar]
- Chen, Y.; Yang, R.; Zhao, N.; Zhu, W.; Huang, Y.; Zhang, R.; Chen, X.; Liu, J.; Liu, W.; Zuo, Z. Concentration Quantification of Oil Samples by Three-Dimensional Concentration-Emission Matrix (CEM) Spectroscopy. Appl. Sci. 2020, 10, 315. [Google Scholar] [CrossRef]
- Wu, M.Q.; Niu, Z.; Wang, C.Y. Mapping paddy fields by using spatial and temporal remote sensing data fusion technology. Trans. Chin. Soc. Agric. Eng. 2010, 26, 48–52. [Google Scholar]
- Ge, X.Y.; Wang, J.Z.; Ding, J.L.; Cao, X.Y.; Zhang, Z.P.; Liu, J.; Li, X.H. Combining UAV-based hyperspectral imagery and machine learning algorithms for soil moisture content monitoring. PeerJ 2019, 7, e6926. [Google Scholar] [CrossRef]
- Han, Y.; Ge, H.; Xu, Y.; Zhuang, L.; Wang, F.; Gu, Q.; Li, X. Estimating soil salinity using multiple spectral indexes and machine learning algorithm in songnen plain, China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 7041–7050. [Google Scholar]
- Abbas, A.; Khan, S. Using remote sensing techniques for appraisal of irrigated soil salinity. In Proceedings of the International Congresson Modelling and Simulation (MODSIM), Christchurch, New Zealand, 10–13December 2007; pp. 2632–2638. [Google Scholar]
- Douaoui, A.E.K.; Nicolas, H.; Walter, C. Detecting salinity hazards within a semiarid context by means of combining soil and remote-sensing data. Geoderma 2006, 134, 217–230. [Google Scholar] [CrossRef]
- Zhang, T.T.; Zeng, S.L.; Gao, Y.; Ouyang, Z.T.; Li, B.; Fang, C.M.; Zhao, B. Using hyperspectral vegetation indices as a proxy to monitor soil salinity. Ecol. Indic. 2011, 11, 1552–1562. [Google Scholar] [CrossRef]
- Allbed, A.; Kumar, L.; Aldakheel, Y.Y. Assessing soil salinity using soil salinity and vegetation indices derived from IKONOS high-spatial resolution imageries: Applications in a date palm dominated region. Geoderma 2014, 230–231, 1–8. [Google Scholar] [CrossRef]
- Dong, C.; Zhao, G.X.; Su, B.W.; Chen, X.N.; Zhang, S.M. Research on the Decision Model of Variable Nitrogen Application in Winter Wheat’s Greening Period Based on UAV Multispectral Image. Spectrosc. Spect. Anal. 2019, 39, 3599–3605. [Google Scholar]
- Dong, J.J.; Niu, J.M.; Zhang, Q.; Kang Sa, R.L.; Han, F. Remote sensing yield estimation of typical grassland based on multi-source satellite data. Chin. J. Grassl. 2013, 35, 64–69. [Google Scholar]
- Oussama, A.; Elabadi, F.; Platikanov, S.; Kzaiber, F.; Tauler, R. Detection of olive oil adulteration using FT-IR spectroscopy and PLS with variable importance of projection (VIP) scores. J. Am. Oil Chem. Soc. 2012, 89, 1807–1812. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Ding, J.L.; Tan, J.; Liu, J.H.; Zhang, T.T.; Cai, W.J.; Meng, S.S. UAV hyperspectral analysis of secondary salinization in arid oasis cotton fields: Effects of FOD feature selection and SOA-RF. Frontiers. Plant Sci. 2024, 15, 1358965. [Google Scholar] [CrossRef]
- Shahriari, B.; Swersky, K.; Wang, Z.; Adams, R.P.; Freitas, N.D. Taking the human out of the loop: A review of Bayesian optimization. Proc. IEEE 2016, 104, 148–175. [Google Scholar] [CrossRef]
- Miura, T.; Huete, A.; Yoshioka, H. An empirical investigation of cross-sensor relationships of NDVI and red/near-infrared reflectance using EO-1 Hyperion data. Remote Sens. Environ. 2006, 100, 223–236. [Google Scholar] [CrossRef]
- Jia, J.D.; Chen, C.; Liu, Q.; Ding, B.B.; Ren, Z.; Jia, Y.X.; Bai, X.Q.; Du, R.Q.; Chen, Q.D.; Wang, S.; et al. Soil salinity monitoring model based on the synergistic construction of ground-UA-satellite data. Soil Use. Manag. 2024, 40, e12980. [Google Scholar] [CrossRef]
- Qi, G.; Zhao, G.; Xi, X. Soil Salinity Estimation of Winter Wheat Areas Based on Satellite-Unmanned Aerial Vehicle-Ground Collaborative System in Coastal of the Yellow River Delta. Sensors 2020, 20, 6521. [Google Scholar] [CrossRef]
- Hu, Z.; Miao, Q.; Shi, H.; Feng, W.; Hou, C.; Yu, C.; Mu, Y. Spatial Variations and Distribution Patterns of Soil Salinity at the Canal Scale in the Hetao Irrigation District. Water 2023, 15, 3342. [Google Scholar] [CrossRef]
- Zhang, S.M.; Zhao, G.X. A Harmonious Satellite-Unmanned Aerial Vehicle-Ground Measurement Inversion Method for Monitoring Salinity in Coastal Saline Soil. Remote Sens. 2019, 11, 1700. [Google Scholar] [CrossRef]
- Zhu, W.; Rezaei, E.E.; Nouri, H.; Yang, T.; Li, B.; Gong, H.; Lyu, Y.; Peng, J.; Sun, Z. Quick detection of field-scale soil comprehensive attributes via the integration of UAV and sentinel-2B remote sensing data. Remote Sens. 2021, 13, 4716. [Google Scholar] [CrossRef]
- Xi, X.; Zhao, G.; Gao, P.; Cui, K.; Li, T. Inversion of soil salinity in coastal winter wheat growing area based on sentinel satellite and unmanned aerial vehicle multi-spectrum-A case study in Kenli district of the Yellow River delta. Sci. Agric. Sin. 2020, 53, 5005–5016. [Google Scholar]
- Ding, J.L.; Yu, D.L. Monitoring and evaluating spatial variability of soil salinity in dry and wet seasons in the Werigan–Kuqa oasis, China, using remote sensing and electromagnetic induction instruments. Geoderma 2014, 235–236, 316–322. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, L.; Sun, R.; Zhu, D.; Zhang, C.; Chen, Q. Retrieval of the soil salinity from Sentinel-1 dual-polarized SAR data based on deep neural network regression. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4006905. [Google Scholar] [CrossRef]
- Wang, J.Z.; Ding, J.L.; Yu, D.L.; Teng, D.X.; He, B.; Chen, X.Y.; Ge, X.Y.; Zhang, Z.P.; Wang, Y.; Yang, X.D.; et al. Machine learning-based detection of soil salinity in an arid desert region, Northwest China: A comparison between Landsat 8 OLI and Sentinel 2 MSI. Sci. Total Environ. 2020, 707, 136092. [Google Scholar] [CrossRef]
- Guo, Z.Q.; Li, X.; Ren, Y.S.; Qian, S.J.; Shao, Y.R. Research on regional soil moisture dynamics based on hyperspectral remote sensing technology. Int. J. Low Carbon Technol. 2023, 18, 737–749. [Google Scholar] [CrossRef]
- Hu, K.; Wang, S.; Li, H.; Huang, F.; Li, B. Spatial scaling effects on variability of soil organic matter and total nitrogen in suburban Beijing. Geoderma 2014, 226–227, 54–63. [Google Scholar] [CrossRef]
- Sun, M.; Li, Q.; Jiang, X.; Ye, T.; Li, X.; Niu, B. Estimation of soil salt content and organic matter on arable land in the Yellow River Delta by combining UAV hyperspectral and Landsat-8 multispectral imagery. Sensors 2022, 22, 3990. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.X.; Sun, Z.G.; Yang, T.; Li, J.; Peng, J.B.; Zhu, K.Y.; Li, S.J.; Gong, H.R.; Lyu, Y.; Li, B.B.; et al. Estimating leaf chlorophyll content of crops via optimal unmanned aerial vehicle hyperspectral data at multi-scales. Comput. Electron. Agric. 2020, 178, 105786. [Google Scholar] [CrossRef]
- Shams, M.Y.; Elshewey, A.M.; El-kenawy, E.S.M.; Ibrahim, A.; Talaat, F.M.; Tarek, Z. Water Quality Prediction Using Machine Learning Models Based on Grid Search Method. In Multimedia Tools and Applications; Springer: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Stuke, A.; Rinke, P.; Todorovic, M. Efficient Hyperparameter Tuning for Kernel Ridge Regression with Bayesian Optimization. Mach. Learn. Sci. Technol. 2021, 2, 035022. [Google Scholar] [CrossRef]
- Li, R.; Gao, X.; Shi, F.; Zhang, H. Scale Effect of Land Cover Classification from Multi-Resolution Satellite Remote Sensing Data. Sensors 2023, 23, 6136. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zuo, W.; Zhao, S.; Jiang, L.; Chen, L.; Zhu, Y. Uncertainty in Upscaling In Situ Soil Moisture Observations to Multiscale Pixel Estimations with Kriging at the Field Level. ISPRS In. J. Geo-Inf. 2018, 7, 33. [Google Scholar] [CrossRef]
- Cui, K.; Zhao, G.X.; Wang, Z.R.; Xi, X.; Gao, P.P.; Qi, G.H. Multi-scale spatial variability of soil salinity in typical fields of the Yellow River Delta in summer. Chin. J. Appl. Ecol. 2020, 31, 1451–1458. [Google Scholar]
- Qiu, X.C.; Gao, H.L.; Wang, Y.X.; Zhang, W.; Shi, X.D.; Lv, F.J.; Yu, Y.Q.; Luan, Z.R.; Wang, Q.Q.; Zhao, X.F. A scale conversion model based on deep learning of UAV images. Remote Sens. 2023, 15, 2449. [Google Scholar] [CrossRef]
- Wang, J.P.; Wu, X.D.; Wen, J.G.; Xiao, Q.; Gong, B.C.; Ma, D.J.; Cui, Y.R.; Lin, X.W.; Bao, Y.F. Upscaling in situ site-based albedo using machine learning models: Main controlling factors on results. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4403516. [Google Scholar] [CrossRef]
- Ge, X.; Ding, J.; Teng, D.; Wang, J.; Huo, T.; Jin, X.; Wang, J.; He, B.; Han, L. Updated soil salinity with fine spatial resolution and high accuracy: The synergy of sentinel-2 MSI, environmental covariates and hybrid machine learning approaches. CATENA 2022, 212, 106054. [Google Scholar] [CrossRef]
- Wang, Y.J.; Jia, P.P.; Chen, R.H.; Zhang, J.H. Sensitivity analysis and quantitative inversion of multi-source remote sensing to soil salt content in dry and wet seasons in Ningxia. Chin. J. Ecol. 2023, 42, 2286–2295. [Google Scholar]
- Miccinesi, L.; Beni, A.; Pieraccini, M. UAS-Borne Radar for Remote Sensing: A Review. Electronics 2022, 11, 3324. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Spectral Index | Formula | Reference |
|---|---|---|---|
| S1 | Salinity Index I | B/R | [37] |
| S2 | Salinity Index II | (B − R)/(B + R) | [37] |
| S3 | Salinity Index III | (G × R)/B | [37] |
| SI1 | Salinity Index 1 | (G × R)1/2 | [38] |
| SI2 | Salinity Index 2 | (G2 + R2 + NIR2)1/2 | [38] |
| NDVI | Normalized Difference Vegetation Index | (NIR − R)/(NIR + R) | [39] |
| NDSI | Normalized Difference Salinity Index | (R − NIR)/(R + NIR) | [40] |
| DVI | Difference Vegetation Index | NIR − R | [41] |
| GNDVI | Normalized Green Difference Vegetation Index | (NIR − G)/(NIR + G) | [42] |
| RDVI | Renormalized Difference Vegetation Index | (NIR − R)/(NIR + R)1/2 | [42] |
| Test | Sample Number | Salinity/g·kg−1 | ||
|---|---|---|---|---|
| Minimum | Maximum | Mean | ||
| Test Area 1 | 39 | 2.06 | 12.31 | 4.89 |
| Test Area 2 | 40 | 0.41 | 18.37 | 4.18 |
| Data Sources | Characteristic Variable | Max_ Depth | N_ Estimators | Min_Samples _Split | R2 |
|---|---|---|---|---|---|
| Original UAV data | S1, S2, S3, SI1, NDVI, NDSI, DVI, GNDV | 10 | 33 | 9 | 0.893 |
| Upscaled UAV data by DCVW | S1, S2, S3, SI1, NDVI, NDSI, GNDV | 9 | 32 | 8 | 0.858 |
| Upscaled UAV data by PA | S1, S2, S3, SI1, NDVI, NDSI, GNDV | 11 | 29 | 2 | 0.817 |
| Upscaled UAV data by NN | S1, S2, SI1, GNDV, DVI, RDVI | 10 | 27 | 3 | 0.738 |
| Upscaled UAV data by BI | S1, S2, NDVI, NDSI, GNDV, RDVI | 8 | 31 | 12 | 0.744 |
| Upscaled UAV data by CCI | S1, S2, S3, NDVI, NDSI, GNDV, RDVI | 12 | 33 | 3 | 0.794 |
| Sentinel-2 satellite data | S1, S2, NDVI, NDSI, DVI, RDVI | 10 | 31 | 11 | 0.630 |
| Data Sources | Modeling Set | Validation Set | ||
|---|---|---|---|---|
| R2 | RMSE (g·kg−1) | R2 | RMSE (g·kg−1) | |
| Sentinel-2 satellite data | 0.653 | 2.834 | 0.630 | 2.255 |
| Original UAV data | 0.853 | 1.844 | 0.893 | 1.448 |
| Upscaled UAV data by DCVW | 0.829 | 1.991 | 0.858 | 1.669 |
| Upscaled UAV data by PA | 0.762 | 2.349 | 0.817 | 1.897 |
| Upscaled UAV data by NN | 0.712 | 2.582 | 0.738 | 2.270 |
| Upscaled UAV data by BI | 0.702 | 2.628 | 0.744 | 2.242 |
| Upscaled UAV data by CCI | 0.836 | 1.948 | 0.794 | 2.010 |
| Degree of Salinization | Non-Saline | Slightly Saline | Moderately Saline | Strongly Saline | Extremely Saline |
|---|---|---|---|---|---|
| Pre-correction | 90.747 | 57.272 | 55.698 | 80.940 | 94.200 |
| Post-correction | 95.389 | 90.335 | 76.126 | 94.866 | 97.153 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, R.; Jia, K.; Li, H.; Zhang, J. Using Unmanned Aerial Vehicle Data to Improve Satellite Inversion: A Study on Soil Salinity. Land 2024, 13, 1438. https://doi.org/10.3390/land13091438
Liu R, Jia K, Li H, Zhang J. Using Unmanned Aerial Vehicle Data to Improve Satellite Inversion: A Study on Soil Salinity. Land. 2024; 13(9):1438. https://doi.org/10.3390/land13091438
Chicago/Turabian StyleLiu, Ruiliang, Keli Jia, Haoyu Li, and Junhua Zhang. 2024. "Using Unmanned Aerial Vehicle Data to Improve Satellite Inversion: A Study on Soil Salinity" Land 13, no. 9: 1438. https://doi.org/10.3390/land13091438