Single Image Rain Removal Based on Deep Learning and Symmetry Transform

Abstract
:1. Introduction
2. Materials and Algorithms
2.1. Image Denoising Algorithm Based on Wavelet Transform
2.1.1. Characteristics of Wavelet Transform
2.1.2. Denoising Process
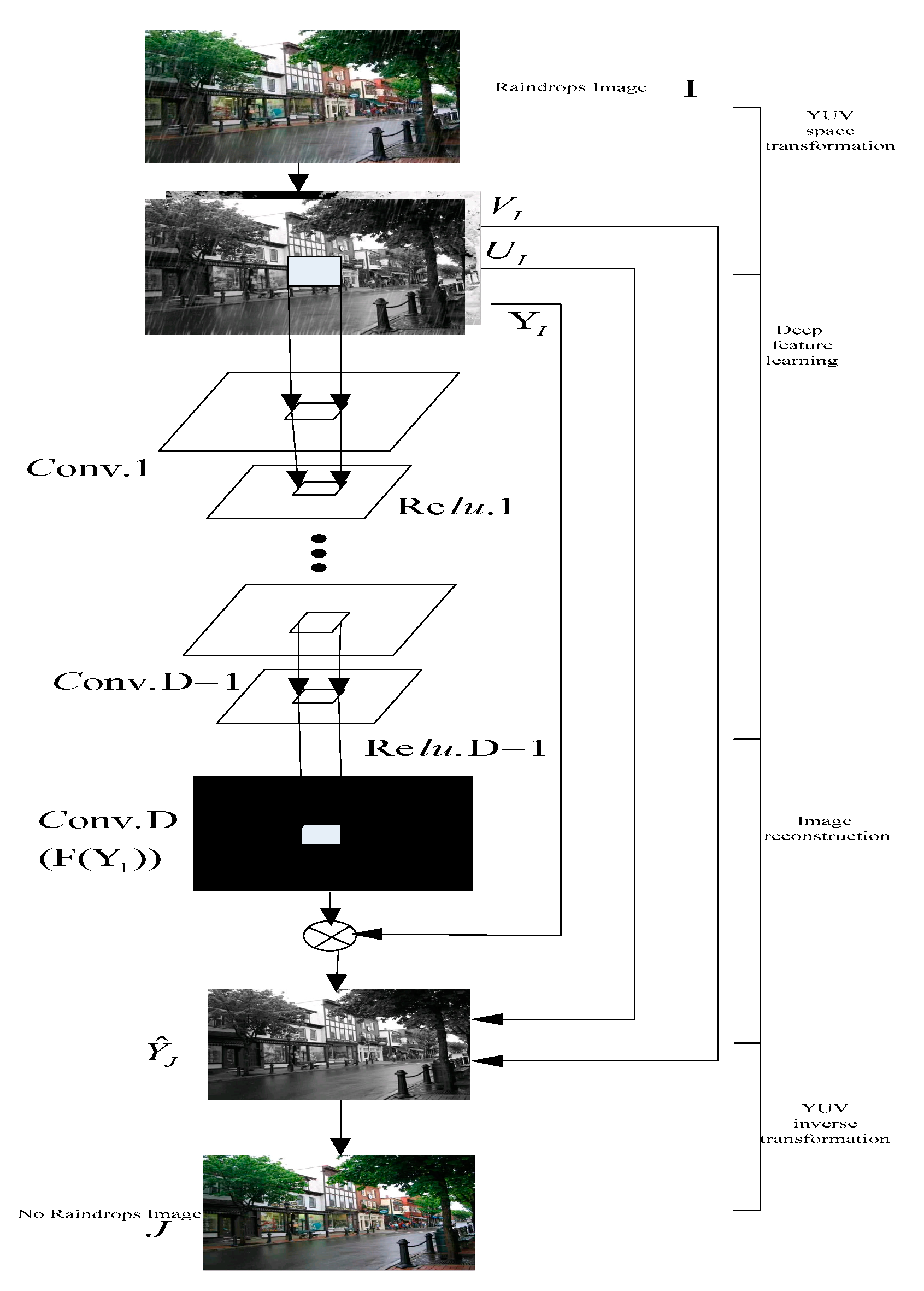
2.2. Raindrop Removal Model Based on Deep Learning
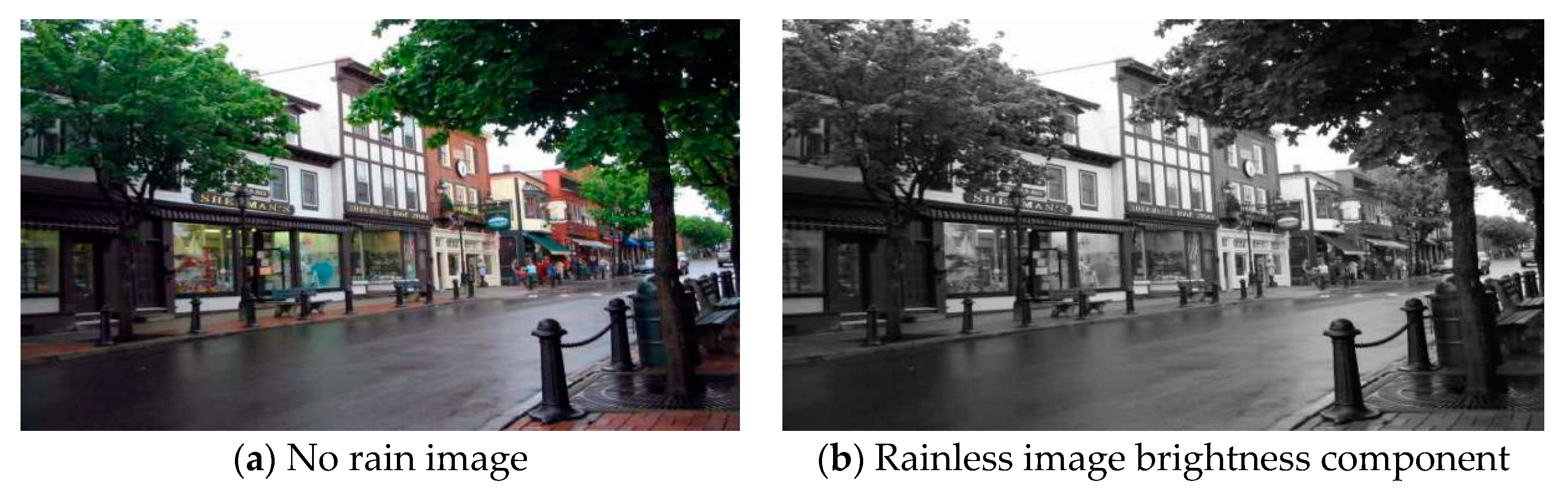
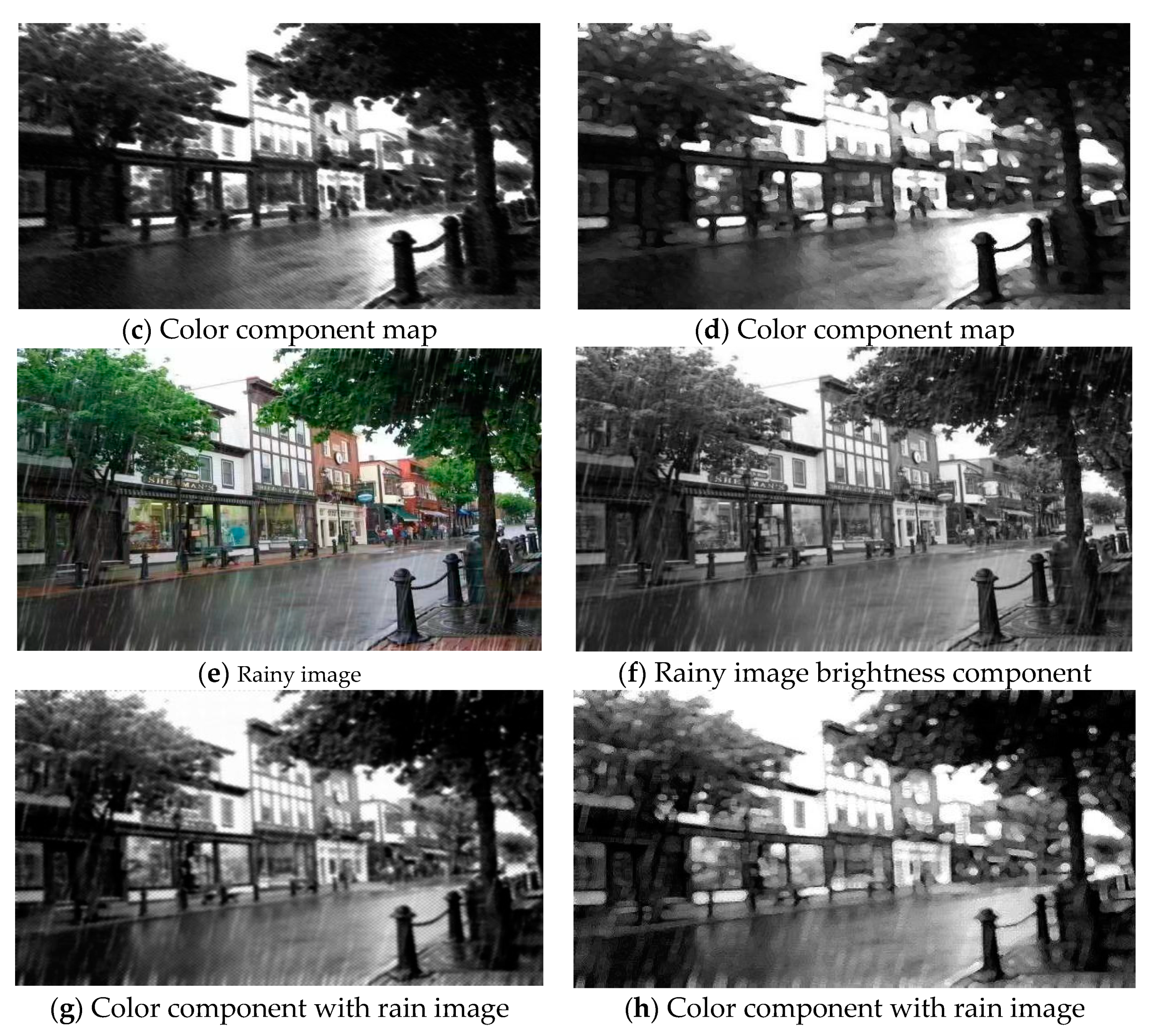
2.2.1. YUV Spatial Tansformation
2.2.2. Deep Feature Learning
2.2.3. Network Training Algorithm
3. Results
3.1. Denoising Experiment of Wavelet Transform
3.2. Simulated Rain Image
3.3. Experiment on Real Rain Image
4. Discussion
- (1)
- By analyzing the wavelet transform denoising experiments, we can know that the method in this paper has a better removal effect on mixed noise, which proves that this denoising algorithm has the advantages of maintaining good details and strong adaptability.
- (2)
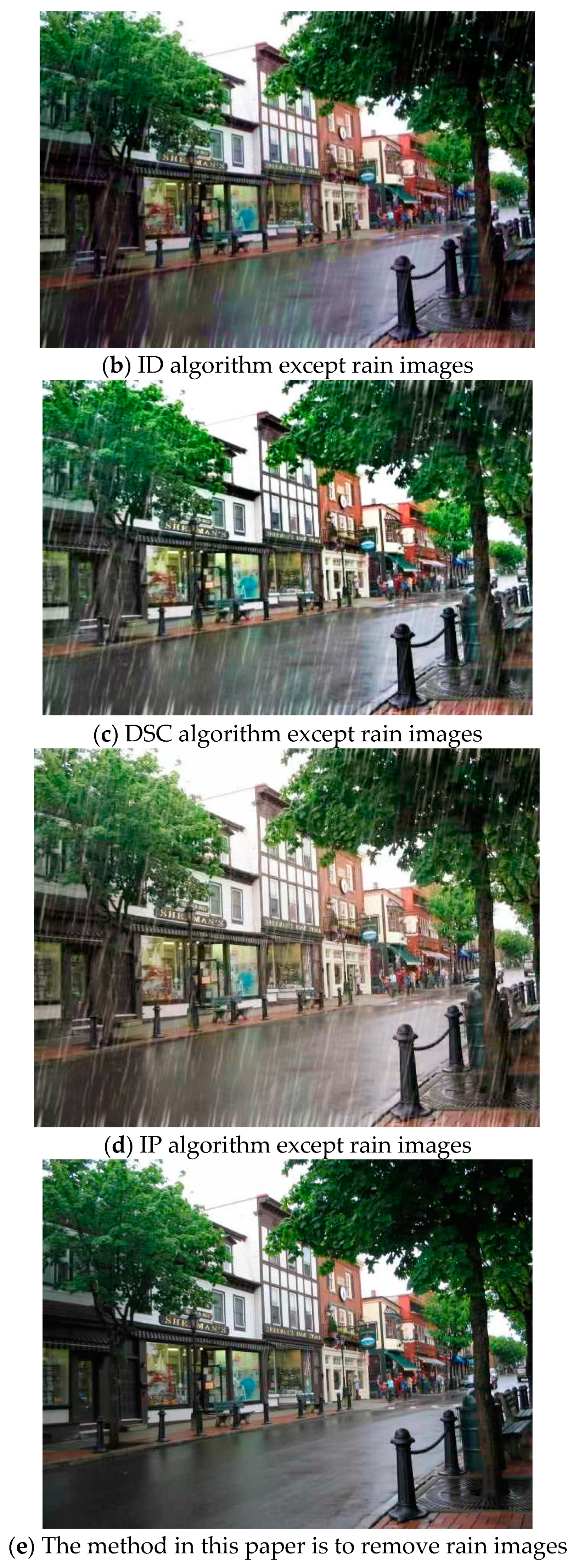
- It can be known from the analysis and simulation of rainy image experiments that the method in this paper can effectively remove rain lines in the image, while retaining the details of the original image and avoiding the loss of feature information. This is because the algorithm in this paper is based on the traditional deep convolutional neural network and incorporates wavelet transform. When there are textures in the image that are close to the direction of the rain line, these algorithms will incorrectly process non-rain objects, resulting in blurred image details. Compared with other algorithms, the algorithm in this paper has better visual effects, and has greater advantages in removing rain lines and retaining original image information.
- (3)
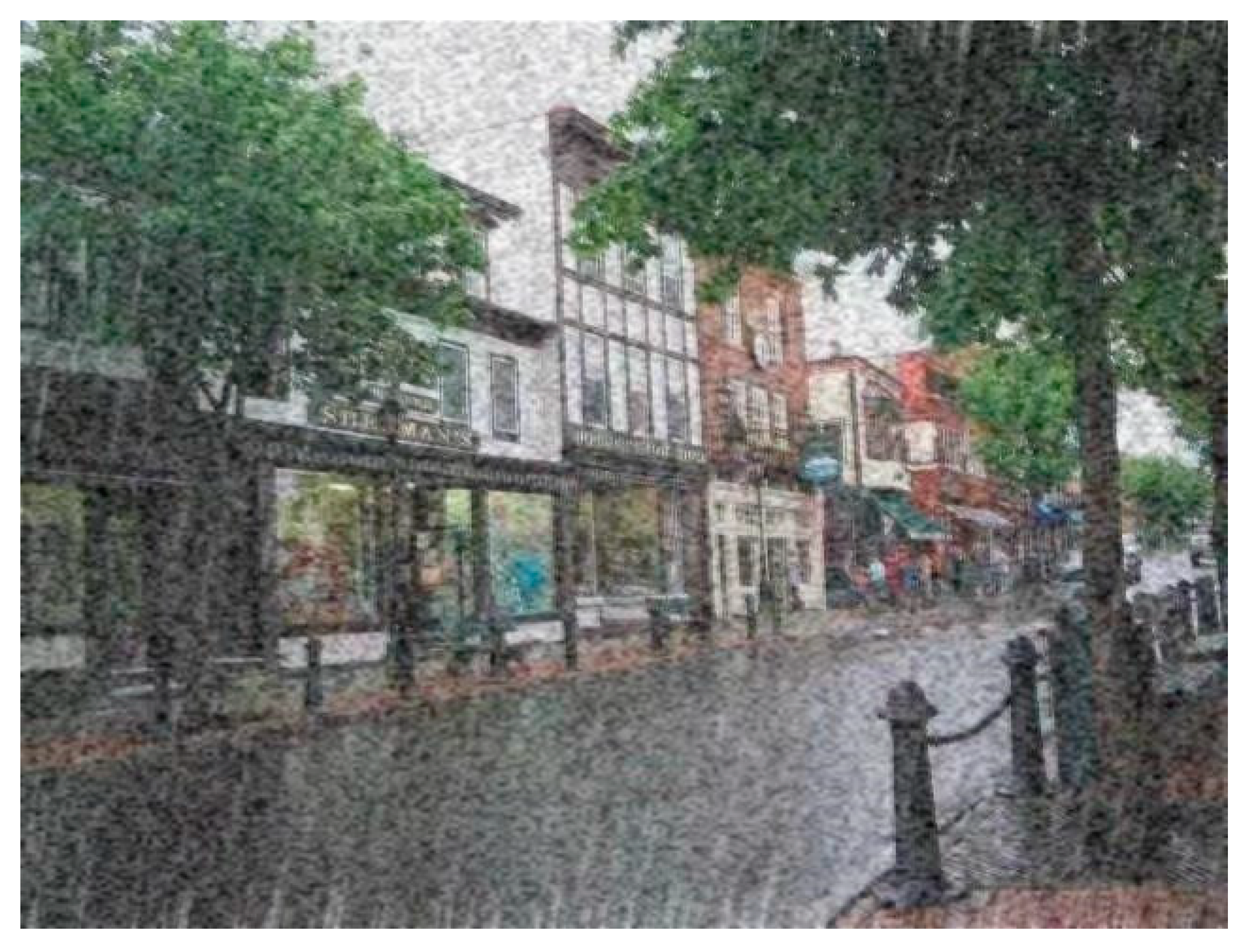
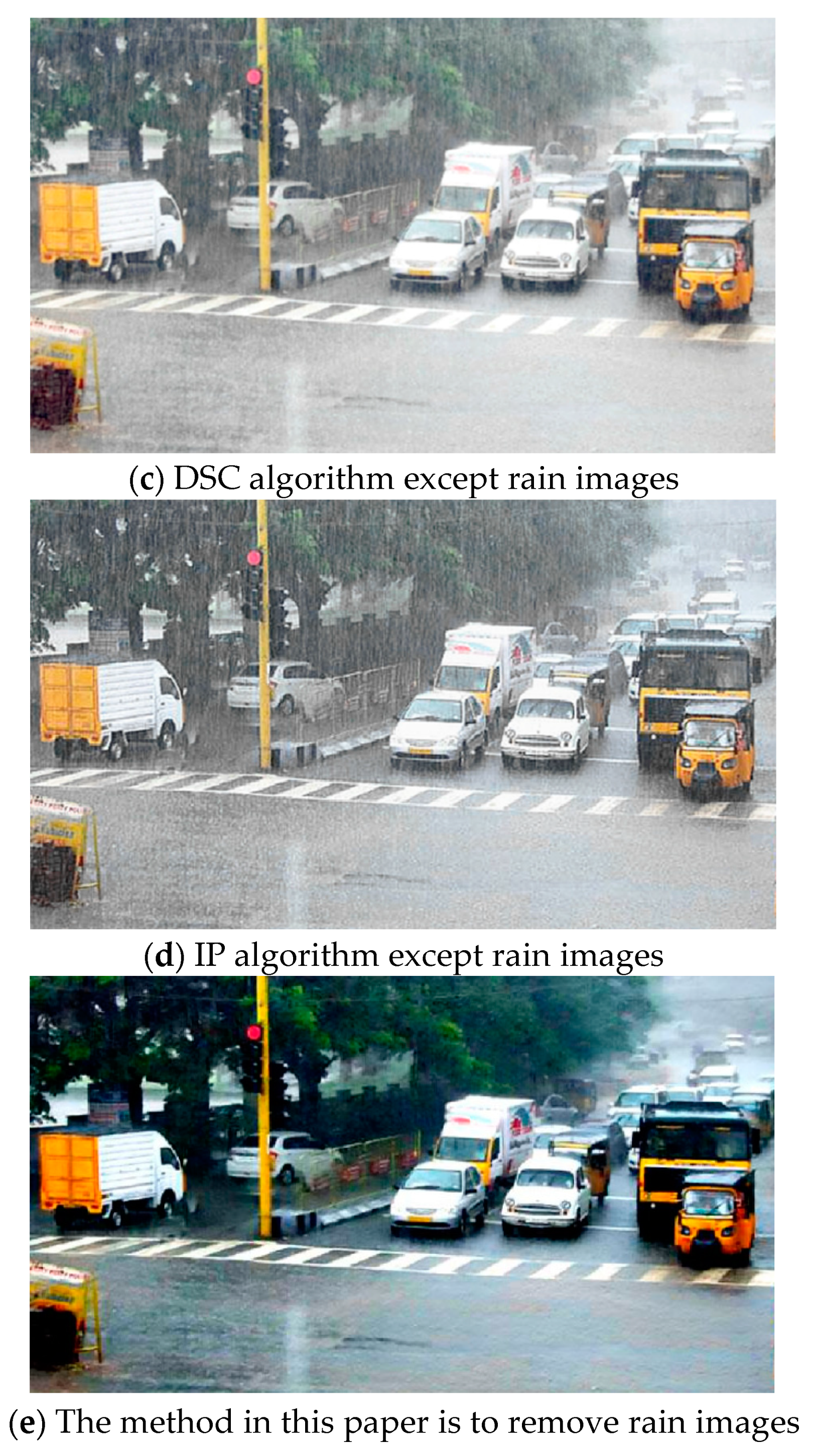
- The analysis of real rain image experiments shows that the proposed convolutional neural network model is trained using synthetic rain map data. The proposed algorithm still has a good rain removal effect on images under real rain. Even when the rain bars are obvious, the algorithm proposed in this paper still effectively removes the rain bars on the real rain map.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lin, X.W.; Zeng, H.Q.; Hou, J.H.; Zhu, J.Q.; Cai, C.H. Multi-detail Convolutional Neural Networks for Single Image Rain Removal. J. Signal Process. 2019, 35, 460–465. [Google Scholar]
- Zhong, F.; Yang, B. Novel Single Image Raindrop Removal Algorithm Based on Deep Learning. Comput. Sci. 2018, 45, 283–287. [Google Scholar]
- Liu, W.; Zha, Z.J.; Wang, Y. $p$-Laplacian Regularized Sparse Coding for Human Activity Recognition. IEEE Trans. Ind. Electron. 2016, 63, 5120–5129. [Google Scholar] [CrossRef]
- Pu, C.C.R.; Hong, J.C. Research on remote sensing image detection based on deep convolution neural network and significant image. Autom. Instrum. 2018, 12, 50–53, 57. [Google Scholar]
- Guo, J.C.; Guo, H.; Chunle, G. Single image rain removal based on multi-scale convolutional neural network. J. Harbin Inst. Technol. 2018, 50, 185–191. [Google Scholar]
- Jiang, Q.; Cai, R.J.; Ye, W.J.; Liu, Y.J.; Li, H.T.; He, W.X.; Liu, F. Video Image Denoising Technology Based on U-GAN Neural Network. Mod. Comput. 2018, 635, 37–40. [Google Scholar]
- Jing, F.; Zhou, L.W.; Lu, W.G. Design of Power Quality Monitoring Terminal Based on ADALINE Neural. J. Power Supply 2017, 15, 118–125. [Google Scholar]
- Gao, W.; Wang, W. A tight neighborhood union condition on fractional (g, f, n ’, m)-critical deleted graphs. Colloq. Math. 2017, 149, 291–298. [Google Scholar] [CrossRef]
- Li, Y.; Chi, Y. Off-the-Grid Line Spectrum Denoising and Estimation with Multiple Measurement Vectors. IEEE Trans. Signal Process. 2016, 64, 1257–1269. [Google Scholar] [CrossRef] [Green Version]
- Jiang, T.X.; Huang, T.Z.; Zhao, X.L. Fast De Rain: A Novel Video Rain Streak Removal Method Using Directional Gradient Priors. IEEE Trans. Image Process. 2018, 28, 1. [Google Scholar] [CrossRef] [Green Version]
- Hao, D.; Li, Q.; Li, C. Single-image-based rain streak removal using multidimensional variational mode decomposition and bilateral filter. J. Electron. Imaging 2017, 26, 013020. [Google Scholar] [CrossRef]
- Pnevmatikakis, E.A.; Soudry, D.; Gao, Y. Simultaneous Denoising, Deconvolution, and Demixing of Calcium Imaging Data. Neuron 2016, 89, 285–299. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, L.; Pan, Y.; Wang, J. Affine Transformation Based Ontology Sparse Vector Learning Algorithm. Appl. Math. Nonlinear Sci. 2017, 2, 111–122. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.C.; Li, B.; Fang, S. A restoration algorithm for rain video image. J. Hefei Univ. Technol. Nat. Sci. 2011, 34, 1011–1014. [Google Scholar]
- Fu, X.; Huang, J.; Ding, X. Clearing the Skies: A Deep Network Architecture for Single-Image Rain Removal. IEEE Trans. Image Process. 2017, 2944–2956. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Zhang, Z.W.; Xu, K. A New Adaptive Embedded Manifold Denoising Algorithm for Video Motion Object Segmentation. J. Jilin Univ. Sci. Ed. 2017, 55, 169–176. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images | 300 Virtual Images | Airplane | Bridge | |
|---|---|---|---|---|
| Peak signal-to-noise ratio | ID | 30.98 | 29.75 | 27.71 |
| DSC | 32.66 | 36.72 | 35.07 | |
| LP | 36.06 | 34.88 | 36.91 | |
| Algorithm of this paper | 37.15 | 39.25 | 39.83 | |
| Images | 300 Virtual Images | Airplane | Bridge | |
|---|---|---|---|---|
| Structural similarity | ID | 0.88 | 0.81 | 0.89 |
| DSC | 0.95 | 0.98 | 0.98 | |
| LP | 0.95 | 0.95 | 0.98 | |
| Algorithm of this paper | 0.97 | 0.99 | 0.99 | |
| Blind image quality index | Images | Street View |
| Simulate rain images | 36.59 | |
| ID | 42.45 | |
| DSC | 34.68 | |
| LP | 29.32 | |
| algorithm of this paper | 27.81 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Yu, M.; Xu, Y.; Cen, S. Single Image Rain Removal Based on Deep Learning and Symmetry Transform. Symmetry 2020, 12, 224. https://doi.org/10.3390/sym12020224
Yang Q, Yu M, Xu Y, Cen S. Single Image Rain Removal Based on Deep Learning and Symmetry Transform. Symmetry. 2020; 12(2):224. https://doi.org/10.3390/sym12020224
Chicago/Turabian StyleYang, Qing, Ming Yu, Yan Xu, and Shixin Cen. 2020. "Single Image Rain Removal Based on Deep Learning and Symmetry Transform" Symmetry 12, no. 2: 224. https://doi.org/10.3390/sym12020224
APA StyleYang, Q., Yu, M., Xu, Y., & Cen, S. (2020). Single Image Rain Removal Based on Deep Learning and Symmetry Transform. Symmetry, 12(2), 224. https://doi.org/10.3390/sym12020224