An Inertial Algorithm for Solving Hammerstein Equations



Abstract
:1. Introduction
“It is probably impossible to overestimate the importance of the inner product for the study of problems and phenomena which take place in a Hilbert space. However, many, and probably most, mathematical objects and models do not live in Hilbert spaces.”(Cioranescu [4], viii)
- (i)
- and ;
- (ii)
- and , for some and ;
- (iii)
- and .
- 1.
- Examples of spaces that possess the weak sequential continuity of the duality mapping are spaces, . However, for , spaces, , do not possess this property.
- 2.
- The recurrence relation of Theorem 1 contains the resolvent operator and the recurrence relation of Theorem 2 as well contains this resolvent operator.
“Can an iteration process be developed which will not involve the computation of at each step of the iteration process and which will guarantee strong convergence to a solution of ?”
- (i)
- is decreasing,
- (ii)
- for some constant ,
- (iii)
- Assume that there exists a constant such that , then, converges strongly to a solution of (7).
2. Preliminaries
- (i)
- ( means the graph of A);
- (ii)
- (iii)
- implies
3. Main Results
- (i)
- is decreasing;
- (ii)
- (iii)
- (iv)
- ,
- (v)
- ,
- (1)
- The space E is a real Banach space which is uniformly smooth.
- (2)
- The operator is set-valued m-accretive.
- (3)
- The set of zeros of A is nonempty and the control sequences satisfy assumptions (i)–(v).
4. Approximating Solutions of Hammerstein Equations
- (1)
- The space X is a real Banach spaces that is q-uniformly smooth, .
- (2)
- The operators F and K are as defined in Lemma 8.
- (3)
- The set of solutions of (20) is nonempty and the control sequences satisfy assumptions (i)–(v) above.
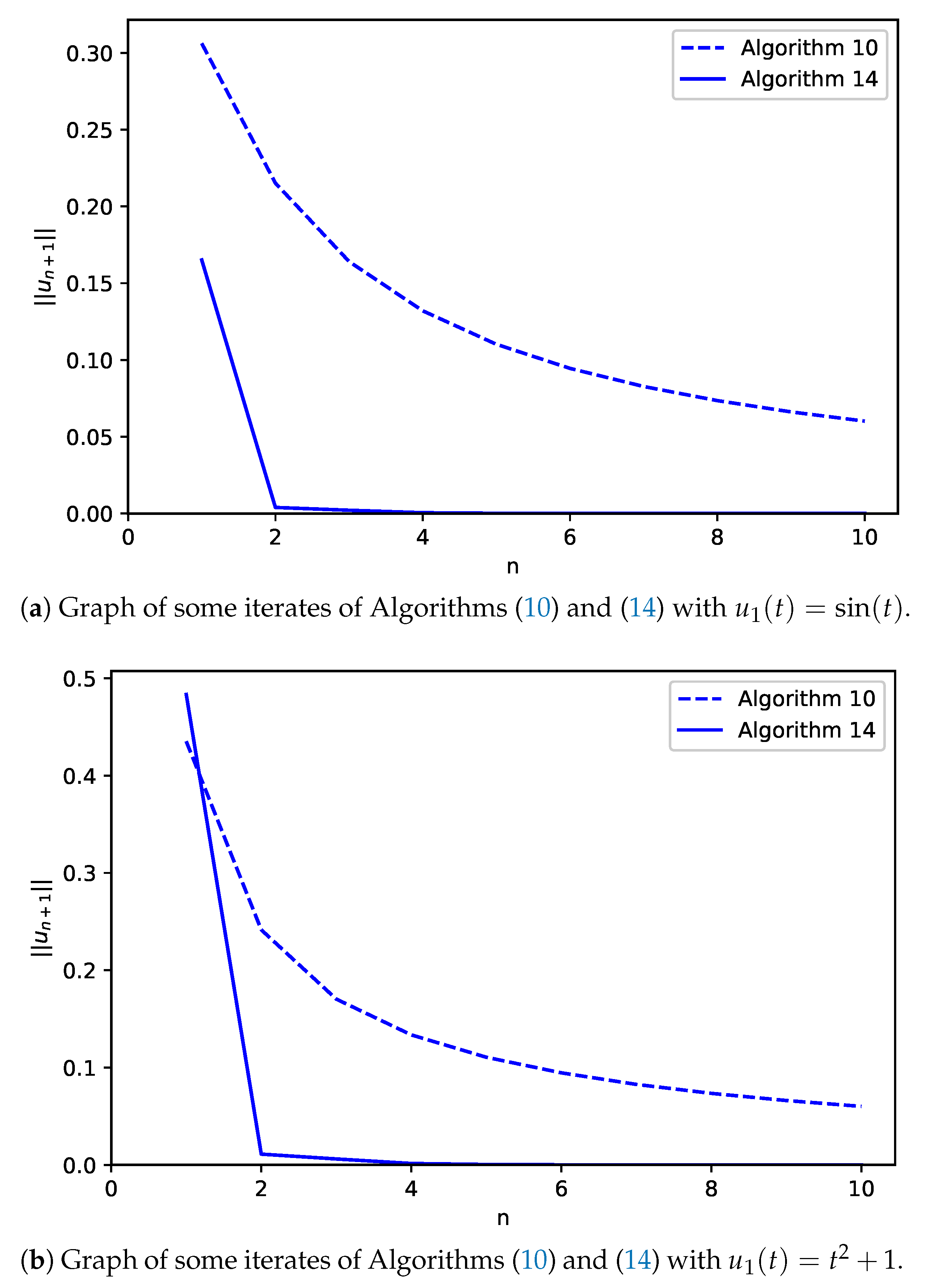
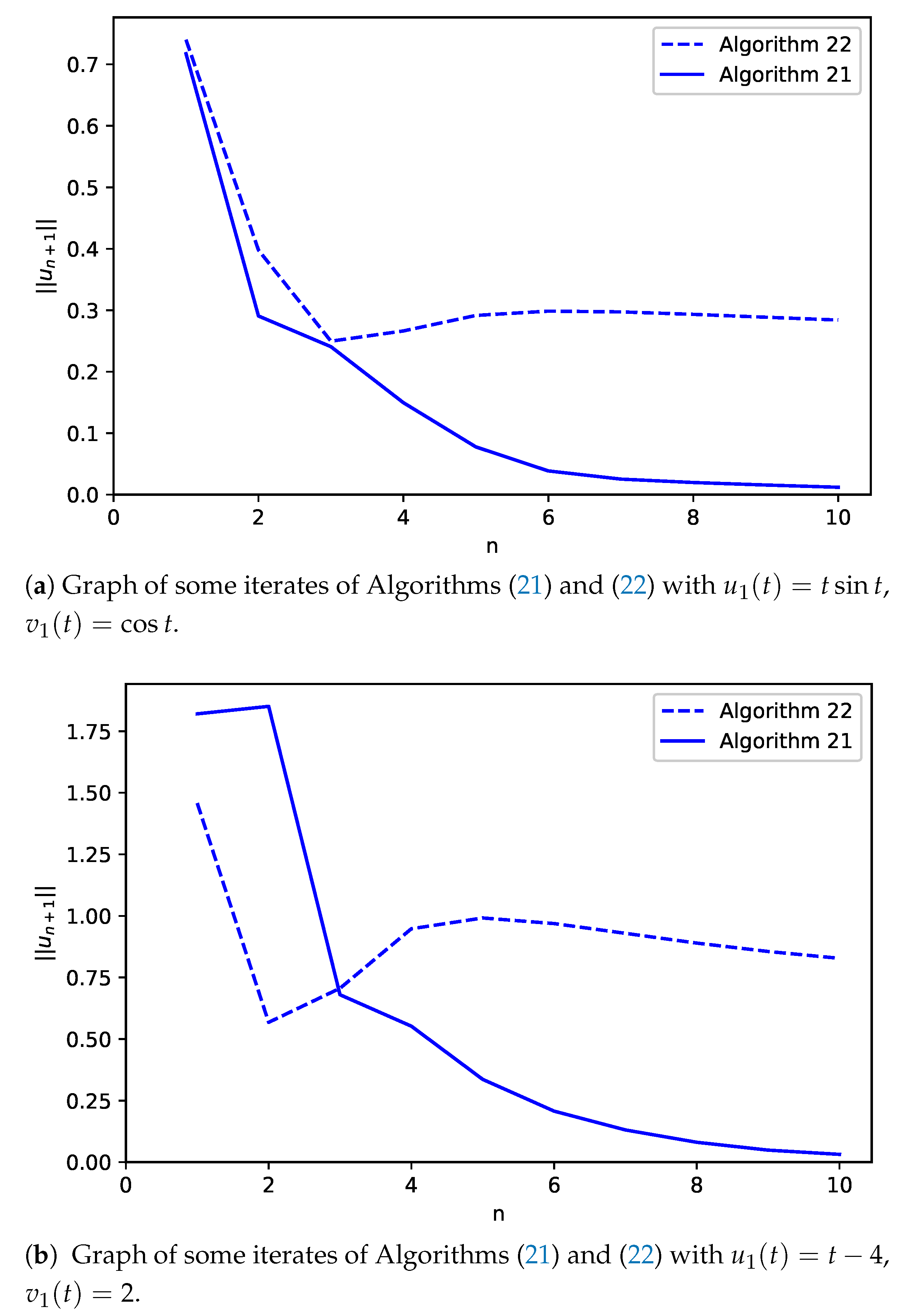
5. Numerical Experiments
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Polyak, B.T. Some methods of speeding up the convergence of iteration method. USSR Comput. Math. Phy. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Browder, F.E. Nonlinear mappings of nonexpansive and accretive-type in Banach spaces. Bull. Am. Math. Soc. 1967, 73, 875–882. [Google Scholar] [CrossRef] [Green Version]
- Kato, T. Nonlinear semigroups and evolution equations. J. Math. Soc. Jpn. 1967, 19, 511–520. [Google Scholar] [CrossRef]
- Cioranescu, I. Geometry of Banach Spaces, Duality Mappings and Nonlinear Problemss; Kluwer Academic Publisher: Bucharest, Romania, 1990; Volume 62. [Google Scholar]
- Barbu, V. Dissipative sets and nonlinear pertubated equations in Banach spaces. Ann. Sc. Norm. Pisa 1972, 26, 365–390. [Google Scholar]
- Brezis, H.; Pazy, A. Accretive sets and differential equations in Banach spaces. Israel J. Math. 1970, 8, 367–383. [Google Scholar] [CrossRef]
- Martinet, B. Régularisation ďinéquations variationnelles par approximations successives. Rev. Fr. Dinformatique Rech. Opér. 1970, 4, 154–158. [Google Scholar]
- Rockafellar, R.T. Monotone operators and the proximal point algorithm. SIAM J. Cont. Optim. 1976, 14, 877–898. [Google Scholar] [CrossRef] [Green Version]
- Chidume, C.E.; Adamu, A.; Minjibir, M.S.; Nnyaba, U.V. On the strong convergence of the proximal point algorithm with an application to Hammerstein equations. J. Fixed Point Theory Appl. 2020, 22. [Google Scholar] [CrossRef]
- Chidume, C.E.; De Souza, G.S.; Nnyaba, U.V.; Romanus, O.M.; Adamu, A. Approximation of zeros m-accretive mappings, with applications to Hammerstein integral equation. Caparthian J. Math. 2020, 36, 45–55. [Google Scholar]
- Xu, H.K. Strong convergence of an iterative method for nonexpansive and accretive operators. J. Math. Anal. Appl. 2006, 314, 631–634. [Google Scholar] [CrossRef]
- Qin, S.; Su, Y. Approximation of a zero point of a accretive operator in Banach spaces. J. Math. Anal. Appl. 2007, 329, 415–424. [Google Scholar] [CrossRef]
- Chidume, C.E. Strong convergence theorems for bounded accretive operators in uniformly smooth Banach spaces. Contemp. Math. 2016, 659, 31–41. [Google Scholar]
- Chidume, C.E.; Djitte, N. Strong convergence thoerems for bounded maximal monotone nonlinear operator U in Hilbert space. Abstr. Appl. Anal. 2012. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.B.; Roach, G.F. Characteristic inequalities of uniformly convex and uniformly smooth Banach space. J. Math. Anal. Appl. 1991, 157, 189–210. [Google Scholar] [CrossRef] [Green Version]
- Chidume, C.E. Geometric Properties of Banach Spaces and Nonlinear Iterations; Springer: London, UK, 2009. [Google Scholar]
- Xu, H.K. Iterative algorithm for nonlinear operators. J. Lond. Math. Soc. 2000. [Google Scholar] [CrossRef]
- Reich, S. Strong convergence theorems for resolvents of accretive operators in Banach spaces. J. Math. Anal. Appl. 1980, 75, 287–292. [Google Scholar] [CrossRef] [Green Version]
- Fitzpatrick, P.M.; Hess, P.; Kato, T. Local boundedness of monotone type operators. Proc. Jpn. Acad. 1972, 48, 275–277. [Google Scholar] [CrossRef]
- Pascali, D.; Sburian, S. Nonlinear Mappings of Monotone Type; Editura Academia Bucuresti: Bucharest, Romania, 1978. [Google Scholar]
- Chidume, C.E.; Adamu, A.; Chinwendu, L.O. Iterative algorithms for solutions of Hammerstein equations in real Banach spaces. Fixed Point Theory Appl. 2020. [Google Scholar] [CrossRef]
- Brézis, H.; Browder, F.E. Nonlinear integral equations and systems of Hammerstein type. Bull. Am. Math. Soc. 1976, 82, 115–147. [Google Scholar] [CrossRef] [Green Version]
- Browder, F.E.; De Figueiredo, D.G.; Gupta, C.P. Maximal monotone operators and nonlinear integral equations of Hammerstein type. Bull. Am. Math. Soc. 1970, 76, 700–705. [Google Scholar] [CrossRef] [Green Version]
- Browder, F.E.; Gupta, C.P. Monotone operators and nonlinear integral equations of Hammerstein type. Bull. Am. Math. Soc. 1969, 75, 1347–1353. [Google Scholar] [CrossRef]
- De Figueiredo, D.G.; Gupta, C.P. On the variational methods for the existence of solutions to nonlinear equations of Hammerstein type. Bull. Am. Math. Soc. 1973, 40, 470–476. [Google Scholar]
- Chidume, C.E.; Adamu, A.; Chinwendu, L.O. Approximation of solutions of Hammerstein equations with monotone mappings in real Banach spaces. Carpathian J. Math. 2019, 35, 305–316. [Google Scholar]
- Chidume, C.E.; Bello, A.U. An iterative algorithm for approximating solutions of Hammerstein equations with monotone maps in Banach spaces. Appl. Math. Comput. 2017, 313, 408–417. [Google Scholar] [CrossRef]
- Chidume, C.E.; Nnakwe, M.O.; Adamu, A. A strong convergence theorem for generalized-Φ-strongly monotone maps, with applications. Fixed Point Theory Appl. 2019. [Google Scholar] [CrossRef] [Green Version]
- Chidume, C.E.; Zegeye, H. Approximation of solutions of nonlinear equations of Hammerstein type in Hilbert space. Proc. Am. Math. Soc. 2005, 133, 851–858. [Google Scholar] [CrossRef]
- Chidume, C.E.; Adamu, A.; Nnakwe, M.O. Strong convergence of an inertial algorithm for maximal monotone inclusions with applications. Fixed Point Theory Appl. 2020. [Google Scholar] [CrossRef]
- Chidume, C.E.; Zegeye, H. Approximation of solutions of nonlinear equations of monotone and Hammerstein type. Appl. Anal. 2003, 82, 747–758. [Google Scholar]
- Shehu, Y. Strong convergence theorem for integral equations of Hammerstein type in Hilbert spaces. Appl. Math. Comput. 2014, 231, 140–147. [Google Scholar] [CrossRef]
- Chidume, C.E.; Zegeye, H. Iterative approximation of solutions of nonlinear equations of Hammerstein type. Abstr. Appl. Anal. 2003, 2003, 353–365. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chidume, C.E.; Adamu, A.; Nnakwe, M.O. An Inertial Algorithm for Solving Hammerstein Equations. Symmetry 2021, 13, 376. https://doi.org/10.3390/sym13030376
Chidume CE, Adamu A, Nnakwe MO. An Inertial Algorithm for Solving Hammerstein Equations. Symmetry. 2021; 13(3):376. https://doi.org/10.3390/sym13030376
Chicago/Turabian StyleChidume, Charles E., Abubakar Adamu, and Monday O. Nnakwe. 2021. "An Inertial Algorithm for Solving Hammerstein Equations" Symmetry 13, no. 3: 376. https://doi.org/10.3390/sym13030376