2.1. Structure Model and the Dynamic Model of the System
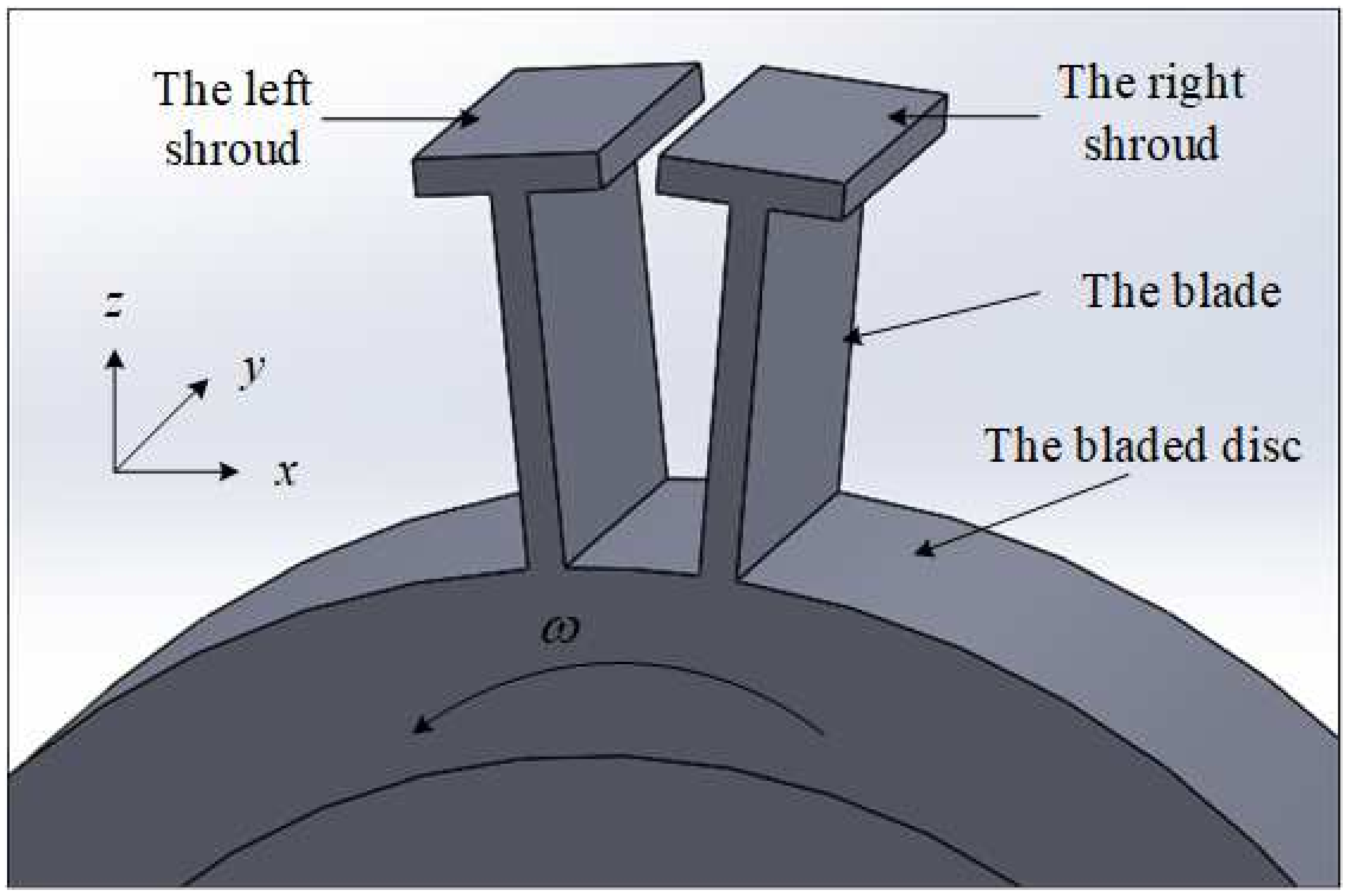
In engineering, shrouded blades are set up in a circle around the disc, and the whole structure can be considered to have a cyclic symmetry. In this paper, the structure model including two shrouded blades is discussed, as shown in
Figure 1, where the orthogonal coordinate system attached to the disc is defined by three orthogonal directions, namely the tangential direction (
), axial direction (
), and radial direction (
).
In
Figure 1, asymmetric collisions and the moments of aerodynamic excitation forces can excite the torsional vibration around
axis. The first-order bending vibration of the blades along the
direction and
direction and the first-order torsion vibration of the blades around the
axis will be coupled by the contact forces and aerodynamic excitation forces when adjacent shrouds are in contact. As the displacement along the
direction is very small compared with that along the
direction and
direction, it is ignored in this paper.
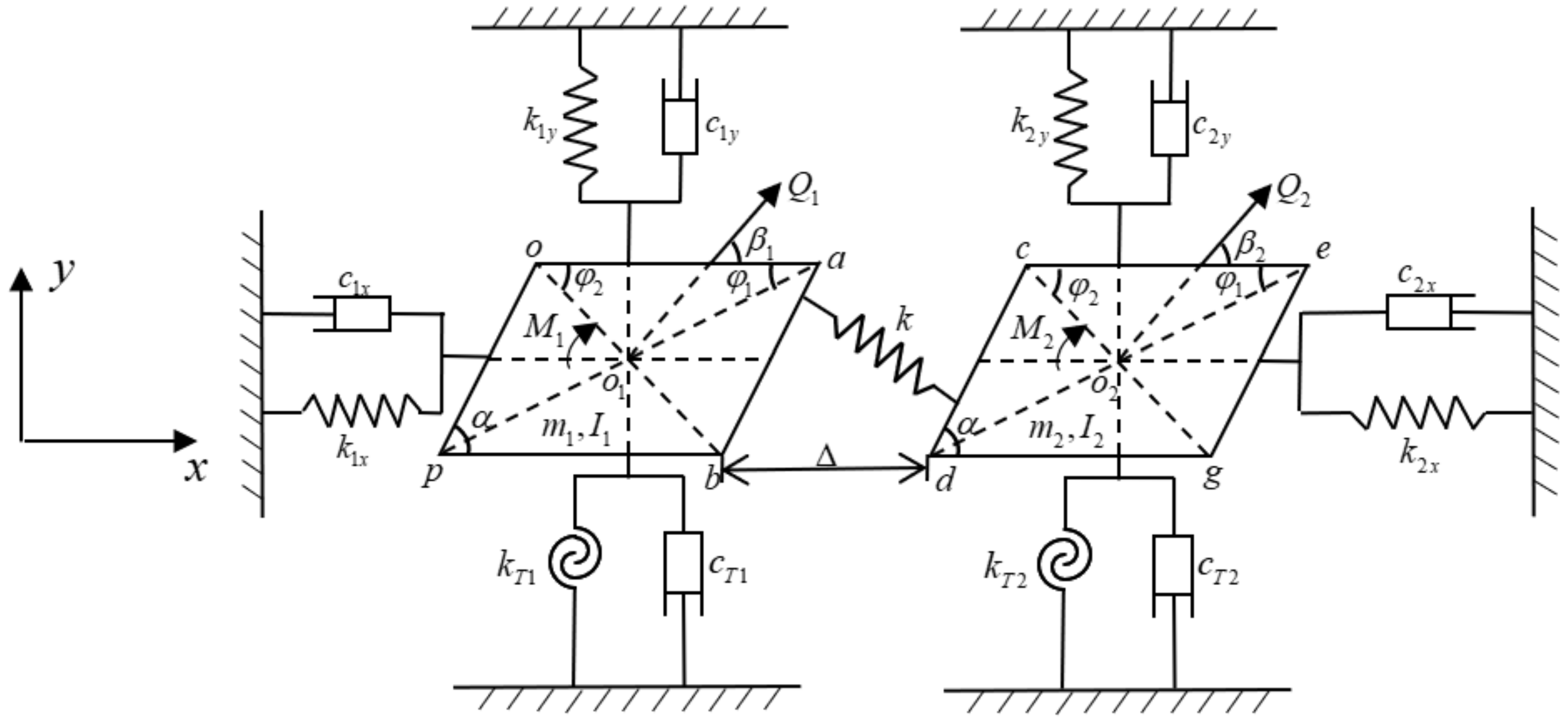
In order to analyze the complex collision motion between adjacent shrouds, adjacent shrouded blades are simplified as two homogeneous mass blocks which are two parallelograms with the same size and shape, and the dynamic model of the shrouded blade system, which is a three-degree-of-freedom mass-spring model, is established based on [
26] and shown in
Figure 2.
In
Figure 2, when the two mass blocks are in contact, the normal load
caused by impact is simulated by a linear spring, while the friction force
is modelled by the bilinear hysteresis model with normal load varying. It should be pointed out that
and
are forces exerted by the right mass on the left mass, and their action points which are determined by the kinematics analysis in the following section keep changing. The moments of
and
about points
and
can be calculated when the magnitude, direction, and acting point of the contact forces are determined. Meanwhile, the geometric dimensions of the mass blocks are identified in
Figure 2: one of the vertex angles of the parallelogram shroud is
; the lengths of the two line segments
and
are denoted as
and
,
and
are denoted similarly.
The dynamic parameters of the system are denoted as follows. The equivalent masses of the two adjacent blades are denoted as and , while the moments of inertia about the corresponding axis are denoted as and . The first-order bending stiffnesses along the and directions are denoted as , and , respectively, and the corresponding linear damping coefficients are denoted as , and , , respectively. The torsional stiffnesses about the corresponding axis are denoted as and , and the corresponding torsional damping coefficients are denoted as and . The centers of the two mass blocks are and , and are principle vectors of aerodynamic excitation forces acting on the two mass blocks which pass through the center of the corresponding mass blocks, and the angles between , and the axis are and , respectively. and are the moments of the aerodynamic excitation forces about points and , and the impact stiffness is denoted as , while the initial gap between two adjacent shrouds is .
According to
Figure 2 and the theory of vibration, the dynamic equation of the shrouded blade system can be written as
In Equation (1), the projections of displacements of point
along the
and
directions are
and
, and
,
are denoted similarly. The torsional angles around the corresponding
axis of the two mass blocks are
and
. The projections of
and
along the
and
axes are
and
and
and
, respectively. The moments of
and
about point
are
and
, while the moments of the reaction of
and
about point
are
and
. The determination of
,
,
,
,
,
,
, and
will be analyzed in
Section 2.3.
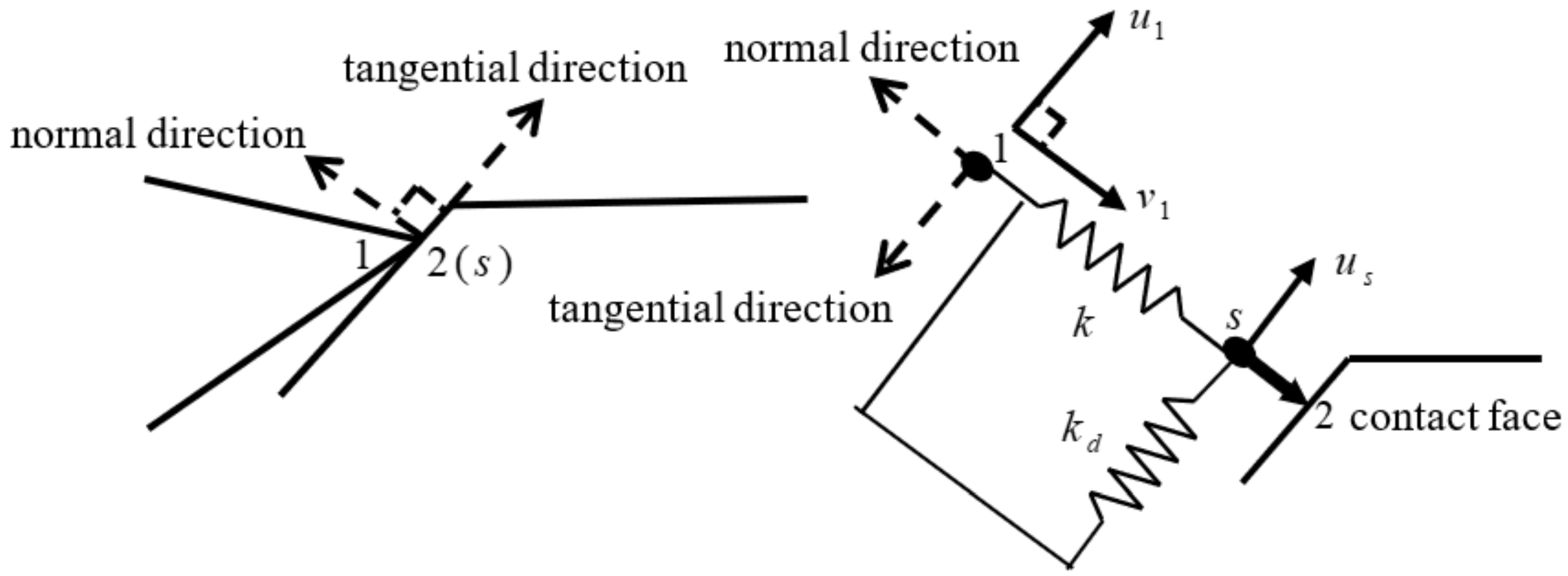
2.2. The Dry Friction Force Model and Stick-Slip Transition Analysis
As shown in
Figure 3, in this paper, the relative contact motion between two blades is point to surface contact. Normal collision motion leads to the variation of the normal load, while tangential contact movement leads to stick-slip transition, and the torsion motion makes the direction of the contact force vary. The bilinear hysteresis model including the varying normal load [
5,
8], which is suitable for simulating this kind of dry friction contact, is adopted. Note that the typical hysteretic behavior characterizing dry-friction phenomena can be simulated by adopting more accurate hysteretic models available in the literature [
28,
29].
In
Figure 3, the friction force is modelled by a spring along the tangential direction with its stiffness
, and the spring has no initial length and can yield, while the normal load is modelled by a spring along the normal direction with its stiffness
. The dynamic friction coefficient is denoted as
. The stick-slip transition mechanism at the contact face is illustrated as follows. When the two mass blocks are in contact, point 1 represents the tip of one of the mass blocks, while point 2 is always attached to the other mass block in contact with point 1. Point s is the sliding contact point which can slide relative to point 2 with a limiting friction force
. When contact happens, points 1, 2, and s coincide initially, contact surface is in a viscous state, and point s is attached to point 2. The displacement of point 1 relative to the contact surface along normal directions is denoted as
, while the displacements of points 1 and s relative to point 2 are denoted as
and
, respectively. In contact motion, point s remains static with point 2 when the distance between points 1 and s is less than
; otherwise, point s slides relative to point 2 and keeps the distance between point 1 and s as a constant
. The friction force can be determined by Equation (2), whether it is viscous or sliding, and it is important to trace the position of point s.
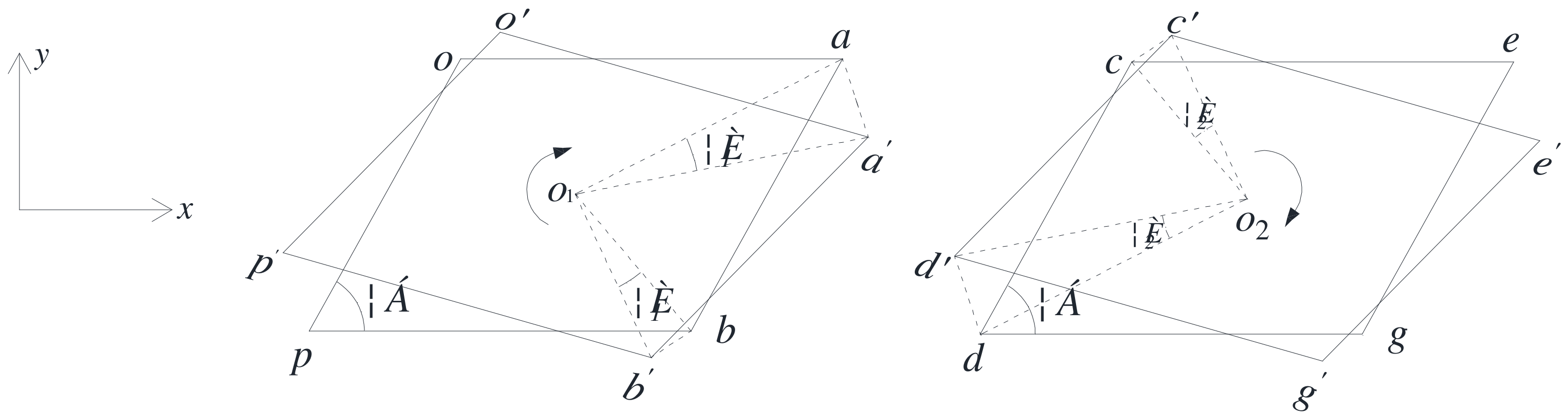
2.3. The Separation-Contact Motion Analysis and Determination of Contact Forces and Their Moments
When the aero engine is working, the relative motions of two adjacent shrouds are very complex, as the bending-torsion coupling vibration of the blades is considered. The bending-torsion coupling vibration of the blades can be simplified as the planar motion of two mass blocks, which consists of the translation with the corresponding center of the mass block and the rotation around the corresponding central
axis. Displacements caused by torsional motion of the mass blocks are shown in
Figure 4.
The torsional angle is assumed to be positive along the clockwise direction. As shown in
Figure 4, the two mass blocks rotate at an angle of
and
separately around the
z-axis, which passes through points
and
, respectively, while points
,
,
, and
move to a new position,
,
,
, and
. Thus, the displacement vectors of the four points are obtained. The projections of the torsional displacements of points
,
,
, and
along the
and
axes can be described as Equations (3) and (4):
In Equation (3),
and
are the projections of the torsion displacements of points
and
along the
direction, while
and
are the projections of points
and
along the
direction.
In Equation (4), and are the projections of the torsion displacements of points and along the direction, while and are the projections of points and along the direction.
Based on the analysis above, the total displacement vectors of points
,
,
, and
, denoted as
,
,
, and
, are composed of the translational displacements and the torsional displacements. The computing formulas can be expressed as
In Equations (5) and (6), , , , and are the projections of the total displacements of points , , , and along the direction, while , , , and are the projections of points , , , and along the direction.
Kinematics analysis shows that there are four kinds of contact-separation transition boundary conditions under bending-torsion coupling vibration. In each case, the friction force is calculated with reference to Equation (2).
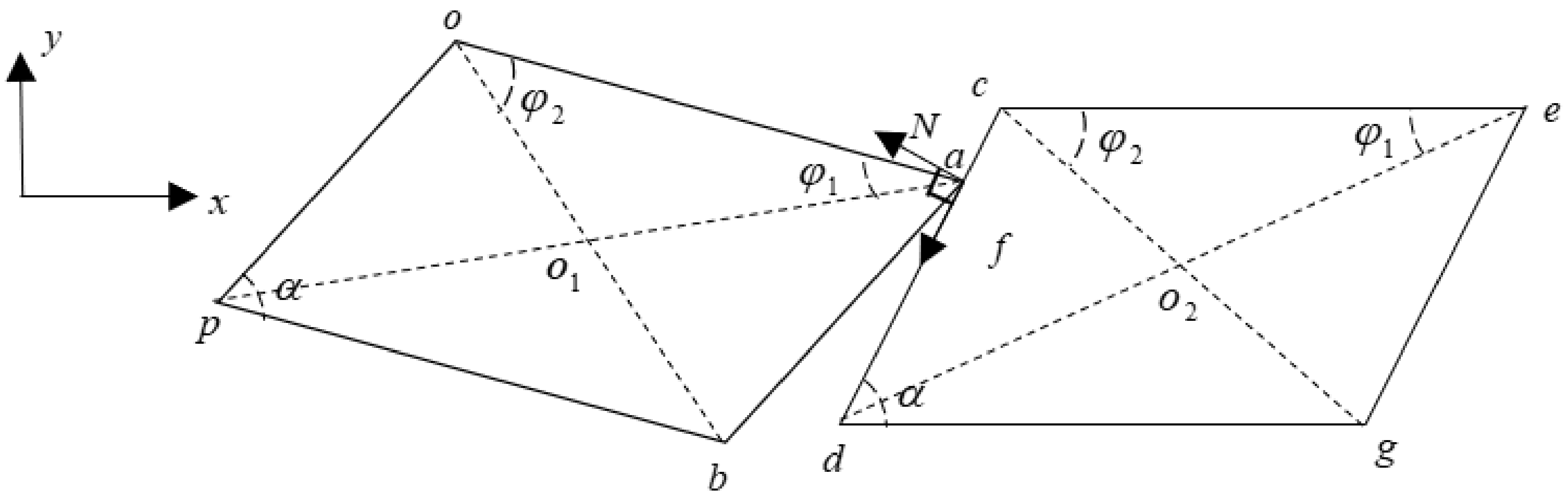
As shown in
Figure 5, when point
happens to be in contact with the right mass block, the difference between projections of displacements of points
and
along the direction perpendicular to
is equal to the projection of the initial gap
along this direction. The first contact-separation transition boundary condition can be described as Equation (7):
Obviously, there are two states of separation and contact.
Separation: when , the two masses are separated, and the contact forces and corresponding moments about points and are all equal to zero.
Contact: when , the two masses are in contact.
In the process of the contact motion under bending-torsion coupling vibration, the magnitude, direction, and acting point of contact forces change constantly, which can be determined by kinematics and dynamics analysis, and the corresponding calculation formulas are derived in Equations (8)–(10):
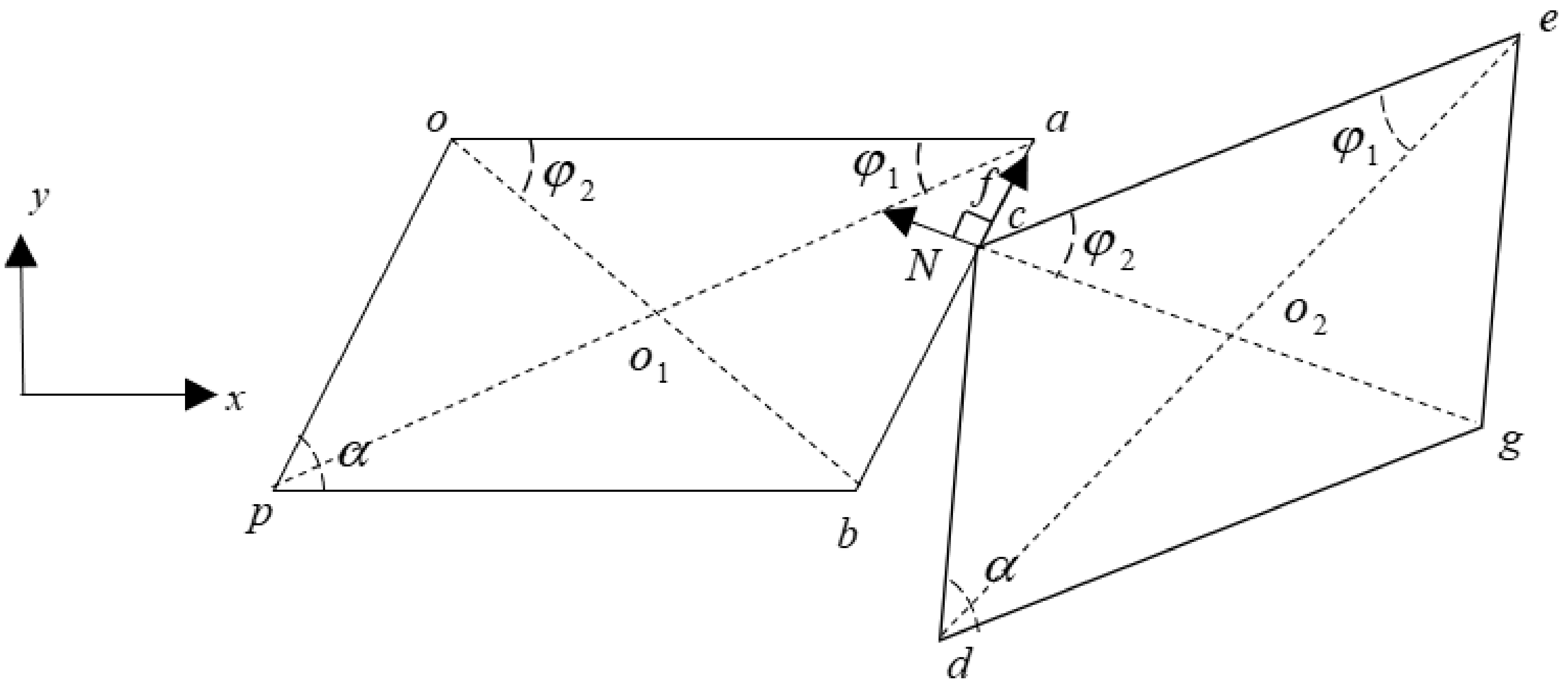
As shown in
Figure 6, when point
happens to be in contact with the left mass block, the difference between projections of displacements of points
and
along the direction perpendicular to
is equal to the projection of the initial gap
along this direction. The second contact-separation transition boundary condition is described as Equation (11):
Obviously, there are two states of separation and contact.
Separation: when , the two masses are separated, and the contact forces and corresponding moments about points and are all equal to zero.
Contact: when , the two masses are in contact.
The magnitude, direction, and acting point of contact forces vary during the contact motion and can be determined by kinematics and dynamics analysis; the corresponding calculation formulas are derived in Equations (12)–(14):
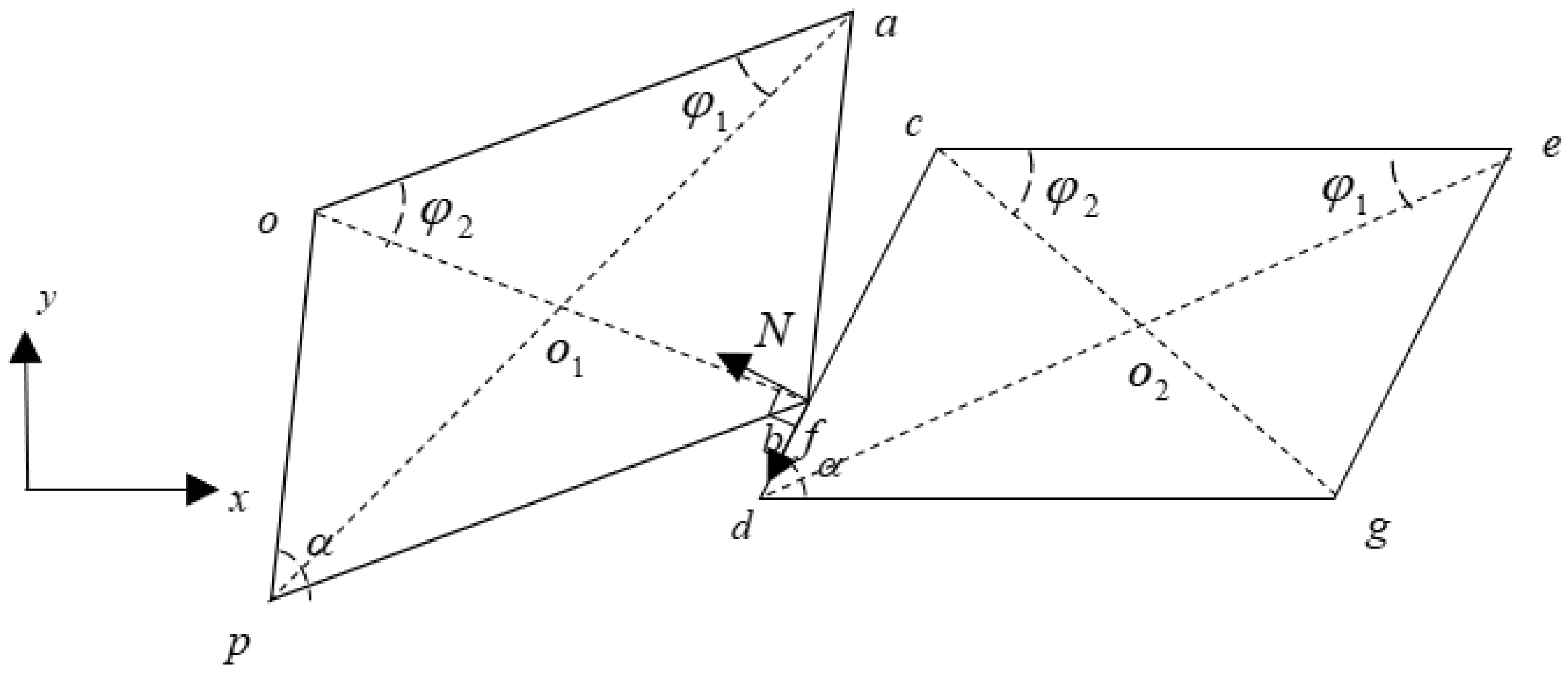
As shown in
Figure 7, when point
happens to be in contact with the right mass block, the difference between projections of displacements of points
and
along the direction perpendicular to
is equal to the projection of the initial gap
along this direction. The third contact-separation transition boundary condition is described as Equation (15):
Obviously, there are two states of separation and contact.
Separation: when , the two masses are separated, and the contact forces and corresponding moments about points and are all equal to zero.
Contact: when , the two masses are in contact.
During the contact motion, the magnitude, direction, and acting point of contact forces change and can be determined by kinematics and dynamics analysis; the corresponding calculation formulas are derived in Equations (16) and (17) (
,
and
,
are still obtained by Equation (9)):
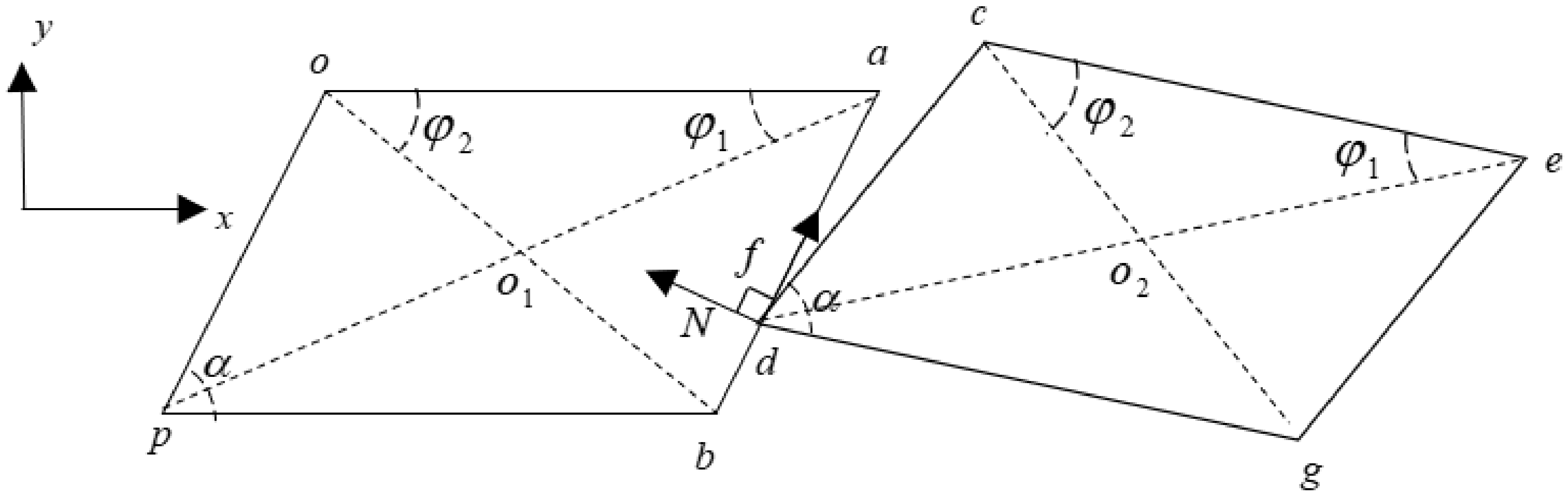
As shown in
Figure 8, when point
happens to be in contact with the left mass block, the difference between projections of displacements of points
and
along the direction perpendicular to
is equal to the projection of the initial gap
along this direction. The fourth contact-separation transition boundary condition can be described as Equation (18):
Obviously, there are two states of separation and contact.
Separation: when , the two masses are separated, and the contact forces and corresponding moments about points and are all equal to zero.
Contact: when , the two masses are in contact.
Contact forces change during the contact motion, and their magnitude, direction, and acting point can be determined by kinematics and dynamics analysis; the corresponding calculation formulas are derived in Equations (19) and (20) (
,
and
,
are still obtained by Equation (13)):























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}