
Nonlocal Symmetry, Painlevé Integrable and Interaction Solutions for CKdV Equations


Abstract
:1. Introduction and Motivation
2. Preliminaries
Method for Seeking Nonlocal Symmetries
3. The Nonlocal Symmetry of the CKdV Equations
4. Localization of the Nonlocal Symmetry
5. Symmetry Reduction to the CKdV Equation
5.1. Symmetry Reduction and Painlevé Integrable to the CKdV Equations
5.2. Symmetry Reduction and Group Invariant Solutions to the CKdV Equation
6. Conclusions and Further Researches
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lie, S. Sophus Lie’s 1880 Transformation Group Paper; Ackerman, M., Hermann, R., Eds.; Mathematical Sciene Press: Brookline, MA, USA, 1975. [Google Scholar]
- Freire, I.L.; Torrisi, M. Symmetry methods in mathematical modeling of Aedes aegypti dispersal dynamics. Nonlinear Anal-Real 2013, 14, 1300. [Google Scholar] [CrossRef]
- Hussain, A.; Bano, S.; Khan, I.; Baleanu, D.; Nisar, K.S. Lie Symmetry Analysis, Explicit Solutions and Conservation Laws of a Spatially Two-Dimensional Burgers-Huxley Equation. Symmetry 2020, 12, 170. [Google Scholar] [CrossRef] [Green Version]
- Aliyu, A.I.; Inc, M.; Yusuf, A.; Baleanu, D. Symmetry Analysis, Explicit Solutions, and Conservation Laws of a Sixth-Order Nonlinear Ramani Equation. Symmetry 2018, 10, 341. [Google Scholar] [CrossRef] [Green Version]
- Krasil’shchik, I.S.; Vinogradov, A.M. A method of calculating higher symmetries of nonlinear evolutionary equations, and nonlocal symmetries. Dokl. Akad. Nauk SSSR 1980, 253, 1289. [Google Scholar]
- Galas, F. New nonlocal symmetries with pseudopotentials. J. Phys. A Math. Gen. 1992, 25, L981. [Google Scholar] [CrossRef]
- Bluman, G.W.; Cheviakov, A.F.; Anco, S.C. Applications of Symmetry Methods to Partial Differential Equations; Springer: New York, NY, USA, 2010. [Google Scholar]
- Bluman, G.W.; Cheviakov, A.F. Framework for potential systems and nonlocal symmetries: Algorithmic approach. J. Math. Phys. 2005, 46, 123506. [Google Scholar] [CrossRef] [Green Version]
- Euler, N.; Euler, M. On Nonlocal Symmetries, Nonlocal Conseration Laws and Nonlocal Transformations of Evolution Equation: Two linearisable Hierarchies. J. Nonlinear Math. Phys. 2009, 16, 489. [Google Scholar] [CrossRef] [Green Version]
- Euler, M.; Euler, N.; Reyes, E.G. Multipotentializations and nonlocal symmetries: Kupershmidt, Kaup-Kupershmidt and Sawada-Kotera equations. J. Nonlinear Math. Phys. 2017, 24, 303. [Google Scholar] [CrossRef]
- Lou, S.Y.; Hu, X.B. Nonlocal Lie-Bäclund symmetries and Olver symmetries of the KdV equation. Chin. Phys. Lett. 1993, 10, 577. [Google Scholar] [CrossRef]
- Lou, S.Y.; Hu, X.R.; Chen, Y. Nonlocal symmetries related to Bäcklund transformation and their applications. J. Phys A Math. Gen. 2012, 45, 155205. [Google Scholar] [CrossRef] [Green Version]
- Lou, S.Y. Negative Kadomtsev-Petviashvili hierarchy. Phys. Scr. 1998, 57, 481. [Google Scholar] [CrossRef]
- Reyes, E.G. The modified Camassa-Holm equation. Int. Math. Res. Notices 2015, 12, 2617. [Google Scholar]
- Gao, X.N.; Lou, S.Y.; Tang, X.Y. Bosonization, singularity analysis, nonlocal symmetry reductions and exact solutions of supersymmetric KdV equation. J. High Energy Phys. 2013, 5, 029. [Google Scholar] [CrossRef] [Green Version]
- Xin, X.P.; Miao, Q.; Chen, Y. Nonlocal symmetry, optimal systems, and explicit solutions of the mKdV equation. Chin. Phys. B 2014, 23, 010203. [Google Scholar] [CrossRef]
- Miao, Q.; Xin, X.P.; Chen, Y. Nonlocal symmetries and explicit solutions of the AKNS system. Appl. Math. Lett. 2014, 28, 7. [Google Scholar] [CrossRef]
- Ren, B.; Cheng, X.P.; Lin, J. The (2+ 1)-dimensional Konopelchenko-Dubrovsky equation: Nonlocal symmetries and interaction solutions. Nonlinear Dyn. 2016, 86, 1855. [Google Scholar] [CrossRef]
- Huang, L.L.; Chen, Y. Nonlocal symmetry and similarity reductions for a (2 + 1)-dimensional Korteweg-de Vries equation. Nonlinear Dyn. 2018, 92, 221. [Google Scholar] [CrossRef]
- Xia, Y.R.; Xin, X.P.; Zhang, S.L. Residual symmetry, interaction solutions, and conservation laws of the (2+1)-dimensional dispersive long-wave system. Chin. Phys. B 2017, 26, 030202. [Google Scholar] [CrossRef]
- Xia, Y.R.; Xin, X.P.; Zhang, S.L. Nonlinear Self-Adjointness, Conservation Laws and Soliton-Cnoidal Wave Interaction Solutions of (2+1)-dimensional Modified Dispersive Water-Wave System. Commun. Theor. Phys. 2017, 67, 15. [Google Scholar] [CrossRef]
- Xin, X.P.; Liu, H.Z.; Zhang, L.L.; Wang, Z.G. High order nonlocal symmetries and exact interaction solutions of the variable coefficient KdV equation. Appl. Math. Lett. 2019, 88, 132. [Google Scholar] [CrossRef]
- Feng, Y.; Bilige, S.; Wang, X. Diverse exact analytical solutions and novel interaction solutions for the (2+1)-dimensional Ito equation. Phys. Scr. 2020, 95, 095201. [Google Scholar] [CrossRef]
- Kumar, S.; Kumar, A.; Kharbanda, H. Lie symmetry analysis and generalized invariant solutions of (2+1)-dimensional dispersive long wave (DLW) equations. Phys. Scr. 2020, 95, 065207. [Google Scholar] [CrossRef]
- Xin, X.P.; Zhang, L.L.; Xia, Y.R.; Liu, H.Z. Nonlocal symmetries and exact solutions of the (2+1)-dimensional generalized variable coefficient shallow water wave equation. Appl. Math. Lett. 2019, 94, 112. [Google Scholar] [CrossRef] [Green Version]
- Xia, Y.R.; Yao, R.X.; Xin, X.P. Nonlocal symmetries and group invariant solutions for the coupled variable-coefficient Newell-Whitehead system. J. Nonlinear Math. Phys. 2020, 27, 581. [Google Scholar] [CrossRef]
- Lou, S.Y. Alice-Bob systems, symmetry invariant and symmetry breaking soliton solutions. J. Math. Phys. 2018, 59, 083507. [Google Scholar] [CrossRef]
- Gear, J.A.; Grimshaw, R. Weak and srong interactions between interal solitary waves. Stud. Appl. Math. 1984, 70, 235. [Google Scholar] [CrossRef]
- Lou, S.Y.; Tong, B.; Hu, H.C.; Tang, X.Y. CKdV equations derived from two-layer fluids. J. Phys. A Math. Gen. 2006, 39, 513. [Google Scholar] [CrossRef] [Green Version]
- Hirota, R.; Satsuma, J. Soliton solutions of a couple Korteweg-de-Vries equation. Phys. Lett. A 1981, 85, 407. [Google Scholar] [CrossRef]
- Ramani, A.; Dorizzi, B.; Grammaticos, B. Integrability of Hirota-Satsuma equations: Two tests. Phys. Lett. A 1983, 99, 411. [Google Scholar] [CrossRef]
- Xu, M.H.; Jia, M. Exact Solutions, Symmetry Reductions, Painlevé Test and Bäcklund Transformations of A CKdV Equation. Commun. Theor. Phys. 2017, 68, 417. [Google Scholar]
- Parra, H.P.; Cisneros-Ake, L.A. The direct method for multisolitons and two-hump solitons in the Hirota-Satsuma system. Phys. Lett. A 2020, 384, 126471. [Google Scholar] [CrossRef]
- Milovanovic, G.V.; Parmar, R.K.; Rathie, A.K. Certain Laplace transforms of convolution type integrals involving product of two special pFp functions. Demonstr. Math. 2018, 51, 264. [Google Scholar] [CrossRef]
- Fitri, S.; Marjono, M.; Thomas, D.K.; Wibowo, R.B.E. Coefficient inequalities for a subclass of Bazilevic functions. Demonstr. Math. 2020, 53, 27. [Google Scholar] [CrossRef]
- Kumar, H.; Kumar, A.; Ch, F.; Singh, R.M.; Gautam, M.S. Construction of new traveling and solitary wave solutions of a nonlinear PDE characterizing the nonlinear low-pass electrical transmission lines. Phys. Scr. 2021, 96, 085215. [Google Scholar] [CrossRef]
- Riaz, M.B.; Atangana, A.; Jhangeer, A.; Rehman, M.J.U. Some exact explicit solutions and conservation laws of Chaffee-Infante equation by Lie symmetry analysis. Phys. Scr. 2021, 96, 084008. [Google Scholar] [CrossRef]
- Shen, Y.; Tian, B.; Liu, S.H.; Yang, D.Y. Bilinear Bäcklund transformation, soliton and breather solutions for a (3+1)-dimensional generalized Kadomtsev-Petviashvili equation in fluid dynamics and plasma physics. Phys. Scr. 2021, 96, 075212. [Google Scholar] [CrossRef]
- Fokou, M.; Kofane, T.C.; Mohamadou, A.; Yomba, E. Lump periodic wave, soliton periodic wave, and breather periodic wave solutions for third-order (2+1)-dimensional equation. Phys. Scr. 2021, 96, 055223. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Ramani, A.; Segur, H. A connection between nonlinear evolution equations and ordinary differential equations of P-type.I. J. Math. Phys. 1980, 21, 715. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
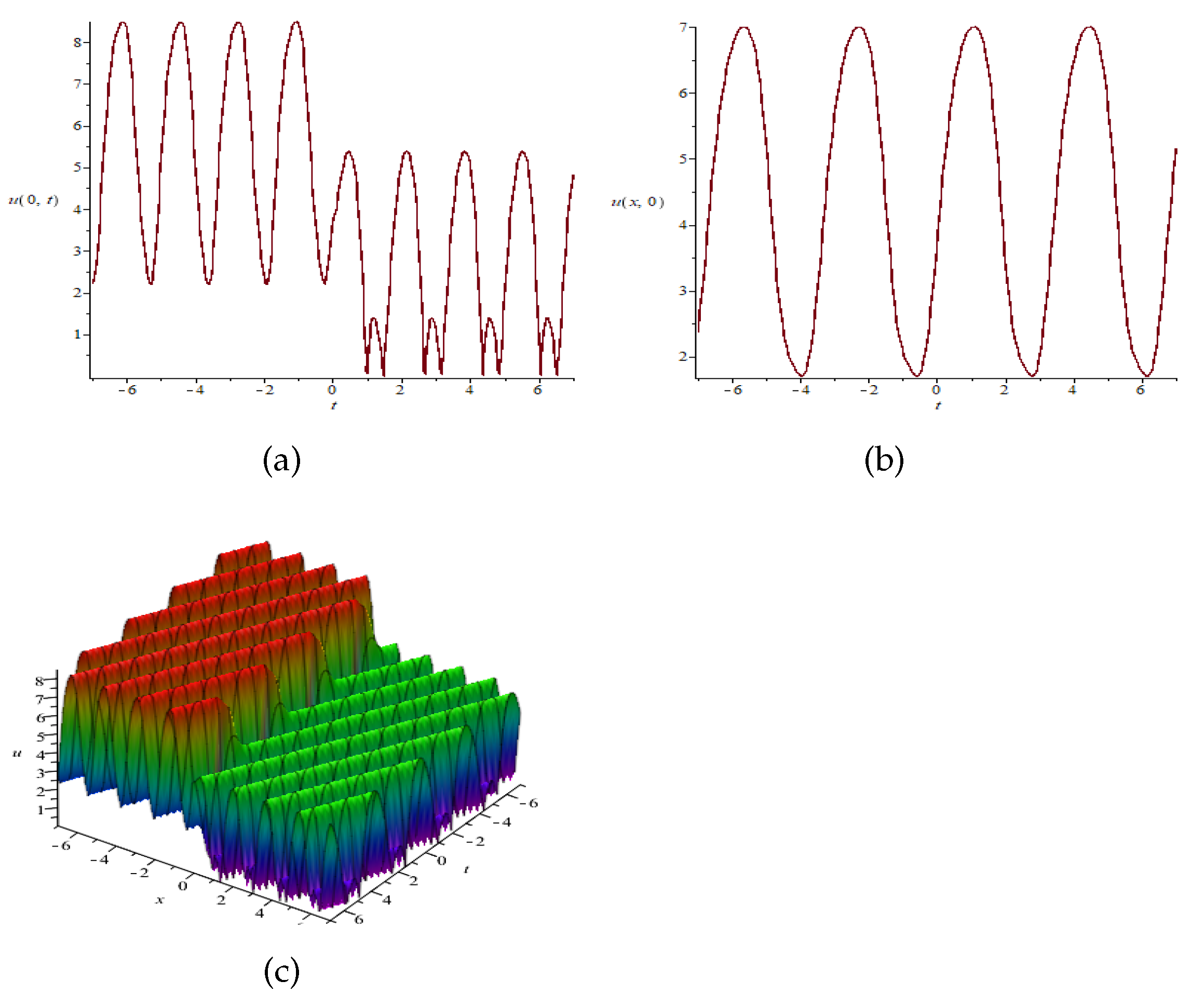
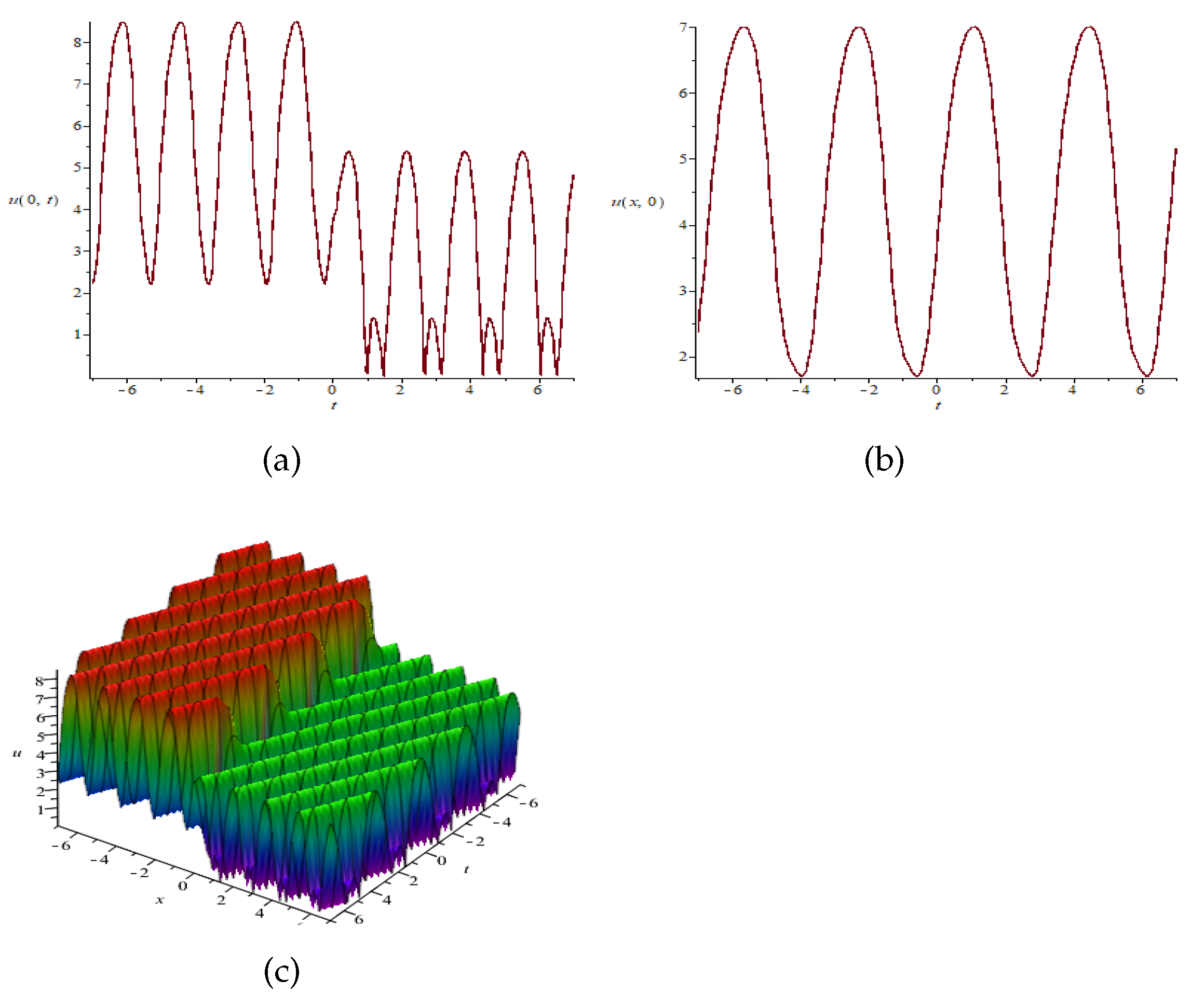
| x | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
|---|---|---|---|---|---|---|---|---|---|
| t | −7 | −6.2354 | −6 | −5.2777 | −4 | −3.5919 | −2.8640 | −2 | −1.9063 |
| u | 2.21334 | 8.33976 | 8.31707 | 2.21344 | 5.06270 | 2.21352 | 8.33954 | 2.38391 | 2.21331 |
| x | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t | −1.1783 | −1 | −0.2516 | 0.5049 | 1 | 1.2401 | 1.4742 | 2 | 2.1255 |
| u | 8.33943 | 8.45273 | 2.21235 | 5.35937 | 0.01779 | 1.3420 | 0.017117 | 5.07370 | 5.35921 |
| x | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t | 2.6881 | 2.9258 | 3 | 3.1599 | 3.8113 | 4 | 4.3715 | 4.5250 | 4.8492 |
| u | 0.01816 | 1.34208 | 1.10875 | 0.01761 | 5.35924 | 5.02672 | 0.01780 | 1.34188 | 0.01737 |
| x | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t | 5 | 5.4971 | 6 | 6.0573 | 6.3030 | 6.5315 | |||
| u | 1.82085 | 5.35929 | 0.98980 | 0.01704 | 1.33029 | 0.01664 |
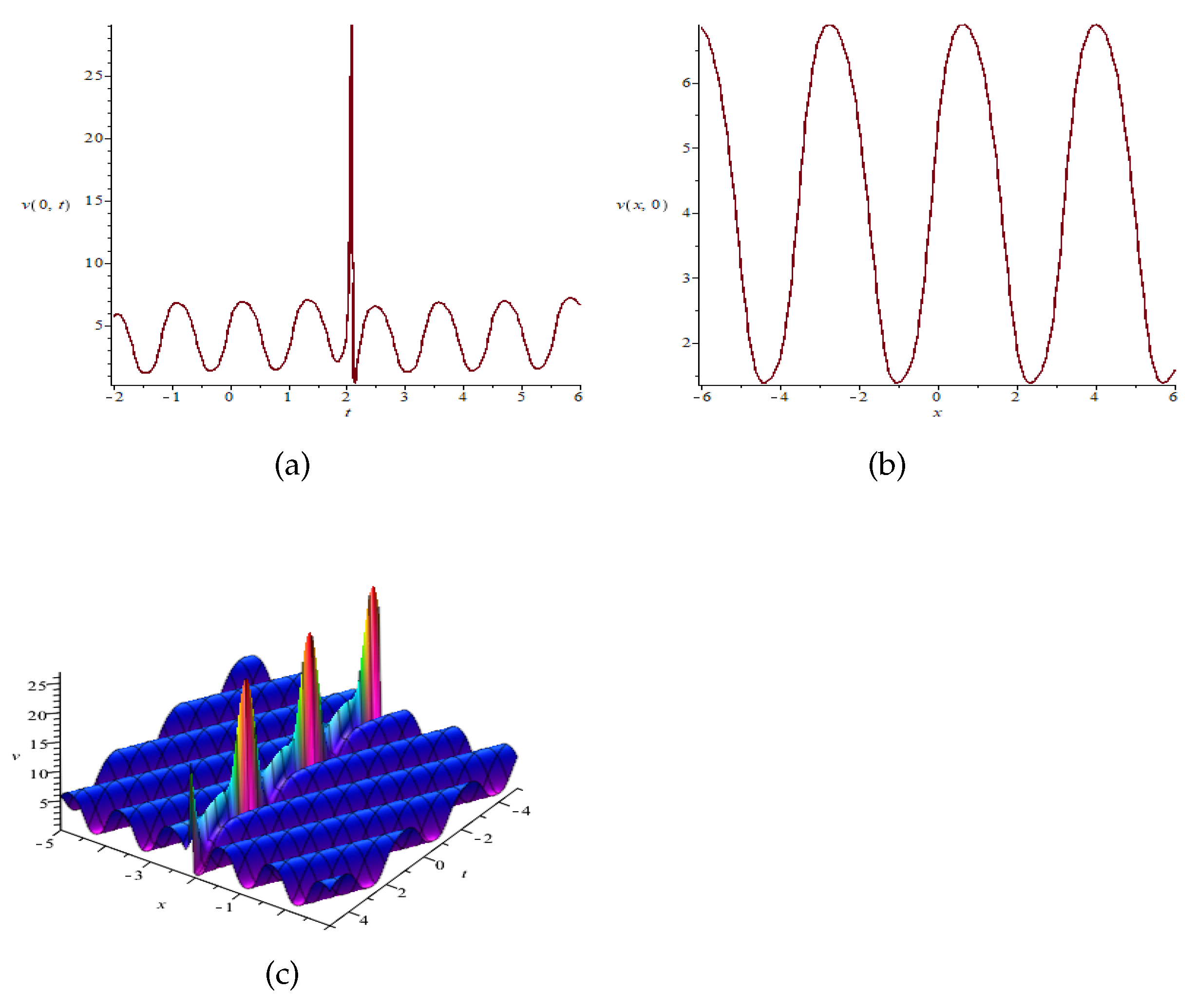
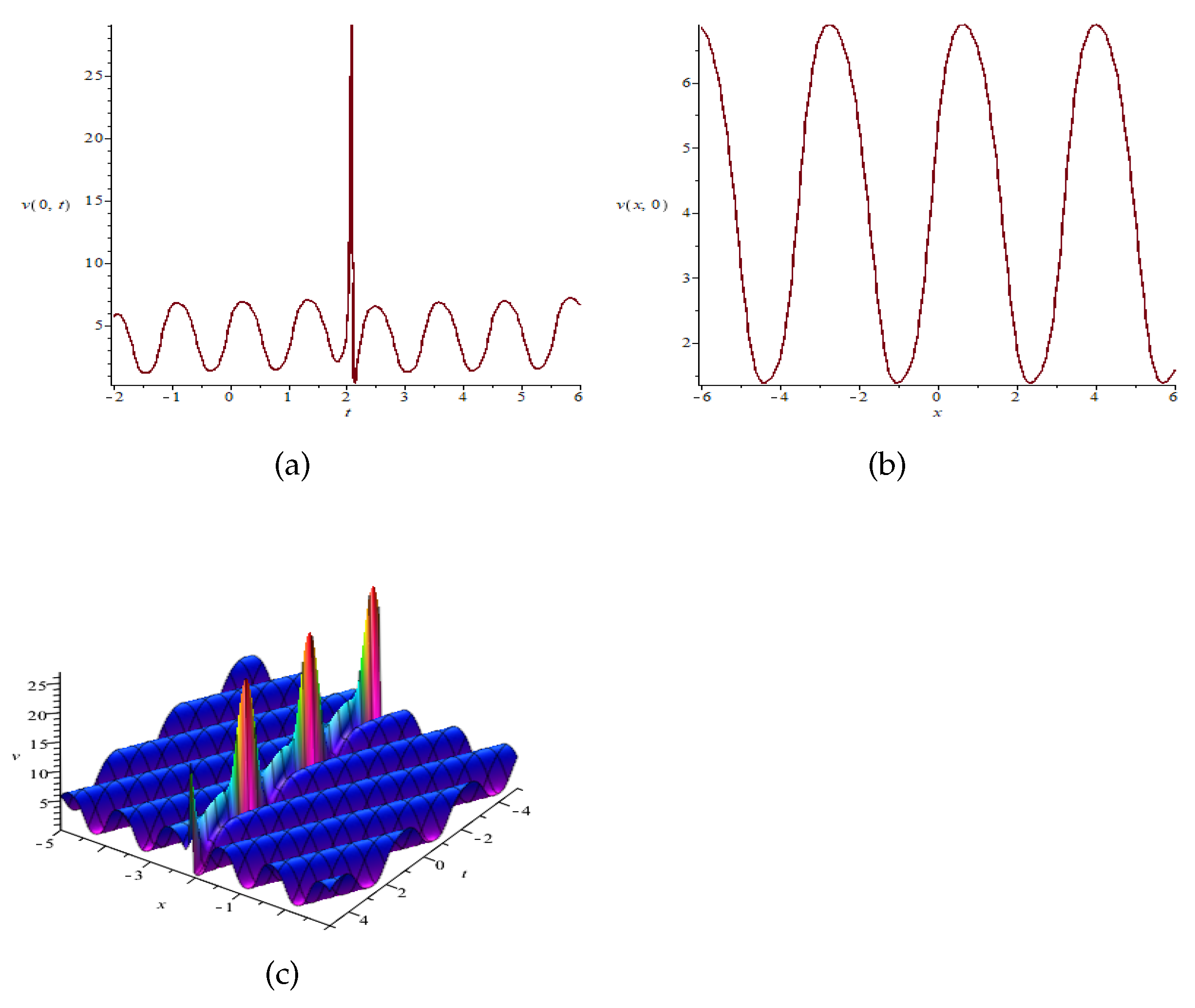
| x | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
|---|---|---|---|---|---|---|---|---|---|
| t | −2 | −2.0035 | −1.5320 | −1 | −0.9694 | −0.3412 | 0.3051 | 0.7705 | 1 |
| u | 5.59065 | 5.54969 | 1.35679 | 6.55527 | 6.69761 | 1.35605 | 6.69981 | 1.46356 | 2.96166 |
| x | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t | 1.2234 | 1.8534 | 2 | 2.0883 | 2.1418 | 2.4900 | 2.9770 | 3 | 3.6751 |
| u | 6.69693 | 2.09575 | 4.69652 | 29.07161 | 0.039392 | 6.53238 | 1.35676 | 1.28513 | 6.64508 |
| x | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| t | 4 | 4.1479 | 4.6155 | 5 | 5.2619 | 5.7031 | |||
| u | 2.45604 | 1.38254 | 6.69679 | 4.68181 | 1.50911 | 6.69698 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, Y.; Yao, R.; Xin, X.; Li, Y. Nonlocal Symmetry, Painlevé Integrable and Interaction Solutions for CKdV Equations. Symmetry 2021, 13, 1268. https://doi.org/10.3390/sym13071268
Xia Y, Yao R, Xin X, Li Y. Nonlocal Symmetry, Painlevé Integrable and Interaction Solutions for CKdV Equations. Symmetry. 2021; 13(7):1268. https://doi.org/10.3390/sym13071268
Chicago/Turabian StyleXia, Yarong, Ruoxia Yao, Xiangpeng Xin, and Yan Li. 2021. "Nonlocal Symmetry, Painlevé Integrable and Interaction Solutions for CKdV Equations" Symmetry 13, no. 7: 1268. https://doi.org/10.3390/sym13071268
APA StyleXia, Y., Yao, R., Xin, X., & Li, Y. (2021). Nonlocal Symmetry, Painlevé Integrable and Interaction Solutions for CKdV Equations. Symmetry, 13(7), 1268. https://doi.org/10.3390/sym13071268