1. Introduction
The Takagi–Sugeno (T-S) fuzzy model was put forward by T. Takagi and M. Sugeno [
1] in 1985, and they proposed a new type of fuzzy model representation. Due to the excellent approximation performance of the T-S fuzzy model in nonlinear systems, more and more scholars are interested in the T-S fuzzy model using multiple local linear systems to represent the nonlinear system and then analyzing the characteristics of the nonlinear system by using the analysis method of the linear system. In 1992, an important conclusion was proved by Wang [
2], that is, fuzzy systems are a universal approximator, and Wang approximated any continuous function on the compact set with any precision by using the fuzzy system constructed with gaussian membership functions, a product inference machine, and a center-average weighted defuzzifer. Since then, many scholars [
3,
4,
5,
6,
7] have proven that the above conclusions can be adapted to various fuzzy systems. In [
8], the finite-time stabilization of a class of stochastic nonlinear systems was studied by applying the fuzzy-logic systems to approximate the unknown nonlinearities and a novel adaptive finite-time control strategy was proposed. The vector integral sliding mode surface and sliding mode control (SMC) law were proposed for the T-S fuzzy singular system with matched external disturbances in [
9]. In recent years, a new fuzzy model has been proposed by K. Tanaka [
10], that is, a polynomial fuzzy model. In essence, it is a more extensive form of the T-S fuzzy model. The main difference between the two models is the conclusion: the result of T-S fuzzy model is a linear model, and the result of polynomial fuzzy model is a polynomial model. Therefore, the number of fuzzy rules in the polynomial fuzzy model is much less than that in the T-S fuzzy model when describing the same nonlinear systems. Hence, it will become more and more popular, and more and more people [
11,
12,
13] have begun to study the polynomial fuzzy system. In [
14,
15], the polynomial fuzzy singular system was proposed first and the interval observers for polynomial fuzzy singular systems were designed, in which the external disturbances and unknown parameters were included in the systems. However, Pang [
14,
15] assumed that the polynomial fuzzy singular systems is regular and impulse-free. In this paper, the SPFM can be obtained for the NSSs with the impulse by the SPFM approximation theorem and related algorithms given.
As the fuzzy modeling develops, polynomial fuzzy models employ polynomial models as local subsystems instead of linear models. It not only makes the modeling process simpler but also handles more nonlinear plant in comparison with the singular T-S fuzzy model. The LMI-based stability analysis method commonly used in T-S fuzzy model has some difficulties in the application of polynomial fuzzy models. Thus far, it has not been directly used in the stability analysis of polynomial model systems. Based on the difficulty of analyzing polynomial fuzzy models, the sum-of-squares based (SOSB) approaches emerges and occupies an important position in the polynomial fuzzy model, which can effectively deal with stability analysis problems [
10]. In [
10], the SOSB stability analysis of a polynomial fuzzy model is proposed under a parallel, distributed compensation strategy; hence, the fuzzy controller designed has the same membership function and fuzzy rules as the polynomial fuzzy model. In [
16], the stability of the polynomial-fuzzy-model-based (PFMB) control system was investigated by using the SOSB stability analysis method and by considering the number of fuzzy rules and the shape of premise fuzzy membership functions. In [
17,
18], the condition of system conservative stability was obtained based on the piecewise linear membership function and the polynomial approximation membership function.
The singular system is a natural representation of objective system. It can be used to describe further characteristics of the system and has been widely applied in large system theory, singular perturbed theory, circuit theory, and economic theory [
19,
20,
21,
22,
23]. In 1999, Taniguchi et al. combined the T-S fuzzy system with the singular system and promoted it to propose the T-S fuzzy singular system [
24]. In recent years, various novel control techniques have been applied to the fuzzy singular system [
25,
26,
27,
28,
29,
30]. In many practical models, most of the systems are nonlinear and the nonlinearity of many nonlinear systems can be transformed into polynomials. If the T-S fuzzy system is used to approximate the nonlinear system, there are two challenges, namely, the number of rules is too many and the approximation accuracy is insufficient. However, the birth of the SPFM approximation method can be able to solve such problems and to effectively reduce the number of fuzzy rules for the impulse-free nonlinear system. There are two main characteristics of SPFM: 1. The SPFM is a class of more complex system including dynamic and non-dynamic constraints. 2. The number of fuzzy rules of the SPFM for nonlinear system is less than the normal fuzzy model, and the results are more simple.
The T-S fuzzy singular system is used to approximate the NSS, but there may be two problems for complex NSS. One is too many rules for the T-S fuzzy singular system, and the other is that the approximation error is large. However, the SPFM is able to solve such problems, and the number of fuzzy rules can be reduced for the impulse-free NSS [
14,
15]. If the NSS has an impulse, there is no method to show that SPFM can effectively approach such systems. Reference [
31] deals with the existence of solutions to singular second-order differential equations with impulse effects and with the Dirichlet boundary conditions. However, the requirements of the thesis are very strict, and there are many assumptions. In [
32], Zhang and Yuan dealt with the existence and multiplicity of solutions for the nonlinear Dirichlet value problem with impulses by using the variational methods and critical points theory. In [
33], Nieto introduced the concept of a weak solution for a damped linear equation with Dirichlet boundary conditions and impulses. The above three papers dealt with impulse problems for second-order differential equations and did not give the case of higher-order differential equations. In [
34,
35], this technical note discusses to what extent the high-order sliding mode control may serve as an alternative to the conventional sliding mode control. The definitions of sliding mode order, relative degree, chattering attenuation, filtering, and implementation complexity constitute the scope of that discussion. In [
36], Utkin systematically introduced the development of the theory of sliding modes, the design of sliding mode controller, and the application of sliding mode control. In this paper, a theorem using the SPFM to approximate the nonlinear singular system with impulses was proven for any order and the assumptions were easier to satisfy. Our major research interest is to study the SPFM approach problem for a class of NSS with impulses. The main contributions of this paper are summarized below.
- (1)
The method using SPFM to approximate the impulse-free nonlinear singular system is basically the same as the T-S fuzzy model, and there are many related studies. One of the important differences between singular systems and normal systems is that the former may contain impulse terms in the solution. Hence, the impulses are a distinctive feature of singular systems, and they are the basis on which singular systems can describe a wider range of physical systems. Current research on singular systems often ignores the impulses or assumes that the system is impulse-free and that there is no method to approximate the singular system with an impulse by using SPFM. The theorem that the SPFM can approximate an NSS with impulses with an arbitrary precision is proven.
- (2)
According to the complexity of the NSS, it is divided into a nonlinear model with a compound function type and a simple function type. For two different types of NSS, two different theorems are given to prove the effectiveness of SPFM. It is fully proven that the NSS can be approximated using the SPFM model, even if the NSS has impulses. Then, the algorithms solving SPFM for two kinds of nonlinear functions are given.
- (3)
The principle of SMC to eliminate the impulse is given. The designed SMC law not only can effectively eliminate impulses of SPFM but also can make the systems asymptotically stable.
The organizational structure of the paper is as follows. The descriptions of the approximation of SPFM are considered in
Section 2. Two numerical examples of different types about NSSs and the corresponding algorithms for solving the SPEM for the NSS with (and without) impulses are given in
Section 3. Then, the linear switching function and SMC law are designed, and two important theorems in SMC are proven. Finally, the theorem that the impulse of the SPFM can be eliminated by the SMC law is proven and the principle of SMC to eliminate the impulse is given. In
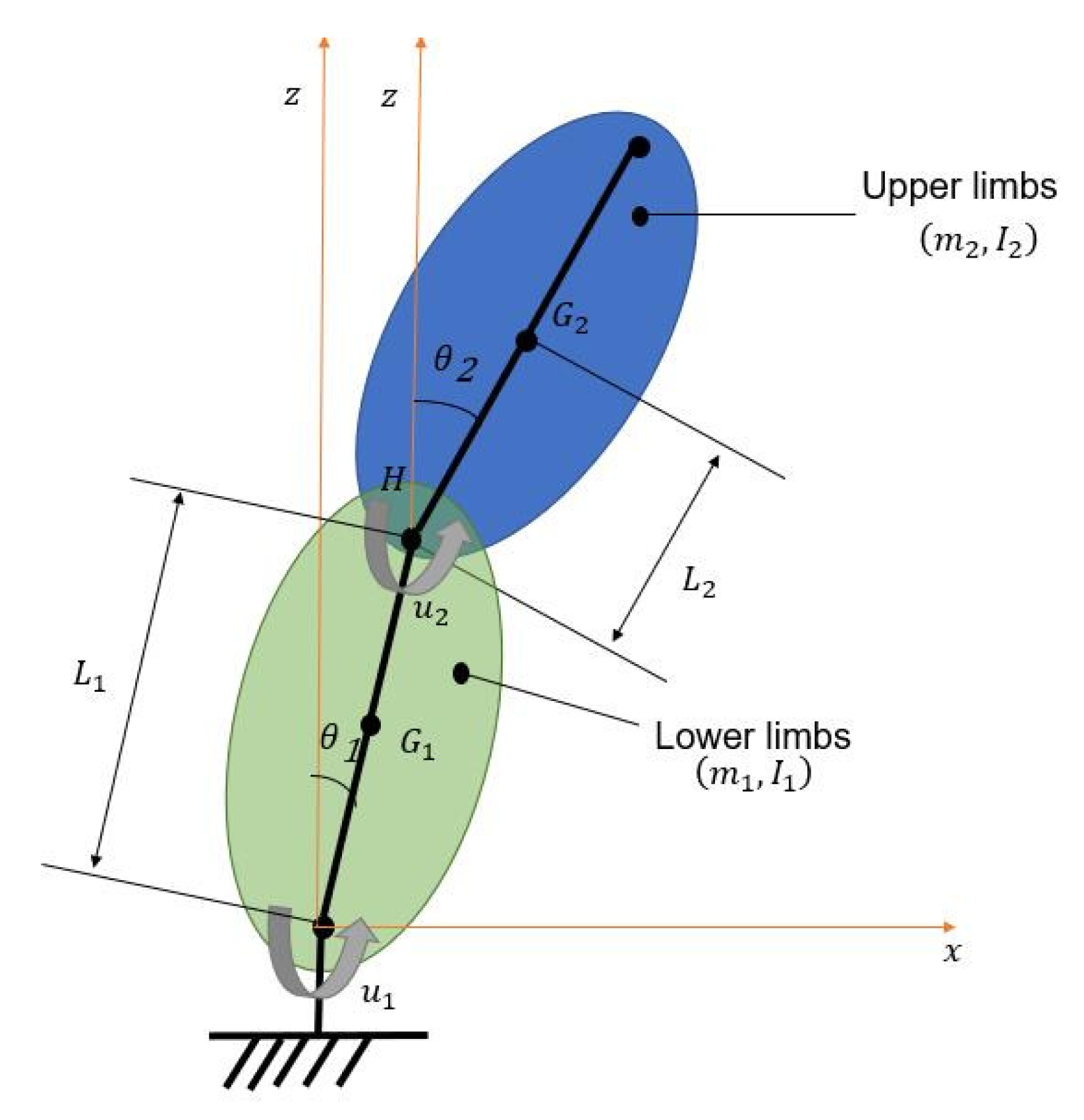
Section 4, a human posture inverted pendulum model and two numerical example are presented to demonstrate the effectiveness of our theoretical results.
Section 5 concludes the paper.
Notation: The symbol denotes the transposition of vector or matrix A; the symbol represents the n-dimensional vector space; represents Euclidean norm; represents supremum function; represents dimensional zero matrix; and the symbol ∗ represents entries.
2. Preliminaries and Problem Formulation
In this paper, we use the SPFM to approximate NSSs with (or without) impulses with any precision. Based on the sector nonlinearity concept, the singular polynomial fuzzy system can be represented.
Model Rules i:
where
is the state vector,
is the input vector, and
is the fuzzy set of the rule i corresponding to the premise variable
.
is a matrix,
,
, and
are the polynomial matrices about
. The term
is a monomial about
, and each monomial is a function of form
, where
are integers,
. Thus,
is a polynomial vector.
As the fuzzy model develops, polynomial fuzzy models employ polynomial models as local subsystems, and polynomial fuzzy models is a more general case of T-S models. According to model rules and process of T-S model, the SPFM can be represented as
where
and
So
Remark 1. The SPFM is the more extensive form of the T-S fuzzy singular system. If and are constant matrices ( and ) and , then becomes and it is the part of the T-S fuzzy singular system.
The SPFM approximation method has an important advantage that the number of fuzzy rules in a singular polynomial fuzzy system is generally fewer than the T-S fuzzy singular system.
Assumption 1. In this paper, we assume that if and only if .
Remark 2. Assumption 1 is mainly to ensure that the system is a polynomial about and that the constant term is 0. This is an important premise of polynomial systems, and many results have related assumptions [37]. The NSS is given as follows:
where
is a n-dimensional vector function consisting of continuous function
and
.
Let
P and
Q be invertible matrices and
. Let
, where
, the Equation (
2) is equivalent to the following equation:
The research interest of this paper is to find the SPFM to approximate the NSS such as Equations (
2) or (
3).
Definition 1 (singularity induced bifurcations (SIB) [
38])
. Consider the systemSuppose that the system has an equilibrium for and that the linearization about this equilibrium has an eigenvalue locus . If for some sequences , such that for and we have and , and
- (I)
for and
- (II)
,
then is said to be a SIB point.
Remark 3. In theory, the fuzzy system can be used to approximate the nonlinear system with arbitrary accuracy. However, the approximation accuracy of most specific nonlinear singular systems needs to be explained from a numerical perspective by using SPFM, especially for nonlinear singular systems with impulses. In order to verify the effect of model approximation, the error between the numerical solution of SPFM and the state response of the nonlinear singular system is mainly used.
In this research, the NSS can be divided into two types: one is a nonlinear model with a compound function type such as , , and and the other is a nonlinear model with a simple function type such as , , and . The methods of finding the SPFM for two kinds of nonlinear singular systems are different. For the nonlinear model with a compound function type, the methods of finding SPFM are the variable transformation and we introduce the variable transformation of the six basic compound functions. In view of these two nonlinear systems, two examples are given later.
2.1. Variable Transformation for Basic Compound Function
At this section, the variable transformation methods of the six basic compound functions are given. The six basic compound functions are the fractional function, the power function, the exponential function, the logarithmic function, the trigonometric function, and the hyperbolic function. Any complex functions can be composed of these six basic functions using the basic operations, such as addition, subtraction, multiplication, division, and compound operations. Therefore, we only give the variable transformation methods of six basic functions.
In the
Table 1, for convenience, we employ
x instead of
. The
.
are constant,
is any real constant, and
is a positive. The trigonometric function contains
,
,
,
,
, and
and takes
as an example; the other computing methods are similar. The hyperbolic function contains
,
,
, and
and takes
as an example; the other computing methods are similar.
.
2.2. Nonlinear Model Example with Compound Function Type
Consider the NSS as follows
It is well known that a non-polynomial system can be transformed into a polynomial system by variable transformation. For system (
4), we introduce two new variables:
and
. By the variable transformation, we have
Therefore, system (
4) can be converted into a polynomial NSS as follows:
Then, we can obtain the SPFM:
where
As the number of nonpolynomial terms of system (
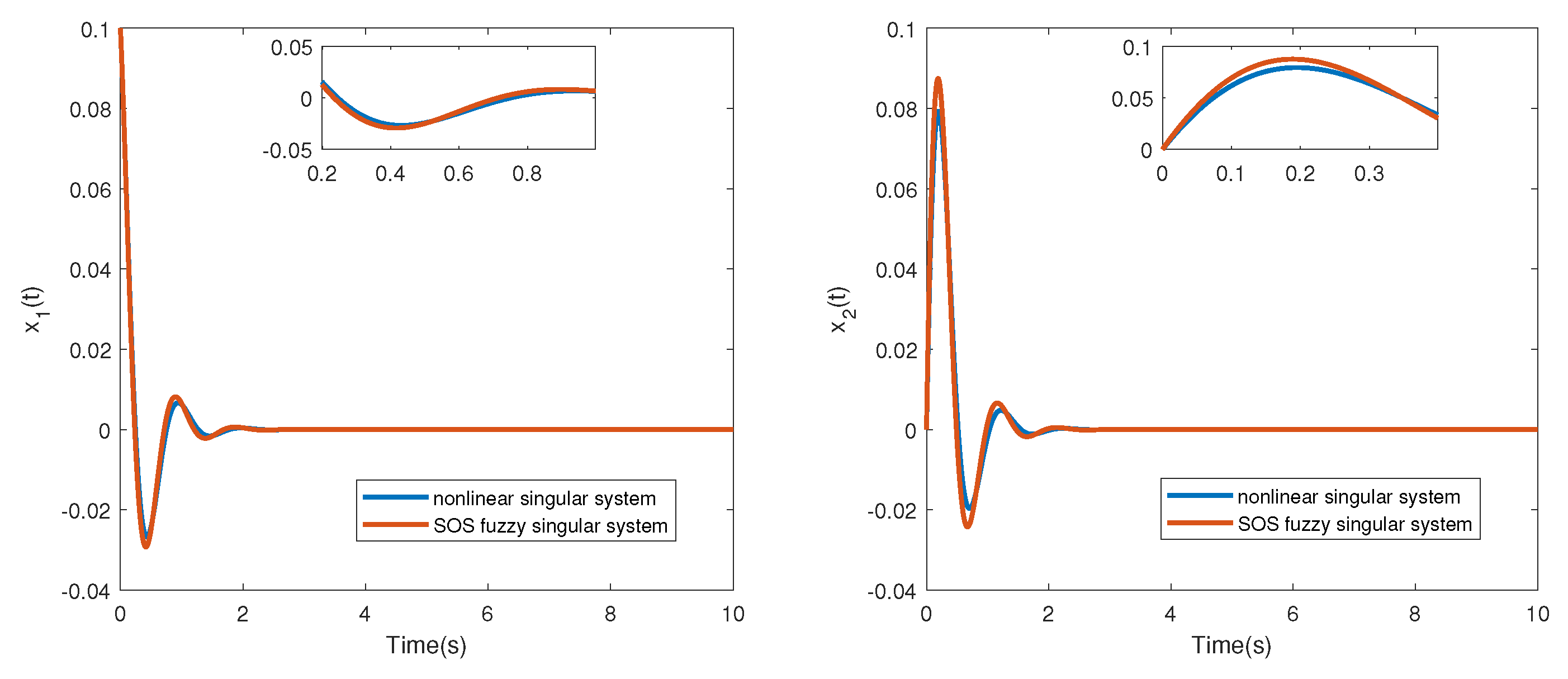
4) is less, the SPFM has only one subsystem. The
Figure 1 shows a comparison of the state trajectory about the NSS (
4) and SPFM (
6) when
.
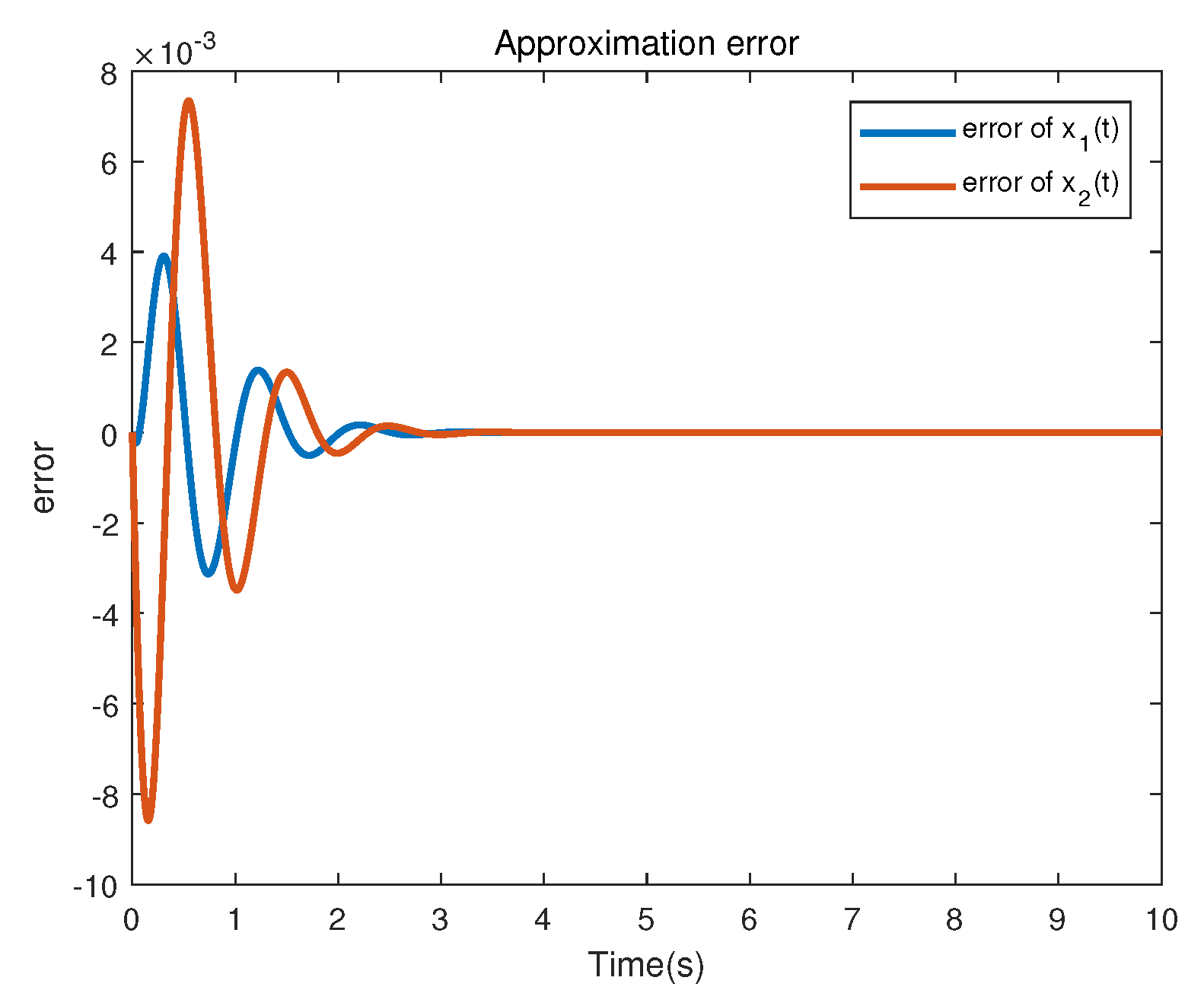
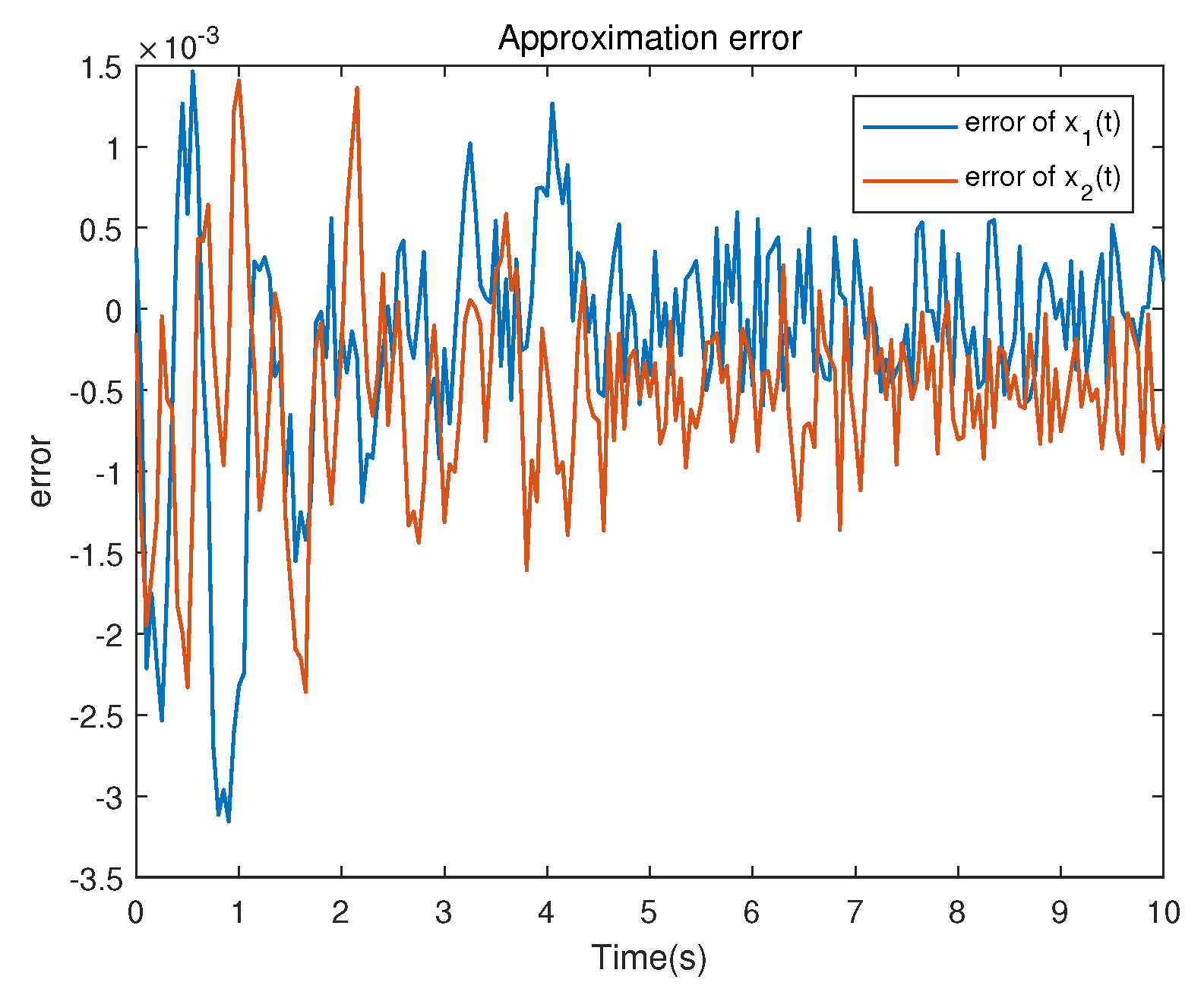
The error figure between two states
and
is given in
Figure 1 and
Figure 2. The comparison of state trajectory between NSS and SPFM is given by
Figure 1, and the error of
and
is given by
Figure 2. As shown in
Figure 1 and
Figure 2, the SPFM (
6) can reasonably approximate the NSS (
4).
2.3. Nonlinear Model Example with Simple Function Type
Consider the NSS as follows
System (
7) can be expressed as
where
.
The steps that construct a SPFM to represent the system are given. To begin with, we let and it is known that for all t.
The rules of SPFM can be given.
Model Rule 2:
where
and
, so
The SPFM is
where
,
,
,
.
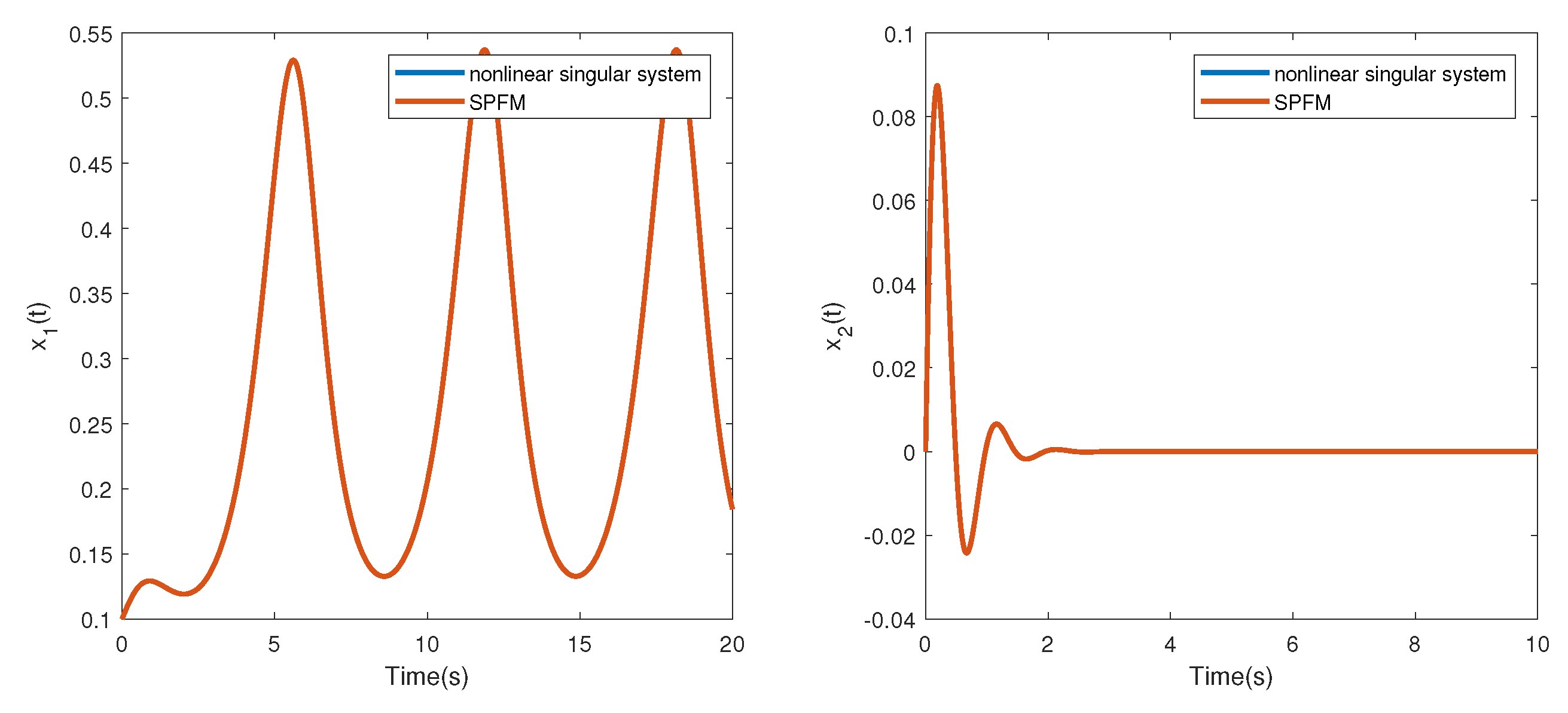
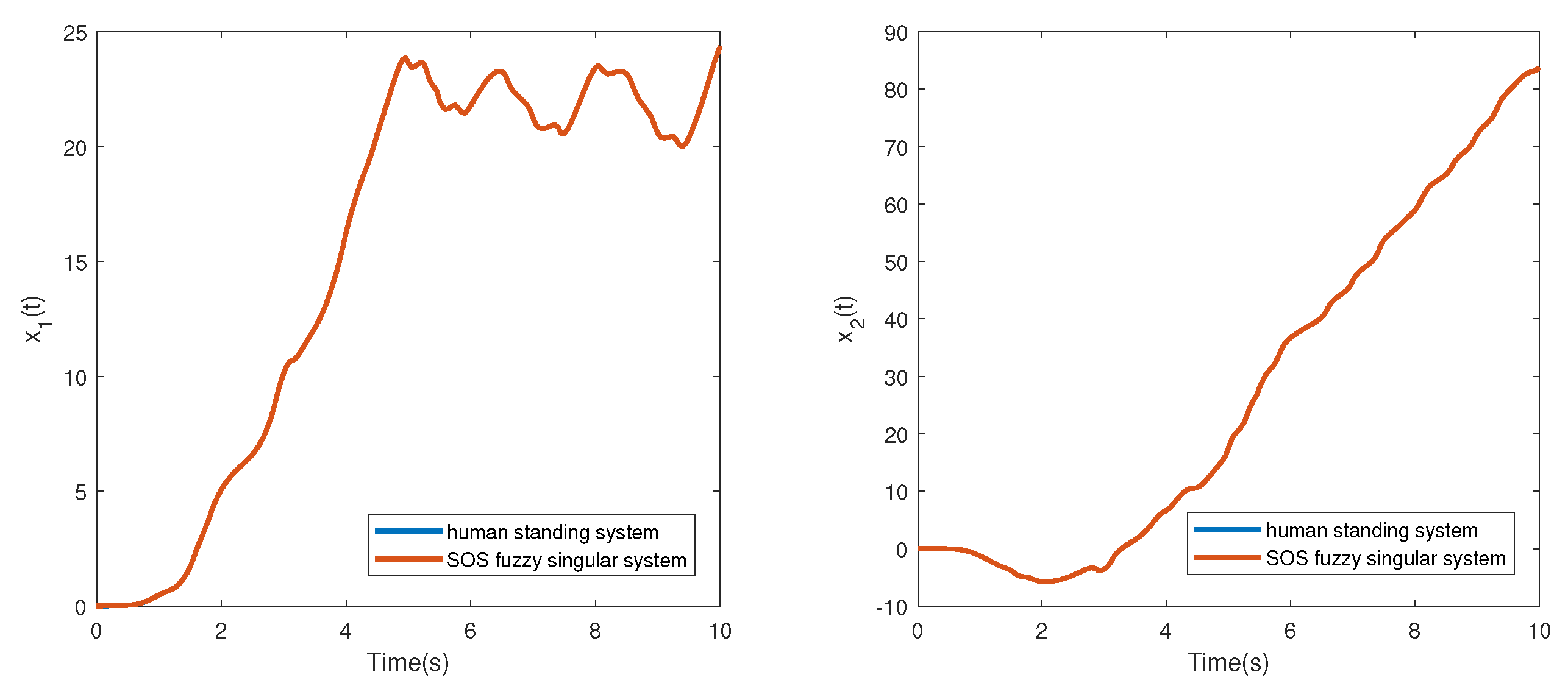
A contrast figure (see
Figure 3) of the state responses of the NSS (
7) and the SPFM (
9) is given below when
.
As the state of the two systems is completely overlapped, the SPFM (
9) can effectively approximate the NSS (
7).
Remark 4. In this paper, we use two methods to solve the SPFM of the NSS, and the two methods have their own advantages and disadvantages. For the method in Section 3.2, the advantage is that the number of fuzzy rules is relatively small and the disadvantage is that the dimension of SPFM is increased; the method in Section 3.3 is just the opposite. 3. Main Results
In this section, the theorem of the SPFM that can effectively approach the model is proven for the nonlinear singular system with impulses. It is proven that a class of nonlinear singular system with a bounded impulse-free item property and a separable impulse item property can be approximated by SPFM with arbitrary accuracy. The linear switching function and sliding mode control law are designed to be applied to the impulse elimination of the SPFM.
3.1. The SPFM Approximation Theorem without Impulse
Before giving the approximation theorem, some necessary symbols are given:
is compact, set and
is the set of continuous function on the
U, that is
is the real continuous function set on set
U:
is the solution set:
Lemma 1 ([
39])
. Ω
is a bounded closed set on . Theorem 1. The vector space is a compact set, where the length of vector is expressed in Euclidean distance and V is the set consisting of and of system (2). Proof. There are two main aspects to be proven: 1. V is a distance space. 2. Any sequence of V has a subsequence converging to V. First, prove the first part.
For any n-dimensional vector , , , , where , and are constants.
Through the above analysis, V is a distance space. Next, we prove that any sequence of V has a subsequence converging to V. For the above . It is apparent that there exists a subsequence that satisfies , where . That is, any sequence of V has a subsequence converging to V. Therefore, the vector space is a compact set. □
Definition 2. The distance between two functions on is It is easy to prove that satisfies nonnegativity, symmetry and triangle inequality, so the is a metric space. The whole space of the polynomial fuzzy systems is denoted as on a compact set U.
Lemma 2 ([
3])
. Consider any real continuous function g on the compact set and any precision ; there exists that satisfies . In this paper, we discuss the approximation ability of SPFM without impulses. Let be any real continuous function of NSS on set ,
Lemma 3. For the above and any precision , there exists that satisfies .
Proof. Specific proof see literature [
39]. □
Remark 5. In the literature [39], the theorem using the T-S fuzzy singular system to approximate the NSS without impulses has been proven. There are some similarities between our proof process and that in the literature, but the biggest difference is that our results are part of a polynomial model and that our theorem is more general. 3.2. The SPFM Approximation Theorem with Impulse
In this section, we mainly prove the approximation problems for a class of singularity-induced bifurcations system using SPFM. First, a general description of the problem is given:
The value of bifurcation is
, and system (
10) is SIB system at
. The following useful definitions are given below.
Definition 3 (bounded impulse-free item)
. Consider system (10) at ; the NSS appears impulse and the number of impulse-free items is . If this impulse are bounded, the NSS is called BIFI. Definition 4 (separable impulse item)
. Consider system (10) at ; the singular system appears impulse and can be written:Consider each impulse item ; if there is not an impulse item in the matrix , the NSS is called SII. Theorem 2. For the SIB system (10) at , if the system is BIFI and SII; the system can be approximated by SPFM. Proof. System (
10) is BIFI and SII; without loss of generality, assume that the number of impulse items is one
and that the impulse item is called
. Therefore, we assumed that the number of nonlinear terms without impulse item except for polynomials is
k; that the nonlinear terms are called
; and that the maximum and minimum are
and
, respectively.
The general scheme of finding the SPFM is given:
When
, system (
10) can be written:
Defining that
represents the nonlinear terms, therefore,
Calculating the minimum and maximum values of under , the minimum and maximum of are and .
Calculating the membership functions, based on step 3, we have
where
and
. Hence, the membership functions can be written as
Obtain the fuzzy rules of model. For , we have
Model Rule i2:
where
,
,
, and
can be given using
and
to replace
in
and
, respectively.
Calculate the T-S fuzzy singular system.
where
□
The proof of Theorem 2 provides a scheme to solve the SPFM for a class of NSSs with an impulse which is BIFI and SII.
3.3. The Algorithms of SPFM Approximation
Consider the two types of NSSs; the algorithms of SPFM approximation are given.
- 1.
The Algorithm 1 for a nonlinear model with a compound function type
For NSSs (
2), the nonlinear function
contains some compound function so the compound function must be considered. The algorithm is as follows.
| Algorithm 1 The SPFM approximation with a compound function type |
- Step 1:
The variable transformation. Without loss of generality, assume that the number of compound function of system ( 2) is one and that the compound function is called . Introducing a new variable , and if , then , where a and are constants. - Step 2:
Derivative. Calculating the derivative of new variables and (if any), we have
- Step 3:
Transformation. Replacing the compound function of , , and (if any) with the new variable, we have
- Step 4:
Obtain the SPFM. Combining Equations ( 13) and ( 14) and writing it in matrix form, we have
where .
|
According to the Algorithm 1, the SPFM of NSS can be obtained and the SPFM has only one subsystem.
- 2.
The Algorithm 2 for a nonlinear model with a simple function type
For NSSs (
2), the nonlinear function
does not contain the compound function, so the SPFM approximation of this system is very similar to the T-S fuzzy approximation. However, there is only one difference, which is that the SPFM does not consider the nonlinear polynomials term. This is also an advantage of the SPFM. The algorithm of the SPFM for nonlinear model with simple function type is given.
| Algorithm 2 The SPFM approximation with a simple function type |
- Step 1:
System ( 3) can be written as
- Step 2:
Consider the nonlinear terms of matrix and by defining that denotes the nonlinear terms. Therefore,
- Step 3:
Calculating the minimum and maximum values of under , the maximum and minimum of are and . - Step 4:
Calculating the membership functions, based on the Step 3, we have
where
and . Therefore, the membership functions can be represented as
- Step 5:
Obtain the fuzzy rules of model. For , we have Model Rule i2:
where , , , and can be given by using and to replace in and , respectively. - Step 6:
Calculate the SPFM.
where
|
The system does not have the compound function, and the nonlinear terms are bounded except for the polynomials. Without loss of generality, we assume that the number of nonlinear terms except for polynomials is k; the nonlinear terms are called , and the minimum and maximum are and , respectively.
Remark 6. In general, the singular system can be transformed into a normal system by solving the algebraic constraints, and then, it approaches the normal system via SPFM. However, there is one problem with this method. If the algebraic constraints are too complicated, the new variables and the number of fuzzy rules increase and the SPFM becomes more complex. Therefore, we deal with the singular system directly.
3.4. Design of the Sliding Surface and the SMC Law
In this subsection, we use a state feedback sliding mode control law to eliminate the impulse of SPFM. For system (
1) with an impulse, we design the linear switching function as
where
is constant matrix and needs to be designed such that
for any
.
Therefore,
where
,
.
Let
; then, the equivalent control law can be obtained:
Substitute Equation (
21) with Equation (
1); the sliding mode motion is then
Consider the following SMC law
where
k and
are positive real numbers.
Therefore, the closed-loop control system can be expressed as
Remark 7. The initial condition incompatibility and input discontinuity are two reasons for the existence of impulses in the singular system. However, the initial conditions are all compatible, and the input consists of continuous and discontinuous in this paper. Next, we analyze how to eliminate the impulse by SMC and give relevant proof in the following subsection. The control input is divided into two parts:where and represent a continuous part and a discontinuous part of the input, respectively. When , the control input is discontinuous, but the control input to system (1) is able to reach the sliding surface before the impulse occurs. If the system reaches the sliding surface, then and the trajectory of the SPFM transitions from the normal motion phase to the sliding mode phase. Additionally, the controller is continuous; therefore the impulse of the SPFM (1) can be eliminated by the SMC law (23). Theorem 3. For the closed-loop control system (24), the sliding surface (21) converges to zero in finite time. Proof. The Lyapunov function candidate is chosen as
In fact
Therefore, the switching function
converges to zero in finite time. The proof is completed. □
3.5. Stability Analysis of the Sliding Motion
In the Theorem 3, the sliding surface has been proven, which converges to zero in finite time. In this subsection, the stability analysis of the sliding motion is given.
Theorem 4. The closed-loop control system (24) is asymptotically stable if and only if there exist a nonsingular matrix , two full column rank matrices , and a matrix such that, for any ,where . Proof. According to the [
40], the Equation (
29) is equivalent to the following equation: there exists a nonsingular matrix
P such that
The Lyapunov function candidate is chosen as
because
where
and
. Bases on Theorem 3, it is known that the switching function
converges to zero in finite time. Then,
Therefore, the closed-loop control system (
24) is asymptotically stable. The proof is completed. □
3.6. Impulse Elimination via SMC
In Theorem 4, it has been proven that the closed-loop control system (
24) is asymptotically stable when (
30) is satisfied. In this subsection, the closed-loop control system (
14) is impulse-free. In other words, the impulse of SPFM (
1) can be eliminated by the SMC law (
23).
Theorem 5. The closed-loop control system (24) is impulse-free if and only if there exists a nonsingular matrix such that, for any , Proof. As
, there exist two nonsingular matrices
and
such that
Let
It is obvious that matrix
is nonsingular; therefore, the conditions
,
, and
are satisfied according to the (
32), (
34), and (
35) for any
. We can know
because
P is symmetric and
. The left of the inequality (
33) is multiplied by
, and the right is multiplied by
, so
According to the (
37), the matrix
is nonsingular for any
, so the closed-loop control system (
24) is impulse-free. The proof is completed. □
Theorem 6. The SMC law is able to the SPFM (1) to reach the sliding surface before the impulse occurs, when the initial value of the switching function , where indicates the moment when the system (2) first appears as an impulse. Proof. Without loss of generality,
denotes the moment when the SPFM (
1) first appears as an impulse, that is
where
and
. When
Therefore,
and
The solution of Equation (
40) is divided into the following two cases.
Case 1: When , .
Case 2: When
,
where
represents the initial value of the switching function.
As a result of the initial value of the switching function
, Case 2 does not hold. In summary,
and
satisfy the following conditions
Based on the theory of SMC, system (
1) reaches the sliding surface at time
, that is, the SMC law
enables system (
1) to reach the sliding surface before an impulse occurs. The proof is completed. □
Remark 8. Compared with the existing design methods for eliminating the impulse, the controller designed in this paper has the following advantage: it can not only eliminate the impulse of the SPFM but also make the system asymptotically stable.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}