1. Introduction
Auxetic materials and metamaterials are of technical and theoretical importance, with a spectrum of potential and realised applications [
1,
2,
3,
4,
5,
6], and they play a pivotal role in the theoretical explanation of rigidity and mobility in periodic systems [
7,
8]. This is a rapidly growing area of research; for example, if we limit our attention to those proposed metamaterials that are auxetic, the review [
1] cites over 270 references relevant to this sub-field. An
auxetic structure is defined by the initially surprising property of expanding along one direction when stretched along a perpendicular direction [
9,
10]. There is a considerable literature of experimental, theoretical and modelling work on such structures, e.g., [
11,
12,
13,
14,
15]. One interesting subset of auxetics consists of those that have symmetric behaviour:
equiauxetic structures have a Poisson’s ratio of
. Thus, they display the auxetic property for all directions of stretch [
16].
A symmetry treatment of mobility in periodic structures [
17] has been adapted for the detection of equiauxetic behaviour [
16] and applied to an extensive catalogue of 2D bar-and-joint frameworks in which rigid bars along polygon edges
pivot freely at mutual joints [
18]. This symmetry criterion has also been used to study equiauxetic mechanisms in
hinged tilings: structures where the polygonal tiles of a tessellation of the plane are treated as rigid bodies connected by one, or sometimes more, pin-jointed bars per tile–tile edge contact. The three
regular tilings of the plane by hexagons, squares and triangles have been studied in this context [
19], yielding insight on the extent to which mobility properties of periodic systems can be deduced from finite physical models.
Many tiling-like patterns appear in structural chemistry, and many chemical realisations have been investigated because of the interest in 2D layer materials inspired by the discovery of graphene [
20]. Layer materials now have their own journals, e.g., FlatChem, 2D Materials, and 2D Materials and Applications, and the properties of these materials are attracting interest from both theoreticians and experimentalists. One Archimedean tiling made up of carbon atoms appears in the 2D projection of the hypothetical auxetic carbon allotrope, pentagraphene [
21,
22], and another in the putative superconductor, T-graphene [
23]. Some biomaterials can also be modelled as tilings: the regular square tiling appears in an auxetic layer material constructed from self-assembled pin-jointed aldolase tetramers [
24]. Other constructions based on tilings connected by hinges have attracted interest in the mathematical literature [
25]. Modifications of hinge tilings and lattices in practical application are also of current interest [
26,
27,
28].
Here we investigate the extension of the symmetry treatment of equiauxeticity to
Archimedean tilings, which are defined as vertex-transitive, edge-to-edge tilings of the plane with at least two types of regular polygonal tile. Some authors [
29] use the term Archimedean inclusively to cover both semi-regular and regular tilings, but here we restrict its use to the non-regular cases. Our tilings are hinged, and in the first case of interest, they have a single link (pin-jointed bar) for each edge of the closed tiling, with one end pinned to each of the rigid contacting tiles, arranged with a consistent sense of rotation for all tiles. Eight such single-link
hinged Archimedean tilings exist, of which one has mirror-image forms in 2D. Bar lengths are taken to be generic up to symmetry, i.e., equal for symmetrically equivalent edges but otherwise arbitrary. Established symmetry techniques, with extensions to deal with non-transitivity of edges and dependence of mobility counts on unit-cell size, turn out to be informative for these non-regular tilings.
In the earlier work on hinged
regular tilings [
19], both double- and single-link tilings were studied. Double-link connection with equivalent bars imposes an additional condition, in that the edges of neighbouring polygons must remain parallel. Regular tilings are edge-transitive, and the parallel constraint is therefore guaranteed for a totally symmetric expansion. However, of the Archimedean tilings, only the Kagome lattice is edge-transitive. As shown below, results for the mobility of these double-link hinged Archimedean tilings are obtained by minor modification of the character-table calculation for the single-link structure.
Finally, we note that finite analogues of the hinged tilings, the hinged expanding polyhedra (or expandohedra), have been studied in a symmetry context as models for deployable structures that occur in nature and engineering [
30,
31]. Structures such as cowpea chlorotic mottle virus and dengue virus, respectively, are known to undergo conformational transitions under the influence of changes in pH [
32] and temperature [
33]. Hinging of rigid subunits gives models for transitions of both types.
3. Single-Link Hinged Tilings
For single-link hinged tilings, the mobility count is given by the trace of (
3) under the identity operation, i.e.,
as
n counts the bodies (tiles), one bar is associated with each of the
b edges in the unit cell, and the characters of sets of in-plane translations and rotations are, respectively,
and
. In the single-link case, the site symmetry of the hinge constraint is that of an edge in the original tiling, subject to the exclusion of any improper symmetry, and is either
or the trivial
.
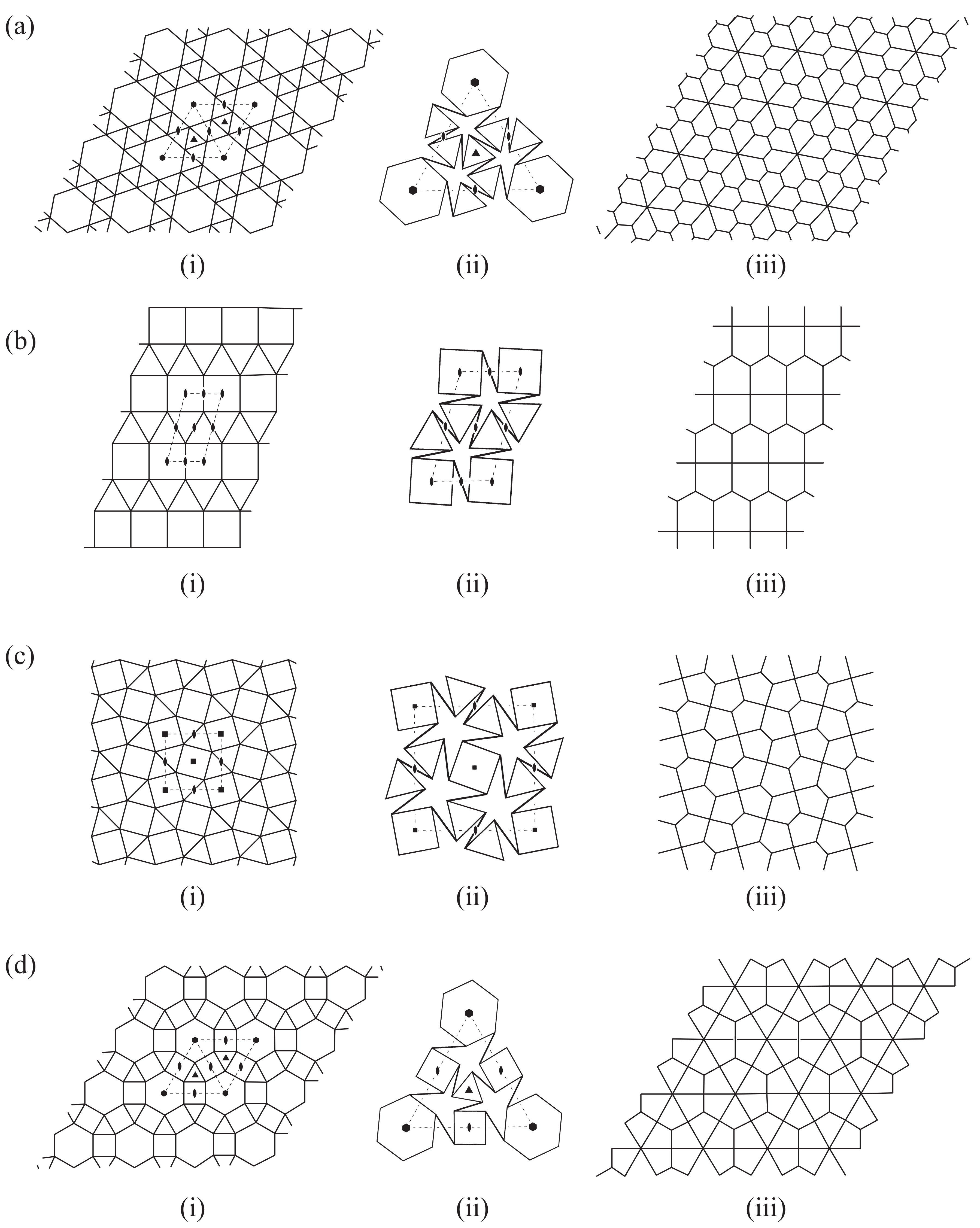
3.1. Calculations
Calculations of the mobility representation
using Equation (
3) are now shown for the eight single-linked Archimedean tilings. In each case, the calculation is carried out for a
array of copies of the basic unit cell indicated in
Figure 1. The steps in the calculation are shown in
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7,
Table 8 and
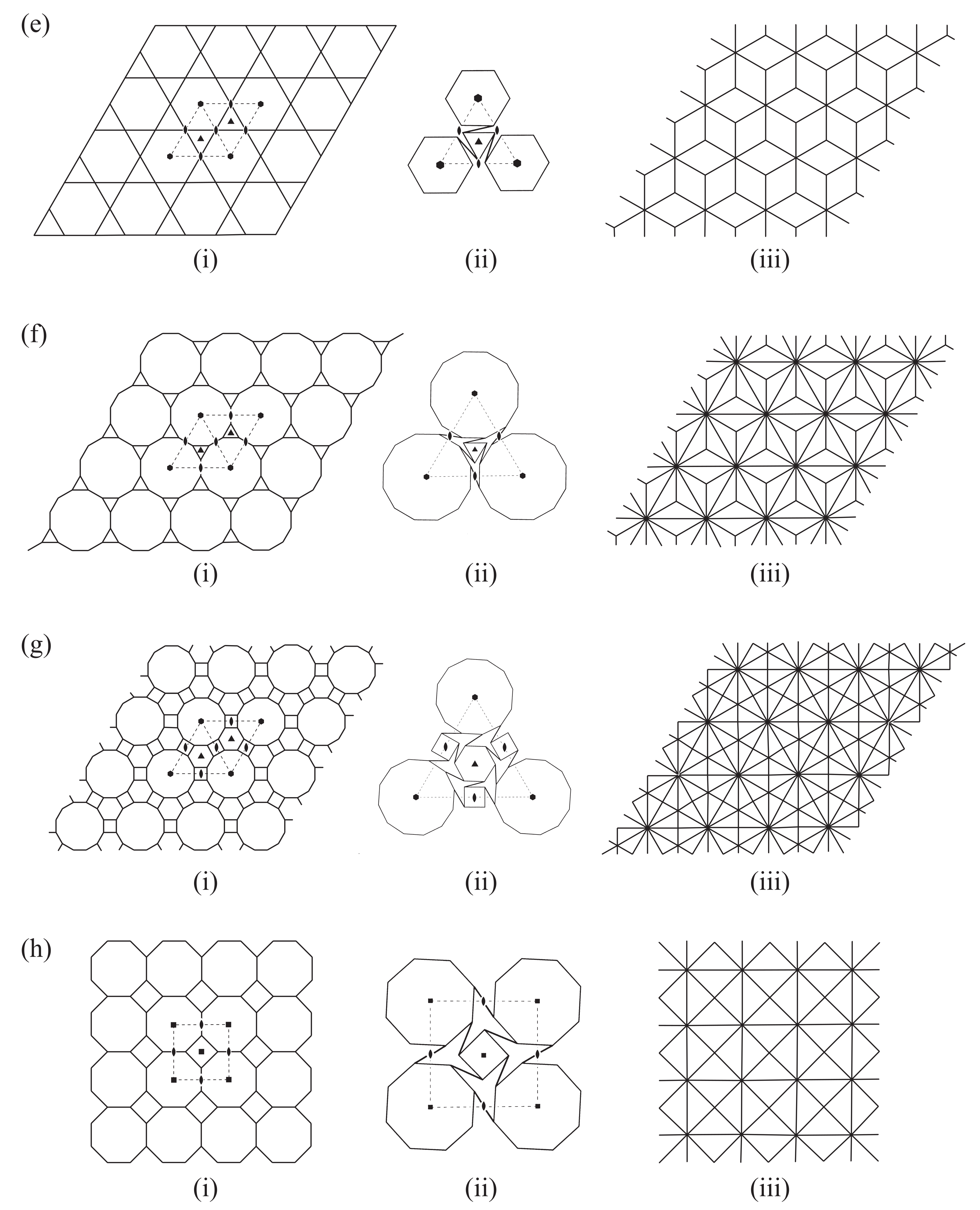
Table 9 for each of the single-link Archimedean tilings. For an explicit example of how characters are calculated, consider
Table 2 for tiling
. The rhomboidal unit cell, shown below in
Figure 2a, contains in total one hexagon and eight triangles. At each corner of the cell, a
axis (and hence also
and
axes) passes through the centre of the unique hexagon
h; a
axis passes through the centres of triangles
and
in the interior of the cell, and a two-fold axis passes through edge midpoints
, at the centre of the cell, and
,
at the centres of the cell edges.
The face centres of the tiling are vertices of the Laves dual, and edge centres in both the tiling and its dual coincide, so the Laves tiling defines the contact polyhedron C. As noted earlier, reducible representations and are permutation representations in which the entries count the appropriate structural components unshifted within the unit cell (or moved to translationally equivalent sites in neighbouring cells) by the rotations that comprise point group . Equivalently, this counting can be achieved by keeping track of the number of symmetry element symbols that lie within a unit cell (with fractional counting for elements on the cell perimeter). The characters of permutation representations are by definition purely real, even though the separably degenerate irreducible representations of cyclic groups have complex characters.
For this tiling, with odd values of
k, the entry in
under
is 1 (
h preserved); under
it is 3 (
h,
,
all preserved); under
it is 1 (only
h preserved, as no other face of the tiling is pierced by a
axis). The edge representation
has entry 0 for
and
(an edge in a 2D lattice cannot lie on a
axis with
), and the entry for
is 3 (
,
,
all preserved). For even values of
k, entries under
and
are unchanged, but the entry under
is 4 (
,
,
,
preserved); likewise, the entry in
is now 0 (as no symmetry element passes through an edge). Characters under the identity are trivially equal to the tile counts of
for vertices and
for edges of
, respectively. Hence, as shown in
Table 10, the final result for the reducible representation
is a sum of
and
, i.e., a sum of
copies of the regular representation and one copy of the totally symmetric representation:
.
3.2. Discussion
Table 10 shows interesting systematics for single-link and double-link hinged tilings. In the case of single-link hinges, the mobility representation
is strictly positive in that all the single-link hinged tilings have at least one symmetry detectable mechanism, and none have a symmetry-detectable state of self-stress. In four cases, one regular (
) and three Archimedean (
,
, and
), there is a unique symmetry-detectable mechanism, which is non-degenerate and in fact totally symmetric. Hence, by the symmetry criterion for equiauxeticity discussed above, all four of these frameworks are detectably equiauxetic, giving us three new single-link cases.
3.3. Finiteness of Mechanisms
Furthermore, we claim that in each case, the detected equiauxetic mechanism extends to a finite motion. The interesting cases are those where the mobility representation is exactly , where is the totally symmetric representation in the point group. In such a case, we can argue that the predicted totally symmetric mechanism is not blocked by an equisymmetric state of self-stress (SOSS) and, hence, is finite and equiauxetic. We can characterise each SOSS by assigning a scalar to every bar to represent the tension in that bar. Proof that the equiauxetic mode is finite follows case by case.
Theorem 1. Single-link hinged versions of the tilings , , and each give an equiauxetic framework supporting a unique, totally symmetric, finite equiauxetic mode.
Proof. In each case, we consider a configuration close to the original closed arrangement, as pictured in the central column of
Figure 1. ‘Close’ here implies that this configuration occurs before the system reaches any ‘special’ configurations, where, for instance, sets of bars become aligned. If the chosen configuration can be shown not to have a state of self-stress, then the infinitesimal mechanism that is detected must extend to a finite path.
Case 1. Consider the
single-link tiling in
Table 7. If there were equal tensions in all bars connecting to a triangular tile, that tile would not be in equilibrium until the motion had reached the ‘special’ fully extended configuration with all bars directed radially from the triangle centre. We could assign zero tension to these bars, but that would require zero tension in all bars attached to any neighbouring dodecagonal tile, as this tile has alternating constraints connecting it to triangular and dodecagonal tiles. Therefore, the SOSS would have a zero scalar on every bar and would be the null vector. Thus, the equiauxetic mechanism is finite.
Case 2. For tiling
in
Table 8, the argument is similar but slightly more involved. If a hexagonal tile is in equilibrium, then the bars linking this tile to dodecagonal neighbours all have the same sign, and hence the bars linking hexagonal to square tiles have the opposite sign. If the square tiles are in equilibrium, then all bars to the dodecagonal tiles carry the same sign, and hence,
those tiles cannot be in equilibrium. Thus, the equiauxetic mechanism is finite.
Case 3. A similar argument applies to the tiling
, in
Table 9, established by requiring equilibrium of square and then octagonal tiles. Hence, the motion is finite in this case too.
Case 4. Of the regular tilings, the hexagonal tiling
also has
equal to a single copy of the totally symmetric representation. The argument here is simple, in that all bars are equivalent, so if any one bar is in tension, equilibrium is impossible [
19]. Hence, all cases (1) to (4) have finite equiauxetic mechanisms. □
In summary, there are four cases where the single-link frameworks have
equal to
A, implying a single, equiauxetic mode for all choices of unit cells. These are
,
,
, and
. The regular
was treated in [
19]. Here, we have identified three more equiauxetic frameworks by extending symmetry counting calculations to single-link hinged Archimedean tilings.
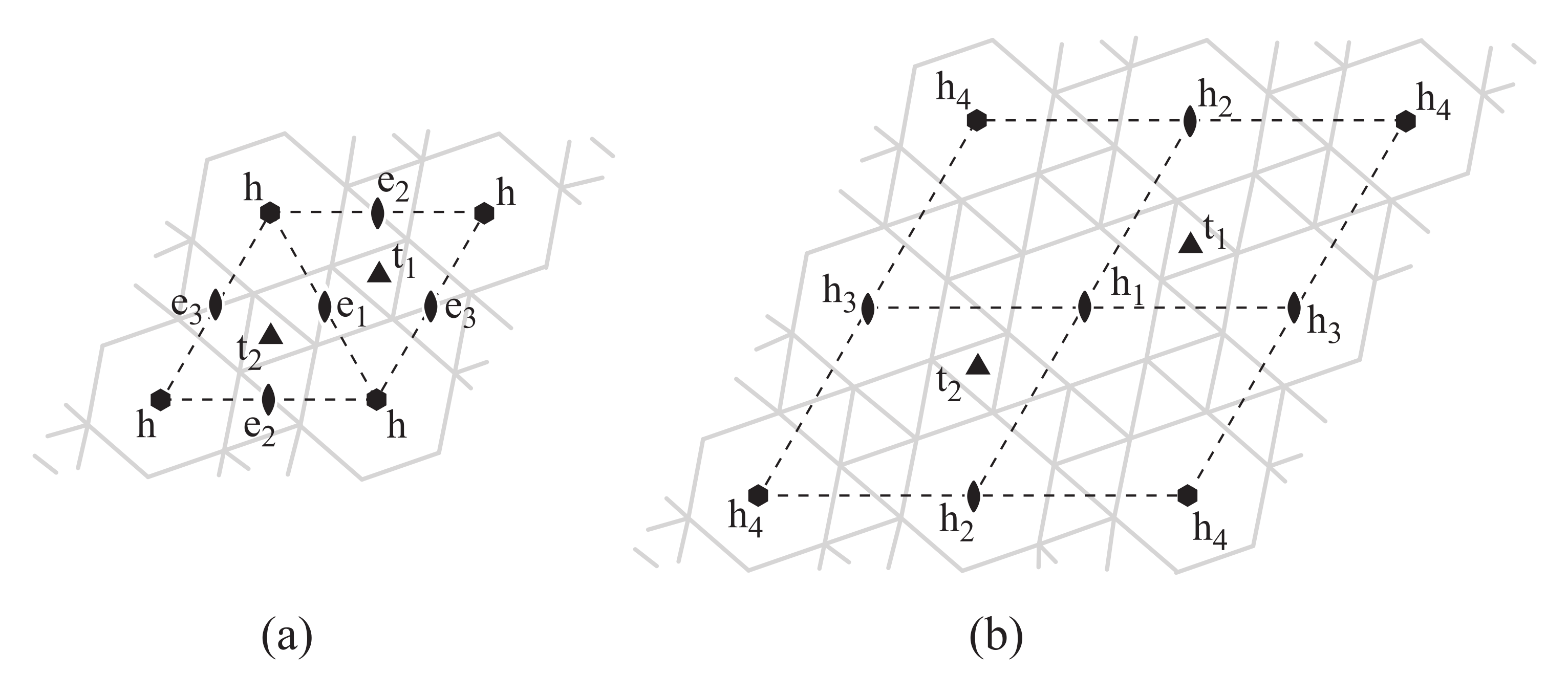
4. Double-Link Hinged Tilings
We also consider here the double-link analogue of the hinged structures discussed above. These have been described before for regular tilings [
19], and an example of the construction for doubling up on the number of links is shown in
Figure 3.
For double-link hinged tilings, the mobility count is again given by the trace of Equation (
3) under the identity,
as
and
in 2D, and
n counts the bodies (tiles) as before, but now two bars are associated with each of the
b edges in the unit cell. In the double-link case, the site symmetry of any individual bar constraint is the trivial
.
Calculations and Discussion
The mobility calculation for the double-link version of a hinged tiling is identical to that for the single-link in all but one respect. There are now two constraints per edge of the original tiling, and there is no symmetry element preserving a constraint. The permutation representation now has equal to twice the value for the single-link version, but zero under all other operations, i.e., it is a multiple of . Hence, is available by a simple modification of the tabulated character calculations for the single-link case.
The results for the modified calculation have already been given in the final column of
Table 10. For the single-link hinge tilings, many cases have mechanisms in addition to the totally symmetric expansion that is present in all cases. The double-link version is overconstrained according to the scalar count in almost all cases. (The exceptions are the zero counts for
and
with
). In the symmetry counts, the same overconstraint is shown in the reducible representation
for general values of
k, which typically includes a positive multiple of the totally symmetric representation
A balanced against a negative multiple of the regular representation proportional either to
or
. Hence, the totally symmetric representation
A appears in
with zero or negative weight in most cases. The exceptions, where the sole symmetry-detectable mechanism is of
A symmetry, are the four double-link hinged frameworks with
based on
,
,
, and
. The regular case
was treated in [
19]. Here, we have identified three more equiauxetic frameworks by extending symmetry counting calculations to the double-link hinged Archimedean tilings.
We can show that the equiauxetic modes in these cases are finite mechanisms.
Theorem 2. Double-link hinged versions of the tilings , , and (all with ) each give an equiauxetic framework supporting a unique, totally symmetric, finite equiauxetic mode.
Proof. We start by establishing two symmetry conditions. Condition (1): Consider an n-gon of the tiling that has an n-fold axis of symmetry through its centre. For such a polygon, all n edge pairs must have the same member forces and (call this, for simplicity, a type-1 n-gon). For a type-1 polygon, n rotated copies of , and can only give equilibrium if each resultant of and passes through the centre of the n-gon. (This is always possible for some values of and if the two links are not collinear.). Since and are parallel, their resultant is also parallel with them. Near to the initial configuration, however, the resultant cannot pass through the centre of the other (connected) polygon. Condition (2): Any pair of links on a -element enforces , and runs along the midline of and .
Now we look at the tilings case by case.
Case 1. : Condition (2) forces each to be parallel with its pair of links and not passing through the centres of connected hexagons, 6-fold symmetry implies six resultant forces representing the same moment about the centre of the hexagon, and hence, equilibrium is not possible with non-zero forces in links in this case.
Case 2. : Both the hexagons and triangles are of type 1, so any resultant should be directed through the centres of the connected hexagon and triangle, which is not possible in a general configuration near to the initial closed configuration.
Case 3. : Consider the double-link analogue of
Figure 1a(ii). Since both the hexagon and the central triangle (with a
axis in its centre) are of type 1, the resultant of forces around the hexagon (call it
) and any non-zero resultant of forces around the central triangle (call this
) must go through their respective face centres. Now, any non-central triangle must be balanced by a copy of
and
, as well as by the third resultant
S represented by the pair on a
axis. Close to the initial state, however, it is impossible for these to be concurrent since the intersection of
and
is outside the triangle, just beyond its vertex in front of the
axis, while
S passes that
axis and is nearly parallel to the edges on which
S acts. Hence, equilibrium is not possible with non-zero forces in links in this case.
Case 4. : Consider the double-link analogue of
Figure 1c(ii). Since squares are of type 1, all resultants of
are equal and pass through the centres of their respective faces. Now, close to the initial configuration, any pair of triangles sharing a
axis is surrounded by four copies of
that have a moment with the same sense about the shared
axis. Hence, equilibrium is not possible with non-zero forces in links in this case. □
An animation of the equiauxetic mode for the double-link hinged Kagome framework (
) is available as file S1 Kagome.mp4 in the
Supplementary Material for this article.
5. Conclusions
The analysis reported here has illustrated the power of applying symmetry to the mobility criteria for periodic frameworks. The extension from pure counting to counting-with-symmetry typically leads to stronger necessary conditions for motion. Here, we have shown that the extended count given by the master equation for periodic body-bar frameworks (
3), combined with the criterion for equiauxeticity from
Section 2.2, allows us to detect generic equiauxetic behaviour in plausible models of 2D materials and metamaterials based on the canonical Archimedean tilings of the plane.
The main result of this analysis is the identification of two new sets of equiauxetic 2D frameworks, one set emerging from tilings with single links and the other from tilings with double links.
For single-link frameworks of the type shown in
Figure 1, scalar counting shows that all are underconstrained. The symmetry-extended calculation shows that every framework has at least one totally symmetric, equiauxetic mode, and it detects no states of self-stress. Exactly four of the regular and Archimedean tilings generate equiauxetic single-link frameworks. These are
,
, and
, and the previously identified [
19] regular hexagonal case
.
In contrast, double-link frameworks of the type shown in
Figure 3b are typically overconstrained, as the scalar counts for
show for all but
,
and
. The application of symmetry reveals that these counts mask the existence of a totally symmetric equiauxetic mode for
, for all but
and
. In four cases, the only mechanism detected by symmetry is the totally symmetric equiauxetic mode, and hence these are equiauxetic frameworks. These are
,
,
, and the previously identified [
19] regular hexagonal case
.
Counting arguments for mobility lead to necessary rather than sufficient conditions as they relate to a difference, not an absolute value. This is true of scalar counting and is still true of counting with symmetry. Addition of an equal number of mechanisms and states of self-stress does not change , and addition of equisymmetric sets of mechanisms and states of self-stress (i.e., sets that transform in the same way under all symmetry operations of the framework) does not affect . In this connection, an interesting observation from the calculations reported here concerns the single-link hinged tilings and . The same scalar count of independently of k holds for both because the triangles in the interstices between the 12-gons add to the count of freedoms, but this is cancelled by the constraints imposed by the bars that connect to the triangles. In the character table calculation of the symmetry , the scalar count implies that the character under the identity operation is the same for the single-link hinged tilings and . The triangles of lie on axes, and hence the has character 3 under the associated operations, but this does not contribute to as the character of the rigid body modes is zero for this operation. In effect, the contact polyhedron for can be reduced to that of and by removing the vertices and edges associated with the triangles without affecting . The missing tiles can be reinstated with an appropriate rotation for any configuration of the framework.
Although the examples in
Figure 1 refer to equilateral tiles, the symmetry calculations would be the same for a wider class of systems. For example, subject to retention of symmetry, edge lengths might be modified or gaps might be introduced between tiles, and indeed, the precise geometry of the single and double links has not been specified here beyond the restrictions imposed by symmetry.
It is also interesting to compare the present study with results on the mobility of tilings constructed under different physical models. In [
7,
16,
18], Archimedean tilings are included amongst examples of bar-and-joint frameworks defined in a different way by considering the edges of the tiles as a bar-joint network rather than considering the tiles as rigid-bodies—that model also generates equiauxetic frameworks of a different kind.
Other directions for future work suggested by the present investigation include physical modelling of the systems studied here and extension of the symmetry techniques to 3D. Reproduction of pin-jointed frameworks with 3D printing techniques is problematic, but by introducing elasticity and replacing the pin joints with ‘elastic joints’, it should be possible to study the resulting compliant mechanisms in physical models produced by this technology. Extension of our symmetry reasoning to the design of auxetics and equiauxetics in 3D is also a compelling future direction for this research area. We believe that the symmetry approach has much to offer in terms of generating ideas for new metamaterials and in analysing the performance of systems of this type.








{kind=link}
{kind=link}
{kind=link}
{kind=link}