5.2. Physical Deployment of the Jason BDI Agents
The physical case study applies the above fuzzy BDI code, which was given in Listing 3 and the corresponding membership function. Brief information about the physical components will be shared to provide better insight into the physical setup.
5.2.1. Embedded Hardware
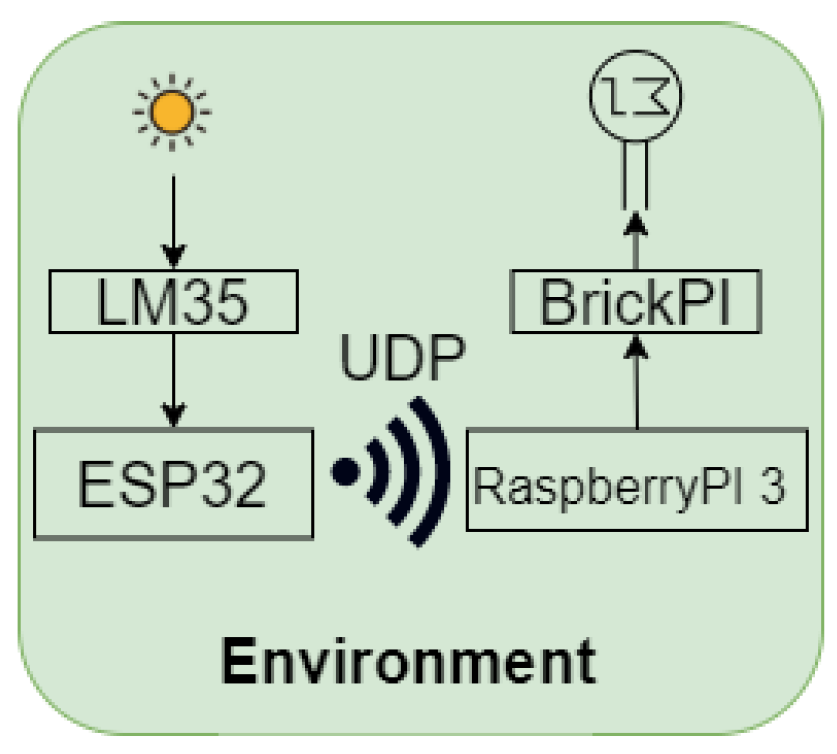
To achieve CPS and IoT interoperability, the study was extended using the ESP32 IoT development board, the LM35 temperature sensor, and Raspberry Pi 3 + BrickPi boards. LM35 was connected to the ESP32’s analog pin to sample the environment’s temperature. ESP32 sends the collected data to the Raspberry Pi 3 board using UDP communication. The Jason agent then stores these data into its belief base via the Java environment and actuates the fan through a motor.
Figure 5 represents the connection architecture to implement the physical case study and
Figure 6 illustrates the concrete implementation.
The concrete implementation consisted of an LM-35 temperature sensor. The ESP32 sampled the temperature data and delivered them to Raspberry Pi 3. In Raspberry Pi 3, the software agent was deployed. The software agent reasoned (based on the membership degree) and arranged the speed of the motor.
The ESP32-WROOM-32 microcontroller is a low-end, low-cost, dual-core microcontroller from the embedded hardware family. It integrated Wi-Fi and Bluetooth modules that targeted various applications ranging from low-power sensor networks to the most demanding tasks.
LM-35 temperature sensor can measure from a −55-degree centigrade to a 150-degree centigrade. The input voltage can vary from +4 to 30 volts. It consumes around 60 microamperes. For each one-degree increase, the voltage raises by +10 volt mills by the sensor’s vout pin, e.g., if the sensor outputs 100-volt mills at the vout pin, then the temperature (in centigrade) will be 10 degrees centigrade.
Figure 7 represents the LM-35 temperature sensor.
Raspberry Pi 3. It is high-end embedded hardware, as shown in
Figure 8. Raspberry Pi 3 is a credit card-sized low-powered computer board with Ethernet and Wi-Fi connections. Moreover, it has an HDMI video output, an audio output, and an SD card slot to run a Linux operating system. Raspberry Pi is beneficial hardware used for high-end tasks. It has many adaptation and extension boards for specific domains and goals.
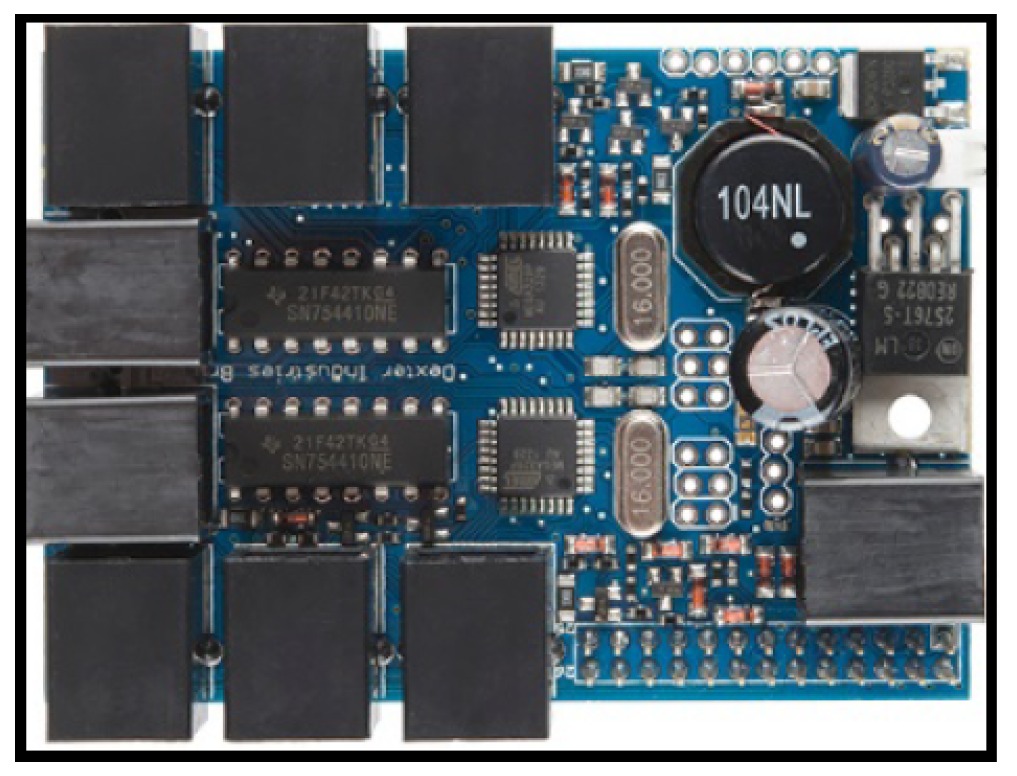
The BrickPi Hardware Interface is a hardware interface for Raspberry Pi that allows controlling special sensors and actuators. The BrickPi is attached to the top of the Raspberry Pi. It allows controlling the servo motors that can rotate at high-speed.
Figure 9 depicts the BrickPi adaptation hardware interface.
As mentioned, we created an IoT system to establish CPS and IoT interoperability. While the CPS has tightly-coupled relations with the agents, the IoT system was designed as loosely coupled because we preferred using ESP32 as a low-end device. Here, a low-end device refers to embedded hardware that samples the data and sends it to the agents and artifacts container device (Raspberry Pi 3). In
Section 5.2.2, embedded software that was used to program these devices will be provided.
5.2.2. Embedded Software
The ESP32 software, shown by Listing 4, was implemented using Arduino IDE. Lines 2 and 3 included Wi-Fi and Wi-Fi-based UDP functionalities. Lined 4 and 5 were used to define the network SSID and password while lines 6 and 7 stored the target device’s IP address and destination port. A UDP instance was created at line 9. Between lines 10 and 17, the setup function was defined to create necessary configurations for Wi-Fi, UDP initialization, and connection status. The loop function ran the code lines between 20 and 24 continuously. For each cycle, the temperature value was read from pin 36 and sent via UDP using the beginPacket function. The packet ends at line 24.
| Listing 4. ESP32 Software for sampling temperature data and sending it via UDP. |
- 1
#include <WiFi.h> - 2
#include <WiFiUdp.h> - 3
/* WiFi network name and password */ - 4
const char * ssid = "SSID"; - 5
const char * pwd = "password" - 6
const char * udpAddress = "192.168.0.164"; - 7
const int udpPort = 4444; - 8
// create UDP instance - 9
WiFiUDP udp; - 10
void setup(){ - 11
Serial .begin(115200); - 12
// Connect to the WiFi network - 13
WiFi.begin(ssid, pwd); Serial.println(""); - 14
// Wait for connection - 15
while (WiFi.status() != WL_CONNECTED) { - 16
delay(500); - 17
Serial.print("."); } - 18
//This initializes udp and transfer buffer - 19
udp.begin(udpPort);} - 20
void loop(){ - 21
int sensorReading = analogRead(36); - 22
udp.beginPacket(udpAddress, udpPort); - 23
udp.printf("%u \n", sensorReading); - 24
udp.endPacket();}
|
Listing 5 represents the UDP receiver software in the Jason environment. As Jason uses Java as an environment, a Java function was implemented to receive UDP packets. In line 1, the listening port was defined and a buffer was created in line 2. getUDPMessage was created to receive incoming packets. When a packet was received, it was stored in the belief base and the StringBuilder function was called to transform the data into human-readable text. The Jason agent called this function for each agent cycle, updated its belief base, and then selected the suitable plan according to the context of the data. To achieve this, the agent software mentioned in Listing 3 was modified, as given by Listing 6.
| Listing 5. UDP Receiver software in the Jason environment. |
- 1
ds = new DatagramSocket(4444); - 2
receive = new byte[1024]; - 3
public void getUDPMessage() { - 4
UDPrev = new DatagramPacket(receive, receive.length); ds.receive(UDPrev); - 5
updateFBDIPercepts(Double.parseDouble (data(receive)); - 6
public, StringBuilder data(byte[] a){}
|
| Listing 6. UDP Receiver software in the Jason environment. |
- 1
isit(T):− temp(T,D1) & not(temp(_,D2) & D2>D1). - 1
isit(T):− temp(T,D1) & not(temp(_,D2) & D2>D1). - 2
!init. - 3
+!init: true <− .print("starts"); .wait(4000);!sample. - 4
+!sample: true <− .wait(1); sampleSensorData;!keepCool. - 5
+!keepCool: isit(cold) <− ?temp(cold,D1);fanAction(250,D1); !sample. - 6
+!keepCool: isit(warm) <− ?temp(warm,D1);fanAction(350,D1); !sample. - 7
+!keepCool: isit(hot) <− ?temp(hot,D1);fanAction(500,D1); !sample.
|
At line 2, the agent was initialized using !init goal. Line 3 instructed the goal by selecting a suitable plan. At first, the agent waited for 4 seconds to be sure that the hardware configurations were prepared. Then, according to the incoming data, fuzzy-based plans were selected using the ”isit(T)” rule in line 1. However, when the data packets were sent, a lag was observed between the sent data and the received data. Therefore, time measurements were taken to detect the bottleneck.
5.2.3. Time Measurements
We sampled the time parameters of each phase to which the data were transferred to. Experiments were achieved in a LAN network using a private modem and wireless connections. The time synchronization was established using an NTP server in ESP32-Arduino software using a Java library in the agent software and a physical–digital clock. The time variable was sent to the agent software and was subtracted by the current time. The NTP server in the ESP32-Arduino server is shown in Listing 7.
| Listing 7. Code Excerpt to establish an NTP server in ESP32-Arduino software. |
- 1
#include "time.h" - 2
char timeSeconds[3]; - 3
const char* NTPServer = "pool.ntp.org"; - 4
const long GMTOffset_sec = 3600; const int DayLightOffset_sec = 0; - 5
configTime(GMTOffset_sec,DayLightOffset_sec,NTPServer);
|
The agent instructs the UDP receiver function for each reasoning cycle to gather the temperature data, which are sent by ESP32. However, we discovered that the agent’s reasoning cycle was slower and caused desynchronization between the real-time temperature change and actuation. Therefore, we tested each phase to validate that our assumption was true. Moreover, we tested our fuzzy function with pure Java and pure Python implementations. To measure the time differences, the incoming time variable was subtracted by the local time of the target device. In this case, the target device was the Raspberry Pi that ran the agent. To achieve this, the LocalDateTime.now().getSecond() function was used.
Considering the values in
Table 1, we decided to use a single plan (see Listing 8), which only realized receiving UDP packets that had enumerated data. We discovered that there were packet losses during the datagram packet transmission. Considering a non-enumerated packet transmission, it was not possible to detect the cause of the time delay and data desynchronization. Therefore, we experimented with the bottleneck using two different devices as clients—ESP32 and PC. To detect the packet losses, we applied different message counts. The PC that ran the experiments had 16 GB of RAM; Intel(R) Core(TM) i7-10850H, 2.70GHz, 2.71 GHz CPU.
| Listing 8. Simple plan to receive UDP messages. |
- 1
+!sample: true <− sampleSensorData; !sample.
|
Considering
Table 1 and
Table 2, a thread mechanism should be created to automatically update the agent’s knowledge base without calling any sensing action. This thread should be created inside the Jason environment. In this way, the software agent could synchronize with the temperature data stream. However, creating extra threads caused some problems as the software agents are the thread owners, and their mechanisms are private. Therefore, we adapted our approach using the
CArtAgO framework, which provided many advantages and thread-safe operations that will be mentioned in
Section 5.3.
5.3. Enhancing BDI Agents Using Fuzzy Logic and JaCa
As mentioned in
Section 2.2, the CArtAgO framework models the software agents’ environment using artifacts. They can be considered the computational components that produce beliefs and events for the agents. The artifacts also provide modularity and encapsulation. In this way, an artifact becomes observable by more than one agent, and the agents can also create more than one instance of that artifact. The value of an artifact is updated using the
updateValue method. CArtAgO then implicitly updates the belief base of the corresponding agent(s). In this way, the artifacts can be used in a thread-safe manner. As a fuzzy logic controller has many computational stages, each stage can be interpreted as an artifact. By applying the separation of concerns principle, independent refinement of the computational resources for controlling and computing is achieved. In other words, a fuzzy logic controller, a timer, or a communication interface can advance by adding new features without blending the code into the agent programming level.
In our JaCa implementation, an initial plan was implemented to have the agents create their artifacts. Listing 9 shows the mock-up sensor artifact creation.
| Listing 9. The artifact creation plan. |
- 1
makeArtifact("mocksensor1","example_JaCaMo.MockSensor",[],MockSensor1); - 2
mockdata[artifact_id(MockSensor1)]; - 3
focus(MockSensor1);
|
In our fuzzy BDI-based JaCa implementation, we created multi-agents by assuming that they were distributed inside a room. In line 1, the agents created the mock-up sensor artifact, naming it the MockSensor1. The agent could instantiate more than one mock-up sensor artifact. It calls the “mockdata” operation to generate a floating value between 6 and 35, randomly. These values mimic the usual room temperature. The agent focuses on this artifact to keep track of its state changes. As creating uncertain events may not be so realistic in a physical environment, a mock-up sensor artifact was created.
The lines between 1 and 2 in Listing 10 show how the mock-up sensor generates temperature data. Once the temperature value is generated, it becomes fuzzified. As mentioned in
Section 2.5, the first phase is the fuzzification of the crisp number. As three membership degrees are given, this artifact should have three observable properties, namely d1, d2, and d3. The lines between 7 and 24 show the implementation of fuzzy triangular sets (for the sake of brevity, an excerpt of it is shown). The boundary overlaps were implemented as shown between lines 16 and 18.
| Listing 10. Mock-up sensor artifact. |
- 1
SecureRandom r = new SecureRandom(); - 2
double random = 6.0 + r.nextDouble() * (35.0 - 6.0); - 3
double d1,d2,d3; - 4
defineObsProperty("d1", 0.0); - 5
defineObsProperty("d2", 0.0); - 6
defineObsProperty("d3", 0.0); - 7
if(n_cpuTemp<6.5. - 8
{ d1=n_cpuTemp/6.5; - 9
d2=0.0; - 10
d3=0.0; - 11
d1f.updateValue(d1); - 12
d2f.updateValue(d2); - 13
d3f.updateValue(d3); - 14
}else if(n_cpuTemp>=6.5 && n_cpuTemp<18.0) - 15
{ d1=(18.0-n_cpuTemp)/11.5; - 16
if (n_cpuTemp>=10.0) { - 17
d2=(n_cpuTemp-10.0)/9.5; - 18
} - 19
else - 20
d2=0.0; - 21
d3=0.0; - 22
d1f.updateValue(d1); - 23
d2f.updateValue(d2); - 24
d3f.updateValue(d3); - 25
} …
|
A triangular function that has a lower limit
a, upper limit
b, and any value
m between these limits where
a < m < b, can be defined as the fuzzy set using the functions shown by Equation (
1).
In our implementation, we used triangular fuzzy sets to form the fuzzy logic controller. To provide better insights for the rest of this subsection, the fuzzy rules and fuzzy functions were given beforehand.
Figure 10 shows the triangular fuzzy functions, which were used to implement the fuzzy logic controller. Listing 11 shows the fuzzy rules of the fuzzy logic controller and Listing 12 lists the fuzzy function boundaries.
| Listing 11. Fuzzy rules of the fuzzy logic controller. |
- 1
RULE 1: IF sensor IS cold AND time IS short THEN speed IS low; - 2
RULE 2: IF sensor IS warm AND time IS long THEN speed IS average; - 3
RULE 3: IF sensor IS hot AND time IS long THEN speed IS average; - 4
RULE 4: IF sensor IS hot AND time IS extreme THEN speed IS fast; - 5
RULE 5: IF sensor IS hot AND time IS short THEN speed IS fast; - 6
RULE 6: IF sensor IS warm AND time IS short THEN speed IS average; - 7
RULE 7: IF sensor IS warm AND time IS extreme THEN speed IS average; - 8
RULE 8: IF sensor IS cold AND time IS short THEN speed IS low; - 9
RULE 9: IF sensor IS cold AND time IS extreme THEN speed IS average;
|
| Listing 12. Fuzzy function boundaries. |
- 1
//Sensor - 2
TERM cold:= trian 0 6.5 18; - 3
TERM warm:= trian 10 19.5 26; - 4
TERM hot:= trian 21 32.5 39; - 5
//Time - 6
TERM short:= trian 0 10 25; - 7
TERM long:= trian 15 30 45; - 8
TERM extreme:= trian 35 50 60; - 9
//Speed - 10
TERM low:= trian 0 166.5 370; - 11
TERM average:= trian 250 499.5 750; - 12
TERM fast:= trian 666 832.5 999;
|
As mentioned, time-based reasoning was also considered. Therefore, a timer artifact was created. To create the timer artifact, the Java timer library was used. As shown in Listing 12, three membership degrees were given. Therefore, three observable properties were created—t1, t2, and t3.
The same implementation code that is shown in Listing 10 (with corresponding boundary values for time inputs) was used to create the timer artifact shown by Listing 13. However, this artifact had extra operations, such as stopping the timer and signal calling for the expiration of the time. The save function, defined by lines 8 to 12, is used for creating a session and committing the changes. Because the timer artifact creates an extra thread in addition to the agent’s main thread, an external session must be created to achieve a thread-safe operation. As the timer updates itself each second, it should commit these changes after one second without waiting for the reasoning cycle or any scheduled event. Therefore, the commit function is called. If the timer expires (1-min duration) then it sends a signal to the agent by creating an event, namely timerExceeded.
| Listing 13. Timer artifact. |
- 1
final Timer timer = new Timer(); - 2
defineObsProperty("t1", 0.0); - 3
defineObsProperty("t2", 0.0); - 4
defineObsProperty("t3", 0.0); - 5
timer.scheduleAtFixedRate(task, 0, 1000); - 6
save(); - 7
… - 8
void save() { - 9
this .beginExternalSession(); - 10
commit(); - 11
this .endExternalSession(false); - 12
p.updateValue(p.intValue()+1); - 13
… - 14
void timer_stop() { - 15
this .beginExternalSession(); - 16
timer.cancel(); - 17
timer.purge(); - 18
this.endExternalSession(false); - 19
… - 20
private void call_signal() { - 21
this .beginExternalSession(); - 22
signal("timerExceeded"); - 23
this .endExternalSession(false); - 24
}
|
As mentioned in
Section 2.5, a Mamdani-style fuzzy logic controller was implemented using CArtAgO artifacts. The
AND operation was realized using the
Math.min Java function. Listing 14 shows the inference phase of the AND operation. The rules given in Listing 11 were implemented, applying the
Min operation on sensor and time membership degrees. The lines between 1 and 12 show the cold-time,warm-time, and hot-time parameters and their target projections to the
speed fuzzy functions. To realize the rule aggregation to find the dominant rules, the
Max function was used and stored in the array, namely
selected.
| Listing 14. Rule Inference Phase using AND (Min). |
- 1
//Cold − Time - 2
double min1 = Math.min(d1_t, t1_t); // => S1 − Low - 3
double min2 = Math.min(d1_t, t2_t); // => S1 − Low - 4
double min3 = Math.min(d1_t, t3_t); // => S2 − Avg - 5
//Warm − Time - 6
double min4 = Math.min(d2_t, t1_t); // => S2 − Avg - 7
double min5 = Math.min(d2_t, t2_t); // => S2 − Avg - 8
double min6 = Math.min(d2_t, t3_t); // => S2 − Avg - 9
//Hot − Time - 10
double min8 = Math.min(d3_t, t2_t); // => S2 − Avg - 11
double min7 = Math.min(d3_t, t1_t); // => S3 − Fast - 12
double min9 = Math.min(d3_t, t3_t); // => S3 − Avg - 13
- 14
… - 15
Double[] S1 = {min1,min2}; - 16
Double[] S2 = {min4,min5,min6,min8}; - 17
Double[] S3 = {min7,min9}; - 18
double[] selected = new double[3]; - 19
selected[0] = Collections.max(Arrays.asList(S1)); - 20
selected[1] = Collections.max(Arrays.asList(S2)); - 21
selected[2] = Collections.max(Arrays.asList(S3));
|
In the next phase, defuzzification should be done to receive the crisp output according to the partial projected area of the speed fuzzy functions. Listing 15 shows the defuzzification implementation and required functions.
| Listing 15. Defuzzification Phase. |
- 1
calculateDeFuz(selected[0],selected[1],selected[2]) ; - 2
void calculateDeFuz(double bound1,double bound2,double bound3) { - 3
int high_b=decide_low_limit(bound1,bound2,bound3); - 4
int low_b=decide_high_limit(bound1,bound2,bound3); - 5
- 6
for (speed = low_b; speed <high_b_b; speed+=1) { - 7
if (speed < 166.5) { - 8
d1 = speed / 166.5; - 9
d2 = 0.0; - 10
d3=0.0; - 11
} else if (speed >= 166.5 && speed < 370.0) { - 12
d1 = (370.0 − speed) / 203.5; - 13
if (speed>=250.0) { - 14
d2=(speed−250.0)/249.5;} else - 15
d2=0.0; d3=0.0;} - 16
else if(speed>=370.0 && speed<499.5) - 17
{ d1=0; d2=(speed−250.0)/249.5;d3=0;} - 18
… - 19
- 20
int decide_high_limit(double bound1,double bound2,double bound3) - 21
- 22
if (bound1 != 0.0){ - 23
low_bound[0] =0;} - 24
if (bound2 != 0.0){ - 25
low_bound[1] =250;} - 26
if (bound3 != 0.0){ - 27
low_bound[2] =666;}} - 28
return Collections.min(Arrays.asList(low_bound)); - 29
- 30
double val = findMaxAndCut(d1,d2,d3,bound_a,bound_b,bound_c); - 31
total2+=val; total1 +=(val*speed); System.out.println("DEFUZZ= "+total1/total2); - 32
public static double findMaxAndCut(double d1, double d2,double d3,double bound1,double bound2,double bound3) { - 33
if (d1>bound1) - 34
d1=bound1; - 35
if(d2>bound2) - 36
d2=bound2; - 37
if(d3>bound3) - 38
d3=bound3; - 39
return Math.max(d3,Math.max(d1,d2));}}
|
To achieve the defuzzification and automate this phase, the dominant rules stored in the
selected array are given as parameters to the
calculateDeFuz function. Then, low and high boundaries are found. In this way, the delta steps can scan the projected area on the speed variables’ fuzzy functions. Then, the “for loop” at line 6, approaches with delta steps starting from the low boundary to the high boundary by incrementing the speed variable, triggered if conditions calculate the membership degrees stored in the variables, namely d1, d2, and d3. These variables are then sent to the
findMaxAndCut function; if there is a membership degree that exceeds the limits of the membership degrees, it is set to that limit. The function then returns the maximum membership degree, which also scans the lower membership degrees. As mentioned, we used the
center of gravity as the defuzzification method. Line 31 shows the calculation of the projected area on the speed’s fuzzy functions according to the
center of gravity method. To validate the defuzzification step, the results from the jFuzzyLogic [
61] were compared with our implementation. As can be seen from
Figure 11, the difference is quite minor; it should also be considered that the API that sets the velocity accepts only integer numbers.
As mentioned in
Section 5.2.3, there was an 8–10 second lag between the sent data and the received data. To tackle that problem, the changes described in Listing 16 were made. At first, the code shown in Listing 5 was adapted as an artifact. As shown in line 1, the agent then created that artifact and a separate intention using the
!! notation. As lines 2 to 7 show, the
getUDPMessage function was enhanced with CArtAgO’s
ExternalSession function. In this way, a thread-safe and asynchronous flow was achieved. Lastly, as shown in line 7, after the compilation of the
getUDPMessage, to receive the incoming packages, the plan was recalled to create a continuous loop in a separate intention (using a separate thread). As shown in
Figure 12, the process was also tested using the
Packet Sender application. After these steps, the software agent was deployed onto embedded hardware. A sample video could be viewed at
https://youtu.be/mJLZpoMGxrA (accessed on 15 June 2022).
| Listing 16. Communication Interface Artifact. |
- 1
makeArtifact("udp0","example_JaCaMo.getUDPMessage",[],IdUDP);!!udpFollow; - 2
getUDPMessage(){ - 3
this .beginExternalSession(); - 4
… - 5
this .endExternalSession(false); - 6
} - 7
+!udpFollow <− getUDPMessage;!udpFollow.
|
Distributed and Adaptive Scenario
As mentioned, the MAS provides distributed topology for the CPS and IoT systems. In a distributed topology, it is expected that the instances in the network should be able to communicate with each other to transfer information. As multiple fans inside a room attempt to cool down the room temperature because of an uncertain event, one of the node sensors may become broken or unavailable for a few seconds. In this case, the software agent should be able to adapt. Therefore, the time criterion was considered and fuzzified. In case the time criterion has a membership degree in the extreme state, the agent switches to the adaptation state by running the
adapt plan. The agent broadcasts the need for sensor input membership degrees to the whole network. However, because of environmental heterogeneity, the agent should evaluate the data provided by the other agents based on time and distance. For example, if one of the other agent sensors is also unavailable for a few seconds, it could be
long, but not
extreme. Then, the membership degrees of the sensor input should be lowered and sent to the agent that broadcasted for the membership degrees. Therefore, a relation between distance and the time criteria should be established to compensate for the membership degrees, to be sent to the agent that requires an update. The
hedge modifier, especially the
concentration operation, can be applied to modify the agents’ beliefs about their membership degrees. As Equation (
2) shows, the hedge concentration can be defined as:
Regarding fuzzy set
A and membership function
, defined by Definition 1 in
Section 2.5,
A represents the concentrated form of any given membership degree
base value to the power of the positive
k value. Recall the Definition 1,
ranges
and
k is any positive real number in this limit. Therefore, the agents’ beliefs can be sharpened using this operation, considering
k going to infinity and
A approaching zero. Moreover, as the physical rules are applied in a distributed CPS/IoT topology, the
k value is bound with respect to time and distance, resulting in the definition of Equation (
3).
If the neighbor agents have any membership degree to the extreme of time input, they return
for each membership parameter. If there is no membership degree to the
extreme variable, then the neighbor agents send the three membership degrees of the sensor input using Equations (
3) and (
2). It is also assumed that the nodes cannot establish a connection with any node more than 10 meters away. Considering this scenario and its constraints, Equation (
3) was defined in terms of distance and time.
Therefore, distance
d has the limits of
. As mentioned in
Section 5.3, t2 represents the membership degree of the
long variable limited by
. As the k should be more than 1, the k value should still 1 in case
d and
values are minor. In this way, the k value represents the power of trust for the agent(s) requesting sensor data from the other agents. Naturally, it is assumed that trusting the sensor data to the closest agent is convenient, but data timeliness is also a determining factor in this case.
If the time is exceeded and no solution is found, the timer artifact sends a signal to the agent and calls for the technician. In
Section 6, the study is discussed, the paper is concluded, and future works are presented.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}