Abstract
For a robotic swarm system composed of autonomous mobile robots, controlling and using asymmetric global geometric states promotes the task performance of the swarm. This paper presents a systematic method for estimating asymmetric global geometric states over a swarm system. To overcome the limitations of local observation or communication ability, we propose a wave-type interaction among neighboring robots. We assume that each robot has a scalar state variable called a phase, which is manipulated through interactions. Through the analysis of eigenvalues of a graph Laplacian matrix corresponding to a local communication network of robots, we show that a robot can estimate global states, such as the size of an entire swarm, by frequency analysis of its phase. We also analyzed the stability of the wave-type interaction based on von-Neumann stability. We verified the proposed method by computer simulations, in which robots in a swarm detected the deformation in the shape of the swarm when the swarm was passing through a narrow area. The result will contribute to building a control system for swarms that can manipulate their shape or characteristics to adapt themselves based on tasks or environmental requirements.
1. Introduction
A robotic swarm system that is composed of many autonomous mobile robots is expected to improve efficiency by executing tasks such as searching, monitoring, and transporting, cooperatively. In this study, we assume that the robot is a decentralized autonomous robot, that has the ability to only make local observations and communication, and that the swarm is a set of robots that are connected by local communication. Such a swarm system has the advantages of robustness to failure of connections and ease of adding or eliminating robots. Due to this, we find many researchers discussing the control of robotic swarm systems [1,2].
Some of these are motivated by biological or physical phenomena [3,4,5,6], such as Boids [7], the hydro model [8], and coupled oscillator system (COS) [9,10]. We also find a theoretical backbone in consensus control, which is commonly used for formation control applications [11,12,13].
In consensus control, the robots in a swarm average their state variables (such as positions and directions of movements) among themselves. As a result, the state variables of the robots converge to the average of their initial values. Thus, the process of consensus control corresponds to diffusion interaction, which is also found in COS. Thus, diffusion interaction can control the global symmetric geometrical state of a swarm, such as its position and velocity of the center of gravity (CoG).
However, the CoG is not the only property of a swarm. For example, if a swarm is required to pass through a narrow area between obstacles, it must elongate its shape. In the process, the CoG may not change, although the shape is deformed. To control its non-averaging properties, robots in a swarm should know the global geometric states of a swarm, although they do not have any global observation or communication abilities.
We expect that a robot can estimate the global state of a swarm by observing the vibration modes of a standing wave occurring in a COS. To make this possible, a new type of interaction must be introduced so that a robot can watch the time change according to higher modes.
In this study, we propose a wave-type interaction among the robots in a swarm to estimate global geometric states, such as the size of the swarm, by using only the local observations or interactions. The major contribution of this paper is providing a method to determine the global state only by using local interactions along with von-Neumann stability analysis.
The organization of the rest of the paper is as follows. In Section 2, we define a target robotic swarm system and formulate the estimation problem. In Section 3, we clarify the relationships among the eigenvalues, eigenvectors, and the graph Laplacian matrix of a local communication network and show the representation of the global geometric state through Fourier analysis. In Section 4, we propose the wave-type interaction so that a robot in a swarm can estimate the eigenvalues by local interactions only. We also examine feasible designs of the parameter for interactions. In Section 5, we verify the proposed method by a computer simulation. Section 6 concludes the paper.
2. Problem Statements
2.1. Target System
We consider a swarm that consists of n mobile robots on an -plane. Let be the position of robot i, be the phase as explained in Section 2.2, and be a set of neighbor robots as expressed by (1), where is a visible range.
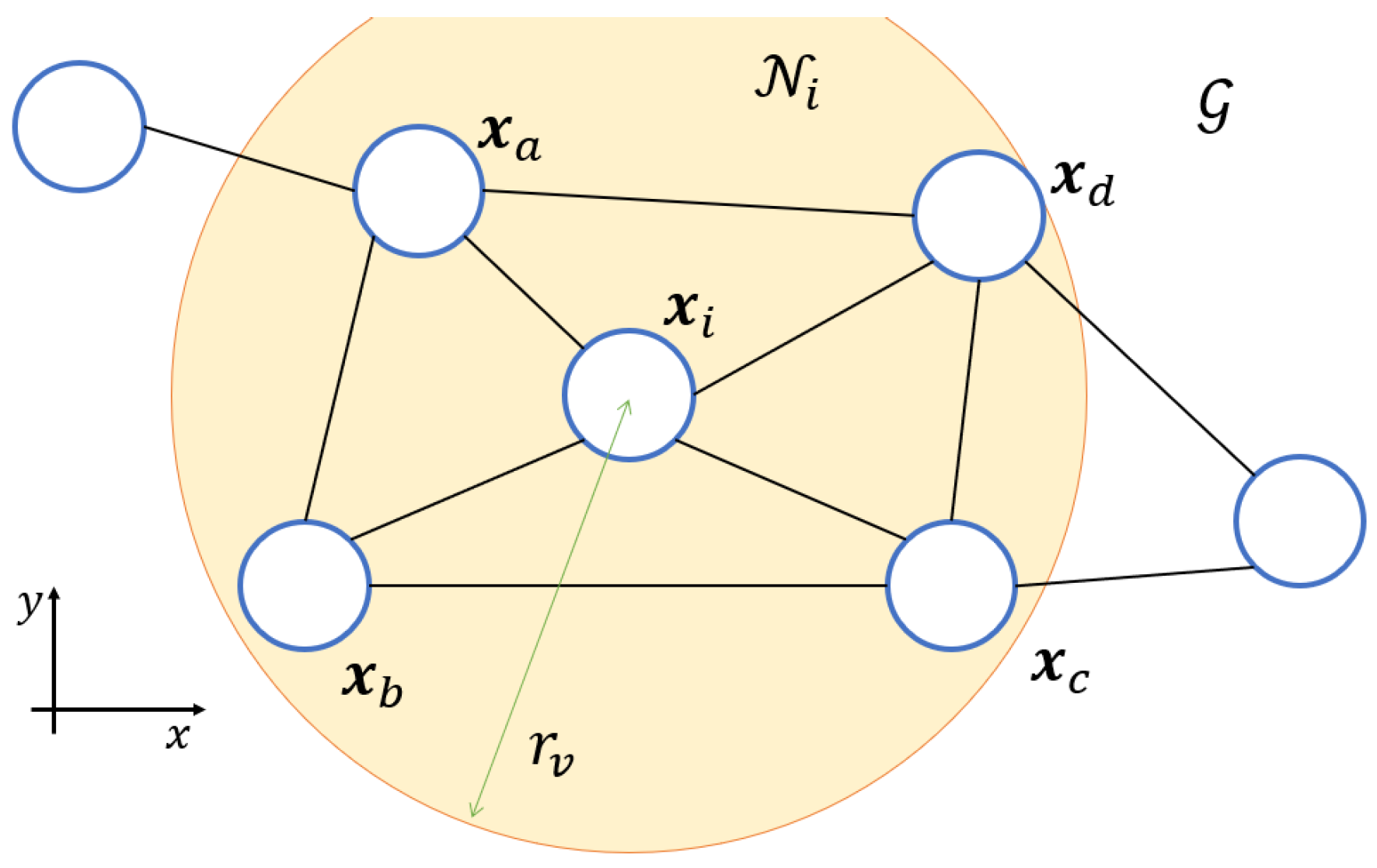
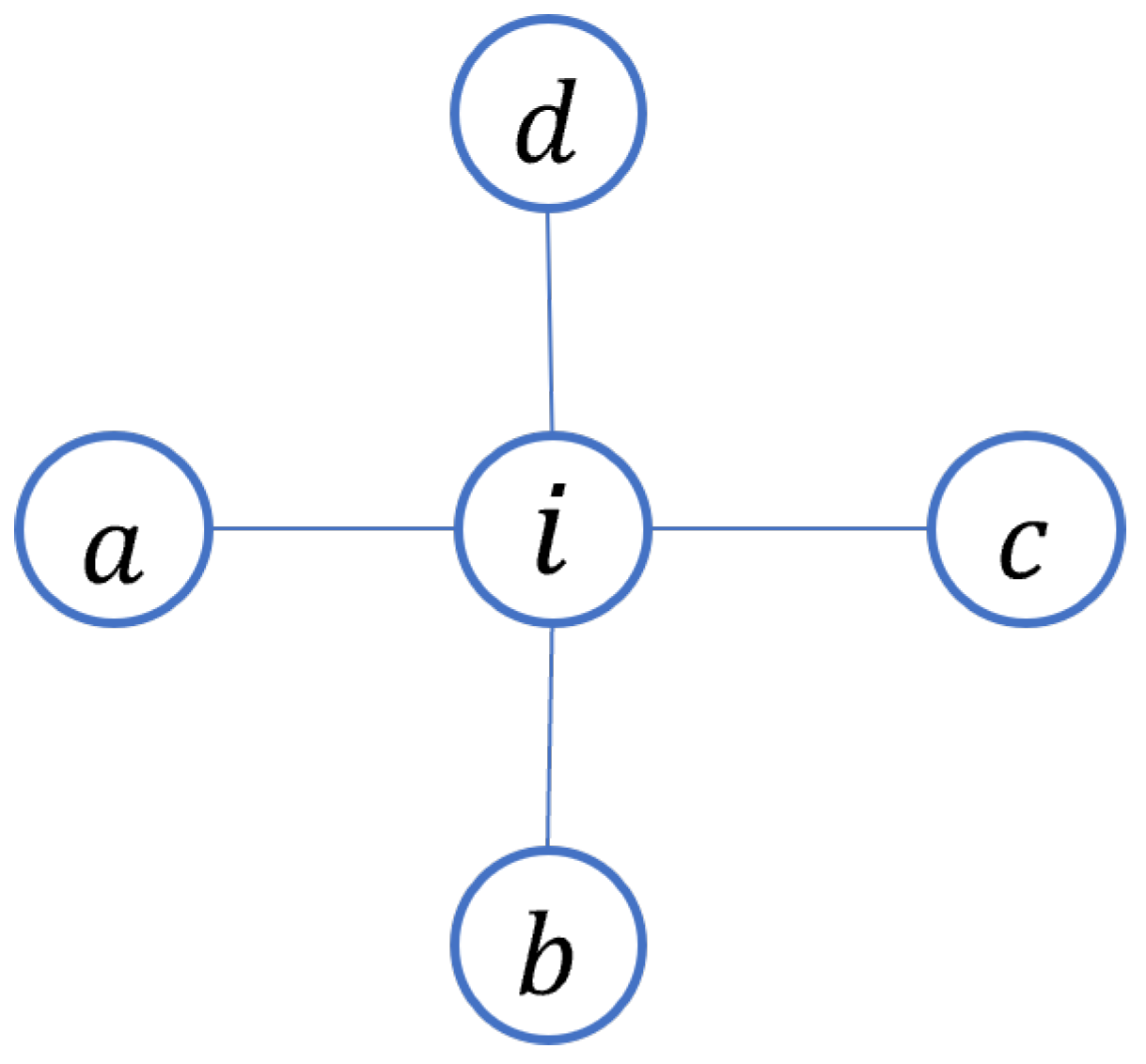
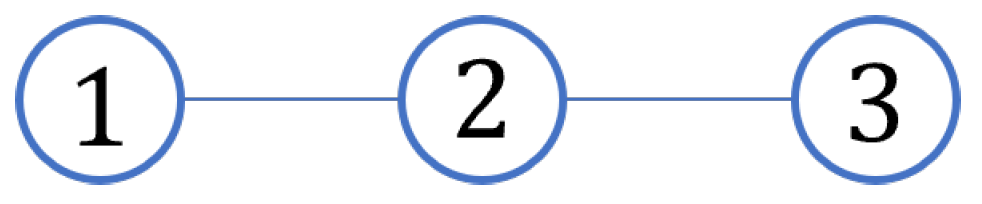
We assume that the robot can observe relative positions, velocities, and phases of the other robots in . An undirected graph that represents a local interaction network among robots in a swarm (Figure 1) is designed, of which an adjacent matrix , a degree matrix , a graph Laplacian matrix are expressed by (2) and (3).
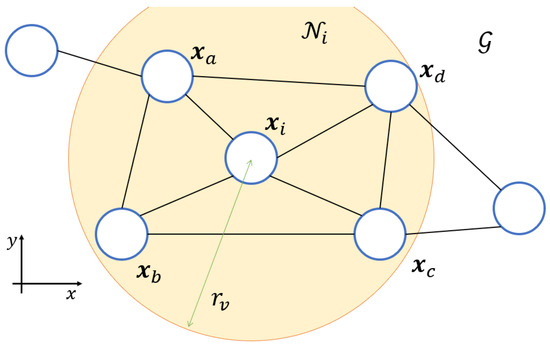
Figure 1.
Graphical representation of the model of the swarm.
Since is the undirected graph, and are symmetric matrices.
In this study, we assume that is connected. Then, is a positive semi-definite matrix and has a zero eigenvalue corresponding to eigenvector .
2.2. Coupled Oscillator System
Suppose that robot i has an artificial scalar state variable , called the phase. If we restrict and the robot updates its phase following (4), behaves as an oscillator, such as a single-hand clock.
where is the angular velocity of the oscillator.
In (5), the oscillator feedbacks the phase difference between a neighbor with a constant gain parameter . If all robots in the swarm update their phase following (5), the oscillators behave as a COS.
When , the robot phases converge to the same value, which is an average of the initial states. Next, we check this mathematically. Let , then the COS is expressed by (6). The derivation is explained in more detail in Appendix A.
Since is a real symmetric matrix, holds, where and are an orthogonal and a diagonal matrix, respectively. Suppose that (7) and (8) hold.
Let , be an eigenvalue of , equal to the -th diagonal component of . Then (9) holds.
The time development of holds (10).
Since is the semidefinite matrix and has a zero eigenvalue, converges as (11).
where we set if . is calculated from all robot phases via coordinate transformation by P. In this sense, represents the COS state on the swarm. As is a zero eigenvalue and , is an average of the phases. Therefore, (11) means that the phases converge to the same value, which is the average value of the initial states.
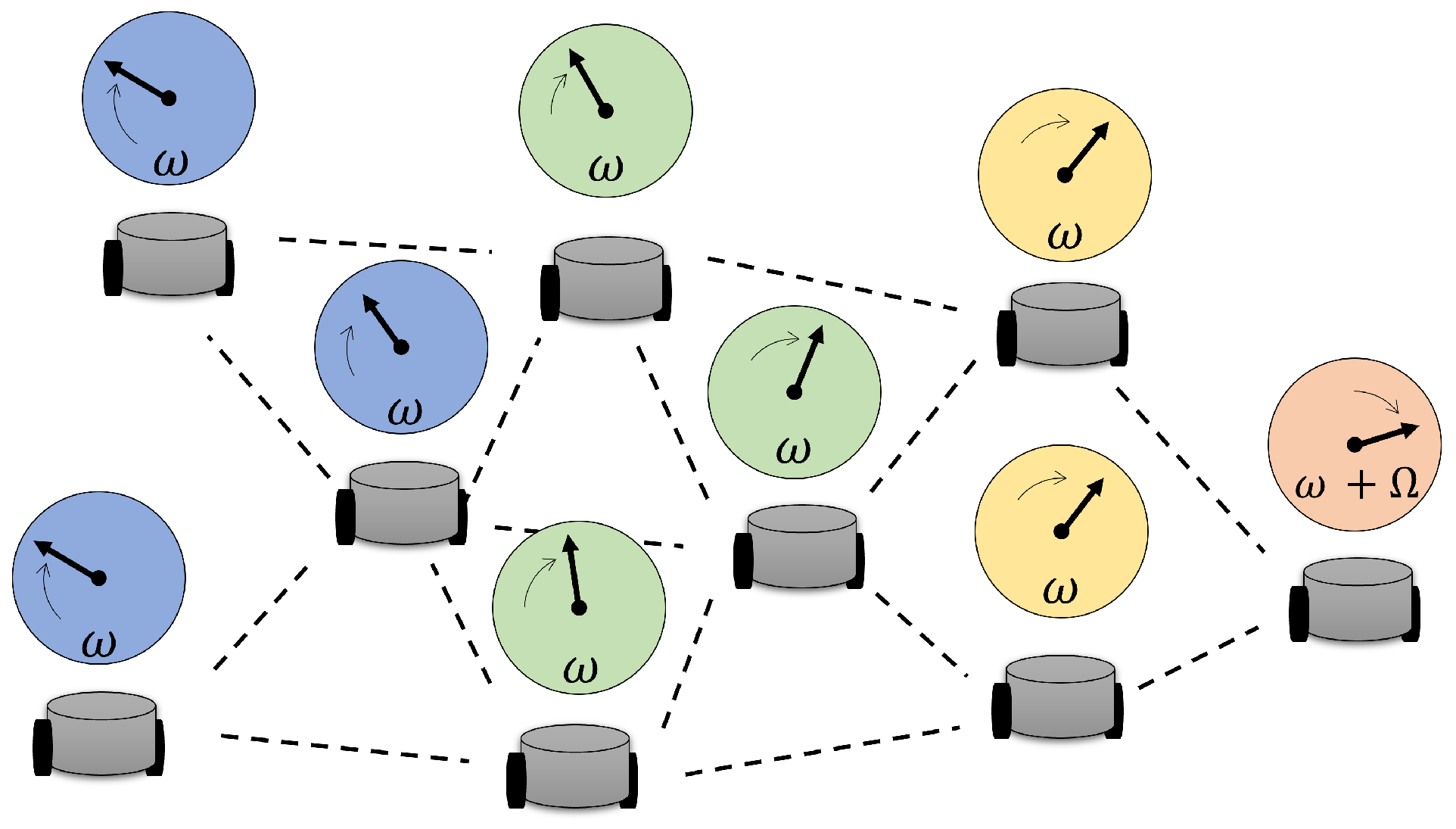
When angular frequency is not zero, the interactions generate a spatially smooth, but discrete, field. Figure 2 shows an example of the field. Clocks on the robots denote their phase value. Most of the robots have the same angular velocity . Only the right-most robot has a larger angular frequency . In this case, phases are distributed as a gradient starting from the right.
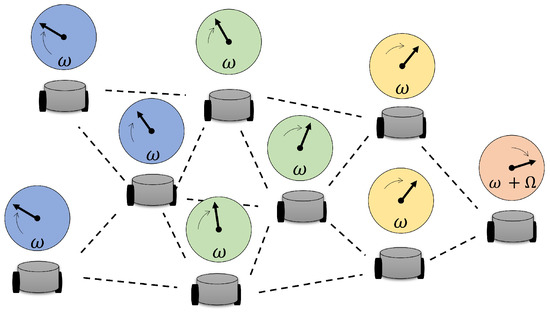
Figure 2.
Example of field generated by COS.
In a real robotic system, we can implement the COS in robots in a simple way. Consider the robots are equipped with LED and light detectors. Let robot i emit its LED when . Neighbor robot j calculates the phase difference between it and i as when it detects the light from robot i. Robot j uses the phase difference to update its phases following (5). Therefore the COS can be implemented via simple communication.
In the following section, we assume , which means that is the deviation of the original phase from . For simplicity, we also assume . These assumptions do not affect the discussion herein but need to be considered in a real system.
2.3. Problem Setting
The objective of this study is to design a method of interaction among the phases of the robots so that a robot can estimate . In other words, we propose a method of estimating the global states of a swarm only by local observations and interactions among the distributed robots.
Since includes the geometrical features of a swarm, our method contributes to the establishment of distributed controllers that can manipulate a shape or other characteristics of a swarm.
3. Geometrical Information in Phase Developments
3.1. Diffusion Interaction by COS
To analyze interaction (6) of , we introduce a continuous variable . represents a continuous field corresponding to the discrete field of created by COS. Then we compare the interaction and diffusion equation using .
Consider a continuous diffusion equation on the -plane (12), where and is a spatial Laplacian operator.
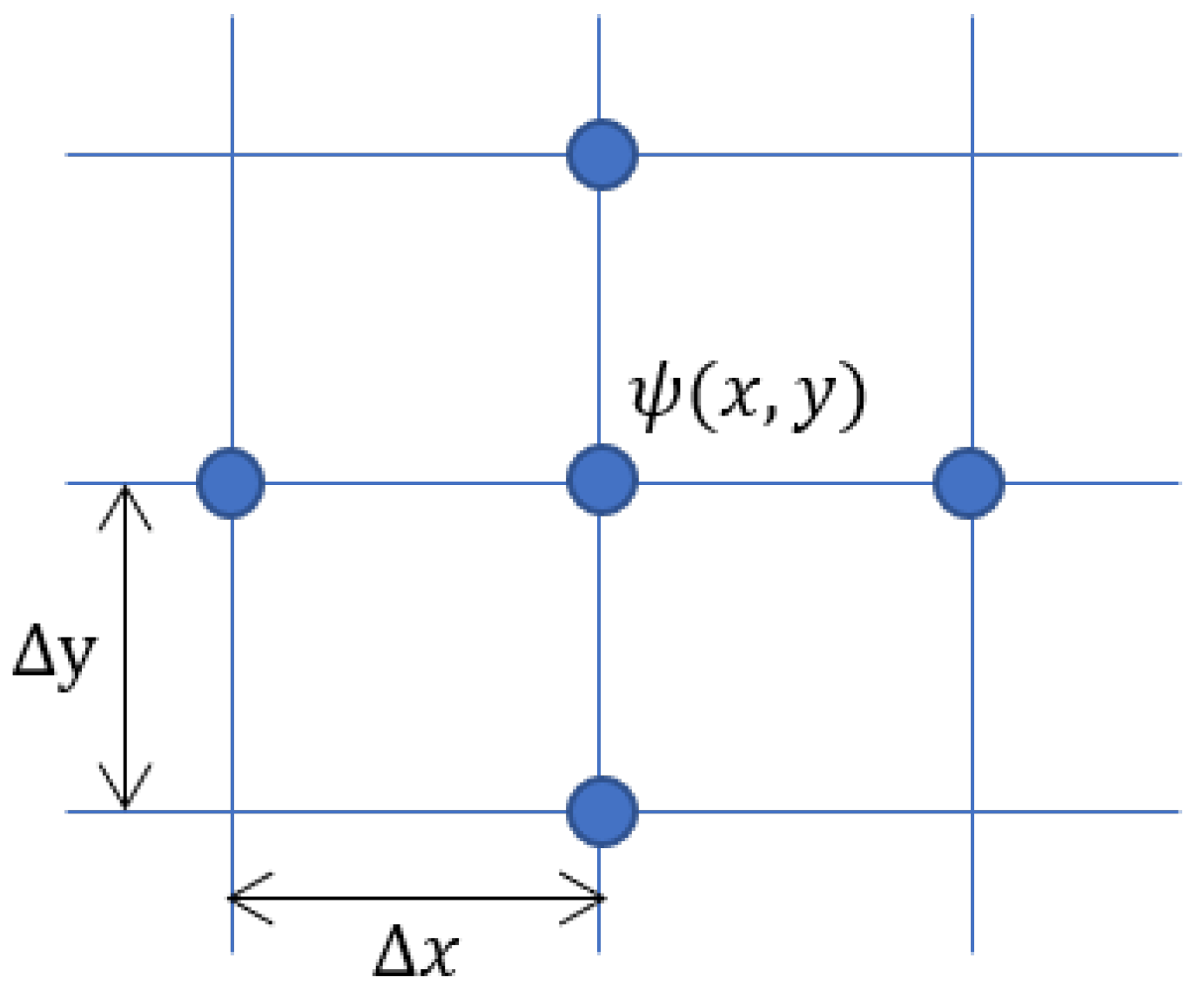
If we compute the equation with the grid points in Figure 3, the spatial Laplacian is expressed by (13).
If always holds, (12) and (13) lead to (14).
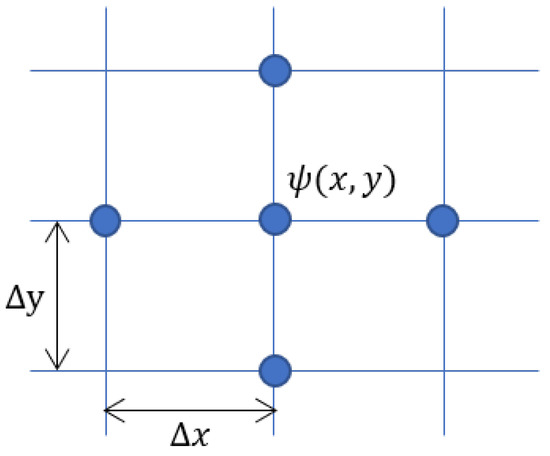
Figure 3.
Discrete calculation with grid points.
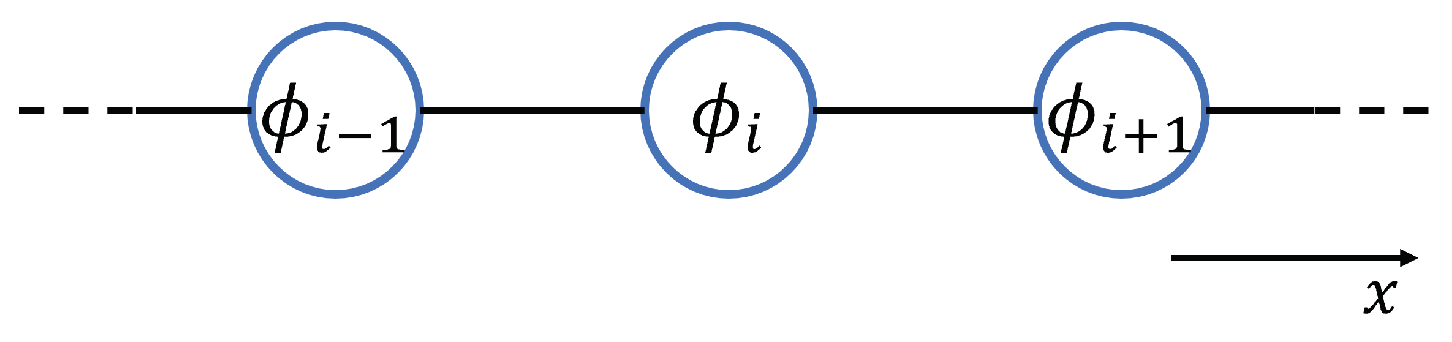
Suppose a robot i with phase whose set of neighbors includes (Figure 4). Their phase interactions based on (5) becomes (15).
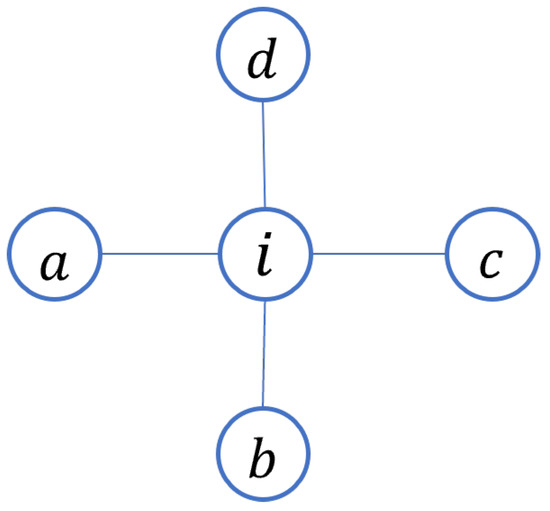
Figure 4.
Agents placed on grid-like positions.
3.2. Correspondence between Graph Laplacian and Fourier Transform
Consider applying Fourier transformation in the spatial domain (16) to solve (12), where is the state variable of spatial frequency and . For simplification, we consider (12) on the x axis. Then, satisfies (17).
We establish a similarity between (9) and (17). As the reference [16] shows, the diagonalization is equivalent to the graph Fourier transformation on graph signal processing. Table 1 summarizes the relationships among them.

Table 1.
Relation between Diagonalization Process and Fourier Transform.
According to the relationships, the eigenvalues represent the spatial frequency, which reflects the geometrical state of the swarm.
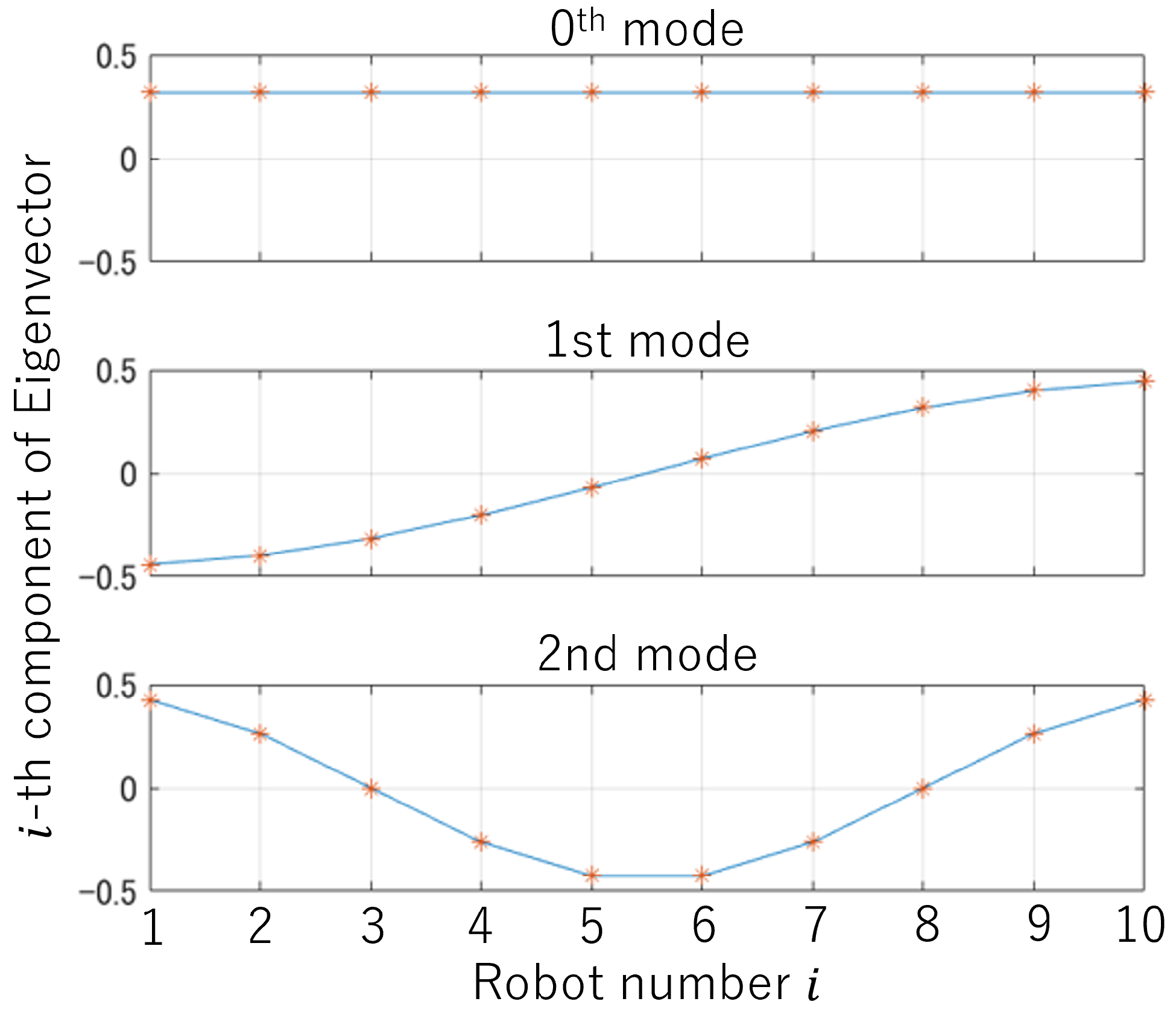
Consider a swarm that includes 10 robots where the robots are aligned in a straight line. Figure 5 shows the shapes of the eigenvectors of mode and 2, respectively. For and , the shapes of the eigenvectors are equivalent to the primary and secondary vibration modes of the continuous string. In other words, the eigenvalues or vectors reflect properties that are related to the size of a swarm.
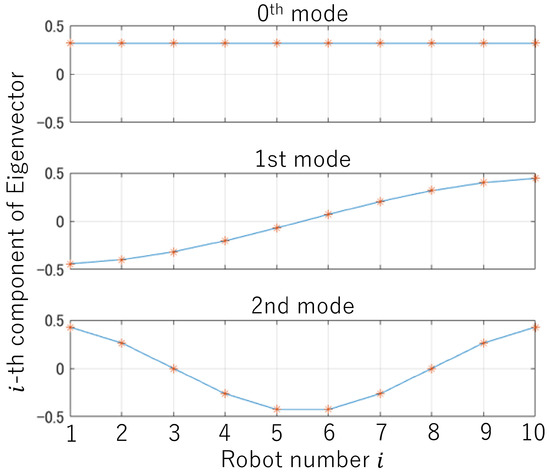
Figure 5.
Shapes of the eigenvectors of the linear swarm. The horizontal axis shows the agent number and the vertical axis shows the i-th component of the eigenvector at the agent i ().
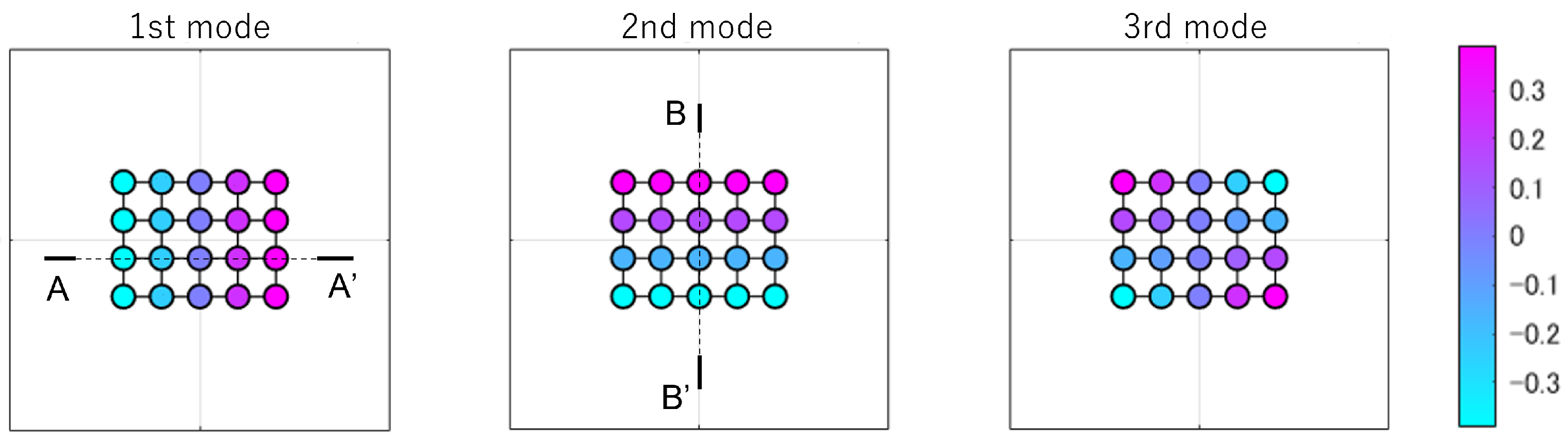
Figure 6 illustrates the distributions of the component values of the eigenvectors for mode , 2 and 3 over the 20 robots in the rectangular grid positions. The deeper color indicates a larger value. For and , the value gradually changes along the horizontal and vertical axes, respectively. If we observe the intersections of A-A’ and B-B’, we observe that the shapes of the eigenvectors as similar to those in Figure 5. For a vibration mode that has a higher spatial frequency appears.
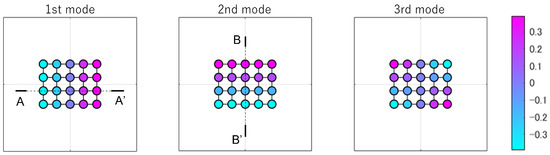
Figure 6.
Shape of eigenvectors of the 2d swarm. Colors of the agents show values of the eigenvectors at the agents.
Let be the -th eigenmode of the swarm. Since the -th eigenvalue corresponds to the spatial frequency of the modes of whole swarm, we can calculate the wavelength of the -th mode from as . For each intersection, the wavelength of the modes reflects the length along a direction. Therefore, the eigenvalues are related to the size and shape of the entire swarm.
4. Interaction Design to Estimate Eigen Values
4.1. Wave-Type Interaction
In the diffusion interaction (5), as we show in (10), the higher modes () exponentially converge to zero. This means that the robots have few chances to observe the time change depending on the higher modes. Therefore, robots in a swarm cannot estimate eigenvalues. Here, we generate a standing wave in the swarm to enable the robots to persistently observe the time change of higher modes,
We propose a wave-type interaction (18) to replace diffusion interaction (6) so that a robot can observe the eigenvalue as a dynamical response of its phase in the frequency domain. According to (18), the dynamics of the phase become (19).
The wave-type interaction corresponds to decentralized calculation of a continuous wave Equation (20) where c is the wave speed.
Applying (7) to (19), we obtain (21). Accordingly, the time development of is represented by (22), where represents a constant that depends on the initial state.
Since includes the oscillation modes, a robot can derive by observing the peak in the time-frequency domain.
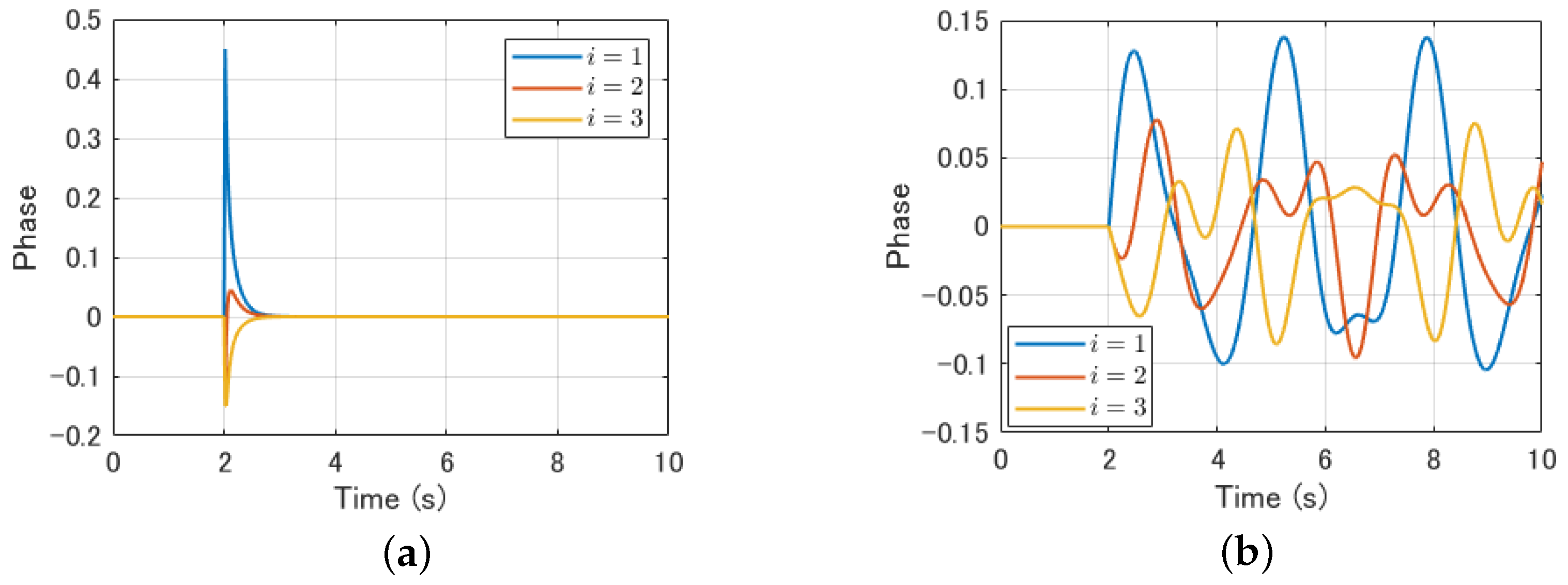
Figure 7 shows the difference between diffusion interaction and wave-type interaction.
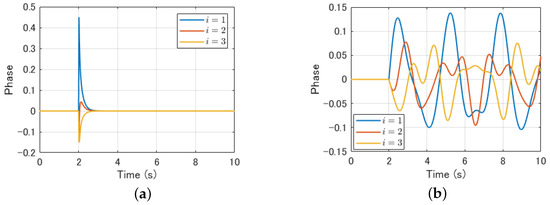
Figure 7.
Time change of phases in the interactions. (a) Diffusion interaction; (b) wave-type interaction.
We placed three robots on a straight line (Figure 8) and the leftmost robot () oscillates phase as impulse at (s). In diffusion interaction Figure 7a, phases immediately converge to same value. Robots can not obtain the information related to the oscillation modes after (s). On the other hand, the phases oscillate continuously in a wave-type interaction as seen in Figure 7b. Therefore, robots can persistently estimate the eigenvalues from the oscillation frequency of the phase.
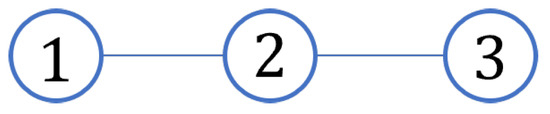
Figure 8.
Three agents placed on a line.
4.2. Design of Parameter
The constant parameter works as the interaction gain in (18). To determine the appropriate value of , we need to consider both estimation accuracy and stability.
4.2.1. Estimation Accuracy with a Parameter
The wave-type interaction has the parameter . When we design the interaction within a swarm, we set the value of the parameter. Here, we discuss the characteristics and the range of value of required to stabilize the interaction.
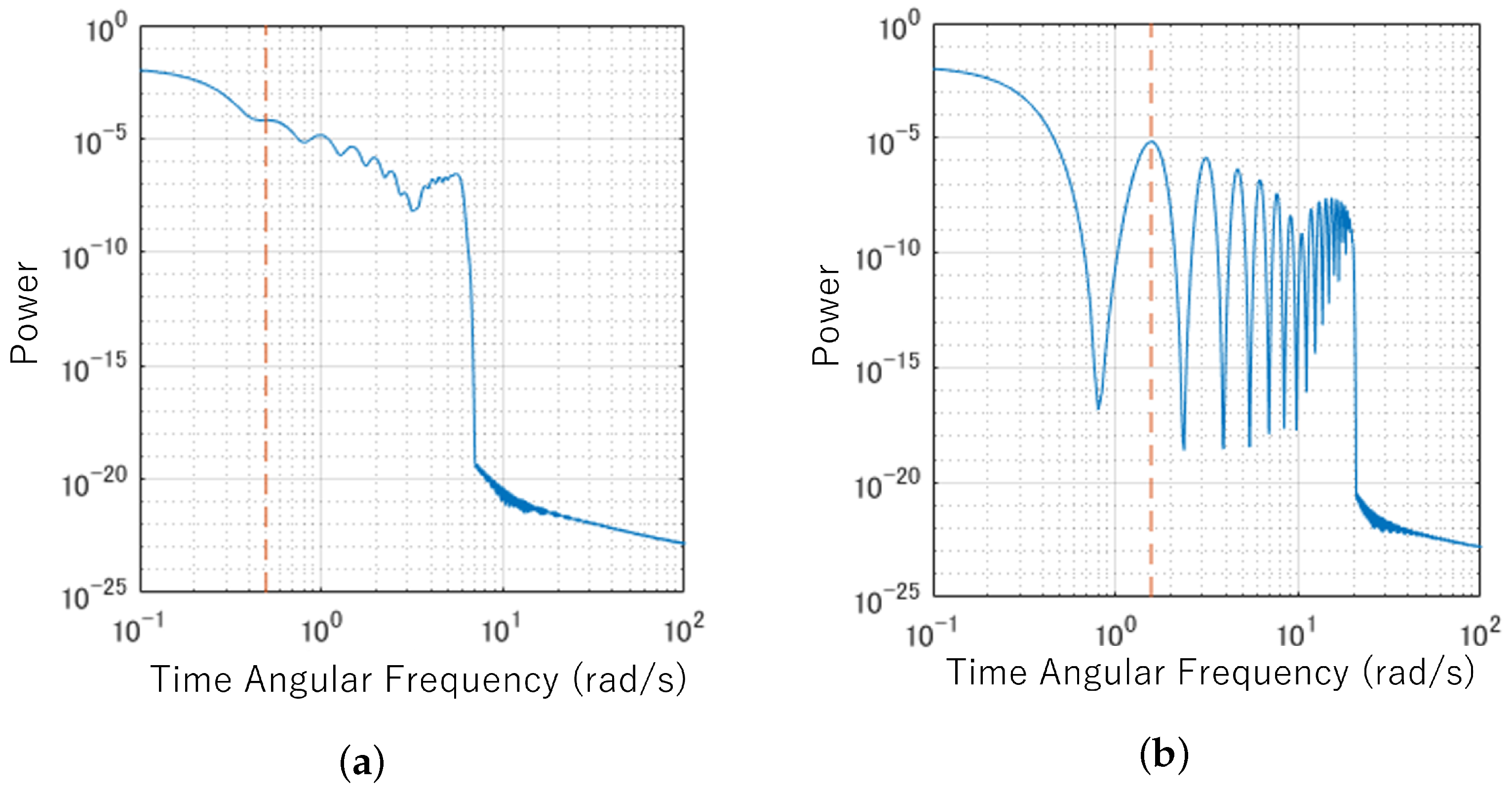
Comparing wave-type interaction (18) and the continuous wave Equation (20), is equivalent to the square of the wave speed c. Thus, affects the accuracy of peak detection in the time-frequency analysis. Figure 9 shows examples of the power spectrums of the phase observed by an agent in a swarm, which consists of 20 agents aligned in a straight line. The orange dotted line indicates the frequency of the primary mode. In the case of Figure 9a, where , the peaks of the power spectrum are less significant than those in Figure 9b, where .
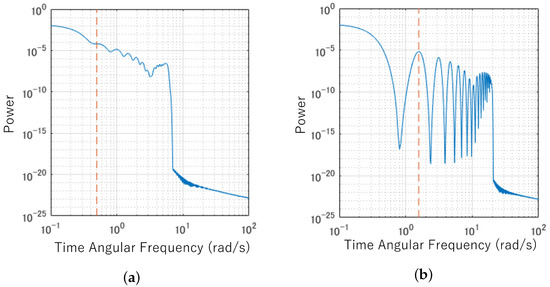
Figure 9.
Power spectrum of phase with different . The orange dotted line shows the time-frequency of the first peak. (a) ; (b) .
Since the larger (faster wave speed) results in an increase in the number of waves detected in a certain time window, the peaks of the power spectrum become significant for and the signal-to-noise ratio improves. A large value promotes the accuracy of .
4.2.2. Stability
To implement the wave-type interaction in simulations or real robot systems, we must discretize the Equation (18) in the time domain. Consider a swarm in which the robots are aligned in a line (Figure 10). Based on the central difference method, we obtain (24), where denotes a time step. Note that we have assumed unit distances between the agents, that is, is 1.
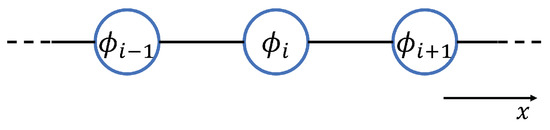
Figure 10.
Setting of the stability analysis.
We employed the von-Neuman stability analysis method that is used in finite element computation. Let be composed of the products of temporal and spatial developments, () and , as (25). If holds for all , the system is stable.
Since , we obtain (27).
One of the solutions of (29) is , which denotes no oscillation. Other solutions rely on , whose solutions are
If , holds as (31), but it does not if .
Therefore, to satisfy the stability condition, we must set lower than .
As a result of the discussions, there is a trade-off about setting the value of . The time step depends on the components of the control unit of a robot. In general, a high-performance device allows small and accepts large .
Despite considering an undamped system in the above discussion, we can improve the stability of the system by adding a small damping term to the interaction. In terms of signal detectability, we want to set the damping factor as small as possible because the damping factor attenuates the signal over time. Inequality (32) is a sufficient condition for a stable calculation with a small damping oscillator.
5. Decentralized Detection of the Deformation of the Swarm
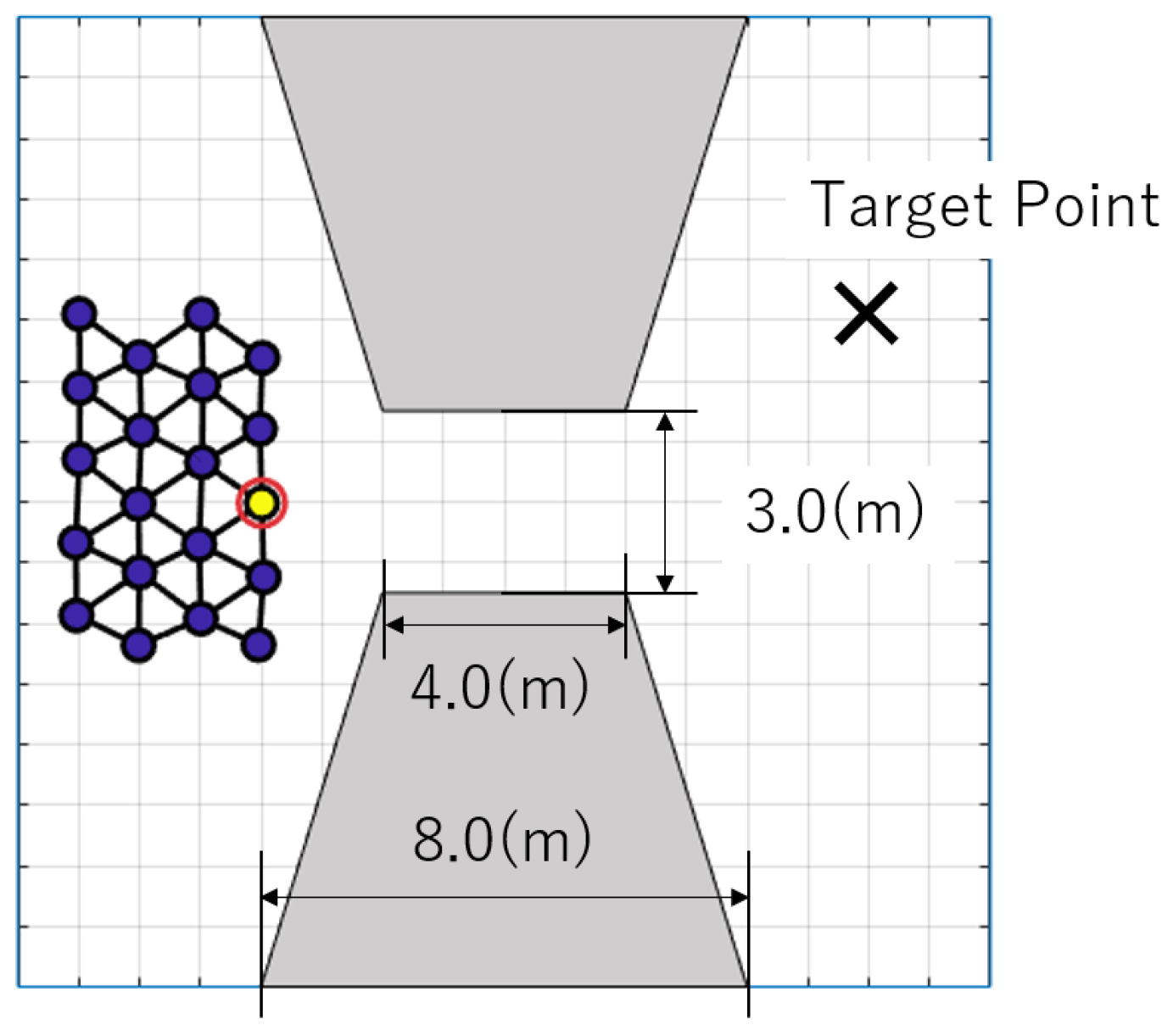
We verified the effect of the proposed method through simulation. Suppose that the swarm is composed of 20 robots. The swarm is expected to go to the target position indicated in Figure 11. We applied the control method [17] to navigate it. Between the initial and target positions, two obstacles exist. Thus, the swarm needs to deform its shape when passing through the narrow area between the obstacles.
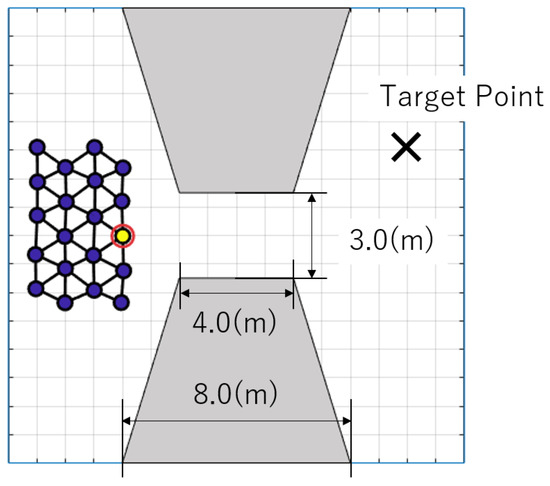
Figure 11.
Simulation field and initial position of the agents [17].
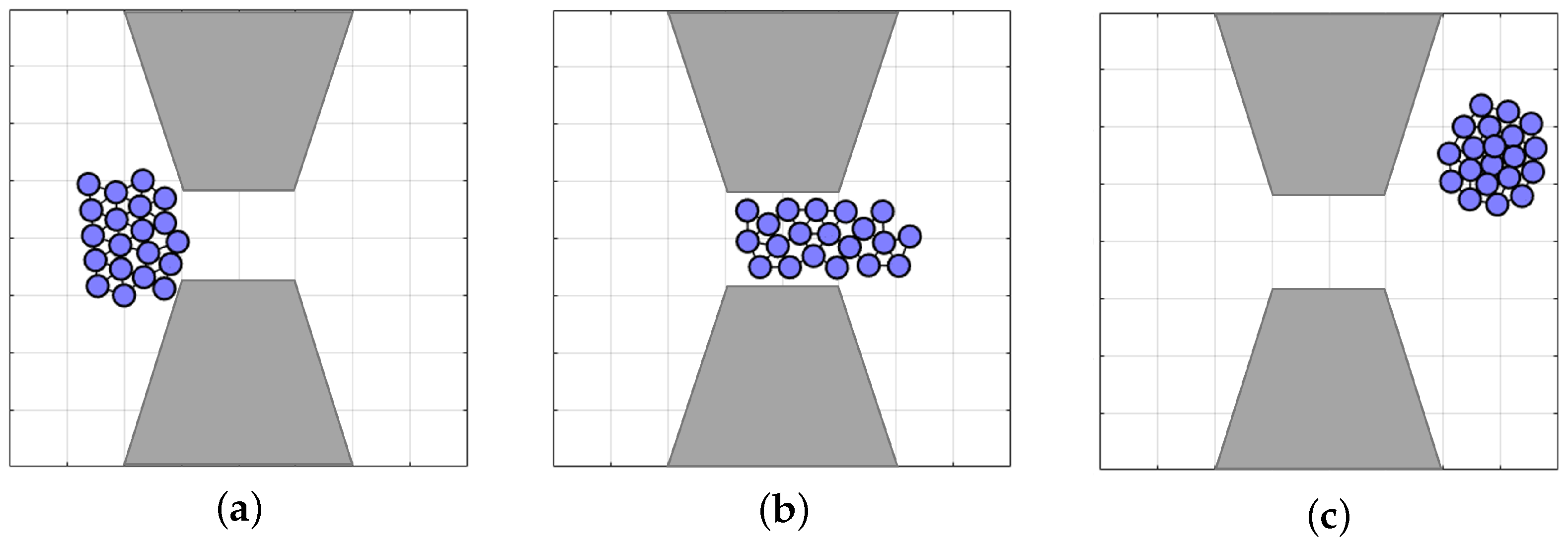
Figure 12 provides snapshots of the movement of the swarm.
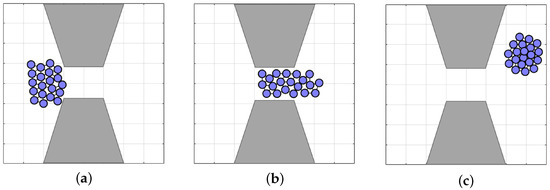
Figure 12.
Swarm passing through the narrow space [17]. (a) t = 10 s; (b) t = 40 s; (c) t = 80 s.
We implemented the wave-type interaction so that a robot in a swarm can estimate the longitudinal direction l of the swarm by observing the frequency of the primary mode (33).
We used MATLAB 2021b for the simulation. Table 2 shows the parameter settings for the simulation.
Table 2.
Parameter specifications.
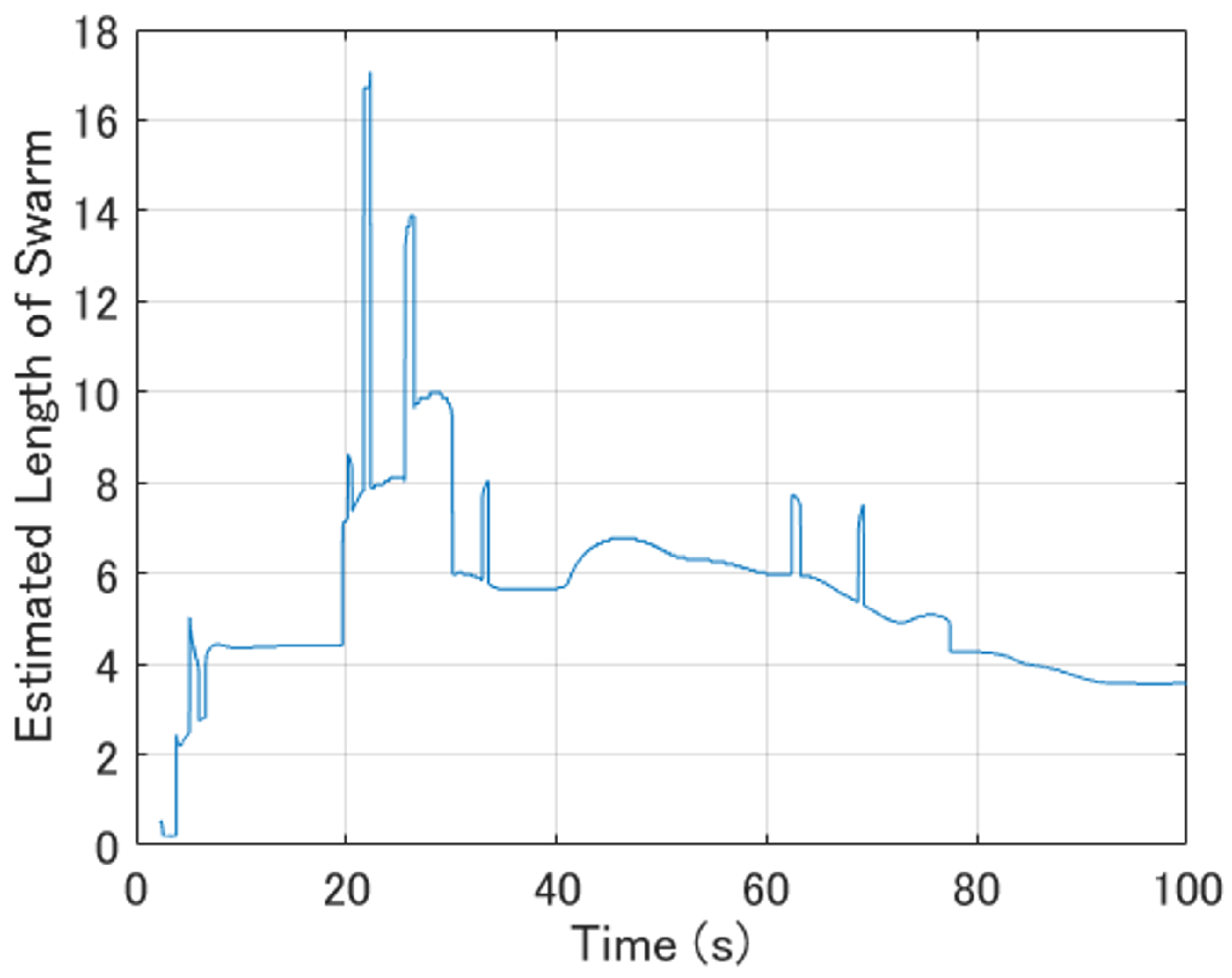
Figure 13 shows the result of the estimated longitudinal length l of the swarm during the simulation. The estimated l is computed using (33) and is not necessarily an integer. Before s, there is noise because the robot does not have enough data for detecting peaks. At approximately to 20 s, the estimated l was almost constant at a value of 4, because it was located in the free space and formed a circular shape. Around 40 to 60 s, the estimated l increased to 6 or more, because the swarm was passing through the narrow space and the shape was squeezed horizontally as seen in Figure 13. After 60 s, the estimated l gradually decreased toward 4, as it moved into the wide free space again and its shape gradually returned to the circular once again.
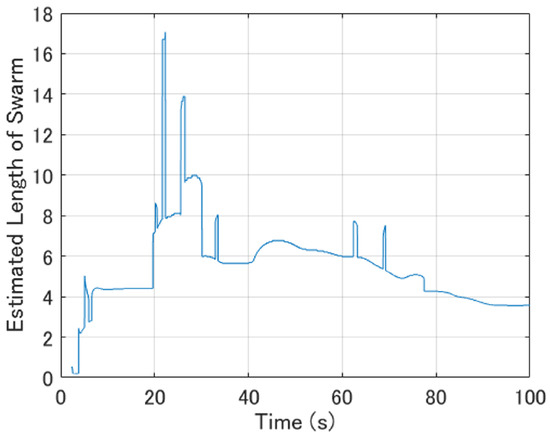
Figure 13.
Results of the simulation of the size estimation of the deforming swarm.
In the simulation results at approximately 20 to 40 s, the estimated l varied, because the topology of the local interaction network was dynamically changed due to collision avoidance with the obstacles. The authors are aware that they should improve the proposed method to stabilize the estimated results.
As a result, a robot could detect the deformation in the shape of the swarm only by using local interactions proposed by the authors. We expect that if we use the estimated result to control, then the swarm can tune its characteristics for collision avoidance by adapting to the change in environment.
6. Conclusions
We proposed a wave-type interaction so that an autonomous robot in a swarm can estimate global geometric states only by using local observations and interactions. We introduced a scalar state variable called phase into a robot, which is manipulated by local interactions with its neighbors. We analyzed the properties of the local interaction network among robots in a swarm and showed the relationships between the eigenvalues, eigenvectors, and geometrical states of a swarm. We then replaced diffusion interaction with wave-type interaction so that a robot can calculate the eigenvalues of a swarm by observing phase behavior in the frequency domain. We also examined the feasible range of , the parameter for interactions. Theoretically, a large benefits the accuracy of estimation. However, according to von-Neumann stability analysis, a small makes the system stable. We must set the parameter by considering a trade-off.
We carried out a simulation in which a swarm of 20 robots passed through a narrow space between obstacles. We showed results of the estimated size of the swarm by a robot in a swarm using local interactions only. Yet some parts of the results were disturbed by noise, and the proposed system estimated the change in size correctly. In other words, a robot in a swarm can identify the deformation in the shape of a swarm only via local interactions.
In this study, we proposed a method to estimate the global geometric states by local observations and interactions only. In future work, we will apply the proposed method to the development of an advanced swarm control method. Furthermore, we will consider the relationship between the swarm structure and the time period required for estimation.
Author Contributions
Conceptualization, Y.O. and D.K.; Funding acquisition, Y.O.; Writing—original draft, Y.O.; Writing—review & editing, D.K. All authors have read and agreed to the published version of the manuscript.
Funding
This study was partially supported by JSPS KAKENHI under grants 22H01440, 22J22440, and the SSUP program of Sony Semiconductor Solutions Corporation.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Bayindir, L. A review of swarm robotics tasks. Neurocomputing 2016, 172, 292–321. [Google Scholar] [CrossRef]
- Izumi, S.; Azuma, S.I.; Sugie, T. Multi-Robot Control Inspired by Bacterial Chemotaxis: Coverage and Randezvous vi Networking of Chemotaxis Controllers. IEEE Access 2020, 8, 124172–124184. [Google Scholar] [CrossRef]
- Shimoyama, N.; Sugawara, K.; Mizuguchi, T.; Hayakawa, Y.; Sano, M. Collective Motion in a System of Motile Elements. Phys. Rev. Lett. 1996, 76, 3870–3873. [Google Scholar] [CrossRef] [PubMed]
- Sugawara, K.; Hata, K. Interactive Flocking Simulator based on Deterministic Kinetic Model. In Proceedings of the ICROS-SICE International Joint Conference, Fukuoka, Japan, 18–21 August 2009. [Google Scholar]
- Sakai, D.; Fukushima, H.; Matsuno, F. Leader–Follower Navigation in Obstacle Environments While Preserving Connectivity Without Data Transmission. IEEE Trans. Control Syst. Technol. 2018, 26, 1233–1248. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. Comput. Graph. 1987, 21, 25–34. [Google Scholar] [CrossRef]
- Pimenta, L.C.A. Swarm Coordination Based on Smoothed Particle Hydrodynamics Technique. IEEE. Trans. Robot. 2013, 29, 383–399. [Google Scholar] [CrossRef]
- O’Keeffe, K.P.; Hong, H.; Strogatz, S.H. Oscillators that sync and swarm. Nat. Commun. 2017, 8, 1504. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, K.; Tsukidate, T.; Nakada, T.; Shimizu, M.; Ishiguro, A. Self-assembly through the Local Interaction between “Embodied” Nonlinear Oscillators with Simple Motile Function. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008. [Google Scholar]
- Hayakawat, T.; Matsuzawat, T.; Harat, S. Formation Control of Multi-Agent Systems with Sampled Information—Relationship Between Information Exchange Structure and Control Performance. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 4333–4338. [Google Scholar]
- Cui, R.; Ge, S.S.; How, B.V.E.; Choo, Y.S. Leader–follower formation control of under actuated autonomous underwater vehicles. Ocean Eng. 2010, 37, 1491–1502. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Kyriakopoulos, K.J. On the Rendezvous Problem for Multiple Nonholonomic Agents. IEEE. Trans. Autom. Control 2007, 52, 916–922. [Google Scholar] [CrossRef]
- Kurabayashi, D.; Choh, T.; Cheng, J.; Funato, T. Adaptive Formation Transition among a Mobile Robot Group based on Phase Gradient. J. Robot. Mechatron. 2009, 22, 467–474. [Google Scholar] [CrossRef]
- Horayama, K.; Kurabayashi, D.; Ahmad, S.; Hashimoto, A.; Moriyama, T.; Choh, T. Guidance of Robot Swarm by Phase Gradient in 3D Space. In Proceedings of the International Conference on Intelligent Robotics and Applications, Tokyo, Japan, 22–24 August 2016; Volume 9834. [Google Scholar]
- Hammond, K. Wavelets on graphs via spectral graph theory. Appl. Comput. Harmon. Anal. 2011, 30, 129–150. [Google Scholar] [CrossRef]
- Origane, Y.; Hattori, Y.; Kurabayashi, D. Control Input Design for a Robot Swarm Maintaining Safety Distances in Crowded Environment. Symmetry 2021, 13, 478. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).