1. Introduction
GPFDEs (Generalized Proportional Fractional Differential Equations) are a form of mathematical equation that describes the temporal evolution of a system using fractional derivatives of non-integer order. These equations are used to simulate a wide range of physical and biological phenomena, such as anomalous diffusion, fractional oscillators, and aging processes. GPFDEs are broader than classical differential equations and can describe systems with memory and non-local interactions more accurately. In [
1], the authors have introduced a revolutionary fractional derivative. This new derivative, dubbed the “Generalized Proportional Fractional Derivative (GPFD)”, retains the semigroup feature while embracing its nonlocality. As a result, under limiting cases, it easily transitions from the original function to its derivative, as seen in [
2]. A fractional derivative with a non-singular kernel function and a non-local operator is known as a GPFD. When compared to traditional derivatives such as the integer-order derivative and the Caputo Fractional Derivative (CFD), it is a more generic and versatile tool for describing complicated processes. GPFD is very beneficial for dealing with memory and non-locality systems, such as diffusion processes, viscoelasticity, and anomalous transport. Furthermore, the GPFD allows for the consideration of varying order derivatives, allowing for the capture of various degrees of smoothness or roughness in the underlying signal. Overall, the GPFD is an effective tool for modeling and evaluating complex systems in physics, engineering, and finance [
3,
4,
5].
State Feedback Controller Design for Nonlinear Systems, on the other hand, is a hard and active topic of study in control systems engineering. Because of nonlinearities, uncertainties, and disturbances, nonlinear systems display complicated behaviors and are frequently difficult to manage. Numerous research has been conducted in recent years with the goal of establishing state feedback control techniques for nonlinear systems. Refs. [
6,
7,
8,
9] are some recent references on this subject. These references highlight current attempts to create nonlinear state feedback control techniques. Ref. [
6] offers a state-feedback control technique for nonlinear systems based on adaptive dynamic programming and feedback linearization. Ref. [
7] provides an adaptive state-feedback control approach for nonlinear systems with time-varying delay, whereas [
8] develops a state-feedback control technique for nonlinear neural network systems. These recent breakthroughs in state feedback control design for nonlinear systems emphasize ongoing research efforts in this subject and the creation of new and improved control techniques for solving nonlinear system difficulties. In [
9], the authors have suggested an LMI-based study about state feedback stability for Lipschitz uncertain systems, with time delay. On the other hand, some other works have focused on output feedback control, rather than state feedback control. This is the case in [
10], where the authors have investigated the output-tracking problem of high-order time-delayed nonlinear systems. Another interesting work [
11] has tackled the output feedback control problem for uncertain linear systems, using the separation principle.
Stabilization has gained a lot of attention in recent years when it comes to Fractional Order Nonlinear Systems (FONSs). Fractional calculus has shown to be a useful tool for modeling complicated systems, with numerous applications in physics, engineering, and biology. In a noteworthy study [
3], the authors have investigated the stability of a class of Fractional-Order delayed artificial neural networks. Control and design of FONSs rely heavily on stability analysis. Several strategies for stabilizing FONSs have been presented in recent years. One of the most recent references is Zhang et al. [
12], where the authors proposed a sliding mode control technique for the stabilization of fractional order chaotic systems. The authors conducted a theoretical study of fractional order chaotic system stability and demonstrated that the suggested sliding mode control rule may successfully stabilize the system. Another recent reference is the work of Liu et al. [
13], which presented a backstepping control approach for the stabilization of FONSs with uncertainties. The authors formulated necessary requirements for the stability of FONSs and demonstrated that the suggested backstepping control rule may successfully stabilize the system even when uncertainties exist. In a noteworthy study, Wang et al. [
14] suggested a fuzzy control approach for the stabilization of FONSs with uncertainties in their study. The authors performed a stability analysis of FONSs and demon strated that the suggested fuzzy control rule may successfully stabilize the system even when uncertainties exist. The recent paper [
15] investigated the synchronous control of a class of fractional chaotic systems. In the end of this paragraph, it is important to highlight that more study is needed to solve the issues of FONS stabilization and to create more efficient control approaches. Finally, in [
16], the authors have tackled the synchronization of a class of Fractional-Order delayed artificial neural networks.
Some criteria may be taken into account while stabilizing nonlinear systems. Regarding the linearity aspect, writers typically utilize the nonlinear Lipschitz condition or the One-sided Lipschitz (OSL) condition. The OSL system class is a large category of nonlinear systems. The OSL constant can be smaller than the Lipschitz constant, and this difference can have a major influence even in basic nonlinear systems [
17,
18,
19]. The importance of the OSL condition arises from its capacity to ensure the stability of nonlinear systems. This condition establishes constraints on the system’s behavior, allowing predictions and preventing instability. The OSL condition is frequently used in the field of control and optimization because it provides a helpful tool for constructing stable nonlinear control systems. Furthermore, the combination of fractional order modeling with the OSL condition can improve the stability of nonlinear systems, making it a viable alternative for dealing with complicated control and optimization issues. The OSL condition is a feature of particular functions that can provide varied benefits in specific applications. The advantages of the OSL class of systems include, first and foremost, a broader range of systems than the standard Lipschitz category. Second, =algorithm convergence should be considered: because many optimization techniques rely on the Lipschitz continuity of the gradient or Jacobian function to ensure convergence, the OSL condition can help ensure the convergence of these algorithms.
The combination of the OSL class of systems with the Generalized Proportional (GP) Fractional Order modeling to solve the stabilization challenge for a wide variety of FONSs is this work’s main contribution. No previous study, to the best of our knowledge, has addressed the state feedback control problem for Generalized Proportional FONSs.
2. Preliminaries and System Description
In this part, the basic Definitions and Lemmas are presented, as well as some Remarks related to the GPFD and the Generalized Fractional Proportional Integral (GFPI).
Thus, we remember that the GP fractional operators of the function
, are defined as follows (see [
20]):
- -
- -
The GPFD:
where
.
The previous equation defines the GPFD as an extension of the CFD ().
Lemma 1 [21]. Let and be a constant and symmetric, definite positive matrix. Then,
Definition 1 [2]. The Mittag-Leffler (ML) functions can be defined with one or two parameters, respectively, as follows:
Definition 2 [22]. Let and.
The equilibrium point of (*) is called GML stable if such that for of (*), the inequality.is satisfied, where is the ML function with one parameter,
, is a given locally Lipschitz function. Lemma 2 [9,10]. (Schur Complement Lemma): Given constant matrices and , of appropriate dimensions, where and are symmetric, then:
Lemma 3 [20]. For any matrices and and any the following is true:
Talking about nonlinearity, most of published research works use the classical Lipschitz nonlinearity (given in Definition 3). In this work, we rather assume that the system nonlinearity verifies the OSL condition and the “Quadratically Inner Bounded” condition, as detailed in the next lines.
Definition 3. A nonlinear function is a Lipschitz in with a Lipschitz constant , i.e.,
Assumption 1. The nonlinear function is OSL in with a OSL constant , i.e.,
Assumption 2. The nonlinear function is Quadratically Inner Bounded (QIB) in , i.e.,
This study focuses on the examination of the nonlinear fractional order system presented below:
where
,
, and
.
are assumed to be known constant matrices. Additionally, it is supposed that
is stabilizable and
.
4. State Feedback Controller Design for OSL Fractional Order Nonlinear System
In this section, the nonlinear part is assumed to be OSL and QIB satisfying conditions (2) and (3). The same state feedback controller is proposed (5).
The following Theorem shows our main result for this section:
Theorem 2. One considers the system (4). Under conditions (2) and (3), the control law (5) stabilizes system (4) if there exist matrices , and positive scalars and
, such that the following LMI holds:
where and , and .
Proof. Let: . Using (4), (5), and Lemma 1, and substituting by , we obtain:
From (2), it follows that, for any
:
From (3), we receive for any
:
Using (12)–(14), it can be concluded that:
Let
If
, then:
. Then, using Corollary 2 in [
16],
is GML stable.
By multiplying (16) on the left and on the right by
, we can find:
Let
and
. Then (16) will become:
Using Lemma 2, (18) is equivalent to:
This ends the proof. □
Remark 2. Theorem 2 introduces a significant expansion of the scope covered by Theorem 1. In particular, the class of systems considered in Theorem 2 is broader than the initial class in Theorem 1. Furthermore, the chosen class pertains to OSL nonlinear systems. Moreover, the extension of the feedback control law to encompass the class of Generalized Proportional Fractional order nonlinear systems is distinctive and has not been addressed in the existing literature.
5. Simulation Results
This section includes a simulation study featuring a numerical illustrative example, which aims to verify the effectiveness of the suggested method for stabilizing the proposed class of FONSs. The system presented in Equation (4) can be described as follows:
By setting
, and
, conditions (2) and (3) are adequately met. We utilize the MATLAB LMI toolbox to solve the LMI (11), which yields the following outcome:
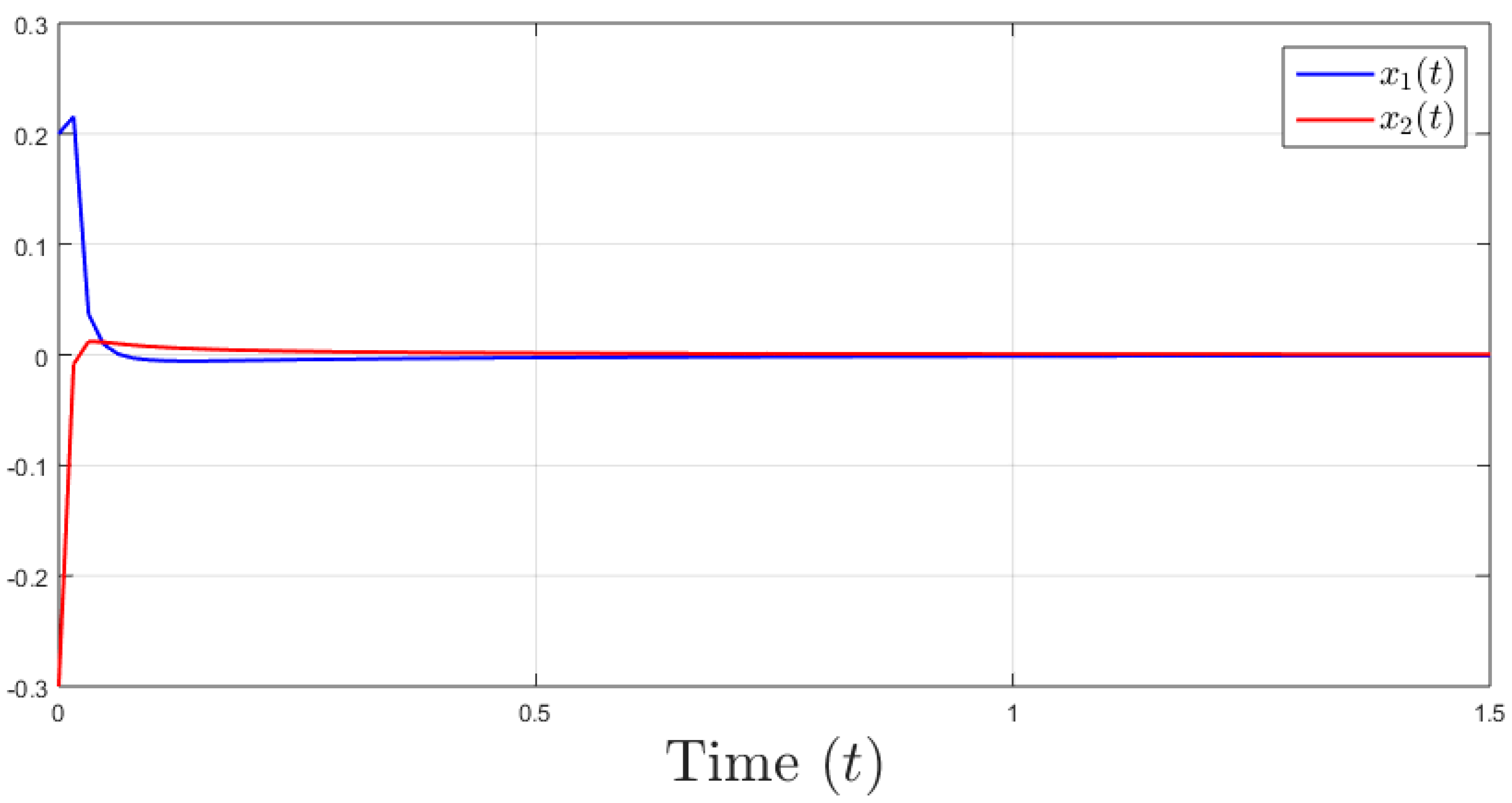
The simulation is initialized with the condition
. Using different values of
and
, we have generated simulations of the trajectories of
and
for the interval
, with a time step of
. These simulations are visually represented in
Figure 1,
Figure 2,
Figure 3 and
Figure 4.
The figures presented, namely
Figure 1,
Figure 2,
Figure 3 and
Figure 4, showcase the convergence of the system states towards zero with various values of
α and
λ. Specifically, the Mittag-Leffler convergence of the system states is observed through these figures. The results presented in the figures provide strong evidence for the efficacy of the proposed control approach.
6. Conclusions
In this work, a state feedback controller has been designed for a category of GPFO Nonlinear Systems. The design has been based on the integration of the OSL class of systems and GPFO modeling. This study aims to stabilize a broad range of fractional order nonlinear systems, which has not been tackled in prior research. The stabilization method has been designed to guarantee the GML stability of the system and achieve desirable performance. The outcomes of this work showcase the feasibility and efficiency of the suggested approach in stabilizing GPFO nonlinear systems. To guarantee the practicality of the proposed theoretical results, an illustrative numerical example has been presented. As a future outlook, this work can be expanded to include other control techniques such as fuzzy control, sliding mode control, backstepping control, etc. Furthermore, the inclusion of a practical example would offer an opportunity to showcase the real-world applicability of our theoretical framework, enabling practitioners to witness firsthand its effectiveness in solving practical problems. Moreover, incorporating a practical example in future research endeavors would not only serve as a means of validating our theoretical findings but also facilitate the identification of potential challenges, limitations, and avenues for further improvement, ultimately enhancing the practical value and impact of our work.



 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}



