1. Introduction
In order to gain high optical transmission efficiency, soft X-ray and vacuum ultraviolet optical systems are often used for grazing-incidence design structures and are widely used for synchrotron radiation source devices, microscopes and so on [
1]. Its ray is emitted from an object point impinged on the optical surface with a large incidence angle (usually larger than 80°); therefore, its imaging performance differs from that of an axisymmetric optical system, but it has the imaging characteristics of a plane-symmetric optical system. And the aberration analysis method of axisymmetric optical systems cannot be used in imaging calculations for these kinds of optical systems [
2]. This is because the aberration of soft X-ray and vacuum ultraviolet optical systems is usually very serious, and thus many methods have been proposed for analyzing the imaging of optical systems in the past few decades [
3,
4,
5,
6,
7,
8]. As soft X-ray and vacuum ultraviolet optical systems become more widely used in many fields, this is still a subject of urgent research.
For an optical system with a single optical element, the ideal object point is assumed, and it exhibits only intrinsic aberration; but if the optical system consists of two or more optical elements, the object point of the optical surface (excluding the first optical surface) will not be ideal, because the pupil coordinates on the optical surface will be affected by the aberration of the preceding optical surfaces, and the variable quantity of the pupil coordinates will be regarded as an extrinsic aberration. Therefore, the total aberration should be the sum of the intrinsic aberration and the extrinsic aberration [
9]. At present, the calculation method for extrinsic aberration is the subject of many studies. J. Sasian described the physical significance and calculation method for the extrinsic aberration of an axis-symmetric optical system and derived the extrinsic wave aberration calculation expressions based on the wave aberration function formulas given by R. V. Shack [
10,
11,
12]. In addition, J. Sasian also applied extrinsic aberration to indicate all-order spherical aberration in an axially translating plate system, mainly studying the case of an axis-symmetric optical system [
13]; however, the methods described above were primarily applied to the extrinsic aberration of an axis-symmetric or paraxial optical system. Regarding plane-symmetric optical systems with a one-dimensional field light source, Lin et al. applied wavefront aberration and spot diagram methods to study third-order aberration expressions with nonlinear accuracy for pupil-coordinated transmission of an optical system consisting of two optical elements; this is, in fact, a numerical method and cannot be used for study the case of multi-element optical system [
14]. Lin et al. applied the wavefront aberration method to study the aberration calculation method of a ultra-wide-angle optical system with a large aperture and only considered aberration terms with respect to an object point on the base ray (i.e., the field angle was zero). To address this problem, we have applied the wavefront aberration method to study the extrinsic aberration calculation method for soft X-ray and vacuum ultraviolet optical systems with field light source at a sagittal angle and have derived the corresponding aberration calculation expressions; however, these studies only focused on an optical system with a one-dimensional field light source. Nevertheless, for the case of a two-dimensional field light source (i.e., the meridional and sagittal field angle), present studies focus on intrinsic aberration with linear approximation accuracy for the pupil-coordinate calculation method [
15], and there is still no analysis method for extrinsic aberration in this kind of optical system; thus, in this paper we propose a calculation method for extrinsic aberration in a plane-symmetric optical system with a two-dimensional field light source.
Section 2 describes the definition of a plane-symmetric optical system with a light source containing a meridional and sagittal field angle.
Section 3 discusses fourth-order wave aberration and third-order aberration expressions with linear accuracy transfer of pupil coordinates between adjacent optical surfaces.
Section 4 initially discusses an extrinsic aberration calculation method and derives the corresponding aberration expressions; it then derives the expressions for the second-order accuracy transfer relationship of pupil coordinates and obtains the amount of variation in wave aberration due to the above factor. Finally, these calculation results of spot diagrams of two soft X-ray and vacuum ultraviolet optical systems with a two-dimensional field light source obtained by the aberration expressions derived in the above are compared to ones using the ray-tracing software Shadow [
16]; the correctness of the aberration expressions is then verfied.
2. Definition of a Plane-Symmetric Optical System with Meridional and Sagittal Field Angles
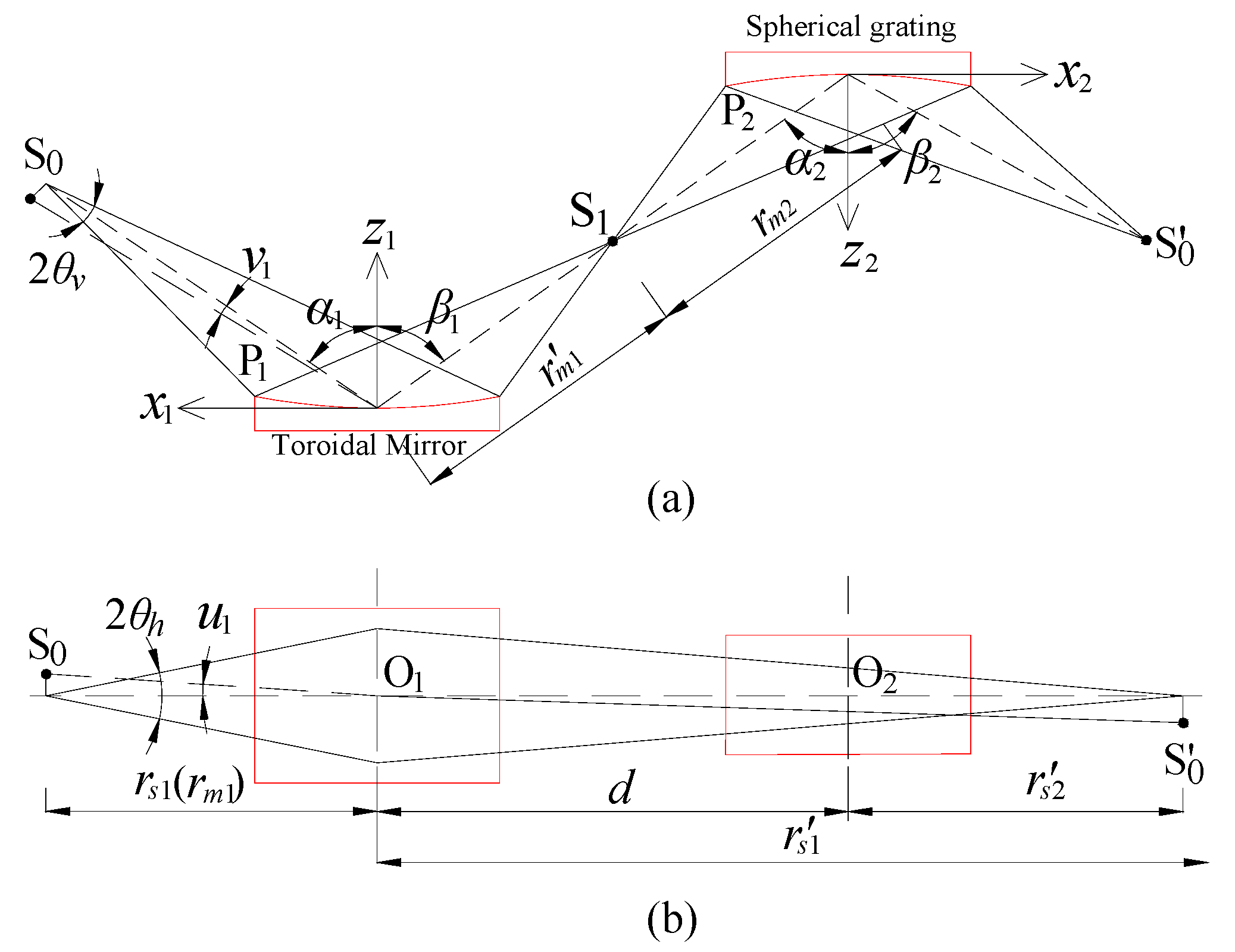
The optical path diagram of a plane-symmetric optical system with meridional and sagittal field angle light sources is shown in
Figure 1. S
0 is an off-axis object point with meridional and sagittal field angles,
v,
u, in the object space;
and
are the coordinate systems of the optical surface and pupil, and O and
are their respective vertices;
α and
β are the incidence and reflection angles of the base ray
; in addition,
and
are the sagittal and meridional field angles of the image point in image space S
1.
For the plane-symmetric optical system, we need to define the general form of a plane-symmetric surface, which can be expressed as follows [
17]:
Since this paper studies the third-order intrinsic aberration modification with second-order accuracy transfer of pupil coordinates and the extrinsic aberration of a plane-symmetric optical system with a two-dimensional field light source, the fourth-order wave aberration needs to be studied in the following. Therefore, Equation (1) should be expanded to fourth order with respect to the
and
series, and the equation for a plane-symmetric optical surface should be
For the plane-symmetric optical system, a toroidal surface can be applied to obtain information for the meridional and sagittal planes; thus, its figure coefficients
are given as follows:
where
and
are the curvature radius of the meridional and sagittal planes of the toroidal surface, respectively.
3. Third-Order Intrinsic Aberration with Linear Transfer of Pupil Coordinates
For the plane-symmetric optical system with meridional and sagittal field angle light sources, the fourth-order wave aberration expression should be [
15]
where
and
are the pupil coordinates on the optical surface of the optical element, and
,
,
and
are the corresponding orders of
,
,
and
, respectively.
In accordance with the aberration theory of a plane-symmetric optical system, we applied the optical path function to derive the wave aberration expressions; thus, if the optical element is a grating, the groove function for the grating will also contribute to the wave aberration. For a holographic and mechanical rule grating, the groove function is [
15]
where
represents the groove spacing of the grating at the vertex, and
and
are given by Equations (20)–(22) and (A5) of reference [
18].
Therefore, the wave aberration coefficients,
, of Equation (4) can be calculated as follows:
In Equation (6),
denotes the wave aberration of an object space, and their corresponding expressions are given in Appendix A of reference [
1];
,
m and
are the diffraction order and working wavelength of the grating; the function expressions
are listed in
Table 1. However, if the optical element is a mirror, the last term of the right side of Equation (6),
, does not need to be considered and should be zero.
In order to calculate the wave aberration
W of Equation (4), we need to apply the first-order wave aberration coefficients
to determine the incidence and reflection angles of the base ray,
α and
β; the second-order wave aberration coefficients
and
will need to be applied to determine the position of the principal ray (or pupil position) in the meridional and sagittal plane in the object and image space,
,
,
and
; the second-order wave aberration coefficients
and
will need to be applied to determine meridional and sagittal focal distances in object and image space,
,
,
and
, respectively [
15]. Therefore, the image aberration on the image plane of the optical system contributed by the wave aberration of Equation (4) should be
For a soft X-ray and vacuum ultraviolet optical system consisting of
g optical surfaces, the aperture-ray coordinates on each optical surface need to transfer to those on last optical surface. The total fourth-order wave aberration of optical system is [
15]
Applying the ray geometric relation and polynomial fitting method, we can obtain the linear transfer relationship of the pupil coordinates between adjacent optical surfaces; these are given in as follows:
With these coefficients:
,
,
.
Therefore, applying the transfer relationship given in Equation (9), the wave aberration calculation expression of Equation (8) can be rewritten as
where
; the coefficients of
,
and
are
In addition, the aberration of a plane-symmetric optical system is related to the pupil position of each element, and the pupil-position transfer equations in the meridional and sagittal plane of the adjacent optical surfaces are [
15]
According to the above discussions, the third-order aberration expressions of the plane-symmetric optical system should be
The aberration coefficients of Equation (13),
and
, are listed in Appendix A of reference [
15].
4. Intrinsic Aberration Modification Caused by Second-Order Accuracy Transfer of Pupil Coordinates and Extrinsic Aberration
In
Section 2, we discussed the calculation method for intrinsic aberration in the case of a linear transfer relationship of the pupil coordinates and given the corresponding aberration expressions. However, for a multi-element optical system, if the meridional curvature radius of the optical element is small, or the field angle of the object point of the optical system is large, the effect of pupil coordinate transfer using nonlinear relation is usually not neglected; if we nevertheless applied the linear transfer relation expression given in Equation (9) to calculate the aberration in this case, it will result in a serious error; therefore, in order to improve aberration accuracy, we adopted the second-order transfer relationship of the pupil coordinates on the adjacent optical surfaces in this paper. In addition, for a multi-element optical system, the object point of the latter optical surface will not be an ideal point due to the effect of the aberration of the preceding optical surfaces; the variable quantity of the pupil coordinates of the optical surface caused by the aberration of the preceding optical surfaces is regarded as an extrinsic aberration.
Figure 2 shows the optical path diagram of an aperture ray passing through a soft X-ray and vacuum ultraviolet optical system consisting of two optical surfaces. The rays
S0O1O2 and
S0P1P2 are the principal ray and aperture ray, and the aperture ray
S0P1P2 intersects optical surface G
1, G
2 at
P1,
P2;
xiyizi (
i = 1, 2) and
are the coordinate systems of optical surface G
i and image plane
at a distance of
from optical surface G
1; The coordinates of
B1 and
represent the aperture-ray coordinates on G
2 with and without the extrinsic aberration, respectively.
In the following we first discuss the second-order accuracy transfer relationship of the pupil coordinates between adjacent optical surfaces. The relation expressions of coordinates
P1(
x1,
y1) and
P2(
x2,
y2) are assumed to be
And then Next, combining these with the ray equation for
using the polynomial fitting method, yields the second-order mapping relationship between the coordinates
P1(
x1,
y1) and
P2(
x2,
y2) as follows:
In Equation (15), since for the dimension of a source (approximately 1 mm) such as a synchrotron radiation light source or laser, the meridional and sagittal field angles
u and
v of the object point are usually very small, terms only containing
u and
v are ignored; the corresponding coefficients are given as
According to the aberration descriptions of a multi-element optical system in the first paragraph of this section, the actual aberration is the sum of the intrinsic aberration and the extrinsic aberration; in the following we will discuss the calculation method for extrinsic aberration. Firstly, based on third-order intrinsic aberration calculation expressions of a plane-symmetric optical system with a two-dimensional field light source, we applied the wave aberration of optical surface G
1 to calculate the resulting aberration on the image plane positioned at optical surface G
2 (i.e., in the case of
in
Figure 2). The amount of change in the pupil coordinates with second-order accuracy transfer on the entrance wavefront of optical surface G
2 caused by extrinsic aberration can be calculated as follows:
Next, the
and
coordinates need to be converted to the coordinate system of optical surface G
2; the transfer relationship between them is
According to the above discussion, the actual pupil coordinates of the ray that impinges on the optical surface G
2 should be
Therefore, the actual total wave aberration of a soft X-ray and vacuum ultraviolet optical system consisting of two optical surfaces is
We then applied the wave aberration calculated in Equation (20),
, to the aberration calculation of the optical system. In order to simplify the intrinsic aberration modification caused by the second-order accuracy transfer of the pupil coordinates and extrinsic aberration expressions, the pupil coordinates on the optical surface and the sagittal and meridional field angles of G
1,
, were applied to calculate the aberration values mentioned above. However, the intrinsic aberration in the case of the linear accuracy transfer of the pupil coordinates still incorporates
. Therefore, the final coordinates of the ray impinging on the image plane are
where
and
denote the intrinsic aberration coefficients obtained via the linear transfer of the pupil coordinates;
and
are intrinsic aberration modification coefficients due to the second-order accuracy transfer of the pupil coordinates and to the extrinsic aberration coefficients; their expressions are given in
Appendix A. Compared to the case of a soft X-ray vacuum ultraviolet optical system with a one-dimensional field light source, this system has the following additional fourteen aberration items:
,
,
,
,
,
,
,
,
,
,
,
,
and
.
5. Simulation Experiment Validation
In
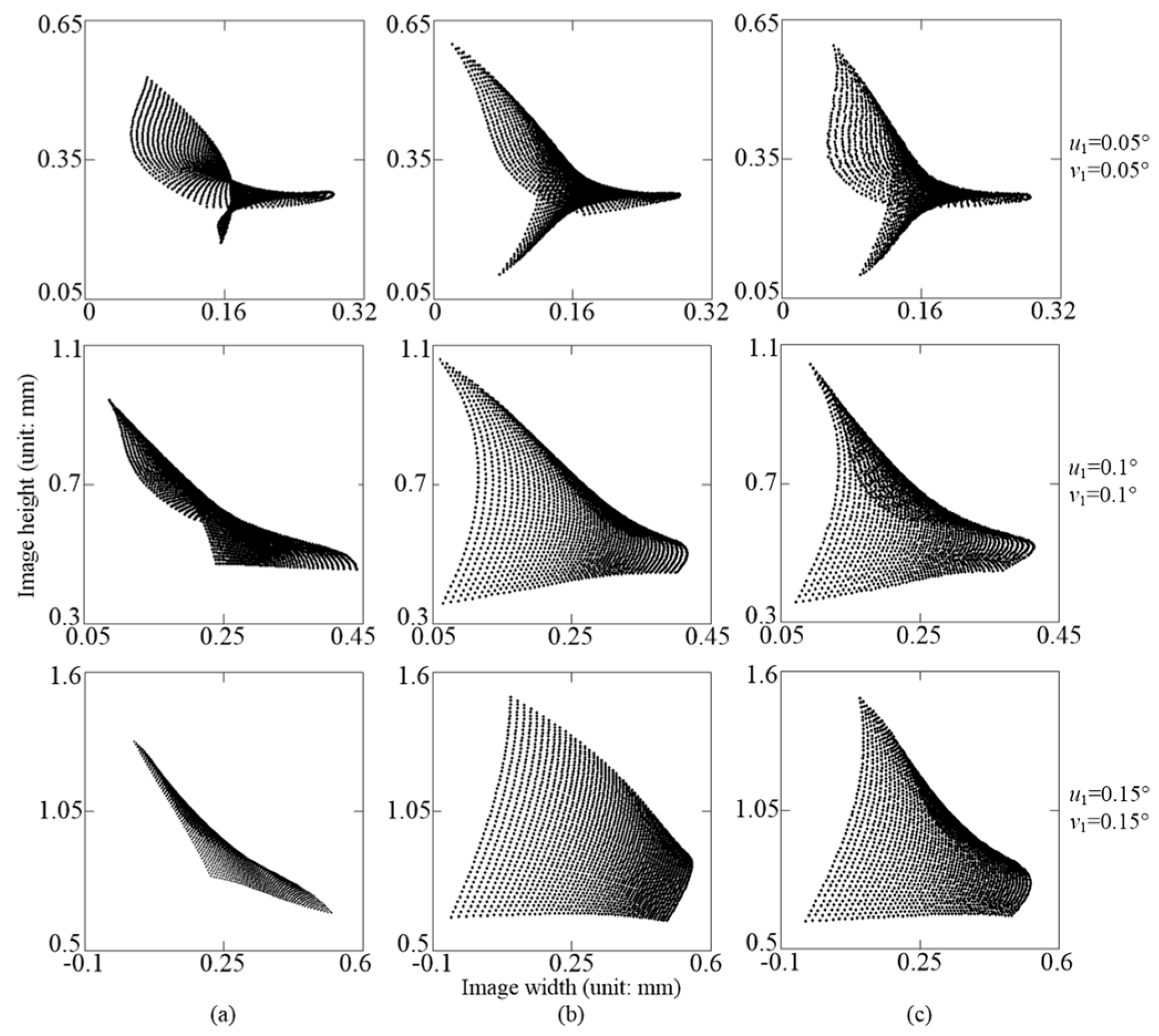
Section 3, we derive the intrinsic aberration modification due to the second-order accuracy transfer of pupil coordinates and to the extrinsic aberration expressions. In the following we will apply these aberration expressions and the ray-tracing software Shadow to calculate a spot diagram on the image plane of the two design examples of a soft X-ray and vacuum ultraviolet system with meridional and sagittal field angle light sources and to validate these expressions. Considering that the aberration expression derived in this paper can be used for analyzing the imaging performance of a soft X-ray and vacuum ultraviolet system with meridional and sagittal field angle light sources consisting of a grating or a different figure mirror, we thus selected the first optical system (optical system I) using Tondello’s spectrograph: the first optical element is a torodial mirror and the second optical element is a spherical-grating monochromator; its optical path diagram is shown in
Figure 3. The divergence angles of the light beam emitted from the source of optical system I in the meridional and sagittal planes,
and
, are 10 mrad and 20 mrad, respectively; the groove density of the spherical grating is 600 grooves/mm and works in the
diffraction order at a wavelength of 4.4 nm; the other optical parameters in
Figure 3 are listed in
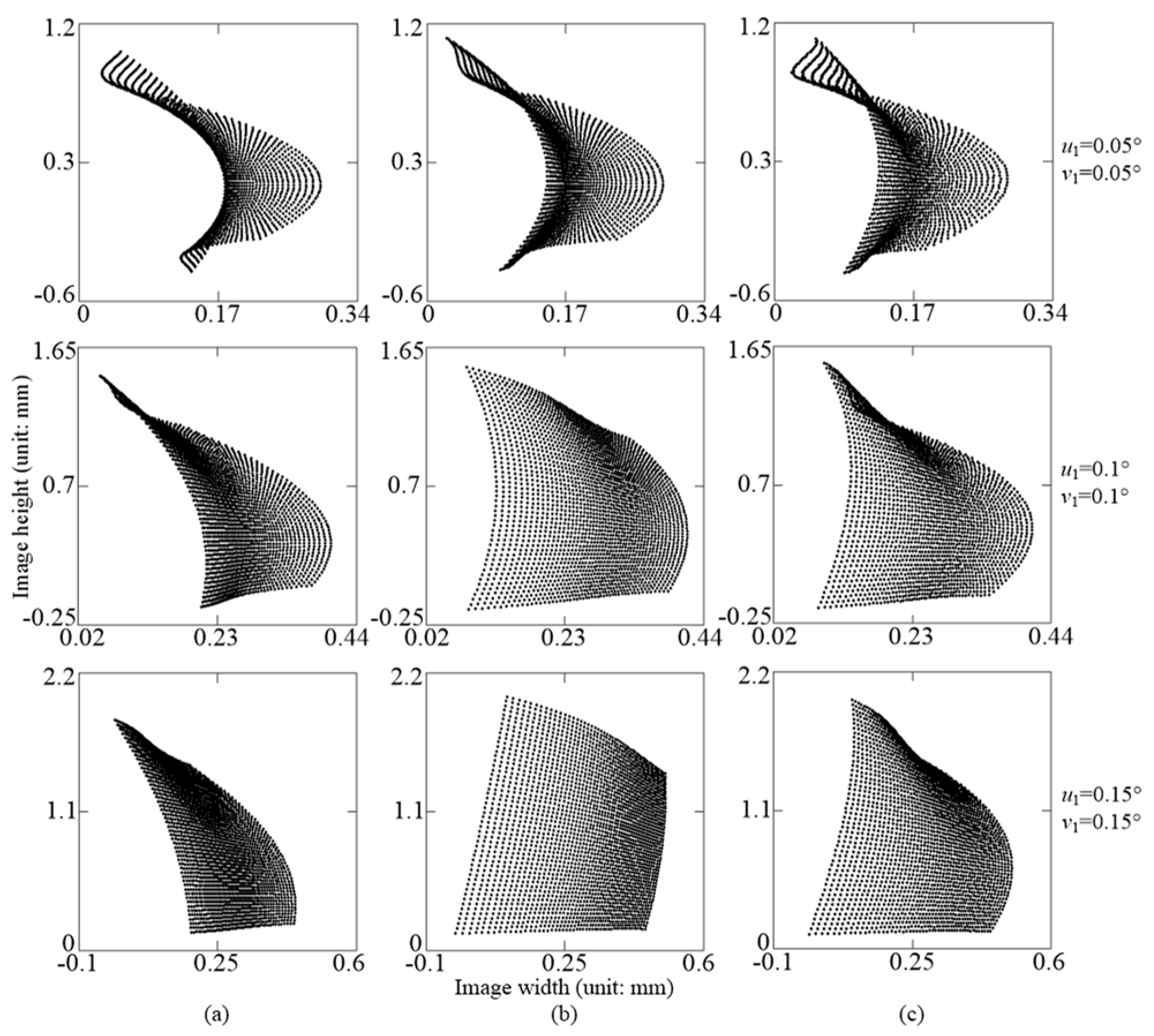
Table 2. In order to further validate these aberration expressions, optical system II was modified such that the curvature radius of the meridional plane of the toroidal mirror was reduced to the basis of optical system I and was set 25 cm. The other parameters are consistent with those of optical system I. In addition, in the following spot diagram calculations of the image planes of optical systems I and II, the positions of the entrance pupil in the meridional and sagittal planes are both on the first optical surface; and the meridional and sagittal field angles are assumed to be
,
and
.
Ray spot diagrams of optical systems I and II using the three calculation methods based on the optical structure parameters given in the above are shown in
Figure 4 and
Figure 5, respectively; and
Figure 4a,b and
Figure 5a,b are the calculation results using the intrinsic aberration with linear transfer of the pupil coordinates,
and
, and adding the intrinsic aberration modification coefficients due to the second-order accuracy transfer of the pupil coordinates and to the extrinsic aberration coefficients,
and
, respectively.
Figure 4c and
Figure 5c shows the calculation results obtained using the ray-tracing software Shadow; their field angles are listed on the right side of figure.
For a soft X-ray and vacuum ultraviolet optical system with meridional and sagittal field angle light sources, we compared the shape and size of the ray spot diagrams given in
Figure 4 and
Figure 5 to the corresponding calculation results obtained using the ray-tracing software Shadow. In this way, we were able to determine that the results calculated on the basis of the intrinsic aberration coefficients with linear transfer of pupil coordinates
and
contained serious errors. The calculation accuracy obtained by taking the intrinsic aberration modification coefficients due to second-order accuracy transfer of the pupil coordinates and adding these to extrinsic aberration coefficients
and
, on the other hand, was found to be sufficient; the small differences between the two sets of results are mainly due to the higher-order aberration contribution or to the higher-order coordinate components in the transfer of the pupil coordinates between the adjacent optical surfaces. Based on the above discussions, the calculation accuracy of third-order intrinsic aberration modification with second-order accuracy transfer of the pupil coordinates and extrinsic aberration expressions is satisfactory.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}