

AHiLS—An Algorithm for Establishing Hierarchy among Detected Weak Local Reflection Symmetries in Raster Images

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- a new algorithm for weak local symmetry detection in raster images;
- performing symmetry detection on extracting contours previously extracted from the raster image;
- using a convex hull of contours to determine the positions of potential symmetry line candidates;
- representing hierarchical dependencies by a multi-branch tree for further processing.
2. Related Works
3. Materials and Methods
| Algorithm 1 The main algorithm of the AHiLS |
|
- The necessary parameters, explained in the following, are set in line 3.
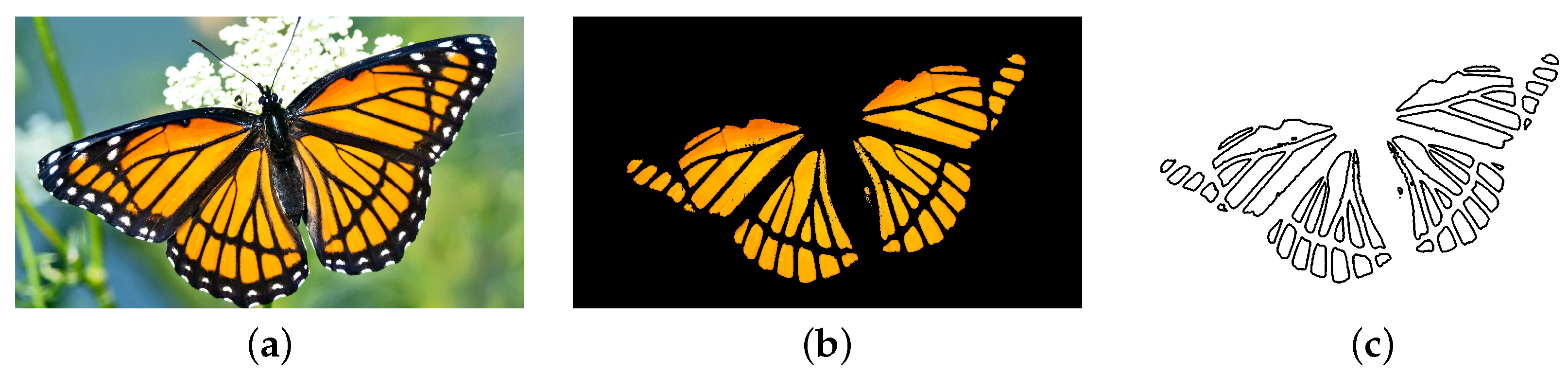
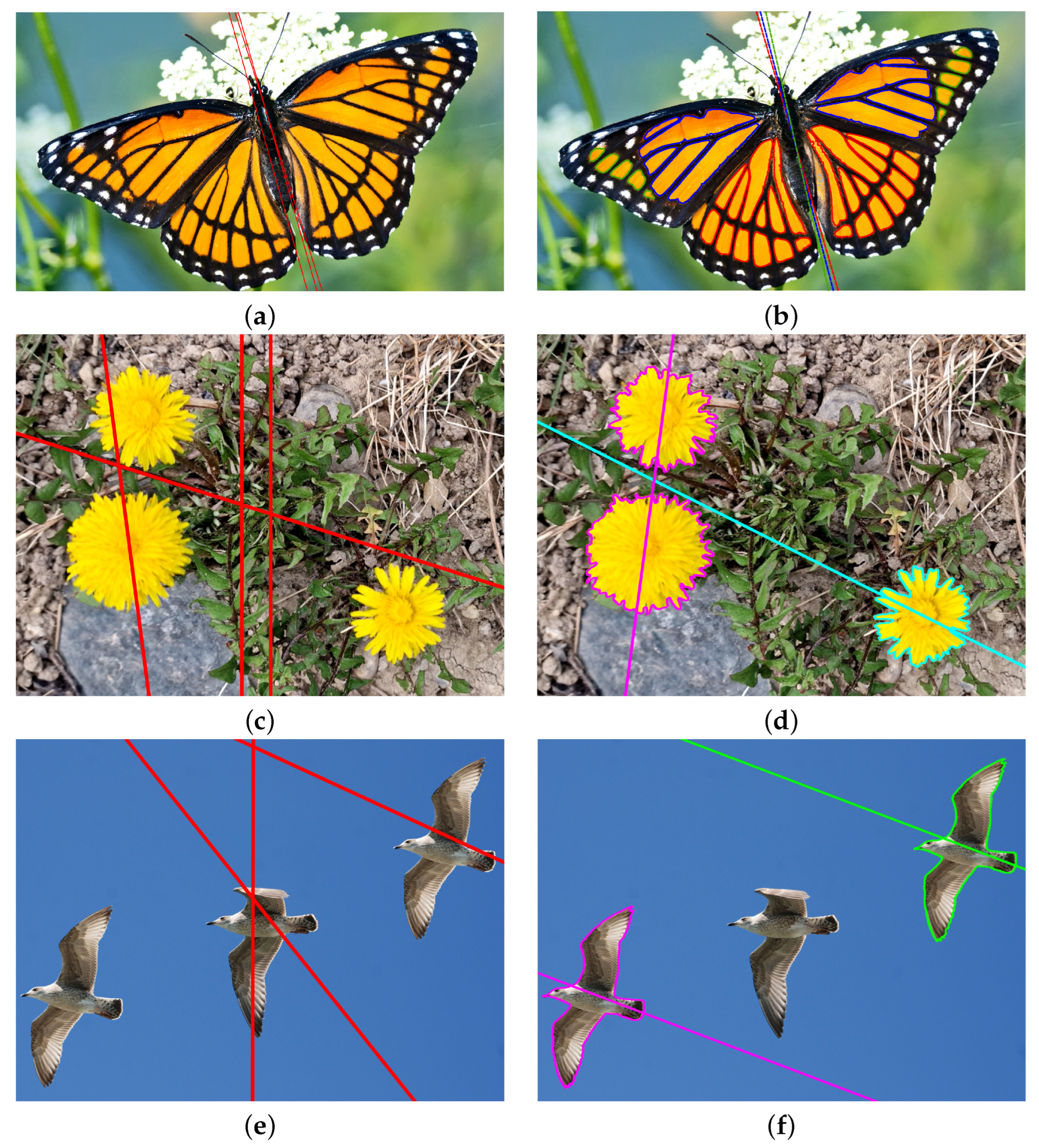
- is segmented based on colours (line 4 in Algorithm 1), where a user specifies the range of the desired colours. Pixels with colours outside are set to black. The segmented image , suitable for further processing, is obtained in this way (see Figure 1b). The segment consists of a set of four connected pixels and should be large enough. In our implementation, the segment is accepted when it contains at least 1% of all pixels in .
- is converted into greyscale, filtered to reduce the noise, and smoothed in line 5. For this, Gaussian blur and morphological erosion are applied [48].
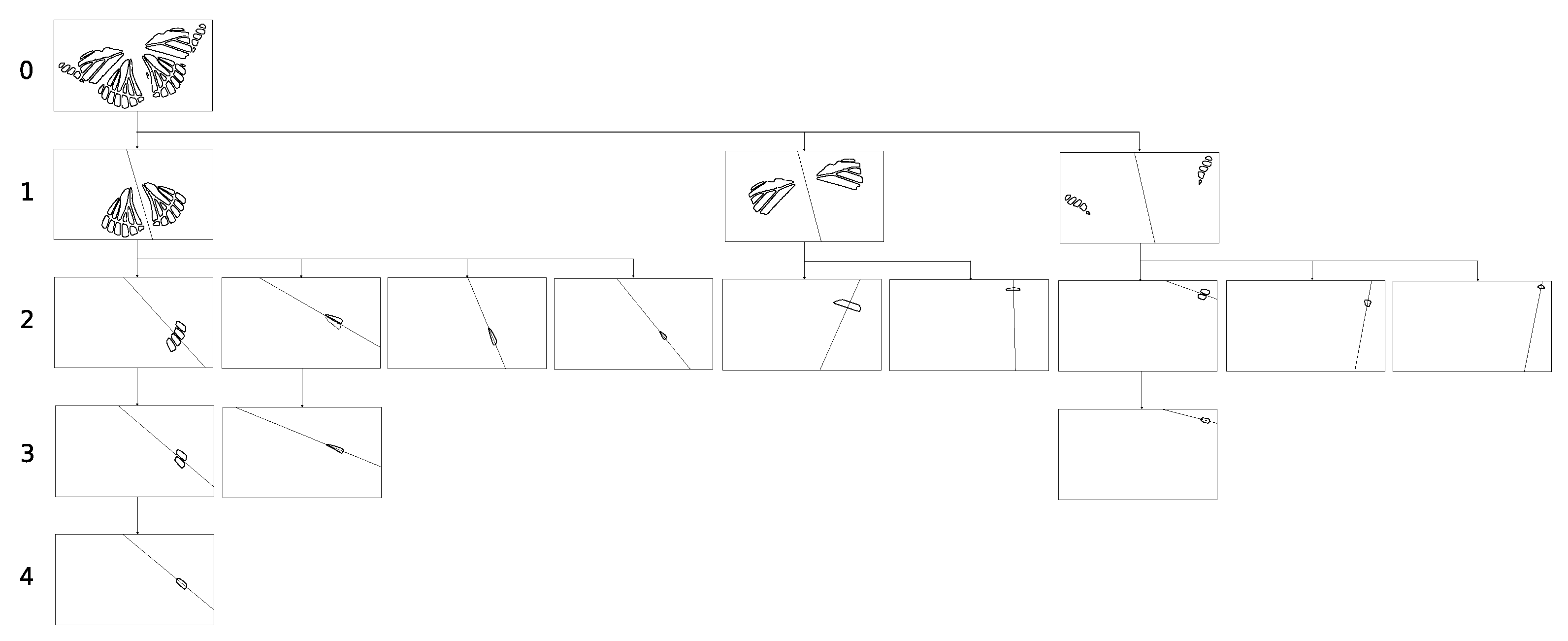
- The level of the hierarchy and the multi-branch tree are initialised in lines 7 and 8.
| Algorithm 2 A depth-first search investigation of contours |
|
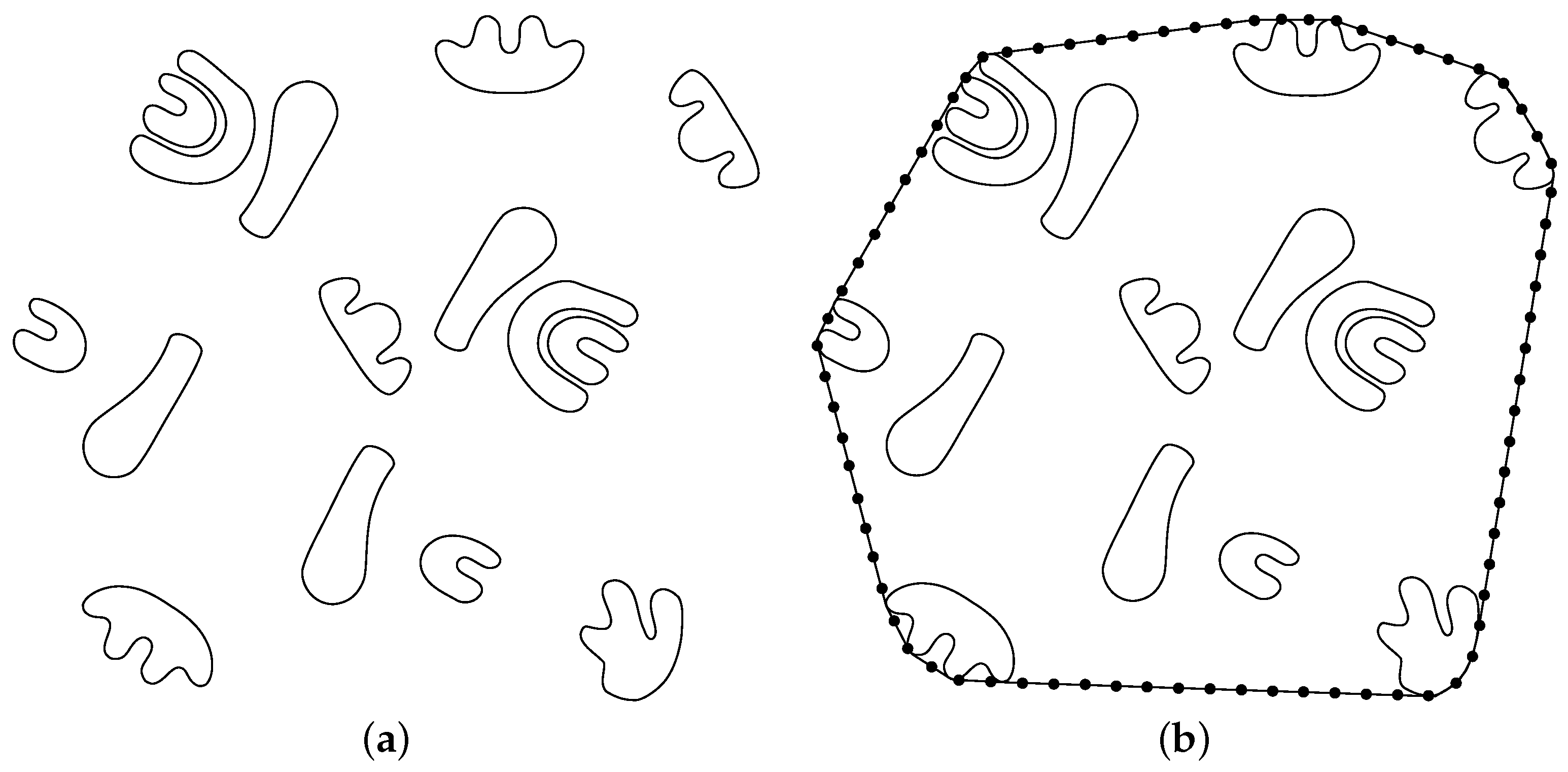
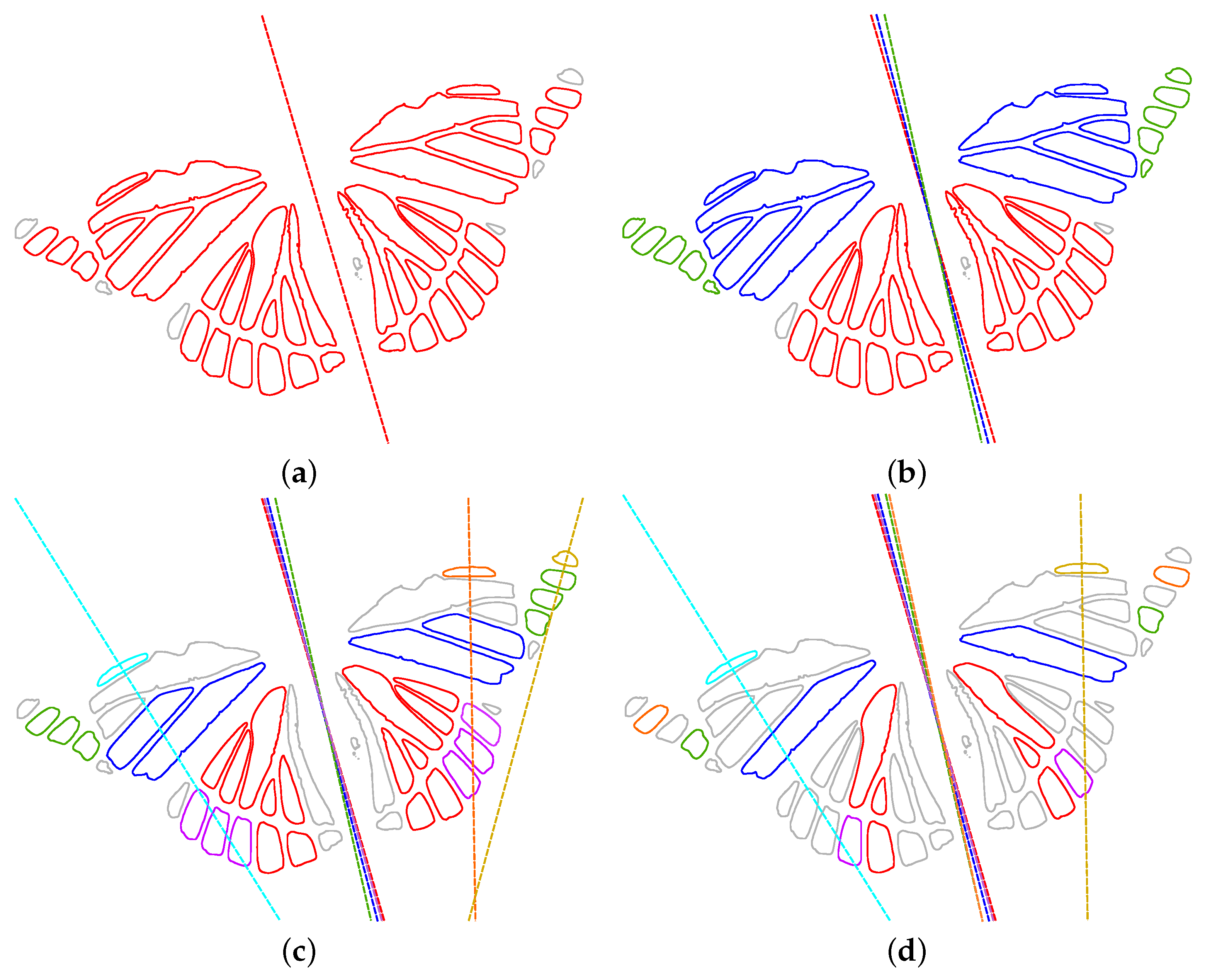
- Convex hull H [49] is constructed from contours , at first (line 2 in Algorithm 2). The set of so-called anchor points is placed along the convex hull’s edges uniformly (line 3), as shown in Figure 2b. The distance d between the consecutive anchor points on H is specified heuristically (in our case was used as a default) or entered by the user. The number of anchor points is reduced drastically by placing them on H instead of, for example, distributing them uniformly inside the whole .
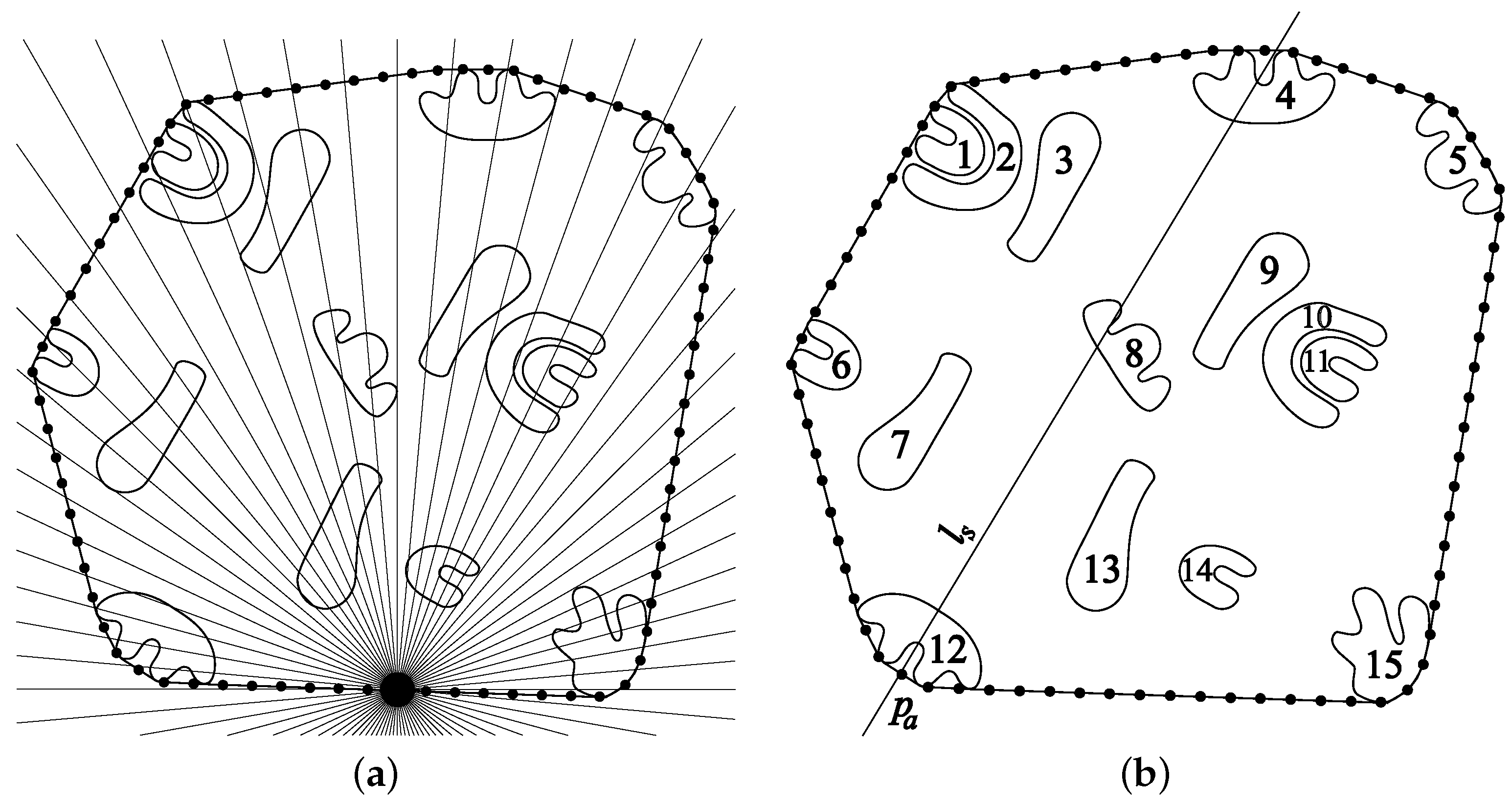
- A bundle of potential symmetry lines , , , with slopes , is laid through (see Figure 3a) in line 6. b is set by default to 5, resulting in lines.
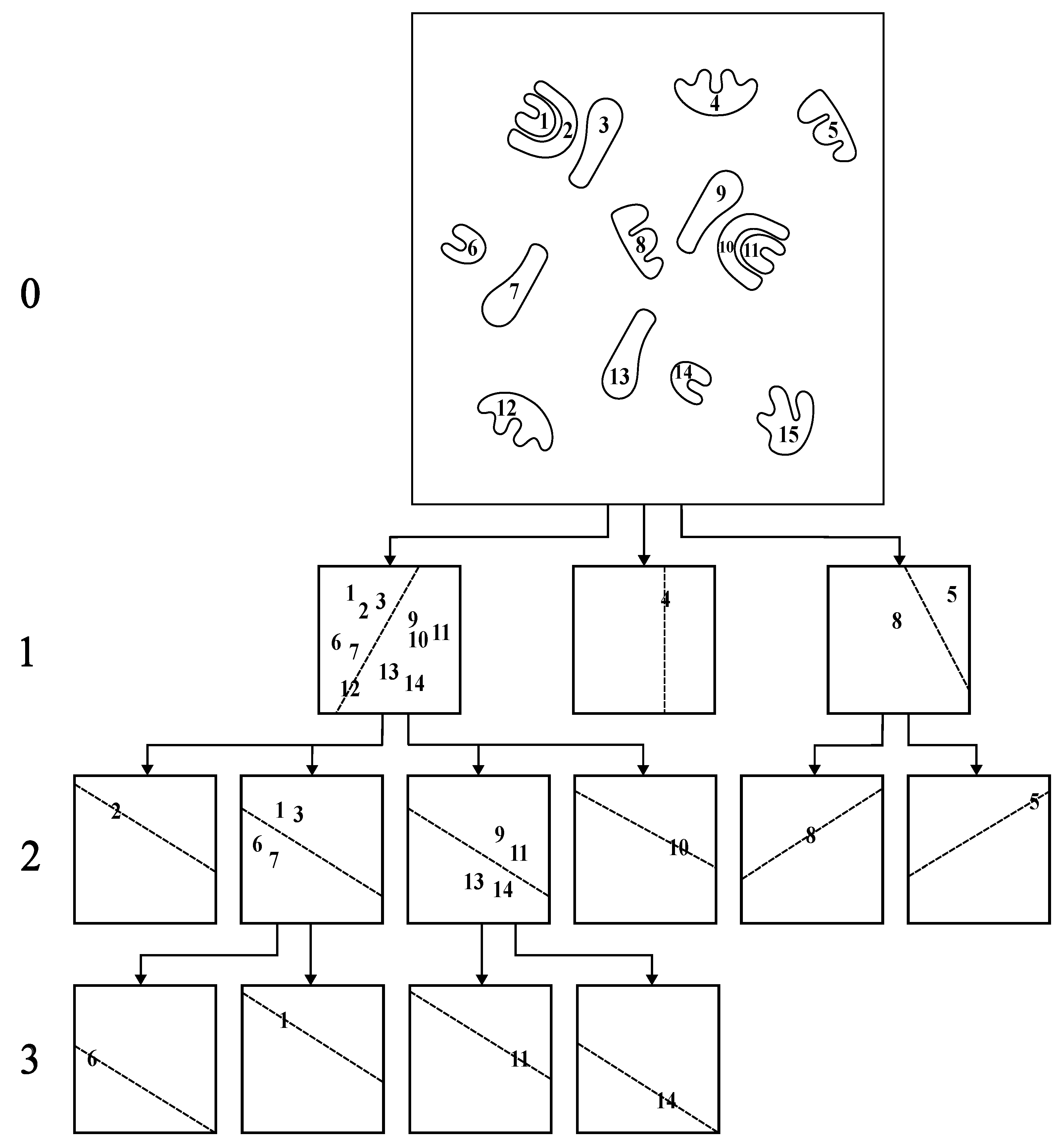
- The contours in are classified according to . Namely, determines two half-planes, and (in some cases) splits into three sets (see Figure 3b):
- set contains contours being located completely in the first half-plane;
- set includes contours from the opposite half-plane;
- set stores those contours that are pierced by .
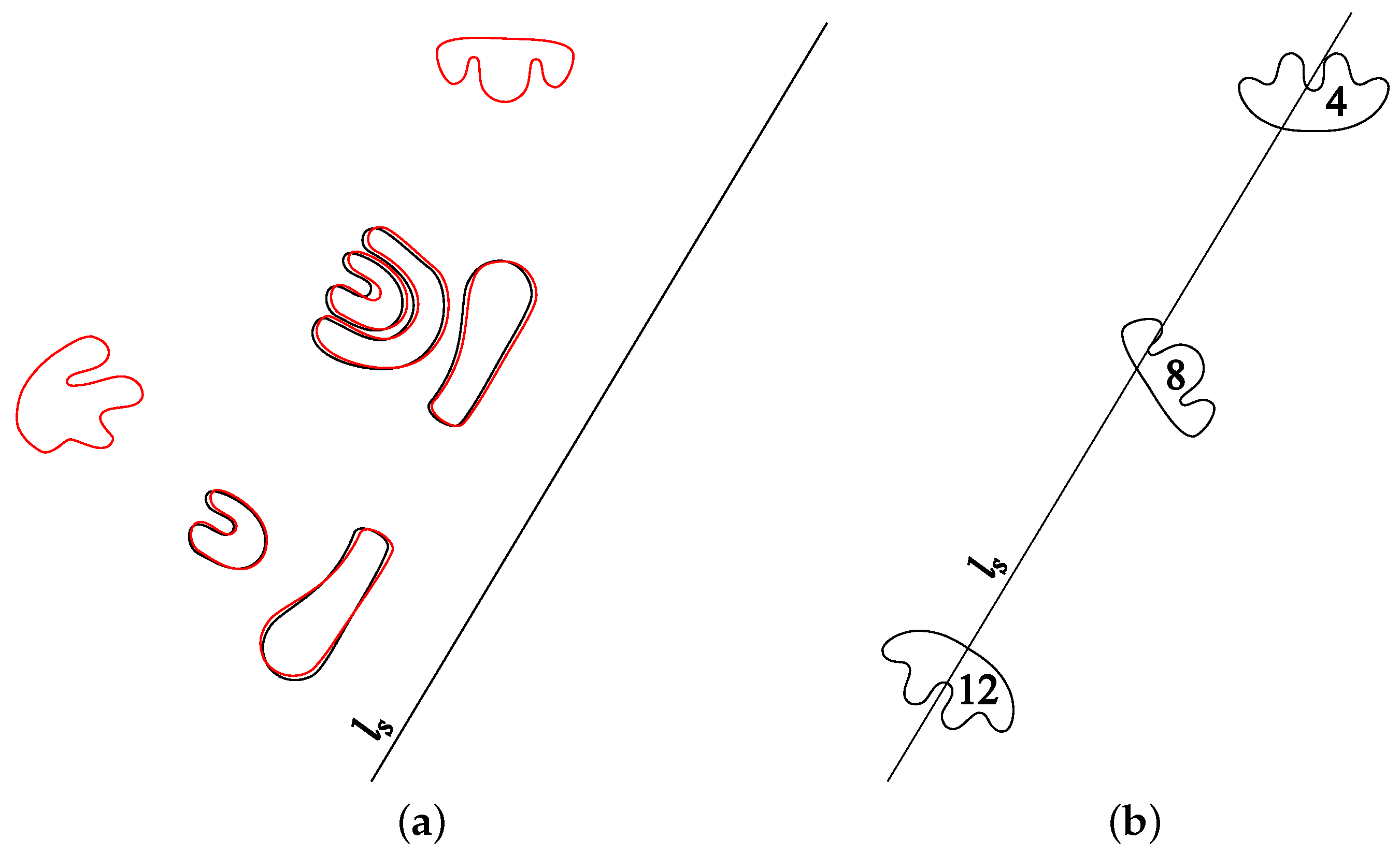
Those sets are obtained by the function in line 8. If one of the sets or is empty, is not the line of symmetry for any pairs of contours. Otherwise, and must be tested additionally as follows.- Contours from are reflected over to obtain set in line 10 (see Figure 4a).
- The similarity of the contours in and is checked. The coverage percentage of the two considered contours is calculated for this. The two contours are paired and returned in the in line 11 if the coverage percentage is greater than the threshold t. The percentage of coverage is returned in the list . The threshold t is set at in our implementation. However, t can be determined interactively by the user. Its effect is demonstrated later in Section 4.
- This information is then stored in a temporal storage in line 12 of Algorithm 2.
- The algorithm selects the best line of symmetry in line 22 after processing all candidates from all . The criterion for selection is the highest number of reflection contour pairs determined by this line. The line with the highest percentage of contour coverage is selected if more lines have the same number of pairs.
- The contours in are checked for self-symmetry (see Figure 4b) in lines 15–20. Those that are symmetric are stored in and inserted into .
- If exits, the DFS is called recursively with sets and in lines 26 and 27 in Algorithm 2.
- The information about the found symmetries stored in is, together with the multi-branch tree, returned to the main part of the algorithm at the end. The multi-branch tree for our example is shown in Figure 5.
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Slope angle of a considered , i.e., , | |
| Set of symmetric contours | |
| Output set of symmetric contours from the recursive call DFS(,…) | |
| Output set of symmetric contours from the recursive call DFS(,…) | |
| Temporal storage of symmetric pairs and coverage values | |
| Small positive tolerance value | |
| a | Loop index for anchor points |
| A | Set of anchor points along the convex hull H |
| AHiLS | Algorithm for establishing hierarchy of weak local symmetries in raster images |
| b | User parameter for setting the slope step () for lines in a bundle |
| The set of contours (borders of segments from ; formal parameter of DFS) | |
| Set of contours completely in one half-plane defined by line | |
| Set of contours from the opposite half-plane to the one containg | |
| Contours from the set , | |
| COSCO | Clustering of Symmetric Cross-Sections of Objects |
| Set of contours being pierced by | |
| CPU | Central processing unit |
| Self-symmetry coverage percentage of the contour (line 16 of Algorithm 2) | |
| Contour from , (line 16 of Algorithm 2) | |
| Set of contours obtained by reflecting over | |
| d | User parameter for the distance step between two consecutive anchor points |
| DFS | Depth-first search |
| H | Convex hull created from the contours of (input parameter of DFS) |
| Bundle of potential symmetry lines through a considered anchor point | |
| L&E method | The Loy and Eklundh method |
| Index of the considered level in the multi-branch tree | |
| Best symmetry line of all from all | |
| LiDAR | Light detection and ranging |
| List of symmetric pairs of contours from and | |
| List of coverage percentage values of pairs of contours from and | |
| Line in a bundle through a considered , | |
| p | Point |
| Set of points (raster image) | |
| Point (close to p in the weak symmetry definition) | |
| Anchor point | |
| Pixel in the x-th column and y-th row of the raster image | |
| q | Loop index for contours in |
| Range of colours | |
| s | Loop index for lines in a bundle |
| Segmented (and filtered) image | |
| SIFT | Scale-invariant feature transform |
| SSVDAG | Symmetry-Aware Sparse Voxel Directed Acyclic Graph |
| SVDAG | Sparse Voxel Directed Acyclic Graph |
| t | User-defined coverage percentage threshold for pairing two contours |
| Geometric transformation | |
| Multi-branch tree of week local symmetries | |
| X, Y | Image resolution (numbers of columns and rows) |
References
- Barker, W.H.; Howe, R. Continuous Symmetry: From Euclid to Klein; American Mathematical Society: Providence, RI, USA, 2007. [Google Scholar]
- Jäntschi, L.; Bolboacã, S.D. Symmetry in Applied Mathematics; MDPI: Basel, Switzerland, 2020. [Google Scholar]
- Dias, G.; Liberti, L. Exploiting symmetries in mathematical programming via orbital independence. Ann. Oper. Res. 2021, 298, 1–34. [Google Scholar] [CrossRef]
- Evans, C.S.; Wenderoth, P.; Cheng, K. Detection of Bilateral Symmetry in Complex Biological Images. Perception 2000, 29, 31–42. [Google Scholar] [CrossRef] [PubMed]
- Mehaffy, M.W. The Impacts of Symmetry in Architecture and Urbanism: Toward a New Research Agenda. Buildings 2020, 10, 249. [Google Scholar] [CrossRef]
- McManus, I.C. Symmetry and Asymmetry in Aesthetics and the Arts. Eur Rev. 2005, 13, 157–180. [Google Scholar] [CrossRef]
- Glowacz, A.; Królczyk, G.; Antonino-Daviu, J.A. Symmetry in Mechanical Engineering; MDPI: Basel, Switzerland, 2020. [Google Scholar]
- Modrea, A.; Munteanu, V.M.; Pruncu, I. Using the Symmetries in the Civil Engineering. An overview. Procedia Manuf. 2020, 46, 906–913. [Google Scholar] [CrossRef]
- Montoya, F.G.; Navarro, R.B. Symmetry in Engineering Sciences; MDPI: Basel, Switzerland, 2019. [Google Scholar]
- Qui, W.; Yuan, J.; Ukwatta, E.; Sun, Y.; Rajchl, M.; Fenster, A. Prostate Segmentation: An Efficient Convex Optimization Approach With Axial Symmetry Using 3-D TRUS and MR Images. IEEE Trans. Med. Imaging 2014, 33, 947–960. [Google Scholar]
- Wu, Y.; He, F.; Han, S. Collaborative CAD Synchronization Based on a Symmetric and Consistent Modeling Procedure. Symmetry 2017, 9, 59. [Google Scholar] [CrossRef]
- Tyler, C.W. Human Symmetry Perception and its Computational Analysis; Psychology Press: Abingdon, UK, 1996. [Google Scholar]
- Bertamini, M.; Makin, A.D. Brain activity in response to visual symmetry. Symmetry 2014, 6, 975–996. [Google Scholar] [CrossRef]
- Podgorelec, D.; Lukač, L.; Žalik, B. Reflection symmetry detection in Earth observation data. Sensors 2023, 23, 7426. [Google Scholar] [CrossRef]
- Wang, Z.; Tang, Z.; Zhang, X. Reflection Symmetry Detection Using Locally Affine Invariant Edge Correspondence. IEEE Trans. Image Process. 2015, 24, 1297–1301. [Google Scholar] [CrossRef]
- Mitra, N.J.; Pauly, M.; Wand, M.; Ceylan, D. Symmetry in 3D Geometry: Extraction and Applications. Comput Graph Forum. 2013, 32, 1–23. [Google Scholar] [CrossRef]
- Abu-Faraj, M.; Al-Hyari, A.; Alqadi, Z. A Complex Matrix Private Key to Enhance the Security Level of Image Cryptography. Symmetry 2022, 14, 664. [Google Scholar] [CrossRef]
- Chen, Y.; Zhan, S.; Xu, W.; Martin, R.R.; Cheng, Z.-Q. Parametric 3D modeling of a symmetric human body. Comput Graphic. 2019, 81, 52–60. [Google Scholar] [CrossRef]
- Žalik, B.; Strnad, D.; Kohek, Š.; Kolingerová, I.; Nerat, A.; Lukač, N.; Podgorelec, D. A Hierarchical Universal Algorithm for Geometric Objects’ Reflection Symmetry Detection. Symmetry 2022, 14, 1060. [Google Scholar] [CrossRef]
- Petitjean, M. A definition of symmetry. Symmetry Cult. Sci. 2007, 18, 99–119. [Google Scholar]
- Prantl, M.; Váša, L.; Kolingerová, I. Symmetry-aware Registration of Human Faces. In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), Prague, Czech Republic, 25–19 February 2019; Cláudio, A.P., Bouatouch, K., Braz, J., Eds.; Science and Technology Publications: Setúbal, Portugal, 2019; pp. 185–192. [Google Scholar]
- Hruda, L.; Kolingerová, I.; Lávička, M.; Mañak, M. Rotational symmetry detection in 3D using reflectional symmetry candidates and quaternion-based rotation parameterization. Comput Aided Geom D. 2022, 98, 102138. [Google Scholar] [CrossRef]
- Zhang, D.; Lu, G. Review of shape representation and description techniques. Pattern Recogn. 2004, 37, 1–19. [Google Scholar] [CrossRef]
- Van Otterloo, P.J. A Contour Oriented Approach to Shape Analysis; Pearson Education Limited: London, UK, 1991. [Google Scholar]
- Sheynin, S.; Tuzikov, A.; Volgin, D. Computation of symmetry measures for polygonal shapes. In Proceedings of the 8th International Conference on Computer Analysis of Images and Patters (CAIP’99), Ljubljana, Slovenia, 1–3 September 1999; Lecture Notes in Computer Science 1689. Solina, F., Leonardis, A., Eds.; Springer: Berlin, Germany, 1999; pp. 183–190. [Google Scholar]
- Yang, X.; Adluru, N.; Latecki, L.; Bai, X.; Pizlo, Z. Symmetry of shapes via self-similarity. In Proceedings of the 4th International Symposium on Advances in Visual Computing (ISVC 2008), Las Vegas, NV, USA, 1–3 December 2008; Lecture Notes in Computer Science 5359. Bebis, G., Boyle, R., Parvin, B., Koracin, D., Remagnino, P., Porikli, F., Peters, J., Klosowski, J., Arns, L., Chun, Y.K., et al., Eds.; Springer: Berlin, Germany, 2008; pp. 561–570. [Google Scholar]
- Kushnir, O.; Fedotova, S.; Seredin, O.; Karkishchenko, A. Reflection symmetry of shapes based on skeleton primitive chains. In Proceedings of the 5th International Conference on Analysis of Images, Social Networks and Text (AIST 2016), Yekaterinburg, Russia, 7–9 April 2016; Communications in Computer and Information Science 661. Ignatov, D.I., Khachay, M.Y., Labunets, V.G., Loukachevitch, N., Nikolenko, S.I., Panchenko, A., Savchenko, A.V., Vorontsov, K., Eds.; Springer: Cham, Switzerland, 2016; pp. 293–304. [Google Scholar]
- Karkischenko, V.; Mnukhin, V. Fourfold symmetry detection in digital images based on finite Gaussian fields. In Proceedings of the First International Scientific Conference Intelligent Information Technologies for Industry (IITI’16), Sochi, Russia, 16–21 May 2016; Advances in Intelligent Systems and Computing 451. Abraham, A., Kovalev, S., Tarassov, V., Snášel, V., Eds.; Springer: Cham, Switzerland, 2016; pp. 153–162. [Google Scholar]
- Zahn, C.T.; Roskies, R.Z. Fourier descriptors for plane closed curves. IEEE Trans. Comput. 1972, C-21, 269–281. [Google Scholar] [CrossRef]
- Yip, R.; Tam, P.; Leung, D. Application of elliptic Fourier descriptors to symmetry detection under parallel projection. IEEE Trans. Pattern Anal. 1994, 16, 277–286. [Google Scholar] [CrossRef]
- Loy, G.; Eklundh, J.-O. Detecting Symmetry and Symmetric Constellations of Features. In Proceedings of the Computer Vision (ECCV 2006), Graz, Austria, 7–13 May 2006; Lecture Notes in Computer Science 3952. Leonardis, A., Bischof, H., Pinz, A., Eds.; Springer: Berlin, Germany, 2006; pp. 508–521. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough Transformation to Detect Lines and Curves in Pictures. Comm ACM. 1972, 15, 11–15. [Google Scholar] [CrossRef]
- O’Mara, D.; Owens, R. Measuring bilateral symmetry in digital images. In Proceedings of the Digital Processing Applications (TENCON ’96), Perth, Australia, 26–27 November 1996; IEEE: Piscataway, NJ, USA, 1996; pp. 151–156. [Google Scholar]
- Sun, C.; Si, D. Fast reflectional symmetry detection using orientation histograms. Real-Time Imaging 1999, 5, 63–74. [Google Scholar] [CrossRef]
- Mestetskiy, L.M.; Zhuravskaya, A. Mirror symmetry detection in digital images. In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications–VISIGRAPP 2020 (4: VISAPP), Valletta, Malta, 27–29 February 2020; Farinella, G.M., Radeva, P., Braz, J., Eds.; Science and Technology Publications: Setúbal, Portugal, 2020; pp. 331–337. [Google Scholar]
- Hauagge, D.C.; Snavely, N. Image matching using local symmetry features. In Conference on Computer Vision and Pattern Recognition (CVPR 2012), Providence, RI, USA, 16–21 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 206–213. [Google Scholar]
- van Gool, L.; Moons, T.; Ungureanu, D.; Pauwels, E. Symmetry from shape and shape from symmetry. Int. J. Robot Res. 1995, 14, 407–424. [Google Scholar] [CrossRef]
- Derrode, S.; Ghorbel, F. Shape analysis and symmetry detection in gray-level objects using the analytical Fourier–Mellin representation. Signal Process. 2004, 84, 25–39. [Google Scholar] [CrossRef]
- Gnutti, A.; Guerrini, F.; Leonardi, D. Combining appearance and gradient information for image symmetry detection. IEEE Trans. Image Process. 2021, 30, 5708–5723. [Google Scholar] [CrossRef] [PubMed]
- Zabrodsky, H.; Peleg, S.; Anvir, D. Hierarchical symmetry. In Proceedings of the 11th IAPR International Conference on Pattern Recognition, The Hague, The Netherlands, 30 August–1 September 1992; IEEE: Piscataway, NJ, USA, 1992. Volume III Conference C: Image, Speech and Signal Analysis. pp. 9–12. [Google Scholar]
- Wang, Y.; Xu, K.; Li, J.; Zhang, H.; Shamir, A.; Liu, L.; Cheng, Z.; Xiong, Y. Symmetry hierarchy of man-made objects. Comput Graph Forum. 2011, 30, 287–296. [Google Scholar] [CrossRef]
- Li, Y.; Mo, K.; Shao, L.; Sung, M.; Guibas, L. Learning 3d part assembly from a single image. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings Part VI 16. Springer International Publishing: New York, NY, USA; pp. 664–682. [Google Scholar]
- Paschalidou, D.; Gool, L.V.; Geiger, A. Learning unsupervised hierarchical part decomposition of 3d objects from a single rgb image. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 23–29 June 2020; Curran Associates, Inc.: Red Hook, NY, USA, 2020; pp. 1060–1070. [Google Scholar]
- Xue, F.; Lu, W.; Chen, Z.; Webster, C.J. From LiDAR point cloud towards digital twin city: Clustering city objects based on Gestalt principles. ISPRS J. Photogramm. Remote Sens. 2020, 167, 418–431. [Google Scholar] [CrossRef]
- Villanueva, A.J.; Marton, F.; Gobetti, E. Symmetry-aware Sparse Voxel DAGs (SSVDAGs) for compression-domain tracing of high-resolution geometric scene. J. Comput. Graph. Tech. (JCGT) 2017, 6, 1–30. [Google Scholar]
- Madoš, B.; Chovancová, E.; Chovanec, M.; Ádám, N. CSVO: Clustered Sparse Voxel Octrees—A Hierarchical Data Structure for Geometry Representation of Voxelized 3D Scenes. Symmetry 2022, 14, 2114. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 4th ed.; Pearson: New York, NY, USA, 2018. [Google Scholar]
- De Berg, M.; van Kreveld, M.; Overmars, M.; Schwarzkopf, O. Computational Geometry: Algorithms and Applications, 2nd ed.; Springer: Berlin, Germany, 2000. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Podgorelec, D.; Kolingerová, I.; Lovenjak, L.; Žalik, B. AHiLS—An Algorithm for Establishing Hierarchy among Detected Weak Local Reflection Symmetries in Raster Images. Symmetry 2024, 16, 442. https://doi.org/10.3390/sym16040442
Podgorelec D, Kolingerová I, Lovenjak L, Žalik B. AHiLS—An Algorithm for Establishing Hierarchy among Detected Weak Local Reflection Symmetries in Raster Images. Symmetry. 2024; 16(4):442. https://doi.org/10.3390/sym16040442
Chicago/Turabian StylePodgorelec, David, Ivana Kolingerová, Luka Lovenjak, and Borut Žalik. 2024. "AHiLS—An Algorithm for Establishing Hierarchy among Detected Weak Local Reflection Symmetries in Raster Images" Symmetry 16, no. 4: 442. https://doi.org/10.3390/sym16040442