
Generalized Neuromorphism and Artificial Intelligence: Dynamics in Memory Space


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- 1.
- Artificial computation through designed algorithms.
- 2.
- Natural computation through the direct utilization of natural processes.
2. Overall Structure and Some Preliminary Considerations
2.1. The Structure of This Article
2.2. Preliminary Methodological Considerations
- 1.
- The priority of AGI: While AGI stands apart from AI, it is worth noting that, historically, AI has been preoccupied with aspects that are now recognized as integral to AGI. Thus, it is essential for a formal framework aspiring to encapsulate the core principles of generalized neuromorphism to prioritize AGI directly, rather than confining itself to the narrower functions within AI, such as those commonly emphasized in contemporary mainstream research, notably machine learning. For a broader critique along these lines, please refer to [38,39].
- 2.
- The primacy of brain science in AGI: Neuroscience and AI research represent distinct fields with their respective methodologies. However, this author aligns with a growing minority of researchers who contend that significant advancements in AGI can only occur once a comprehensive understanding of the functioning of the neocortex in real brains is achieved [40]. Although this paper does not go into detailed discussions of neurobiology, our analysis and proposed framework, generalized neuromorphism, draw inspiration from neuroscience, particularly studies focusing on the cerebral neocortex [12,22].
- 3.
- The integral role played by memory: A fundamental methodological theme in our investigation is the pivotal role of memory in elucidating the connection between brain structure and AGI agents. Specifically, we observe within the intrinsically open thermodynamic nature of the brain both structural and dynamic characteristics that must be deliberately imbued into both artificial brains and core AGI agents in the future (see Figure 2). Memory, a key aspect of complex open systems, significantly influences both the structure and function of living and intelligent systems alike [41]. This aspect will be underscored throughout our study at various levels, including the review section, the proposed formalism of generalized neuromorphism, and the applications and implementation segment.
- 4.
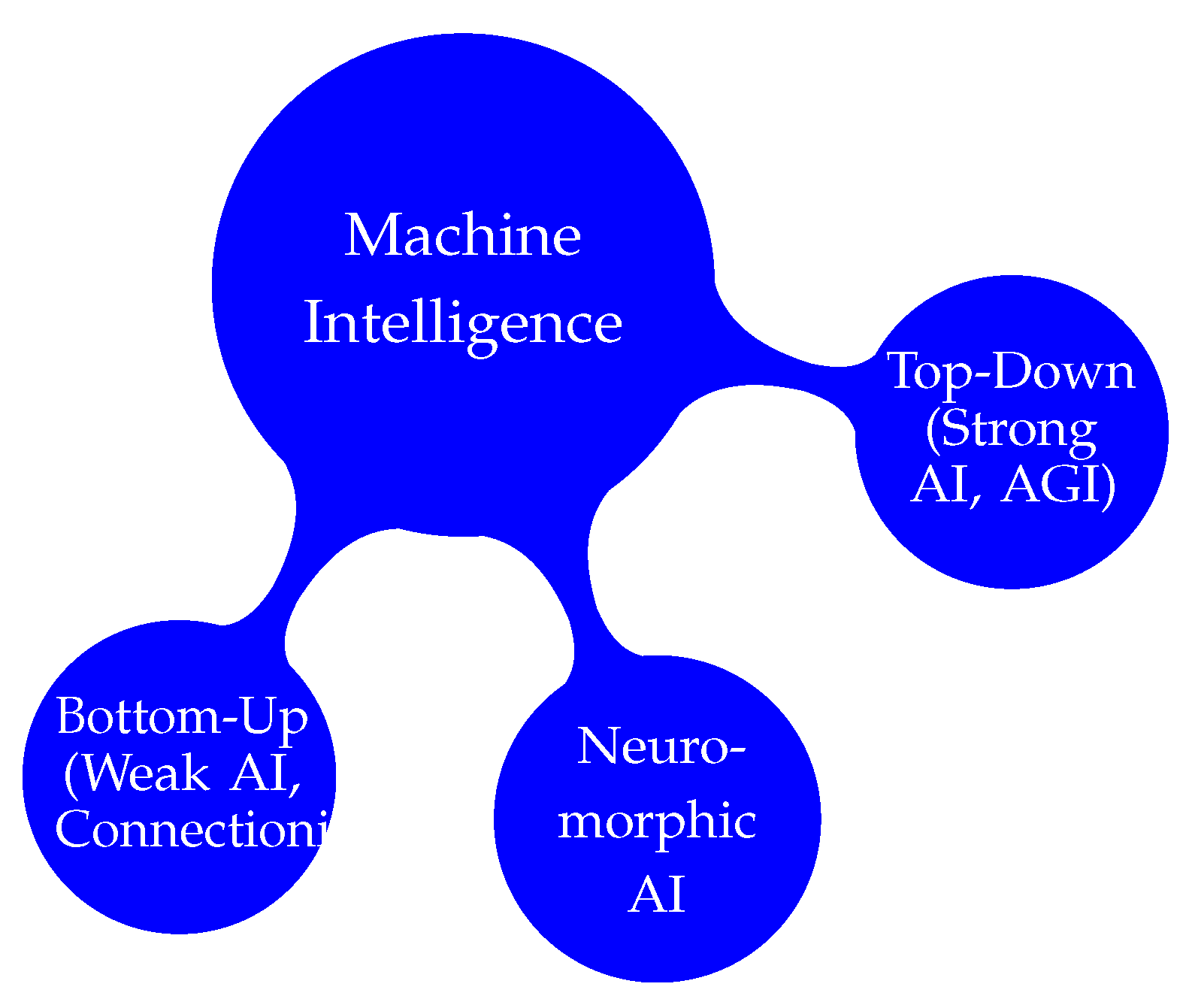
- How AGI should be approached: One of the central inquiries addressed in this study pertains to the most effective approach for achieving AGI. After examining the traditional top-down and bottom-up approaches, we support a novel synthesis that draws inspiration from both and is informed by our current understanding of brain function. This approach aligns with the aspiration of neuroscience to “reverse engineer the brain” [8] and subsequently employs engineering principles to construct an artificial brain [9]. We argue that pursuing the development of artificial brains represents a promising path toward realizing AGI. Generalized neuromorphism emerges as a theoretical framework that offers insights into the feasibility of this endeavor.
- 5.
- Avoiding overemphasis on machine learning: While our presentation addresses ML as an essential component of the bottom-up approach to AGI, we aim to avoid overemphasis on it. While acknowledging the significant progress made in ML, particularly within deep learning paradigms, we align with a growing chorus of critical voices that highlight the fundamental inadequacies of conventional ML, particularly the ANN framework, in solving the problem of general intelligence [38,39,40,42]. We advocate for considering other directions of research, such as classical and quantum brain theory, non-Markovian dynamical systems, and dissipative structures, to shape the future direction of research outlined in this paper. Hence, in our presentation, training and optimization constitute only a portion of the overarching formalism of generalized neuromorphism.
3. Revisiting Classical AI in Light of Neuromorphism
3.1. What Is Artificial Intelligence?
- 1.
- Knowledge representation.
- 2.
- Reasoning with these representations (information processing and deduction).
- 3.
- Learning from past and current experiences to adapt ongoing reasoning (and knowledge representations).
- 4.
- Autonomy via self-organization or the self-sustainability of the entire system, potentially leading to replication and reproduction.
3.2. What Is Neuromorphism?
4. Generalized Neuromorphism
4.1. Main Features of Neuromorphism
- 1.
- Understanding the structure and functions of the brain.
- 2.
- Implementing this understanding via specialized neuromorphic (brain-inspired) hardware.
- 1.
- The AI system is an open system.
- 2.
- The AI system must make use of intrinsic memory elements.
- 3.
- The AI system processes information in space and time.
4.2. The Function of Memory and Non-Markovianity in Generalized Neuromorphism Viewed as a Stochastic Open System
5. The Structure and Dynamics of Memory Space
5.1. Structure of Memory States in Generalized Neuromorphism
5.2. The Dynamical Map
5.3. The Dynamics of Events with Intrinsic Memory: The Local Theory
5.4. The Dynamics of Events with Intrinsic Memory: The Global Theory
6. Physical Realization and the Prospect for Quantum Generalized Neuromorphism
6.1. Cognitive AGI and Nonlocality
6.2. Quantum Biology, Quantum AI, the Quantum Brain, and the Prospect for Quantum Neuromorphism
6.3. Quantum GNS Circuits
7. Generalized Neuromorphism and the Dynamic Approach to Intelligent Systems Design
7.1. Incorporating Machine Intelligence into the Dynamic Multi-Agent Assemblage
7.2. The Dynamic Approach to Cognition
8. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AGI | Artificial general intelligence |
| ANN | Artificial Neural Network |
| ASIC | Application-Specific IC |
| GKSL | Gorini–Kossakowski–Sudarshan–Lindblad |
| SNN | Spiking neural network |
| TPU | Tensor Processing Unit |
| IIA | Interacting intelligent agent |
| PE | Processing element/event |
| HMM | Hidden Markov Model |
| ML | Machine learning |
| SD | Stochastic dynamic/dynamics |
| ND | Neurodynamic/neurodynamics |
| GNM | Generalized neuromorphic/neuromorphism |
| GPU | Graphical Processing Unit |
| GA | Genetic Algorithm |
| QBD | Quantum brain dynamics |
| QND | Quantum neurodynamics |
| PSO | Particle Swarm Optimization |
References
- Turing, A.M. Computing machinery and intelligence. Mind 1950, LIX, 433–460. [Google Scholar] [CrossRef]
- Newell, A.; Simon, H.A. Computer science as empirical inquiry: Symbols and search. Commun. ACM 1976, 19, 113–126. [Google Scholar] [CrossRef]
- Mikki, S. Artificial General Intelligence and Noncomputability: A Dynamical Framework. J. Artif. Intell. Conscious. 2023, 10, 71–101. [Google Scholar] [CrossRef]
- Wolfram, S. A New Kind Of Science; Wolfram Media: Champaign, IL, USA, 2002. [Google Scholar]
- Nielsen, M.; Chuang, I.L. Quantum Computation and Quantum Information; Cambridge University Press: Cambridge, NY, USA, 2010. [Google Scholar]
- Merolla, P.; Arthur, J.; Alvarez-Icaza, R.; Cassidy, A.; Sawada, J.; Akopyan, F.; Jackson, B.; Imam, N.; Guo, C.; Nakamura, Y.; et al. Artificial brains: A million spiking-neuron integrated circuit with a scalable communication network and interface. Science 2014, 345, 668–673. [Google Scholar] [CrossRef] [PubMed]
- Teich, J. Hardware/Software Codesign: The Past, the Present, and Predicting the Future. Proc. IEEE 2012, 100, 1411–1430. [Google Scholar] [CrossRef]
- Sterling, P.; Laughlin, S. Principles of Neural Design; The MIT Press: London, UK, 2017. [Google Scholar]
- Ross Ashby, W. Design for a Brain, 2nd ed.; Chapman and Hall: London, UK, 1966. [Google Scholar]
- Grossberg, S. Conscious Mind, Resonant Brain: How Each Brain Makes a Mind; Oxford University Press: New York, NY, USA, 2021. [Google Scholar]
- Kelly, K. The Inevitable: Understanding the 12 Technological Forces That Will Shape Our Future; Penguin Books: New York, NY, USA, 2017. [Google Scholar]
- Rolls, E. Cerebral Cortex: Principles of Operation; Oxford University Press: Oxford, UK; New York, NY, USA, 2016. [Google Scholar]
- Haykin, S. Neural Networks and Learning Machines; Prentice Hall/Pearson: New York, NY, USA, 2009. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; The MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Bandi, N.; Chakraborty, A. The World as a Neural Network: The Story of AI and Our Future; Nottion Press: Chennai, India, 2021. [Google Scholar]
- Vanchurin, V. The World as a Neural Network. Entropy 2020, 22, 1210. [Google Scholar] [CrossRef] [PubMed]
- Grossberg, S. (Ed.) Neural Networks and Natural Intelligence; MIT Press: Cambridge, MA, USA, 1988. [Google Scholar]
- Maass, W. (Ed.) Pulsed Neural Networks; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Lem, S. Imaginary Magnitude; Harcourt Brace Jovanovich: San Diego, CA, USA, 1985. [Google Scholar]
- McCulloch, W.S.; Pitts, W. A logical calculus of the ideas immanent in nervous activity. Bull. Math. Biophys. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Koch, C. Biophysics of Computation: Information Processing in Single Neurons; Oxford University Press: New York, NY, USA, 1999. [Google Scholar]
- Rolls, E.; Deco, G. The Noisy Brain: Stochastic Dynamics as a Principle of Brain Function; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Hoffmeyer, J. Biosemiotics: An Examination into the Signs of Life and the Life of Signs; University of Scranton Press: Scranton, PA, USA, 2008. [Google Scholar]
- Favareau, D. (Ed.) Essential Readings in Biosemiotics: Anthology and Commentary; Springer: Dordrecht, The Netherlands; New York, NY, USA, 2010. [Google Scholar]
- Barbieri, M. (Ed.) The Codes of Life: The Rules of Macroevolution; Springer Science + Business Media: New York, NY, USA, 2008. [Google Scholar]
- Barbieri, M. The Semantic Theory of Evolution; Routledge: London, UK, 2020. [Google Scholar]
- Lindenberg, F. Dedicated Digital Processors: Methods in Hardware/Software System Design; J. Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Bertels, K. Hardware/Software Co-Design for Heterogeneous Multi-Core Platforms; Springer: Dordrecht, The Netherlands; New York, NY, USA, 2012. [Google Scholar]
- Cardoso, J.; Hübner, M. Reconfigurable Computing: From FPGAs to Hardware/Software Codesign; Springer: New York, NY, USA, 2011. [Google Scholar]
- Pang, B.; Nijkamp, E.; Wu, Y.N. Deep learning with TensorFlow: A review. J. Educ. Behav. Stat. 2020, 45, 227–248. [Google Scholar] [CrossRef]
- Geron, A. Hands-On Machine Learning with Scikit-Learn and TensorFlow; O’Reilly Media: Sebastopol, CA, USA, 2017. [Google Scholar]
- Persano, J.; Mikki, S.; Antar, Y. Gradient Population Optimization: A Tensorflow-Based Heterogeneous Non-Von-Neumann Paradigm for Large-Scale Search. IEEE Access 2018, 6, 77097–77122. [Google Scholar] [CrossRef]
- Zheng, N.; Mazumder, P. Learning in Energy-Efficient Neuromorphic Computing: Algorithm and Architecture Co-Design; Wiley-IEEE Press: Hoboken, NJ, USA, 2020. [Google Scholar]
- Breuer, H.P.; Petruccione, F. The Theory of Open Quantum Systems; Oxford University Press: Oxford, NY, USA, 2002. [Google Scholar]
- Kosko, B. Neural Networks and Fuzzy Systems: A Dynamical Systems Approach to Machine Intelligence; Prentice Hall: New Delhi, India, 1992. [Google Scholar]
- Gorini, V.; Kossakowski, A.; Sudarshan, E.C.G. Completely Positive Dynamical Semigroups of N Level Systems. J. Math. Phys. 1976, 17, 821–825. [Google Scholar] [CrossRef]
- Prigogine, I. Non-Equilibrium Statistical Mechanics; Dover Publications: Mineola, NY, USA, 2017. [Google Scholar]
- Larson, E.J. The Myth of Artificial Intelligence: Why Computers Can’t Think the Way We Do; Harvard University Press: London, UK, 2022. [Google Scholar]
- Marcus, G.; Davis, E. Rebooting AI: Building Artificial Intelligence We Can Trust; Ballantine Books: New York, NY, USA, 2019. [Google Scholar]
- Hawkins, J. A Thousand Brains: A New Theory of Intelligence; Basic Books: London, UK, 2021. [Google Scholar]
- Ehresmann, A.C.; Vanbremeersch, J.P. Studies in multidisciplinarity. In Memory Evolutive Systems; Hierarchy, Emergence, Cognition; Elsevier Science: London, UK, 2007; Volume 4. [Google Scholar]
- Pearl, J.; MacKenzie, D. The Book of Why: The New Science of Cause and Effect; Basic Books: La Vergne, TN, USA, 2020. [Google Scholar]
- Dyson, F. Origins of Life; Cambridge University Press: Cambridge, UK; New York, NY, USA, 1999. [Google Scholar]
- Schrodinger, E. What Is Life? Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013. [Google Scholar]
- Neumann, J. Collected Works: Design of Computers, Theory of Automata and Numerical Analysis; Pergamon Pr: Oxford, UK, 1961; Volume 5. [Google Scholar]
- Jonas, H. The Phenomenon of Life: Toward a Philosophical Biology; Northwestern University Press: Evanston, IL, USA, 2001. [Google Scholar]
- Teuscher, C. Turing’s Connectionism; Discrete Mathematics and Theoretical Computer Science; Springer: London, UK, 2001. [Google Scholar]
- Cooper, S.B.; Hodges, A. (Eds.) The Once and Future Turing; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Clarke, A.C. 2001: A Space Odyssey; New American Library: New York, NY, USA, 1968. [Google Scholar]
- Penrose, R. Shadows of the Mind: A Search for the Missing Science of Consciousness; Oxford University Press: Oxford, NY, USA, 1994. [Google Scholar]
- Feynman, R. Feynman Lectures on Computation; Perseus Books: Cambridge, MA, USA, 1999. [Google Scholar]
- Prigogine, I.; Stengers, I. Order Out of Chaos: Man’s New Dialogue with Nature; Bantam Books: Toronto, ON, Canada; New York, NY, USA, 1984. [Google Scholar]
- Gilmore, R. The Topology of Chaos: Alice in Stretch and Squeezeland; Wiley-VCH John Wiley distributor: Chichester, UK, 2011. [Google Scholar]
- Deacon, T. Incomplete Nature: How Mind Emerged from Matter; W. W. Norton & Company: New York, NY, USA, 2016. [Google Scholar]
- Prigogine, I. From Being to Becoming: Time and Complexity in the Physical Sciences; W.H. Freeman: San Francisco, CA, USA, 1980. [Google Scholar]
- Nicolis, G.; Lefever, R. (Eds.) Advances in Chemical Physics: Membranes, Dissipative Structures and Evolution; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1975. [Google Scholar]
- Prigogine, I. Time, Structure, and Fluctuations. Science 1978, 201, 777–785. [Google Scholar] [CrossRef] [PubMed]
- Nestruev, J. Smooth Manifolds and Observables; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Miguel-Tomé, S.; Sánchez-Lázaro, L.; Alonso-Romero, L. Fundamental Physics and Computation: The Computer-Theoretic Framework. Universe 2022, 8, 40. [Google Scholar] [CrossRef]
- Lang, S. Introduction to Differentiable Manifolds; Interscience: New York, NY, USA, 1962. [Google Scholar]
- Lee, J. Introduction to Smooth Manifolds; Springer: New York, NY, USA; London, UK, 2012. [Google Scholar]
- Papoulis, A.; Unnikrishna Pillai, S. Probability, Random Variables and Stochastic Processes, 4th ed.; McGraw-Hill Professional: New York, NY, USA, 2002. [Google Scholar]
- Zeidler, E. Quantum Field Theory I: Basics in Mathematics and Physics; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Arnold, V.I. Ergodic Problems of Classical Mechanics; Addison-Wesley: Redwood City, CA, USA, 1988. [Google Scholar]
- Liggett, T.M. Graduate Studies in Mathematics. In Continuous time Markov Processes; American Mathematical Society: Providence, RI, USA, 2010. [Google Scholar]
- Rivas, A.; Huelga, S. Open Quantum Systems: An Introduction; SpringerBriefs in Physics; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Mikki, S. On the Topological Structure of Nonlocal Continuum Field Theories. Foundations 2022, 2, 20–84. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive Dynamic Systems; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Mikki, S.; Kishk, A. Nonlocal Electromagnetic Media: A Paradigm for Material Engineering. In Passive Microwave Components and Antennas; InTech: London, UK, 2010. [Google Scholar]
- Penrose, R. The Road to Reality: A Complete Guide to the Laws of the Universe; Vintage Books: New York, NY, USA, 2007. [Google Scholar]
- Ginzburg, V.L. The Development of Crystal Optics with Allowance for Spatial Dispersion. Sov. Phys. Uspekhi 1973, 15, 839–841. [Google Scholar] [CrossRef]
- Ginzburg, V.L. Theoretical Physics and Astrophysics; Pergamon Press: Oxford, NY, USA, 1979. [Google Scholar]
- JiSheng, C.; JiaRong, L. The Boundary Value Problem and the Nonlinear Spatial Dispersion in Collisionless Quark-Gluon Plasma. Commun. Theor. Phys. 2000, 34, 251–260. [Google Scholar] [CrossRef]
- Cho, K. Optical Response of Nanostructures: Microscopic Nonlocal Theory; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2003. [Google Scholar]
- Mikki, S.; Kishk, A. A Symmetry-Based Formalism for the Electrodynamics of Nanotubes. Prog. Electromagn. Res. 2008, 86, 111–134. [Google Scholar] [CrossRef]
- Mikki, S.; Kishk, A. Electromagnetic scattering by multi-wall carbon nanotubes. Prog. Electromagn. Res. B 2009, 17, 49–67. [Google Scholar] [CrossRef]
- Cho, K. Reconstruction of Macroscopic Maxwell Equations: A Single Susceptibility Theory; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Keller, O. Quantum Theory of Near-Field Electrodynamics; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2011. [Google Scholar]
- Frohlich, H. Long-range coherence and energy storage in biological systems. Int. J. Quantum Chem. 1968, 2, 641–649. [Google Scholar] [CrossRef]
- Seuren, P. Language in Cognition: Language from Within; Oxford University Press: Oxford, NY, USA, 2009; Volume I. [Google Scholar]
- Freeman, W. Mass Action in the Nervous System: Examination of the Neurophysiological Basis of Adaptive Behavior through the EEG; Academic Press: New York, NY, USA, 1975. [Google Scholar]
- Lashley, K. Brain Mechanisms and Intelligence: A Quantitative Study of Injuries to the Brain; Dover: New York, NY, USA, 1963. [Google Scholar]
- Kandel, E.R.; Dudai, Y.; Mayford, M. The Molecular and Systems Biology of Memory. Cell 2014, 157, 163–186. [Google Scholar] [CrossRef]
- Beck, F.; Eccles, J.C. Quantum processes in the brain. In Neural Basis of Consciousness; Osaka, N., Ed.; John Benjamins Publishing Company: Amsterdam, The Netherlands, 2003; pp. 141–165. [Google Scholar]
- Hameroff, S.; Penrose, R. Conscious Events as Orchestrated Space-Time Selections. NeuroQuantology 2007, 1, 10–35. [Google Scholar] [CrossRef]
- Stapp, H.P. Mind, Matter and Quantum Mechanics, 3rd ed.; The Frontiers Collection; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Stapp, H.P. Mindful Universe, 2nd ed.; Frontiers Collection; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Kauffman, S. Investigations; Oxford University Press: Oxford, NY, USA, 2000. [Google Scholar]
- Penrose, R. Fashion, Faith, and Fantasy in the New Physics of the Universe; Princeton University Press: Princeton, NJ, USA, 2016. [Google Scholar]
- Penrose, R. On Attempting to Model the Mathematical Mind. In The Once and Future Turing; Cooper, S.B., Hodges, A., Eds.; Cambridge University Press: Cambridge, UK, 2016; pp. 361–378. [Google Scholar]
- Penrose, R. The Emperor’s New Mind: Concerning Computers, Minds and the Laws of Physics; Oxford University Press: Oxford, UK, 2016. [Google Scholar]
- Vitiello, G. My Double Unveiled: The Dissipative Quantum Model of Brain; Advances in Consciousness Research; John Benjamins Publishing: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Feynman, R. The Feynman Lectures on Physics, Volume III: Quantum Mechanics; Basic Books: New York, NY, USA, 2011. [Google Scholar]
- Bell, J.S. Speakable and Unspeakable in Quantum Mechanics: Collected Papers on Quantum Philosophy; Cambridge University Press: Cambridge, NY, USA, 2004. [Google Scholar]
- Khrennikov, A.Y. Probability and Randomness: Quantum versus Classical; Imperial College Press: London, UK, 2016. [Google Scholar]
- Neumann, J. Mathematical Foundations of Quantum Mechanics; Princeton University Press: Princeton, NJ, USA, 2018. [Google Scholar]
- Li, C.F.; Guo, G.C.; Piilo, J. Non-Markovian quantum dynamics: What does it mean? EPL (Europhys. Lett.) 2019, 127, 50001. [Google Scholar] [CrossRef]
- Milz, S.; Modi, K. Quantum Stochastic Processes and Quantum non-Markovian Phenomena. PRX Quantum 2021, 2, 030201. [Google Scholar] [CrossRef]
- Rivas, Á.; Huelga, S.F.; Plenio, M.B. Quantum non-Markovianity: Characterization, quantification and detection. Rep. Prog. Phys. 2014, 77, 094001. [Google Scholar] [CrossRef] [PubMed]
- Barber, D. Bayesian Reasoning and Machine Learning; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Lindblad, G. On the generators of quantum dynamical semigroups. Commun. Math. Phys. 1976, 48, 119–130. [Google Scholar] [CrossRef]
- Bahns, D.; Pohl, A.; Witt, I. (Eds.) Open Quantum Systems: A Mathematical Perspective; Springer International Publishing: New York, NY, USA, 2019. [Google Scholar]
- Banerjee, S. Open Quantum Systems: Dynamics of Nonclassical Evolution; Springer: Singapore, 2018. [Google Scholar]
- Weiss, G. (Ed.) Multiagent Systems, 2nd ed.; Intelligent Robotics & Autonomous Agents Series; MIT Press: London, UK, 2013. [Google Scholar]
- Minsky, M. The Society of Mind; A Touchstone book; Pocket Books: New York, NY, USA, 1988. [Google Scholar]
- Kelly, K. Out of Control: The New Biology of Machines, Social Systems, and the Economic World; Addison-Wesley: Reading, MA, USA, 1995. [Google Scholar]
- Eberhart, R.C.; Shi, Y.; Kennedy, J. Swarm Intelligence; The Morgan Kaufmann Series in Artificial Intelligence; Morgan Kaufmann: Oxford, UK, 2001. [Google Scholar]
- Mikki, S.; Kishk, A. Particle Swarm Optimization: A Physics-Based Approach; Morgan & Claypool Publishers: San Rafael, CA, USA, 2008. [Google Scholar]
- Misra, B.; Prigogine, I.; Courbage, M. From deterministic dynamics to probabilistic descriptions. Phys. A Stat. Mech. Appl. 1979, 76, 3607–3611. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction, 2nd ed.; Adaptive Computation and Machine Learning series; Bradford Books: Cambridge, MA, USA, 2018. [Google Scholar]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mikki, S. Generalized Neuromorphism and Artificial Intelligence: Dynamics in Memory Space. Symmetry 2024, 16, 492. https://doi.org/10.3390/sym16040492
Mikki S. Generalized Neuromorphism and Artificial Intelligence: Dynamics in Memory Space. Symmetry. 2024; 16(4):492. https://doi.org/10.3390/sym16040492
Chicago/Turabian StyleMikki, Said. 2024. "Generalized Neuromorphism and Artificial Intelligence: Dynamics in Memory Space" Symmetry 16, no. 4: 492. https://doi.org/10.3390/sym16040492
APA StyleMikki, S. (2024). Generalized Neuromorphism and Artificial Intelligence: Dynamics in Memory Space. Symmetry, 16(4), 492. https://doi.org/10.3390/sym16040492