
Feasibility Study on Active Structural Attenuation: Addressing Multiband Vibration in Automotive Vehicles on 2D Asymmetric Structures with a Faulty Horizontal Actuator

Abstract
:1. Introduction
1.1. Research Background
1.2. Review of Previous Works
1.3. Research Purpose
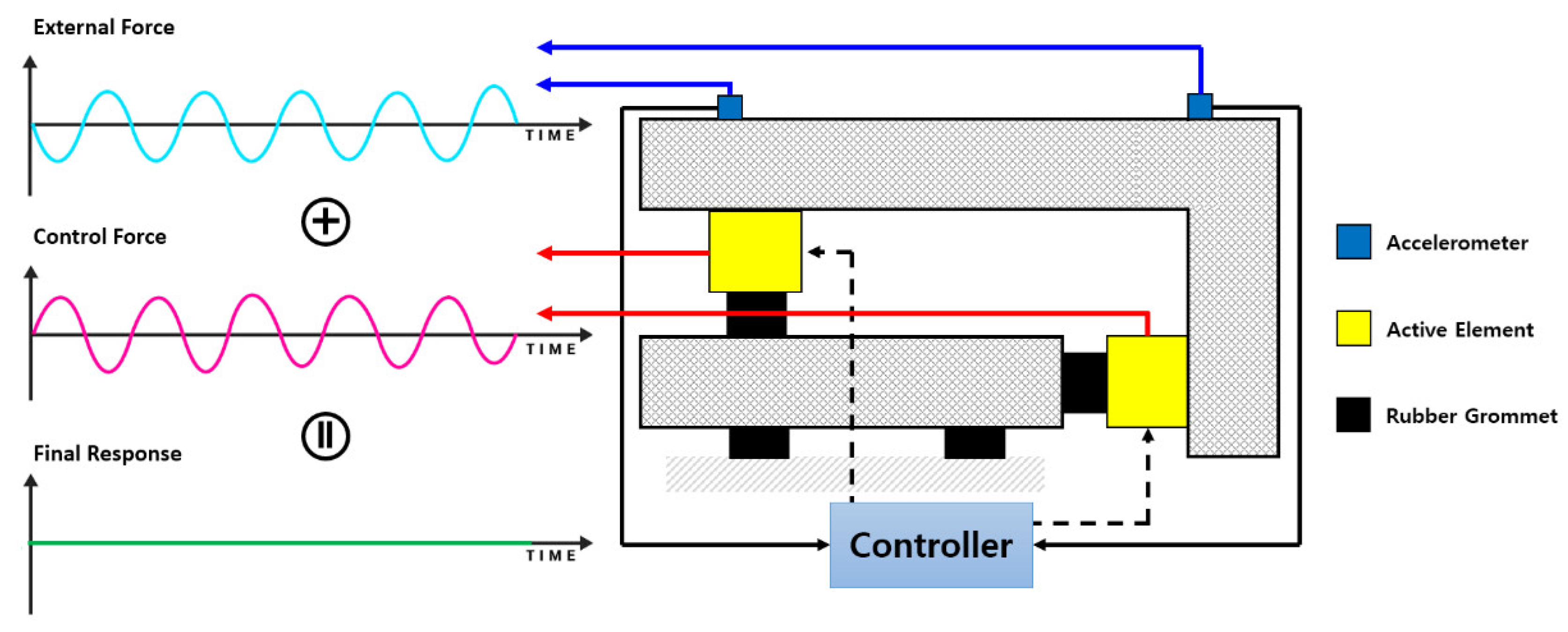
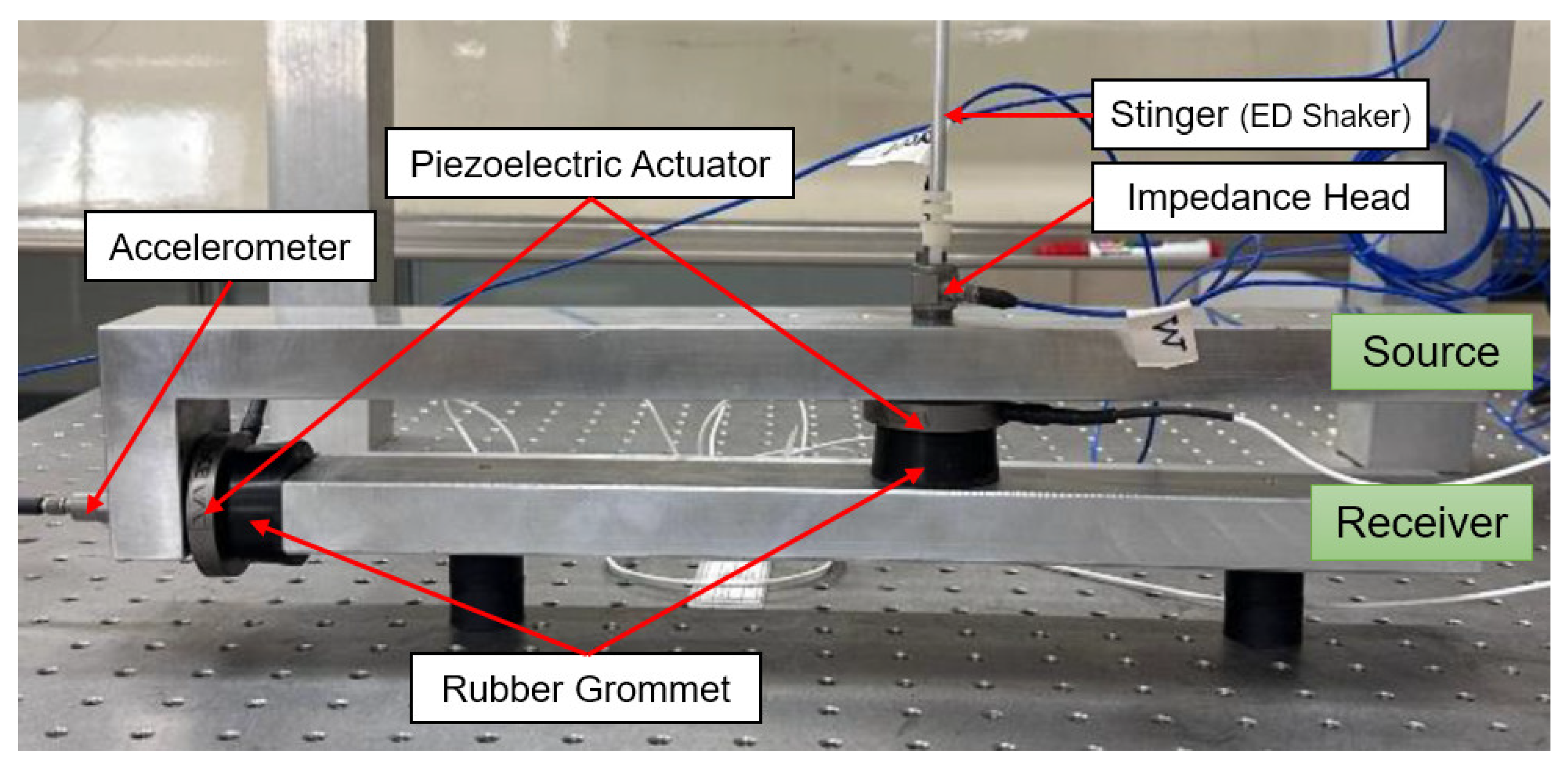
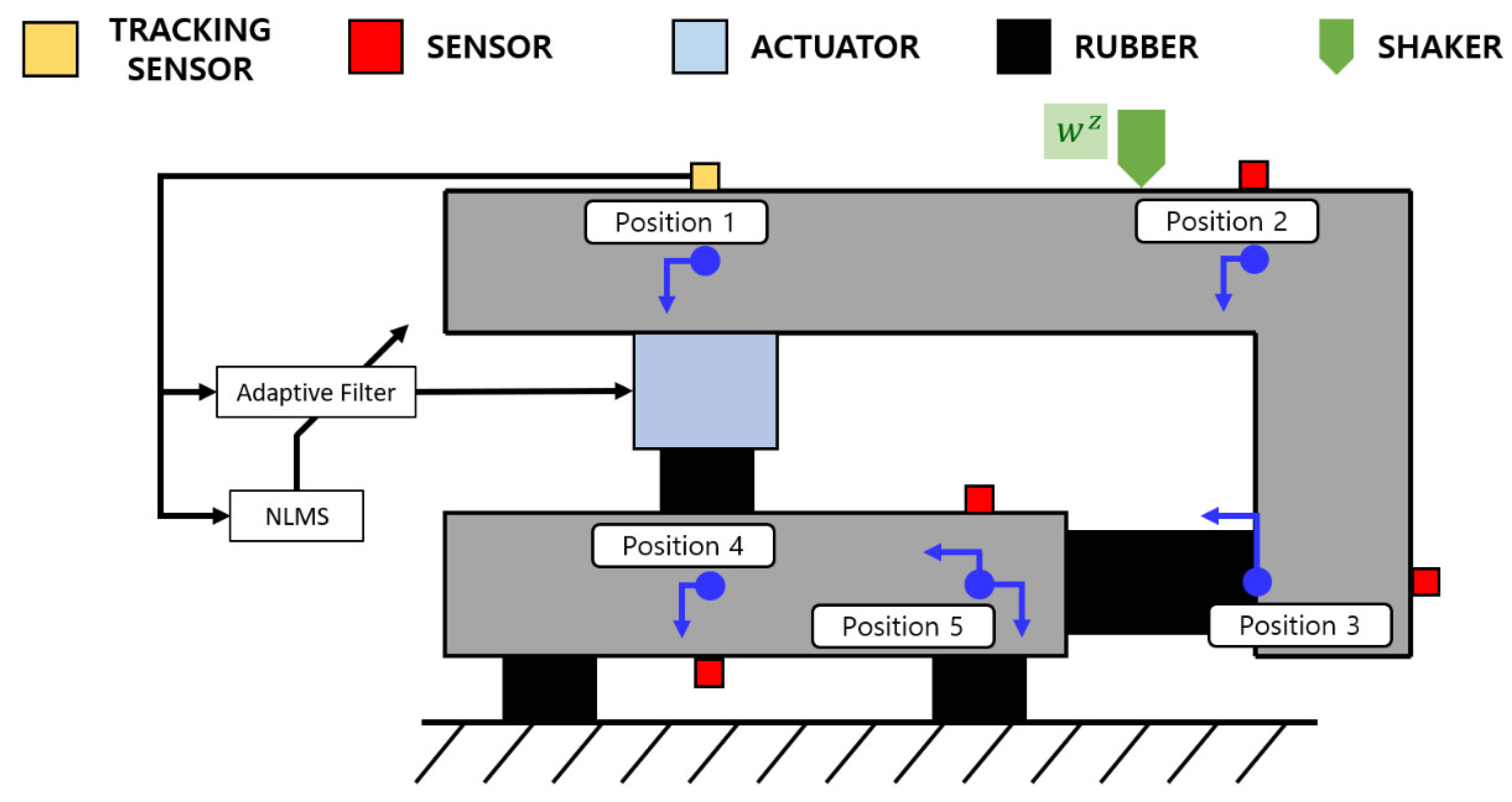
2. Active Mounting Structure for Vibration Attenuation
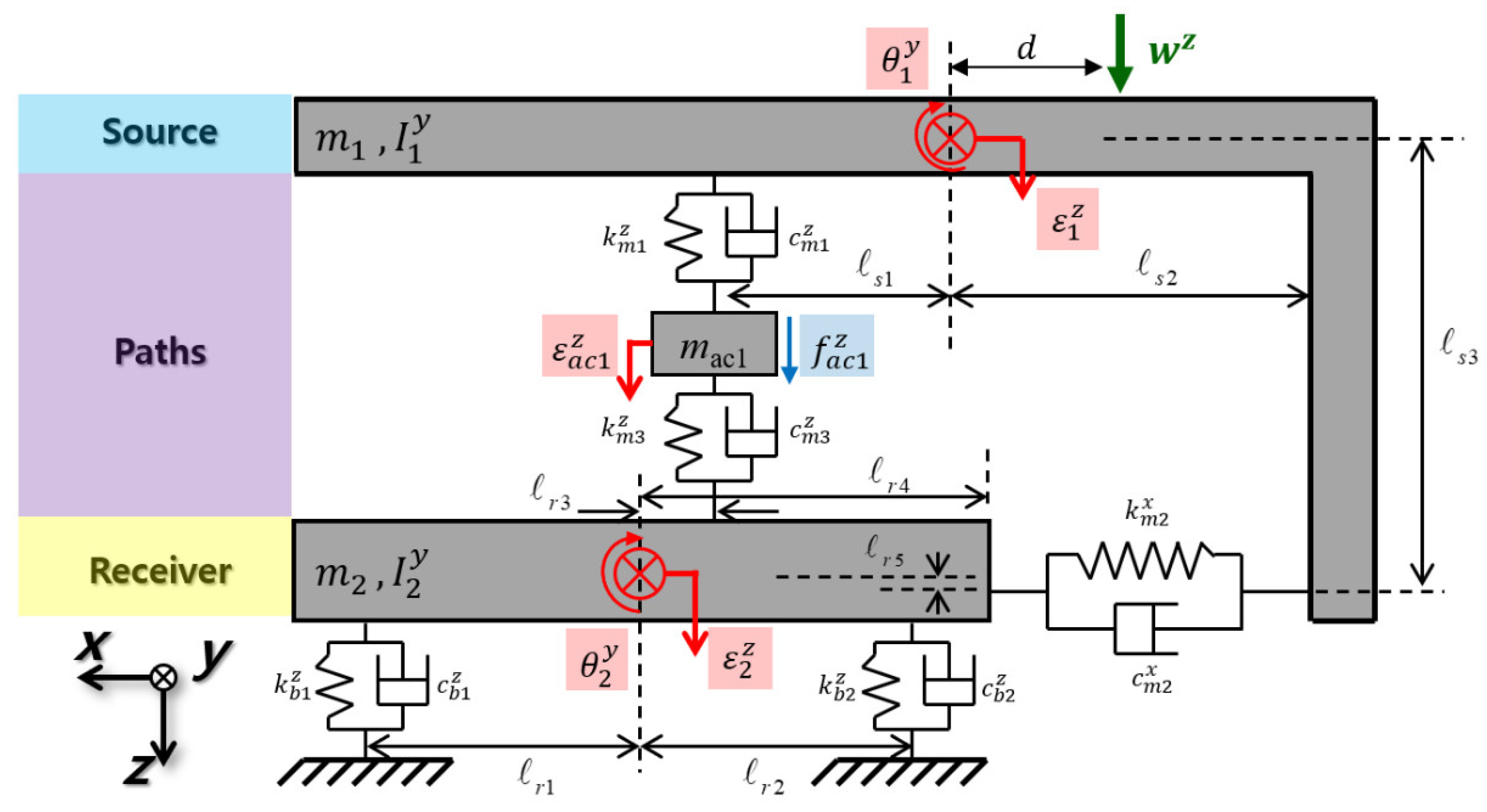
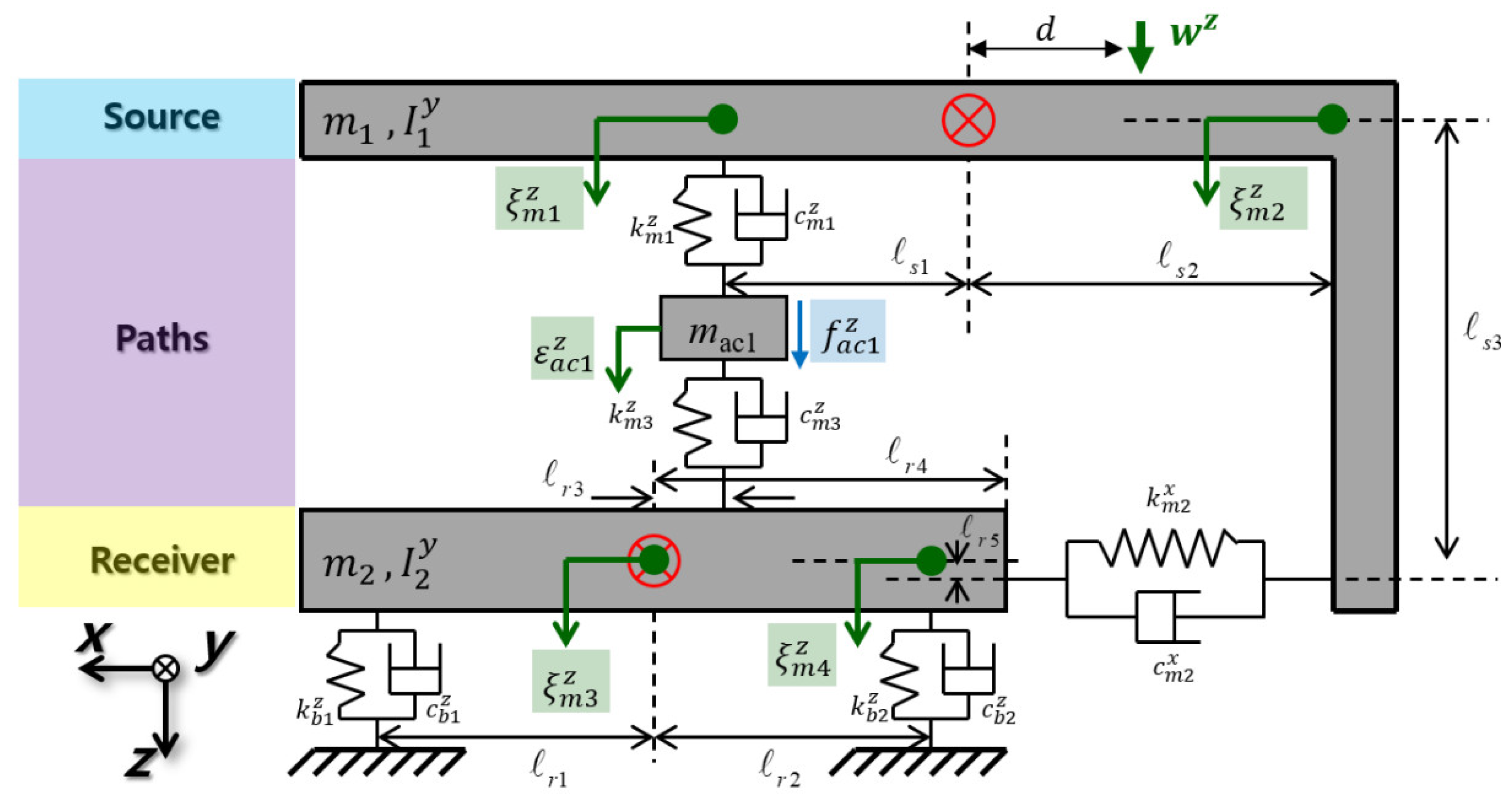
2.1. Mathematical Modeling
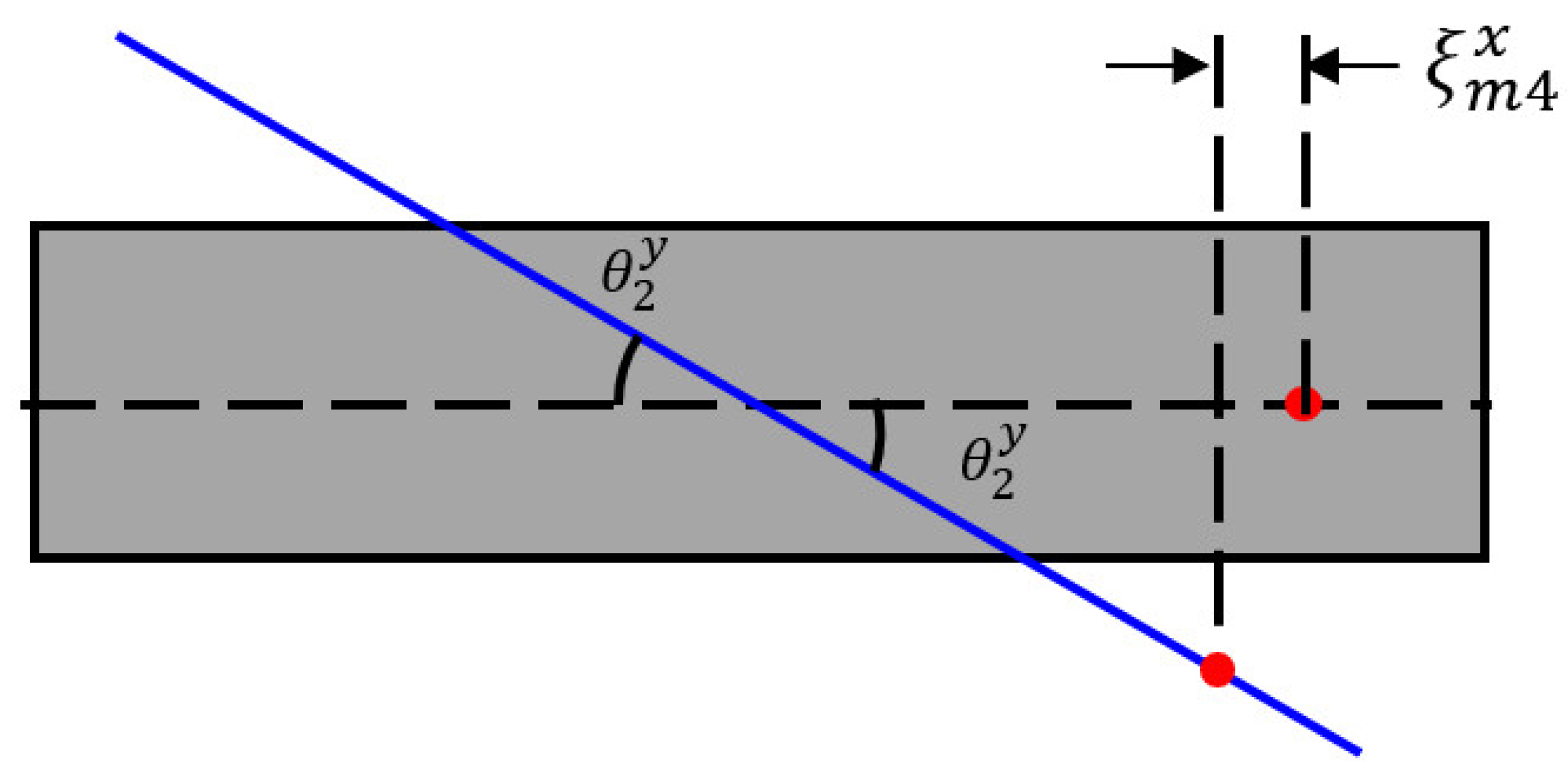
2.2. Response Trend in the Horizontal Direction
2.3. Input Quantification for Active Elements
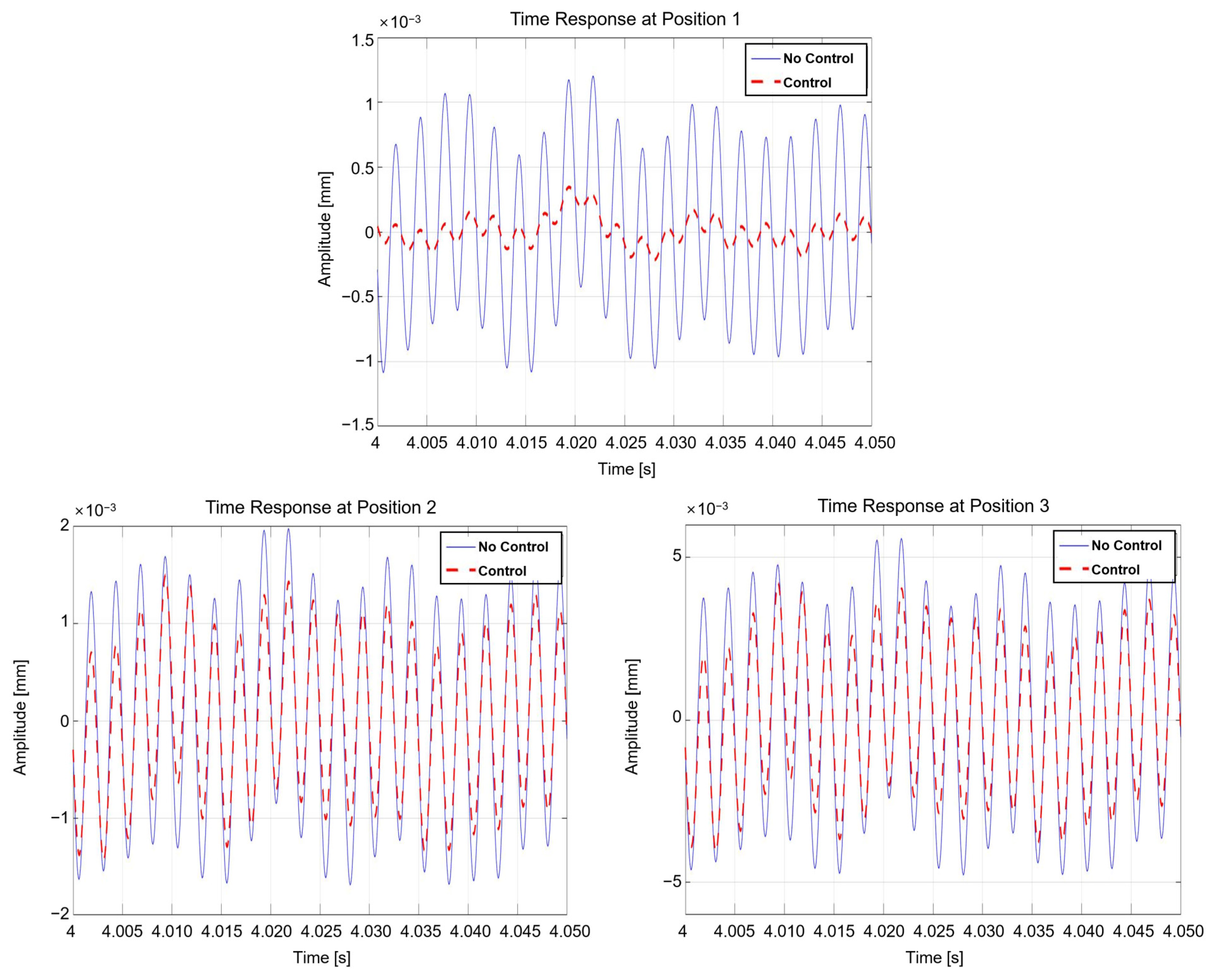
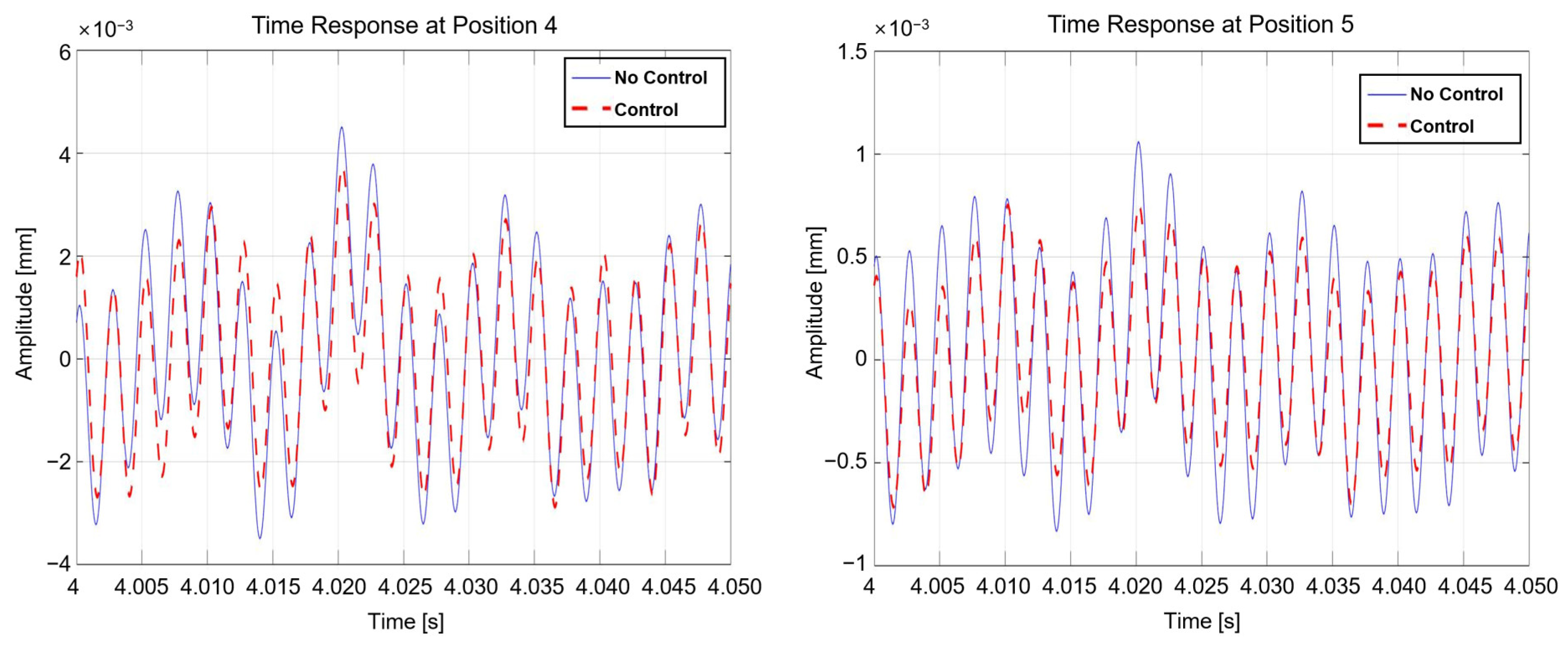
3. Simulation
3.1. Control via Quantified Input
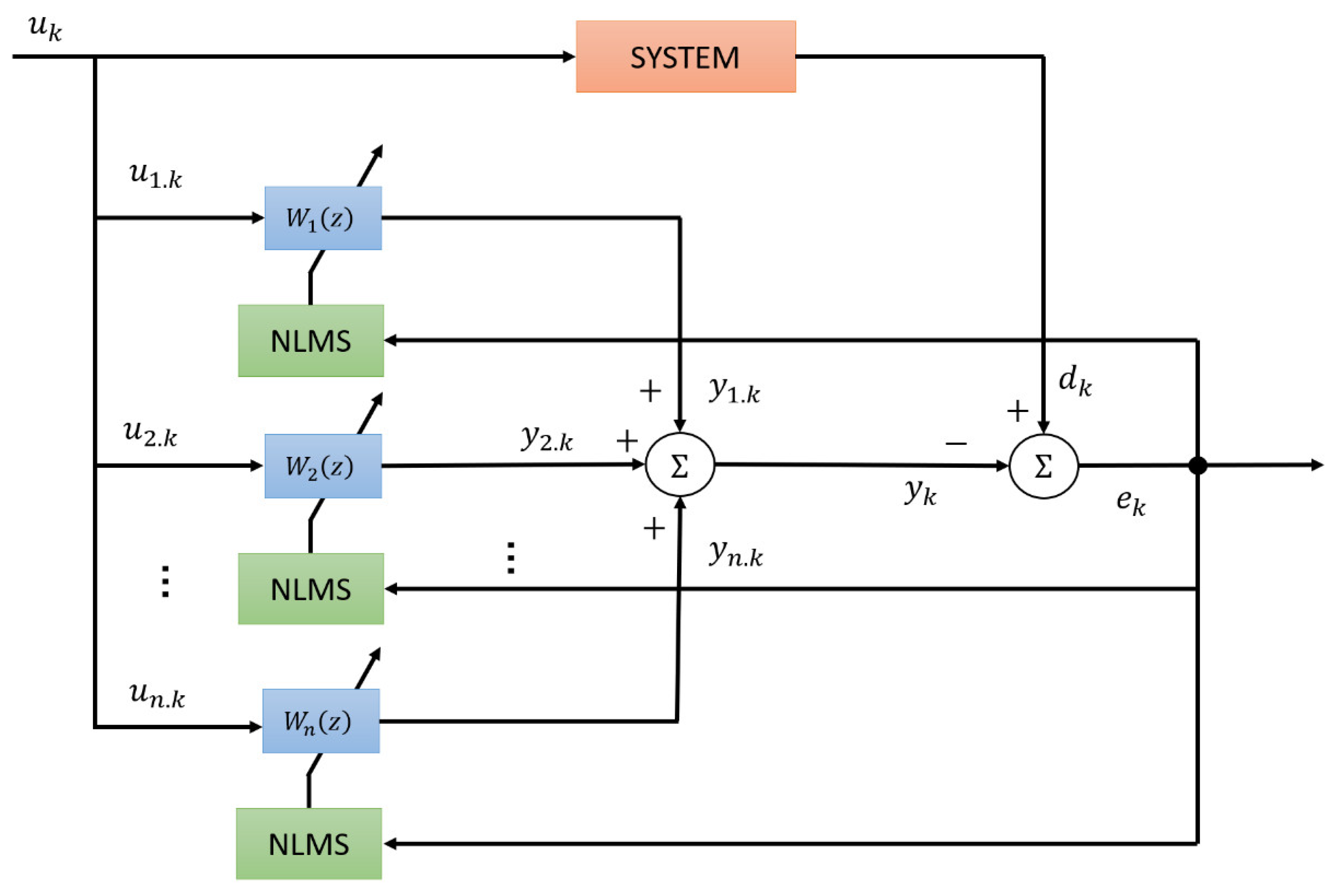
3.2. Control via the Adaptive Filtering Algorithm
4. Conclusions
- (1)
- An exhaustive technology for analyzing the motion of mounting systems is proposed. By integrating analytical modeling and input quantification for actuators, this methodology broadens its scope and facilitates its implementation across various mounting systems.
- (2)
- The present research examines and documents the interplay between lateral and vertical vibrations of a structure that draws inspiration from an automotive mount. Prior investigations have mainly concentrated on the manner of actuation and unidirectional vibration attenuation. In addition, an assessment and comparison are performed regarding the effectiveness of vibration attenuation corresponding to the particular locations utilized to measure the actuator input. Furthermore, this could aid in the formulation of the actuation strategy.
- (3)
- The vibration reduction efficacy of the suggested structure is examined by applying multi-spectral stimulations to relatively complex vibration signals.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, Y.; Naganathan, N.G.; Dukkipati, R.B. A literature review of automotive vehicle engine mounting systems. Mech. Mach. Theory 2001, 36, 123–142. [Google Scholar] [CrossRef]
- Hosseini, M.; Arzanpour, S.; Golnaraghi, F.; Parameswaran, A.M. Solenoid actuator design and modeling with application in engine vibration isolators. J. Vib. Control. 2012, 19, 1015–1023. [Google Scholar] [CrossRef]
- Kraus, R.; Herold, S.; Millitzer, J.; Jungblut, T. Development of active engine mounts based on piezo actuators. ATZ Peer Re-View 2014, 116, 50–55. [Google Scholar] [CrossRef]
- Chae, H.D.; Choi, S.B. A new vibration isolation bed stage with magneto-rheological dampers for ambulance vehicles. Smart Mater. Struct. 2015, 24, 0964–1726. [Google Scholar] [CrossRef]
- Yang, T.J.; Suai, Z.J.; Sun, Y.; Zhu, M.G.; Xiao, Y.H.; Liu, X.G.; Du, J.T.; Jin, G.Y.; Liu, Z.G. Active vibration isolation system for a diesel engine. Noise Control. Engr. J. 2012, 60, 267–282. [Google Scholar] [CrossRef]
- Jeon, J.; Han, Y.M.; Lee, D.Y.; Choi, S.B. Vibration control of the engine body of a vehicle utilizing the magneto-rheological roll mount and the piezostack right-hand mount. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1562–1577. [Google Scholar] [CrossRef]
- Jiang, J.; Gao, W.; Wang, L.; Teng, Z.; Liu, Y. Active vibration control based on modal controller considering structure actuator interaction. J. Mech. Sci. Technol. 2018, 32, 3515–3521. [Google Scholar] [CrossRef]
- Fakhari, V.; Choi, S.B.; Cho, C.H. A new robust adaptive controller for vibration control of active engine mount subjected to large uncertainties. Smart Mater. Struct. 2015, 24, 045044. [Google Scholar] [CrossRef]
- Elahinia, M.; Ciocanel, C.; Nguten, M.; Wang, S. MR and ER based semiactive engine mounts. Smart Mater. Res. 2013, 21, 831017. [Google Scholar] [CrossRef]
- Wu, W.; Chen, X.; Shan, Y. Analysis and experiment of a vibration isolator using a novel magnetic spring with negative stiffness. J. Sound Vib. 2014, 333, 2958–2970. [Google Scholar] [CrossRef]
- Truong, T.Q.; Ahn, K.K. A new type of semi-active hydraulic engine mount using controllable area of inertia track. J. Sound Vib. 2010, 329, 247–260. [Google Scholar] [CrossRef]
- Kamada, T.; Fujita, T.; Hatayama, T.; Arikabe, T.; Murai, N.; Aizawa, S.; Tohyama, K. Active vibration control of frame structures with smart structures using piezoelectric actuators (vibration control by control of bending moments of columns). Smart Mater. Struct. 1997, 6, 448–456. [Google Scholar] [CrossRef]
- Loukil, T.; Bareille, O.; Ichchou, M.N.; Haddar, M. A low power consumption control scheme: Application to a piezostack-based active mount. Front. Mech. Eng. 2013, 8, 383–389. [Google Scholar] [CrossRef]
- Sui, L.; Shi, X.X.G. Piezoelectric actuator design and application on active vibration control. Phys. Procedia 2012, 25, 1388–1396. [Google Scholar] [CrossRef]
- Choi, S.B.; Choi, Y.T. Sliding mode control of a shear-mode type ER engine mount. KSME Int. J. 1999, 13, 26–33. [Google Scholar] [CrossRef]
- Sarkar, C.; Hirani, H.; Sasane, A. Magneto-rheological Smart Automotive Engine Mount. Int. J. Curr. Eng. Technol. 2015, 5, 419–428. [Google Scholar]
- Chang, Y.; Zhou, J.; Wang, K.; Xu, D. A quasi-zero-stiffness dynamic vibration absorber. J. Sound Vib. 2020, 494, 115859. [Google Scholar] [CrossRef]
- Liette, J.; Dreyer, J.T.; Singh, R. Interaction between two Paths for source mass motion control over mid-frequency range. J. Sound Vib. 2014, 333, 2369–2385. [Google Scholar] [CrossRef]
- Hong, D.; Kim, B. Vibration Reduction for Modulated Excitation Using Lumped Parameter Modeling and Multi-Channel NLMS Algorithm for a Structure with Three Active Paths between Plates. J. Mech. Sci. Technol. 2019, 33, 4673–4680. [Google Scholar] [CrossRef]
- Hong, D.; Kim, B. Quantification of Active Structural Path for Vibration Reduction Control of Plate Structure under Sinusoidal Excitation. Appl. Sci. 2019, 9, 711. [Google Scholar] [CrossRef]
- Qiu, Y.; Hong, D.; Kim, B. Optimal placement criteria of hybrid mounting system for chassis in future mobility based on beam-type continuous smart structures. Sci. Rep. 2023, 13, 2317. [Google Scholar] [CrossRef] [PubMed]
- Hausberg, F.; Scheiblegger, C.; Pfeffer, P.; Plöchl, M.; Hecker, S.; Rupp, M. Experimental and analytical study of secondary path variations in active engine mounts. J. Sound Vib. 2015, 340, 22–38. [Google Scholar] [CrossRef]
- Bartel, T.; Herold, S.; Mayer, D.; Melz, T. Development and Testing of Active Vibration Control Systems with Piezoelectric Actuators. In Proceedings of the 6th ECCOMAS Conference on Smart Structures and Mate-Rials, Torino, Italy, 24–26 June 2013; pp. 24–26. [Google Scholar]
- Li, H.; Goodall, R.M. Linear and nonlinear skyhook damping control laws for active railway suspensions. Control. Eng. Pract. 1999, 7, 843–850. [Google Scholar] [CrossRef]
- Singal, K.; Rajamani, R. Zero-Energy Active Suspension System for Automobiles with Adaptive Skyhook Damping. J. Vib. Acoust. 2013, 135, 011011. [Google Scholar] [CrossRef]
- Emura, J.; Kakizaki, S.; Yamaoka, F.; Nakamura, M. Development of the Semi-Active Suspension System Based on the Skyhook Damper Theory. SAE Trans. J. Passeng. Cars 1994, 103, 1110–1119. [Google Scholar]
- Chai, Y.; Li, F.; Song, Z.; Zhang, C. Analysis and active control of nonlinear vibration of composite lattice sandwich plates. Nonlinear Dyn. 2020, 102, 2179–2203. [Google Scholar] [CrossRef]
- Hong, D.; Moon, H.; Kim, B. Bidirectional active vibration control of two-dimensional structure inspired by automotive engine mounting system. J. Mech. Sci. Technol. 2024, 38, 2231–2246. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Unit |
|---|---|---|
| 1.721 | ||
| 1.350 | ||
| 0.075 | ||
| 33.402 | ||
| 18.070 | ||
| 5.46 | ||
| 0.5 | ||
| 0.61 | ||
| 0.42 | ||
| 22 | ||
| 140 | ||
| 64 | ||
| 200 | ||
| 50.686 | ||
| 179.314 | ||
| 136 | ||
| 0 | ||
| 200 | ||
| 50 |
| ] | Source | Receiver | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | P5_Horiz | |
| Without Control | 0.6002 | 1.0372 | 0.2932 | 0.0817 | 0.2214 | |
| With Control | 0 100% | 0.7291 29.7% | 0.2061 29.7% | 0.0463 43.34% | 0.1685 23.92% | 50.26% |
| ] | Source | Receiver | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | P5_Horiz | |
| Without Control | 0.6002 | 1.0372 | 0.2932 | 0.0817 | 0.2214 | |
| With Control | 0.5724 4.64% | 0.6747 34.95% | 0.1907 34.95% | 0 100% | 0.1729 21.92% | 54.9% |
| ] | Source | Receiver | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | P5_Horiz | |
| Without Control | 0.6002 | 1.0372 | 0.2932 | 0.0817 | 0.2214 | |
| With Control | 1.4142 135.6% | 0 100% | 0 100% | 0.1058 29.57% | 0.0583 73.68% | 95.85% |
| ] | Source | Receiver | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | P5_Horiz | |
| Without Control | 0.6002 | 1.0372 | 0.2932 | 0.0817 | 0.2214 | |
| With Control | 1.7821 196.9% | 0.3184 69.3% | 0.09 69.3% | 0.148 81.1% | 0 100% | 100% |
| ] | Source | Receiver | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | P5_Horiz | |
| Without Control | 0.6286 | 1.0649 | 0.301 | 0.1785 | 0.4747 | |
| With Control | 0.1123 82.14% | 0.7968 25.18% | 0.2252 25.18% | 0.1604 10.1% | 0.3739 21.14% | 40.64% |
| ] | Source | Receiver | |||
|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | |
| Without Control | 1.0103 | 1.7457 | 0.4935 | 0.2459 | 0.7447 |
| With Control | 0.1176 88.36% | 1.2834 26.48% | 0.3628 26.48% | 0.244 0.78% | 0.5854 21.39% |
| ] | Source | Receiver | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | P5_Horiz | |
| Without Control | 0.4125 | 0.6796 | 0.1921 | 0.137 | 0.3239 | |
| With Control | 0.1345 67.38% | 0.5475 19.43% | 0.1548 19.43% | 0.1111 18.92% | 0.2643 18.41% | 25.56% |
| ] | Source | Receiver | |||
|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | |
| Without Control | 0.6227 | 1.0757 | 0.3041 | 0.1539 | 0.4664 |
| With Control | 0.1723 72.33% | 0.8397 21.94% | 0.2374 21.94% | 0.1535 0.27% | 0.3825 18.01% |
| ] | Source | Receiver | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | P5_Horiz | |
| Without Control | 0.6308 | 1.0709 | 0.3027 | 0.1833 | 0.4888 | |
| With Control | 0.2358 62.61% | 0.8537 20.28% | 0.2413 20.28% | 0.1632 10.95% | 0.4025 17.65% | 35.32% |
| ] | Source | Receiver | |||
|---|---|---|---|---|---|
| P1 | P2 | P3 | P4 | P5_Vert | |
| Without Control | 1.0182 | 1.7589 | 0.4972 | 0.2535 | 0.7688 |
| With Control | 0.3663 64.02% | 1.3893 21.02% | 0.3927 21.02% | 0.2536 0.02% | 0.6394 16.82% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, D.; Moon, H.; Kim, B. Feasibility Study on Active Structural Attenuation: Addressing Multiband Vibration in Automotive Vehicles on 2D Asymmetric Structures with a Faulty Horizontal Actuator. Symmetry 2024, 16, 727. https://doi.org/10.3390/sym16060727
Hong D, Moon H, Kim B. Feasibility Study on Active Structural Attenuation: Addressing Multiband Vibration in Automotive Vehicles on 2D Asymmetric Structures with a Faulty Horizontal Actuator. Symmetry. 2024; 16(6):727. https://doi.org/10.3390/sym16060727
Chicago/Turabian StyleHong, Dongwoo, Hojoon Moon, and Byeongil Kim. 2024. "Feasibility Study on Active Structural Attenuation: Addressing Multiband Vibration in Automotive Vehicles on 2D Asymmetric Structures with a Faulty Horizontal Actuator" Symmetry 16, no. 6: 727. https://doi.org/10.3390/sym16060727