Abstract
Picard iteration is on the basis of a great number of numerical methods and applications of mathematics. However, it has been known since the 1950s that this method of fixed-point approximation may not converge in the case of nonexpansive mappings. In this paper, an extension of the concept of nonexpansiveness is presented in the first place. Unlike the classical case, the new maps may be discontinuous, adding an element of generality to the model. Some properties of the set of fixed points of the new maps are studied. Afterwards, two iterative methods of fixed-point approximation are analyzed, in the frameworks of b-metric and Hilbert spaces. In the latter case, it is proved that the symmetrically averaged iterative procedures perform well in the sense of convergence with the least number of operations at each step. As an application, the second part of the article is devoted to the study of fractal mappings on Hilbert spaces defined by means of nonexpansive operators. The paper considers fractal mappings coming from -contractions as well. In particular, the new operators are useful for the definition of an extension of the concept of -fractal function, enlarging its scope to more abstract spaces and procedures. The fractal maps studied here have quasi-symmetry, in the sense that their graphs are composed of transformed copies of itself.
1. Introduction
Mean values methods were investigated by important mathematicians like Cesàro or Fejér for the summation of divergent series (see, for instance, the references [1,2,3]). W.R. Mann proposed in 1953 the use of averaged values for the treatment of nonconvergent iteration processes [4]. The main purpose of their work was the resolution of differential and integral equations modeling several physical problems, by means of the method of successive approximations.
A bit later, Krasnoselskii [5] proved that the Picard iterations of a nonexpansive mapping T defined on certain normed space X may not converge, even if the map has a unique fixed point. However, the sequence defined recursively as:
for and does converge to it. This finding confirmed that averages method is very useful in the cases where the typical map iteration fails to approach a fixed point. Since then, more sophisticated iterative methods based on means have appeared, as that proposed by Ishikawa [6].
The first aim of this article is the presentation of a new concept of nonexpansiveness, presenting maps that include the usual nonexpansive mappings like a particular case. This will be done in the context of b-metric spaces.
Definition 1.
A b-metric space X is a set endowed with a mapping with the following properties:
- 1.
- if and only if .
- 2.
- for any
- 3.
- There exists such that for any
The constant s is the index of the b-metric space, and d is called a b-metric.
Example 1.
is a b-metric with index 2 (see for instance [7]).
Let be the m-dimensional Euclidean space, and , . The map defined as:
Nowadays, a large number of papers are devoted to the study of several types of single and multivalued contractions defined on b-metric spaces. The reader can consult the references [8,9,10,11] as a small and far from representative sample of articles on this topic.
The self-maps to be studied here are given by the following definition.
Definition 2.
Let E be a b-metric space, and be a self-map such that for any :
If and , T is a nonexpansive partial contractivity.
For , we have a nonexpansive mapping.
Section 2 collects some properties of the new operators. In particular, it studies the main characteristics of the set of fixed points, whenever the space of definition owns some specific structure. Section 3 is devoted to the study of the convergence of the Mann iterations (called also Krasnoselskii–Mann iterations) of a nonexpansive partial contractivity, given by the following recursive scheme:
for , (see for instance [4]). When is a constant, the algorithm is usually called Krasnoselskii iteration [5]. We first prove the convergence of the Mann’s method in a b-metric space in the case , where s is the index of the b-metric, whenever the scalars are suitably chosen. Afterwards, the case is considered in the framework of a Hilbert space. The properties of the sequence of iterates are described and the weak convergence to a fixed point is proved for a wide range of values of the sequence .
In particular, it is proved that the symmetrically weighted average:
corresponding to the case where for all converges strongly to a fixed point with asymptotic stability when If the underlying space is Hilbert and , the average (3) converges weakly to a fixed point. In the latter case, this symmetric pattern is optimum in the sense of performing the least number of operations at each step.
Section 4 is similar to Section 3, but the method studied is a three-steps algorithm called SP-iteration [12]. This is given by the following recursion:
for In particular, the convergence of the symmetric averaged iterations, corresponding to the case where is proved. This choice is optimum in the sense of minimum number of operations at each step in the case . Section 5 applies the results obtained to the definition of fractal maps where I is a real compact interval and V is a Hilbert space. The mappings constructed are called in this paper nonattracting fractal maps, due to the fact that they cannot be approached by means of the usual Picard iterations, in general. This topic was initiated in the reference [13] in the context of Banach spaces and algebras. Section 6 is devoted to the definition of fractal mappings valued on Hilbert spaces through -contractions on the Bochner space of square-integrable mappings. The methods of their successive approximations are also considered. Section 7 constructs mappings of -fractal type, but in a wider and more abstract setting. These maps generalize the so called -fractal functions, thoroughly studied in recent mathematical literature (see for instance [13,14,15,16] and references therein). Roughly speaking, a geometric object is symmetric if it is composed of similar pieces. The fractal maps studied here own a quasi-symmetry, in the sense that their graphs are composed of transformed copies of itself, that is to say, if G is the graph of a fractal map, it satisfies the set equation:
where are set-valued operators to be defined later in this text (see for instance Theorem 5 of [13]).
Remark 1.
In this paper, and will be used indistinctly to denote the image of an element f by the map
2. Nonexpansive Partial Contractivities
For a basic introduction to b-metric spaces the reader can consult the references [7,17,18,19], for instance. We extend the definition of partial contractivity presented in the reference [20].
Definition 3.
Let E be a b-metric space, and be a self-map such that for any :
- 1.
- If and , T is a partial contractivity.
- 2.
- If and , T is a nonexpansive partial contractivity.
For we obtain the classical contractive/nonexpansive mappings.
Example 2.
Let be endowed with the usual metric, and be defined as for and for It is an easy exercise to check that T is a nonexpansive partial contractivity, where and
Other examples can be found in [19]. In previous works, we proved that several well known types of contractions are partial contractivities whenever the constants satisfy certain conditions. This is true for Zamfirescu and quasi-contractions in particular.
Definition 4.
Let X be a b-metric space and be a map such that there exist constants with , and for any one of the following conditions is satisfied:
- 1.
- ;
- 2.
- ;
- 3.
Then, T is called a Zamfirescu contraction [21].
Proposition 1.
Let X be a b-metric space and T be a Zamfirescu contraction with constants If and then T is a partial contractivity with constants:
and
Proof.
See reference [20]. □
Remark 2.
For a metric space, the index s is one, and all the Zamfirescu maps are partial contractivities, according to the last result.
Something similar happens with quasi-contractions. Let us begin with the definition.
Definition 5.
For a b-metric space , a self-map is a quasi-contraction if there exists a real constant such that for all :
Proposition 2.
If is a b-metric space and is a quasi-contraction with ratio such that , then T is a partial contractivity with:
and
Proof.
See reference [19]. □
Remark 3.
For a metric space, a quasi-contraction is a partial contractivity whenever according to the last result.
Unlike the classical nonexpansive mappings, a nonexpansive partial contractivity need not be continuous (see for instance Example 2). This fact adds an element of generality to partial contractivities. However, if , then it is Lipschitz continuous.
In the following, we give some properties of the set of fixed points of a nonexpansive partial contractivity.
Proposition 3.
Let E be a b-metric space, and T be a continuous nonexpansive partial contractivity. Then, the set of fixed points is a closed set.
Proof.
It is a consequence of the continuity of T and the definition of fixed point. □
In the case of specific normed spaces, we can add some important properties to the set of fixed points of a nonexpansive partial contractivity, where the continuity of T is not needed. Let us start with a definition.
Definition 6.
Let E be a b-metric space and The map T is quasi-nonexpansive if and ,
Example 3.
Let and defined as: for and where for The only fixed point of T is zero, and T is quasi-nonexpansive and discontinuous in the interval
Example 4.
Let and defined as: where for and T is quasi-nonexpansive and continuous in the interval
Proposition 4.
Let E be a b-metric space and be a nonexpansive partial contractivity. If then T is quasi-nonexpansive and T is continuous on
Proof.
It is a consequence of the definitions of nonexpansive partial contractivity and quasi-nonexpansive maps. □
The next result can be read in the reference [22], Theorem 1.
Theorem 1.
Let E be a strictly convex Banach space, and , such that C is nonempty, closed, and convex. Let be a quasi-nonexpansive self-map. Then, the set is closed and convex.
Corollary 1.
Let E be a strictly convex Banach space, and , such that C is nonempty, closed, and convex. Let be a nonexpansive partial contractivity. If then is a closed and convex set, and T is continuous on it.
Proof.
It is a consequence of Proposition 4 and Theorem 1. □
Corollary 2.
Let E be a strictly convex Banach space, , such that C is nonempty, closed, and convex. Let be a nonexpansive partial contractivity. If then is a singleton or it is infinite. If then
Proof.
The first part is a consequence of Corollary 1. The second statement was proved in Theorem 2.1 of reference [20]. □
Corollary 3.
If , for , satisfies the conditions described previously, and is a nonexpansive partial contractivity such that then is closed and convex.
Proof.
The Lebesgue spaces where are strictly convex, and we have the hypotheses of Corollary 1. □
Let us inquire about the existence of a fixed point with minimal distance to any The next result can be read in [23], for instance.
Theorem 2.
Let E be a reflexive Banach space, if is nonempty, closed, and convex, then F is proximal, that is to say, for any there exists such that . If additionally E is strictly convex then the “best approximation” to g is unique.
Corollary 4.
Let E be a uniformly convex Banach space, , such that C is nonempty, closed, and convex. Let be a nonexpansive partial contractivity. If , then for any there exists a unique such that
Proof.
Uniformly convex Banach spaces are strictly convex. According to Theorem of Milman–Pettis they are reflexive spaces as well (see for instance [24]). By Corollary 1, is closed and convex, and the result is a consequence of Theorem 2. □
In particular, this result holds for nonexpansive partial contractivities defined on Lebesgue spaces with
3. Mann Iterations for Nonexpansive Partial Contractivities
As noticed in the introduction, for a nonexpansive self-map, the Picard iterations may not converge, even if the fixed point exists and is unique [5]. In this case, some other approximation methods may be necessary. In the following, we consider one of the simplest iteration procedures for fixed point approaching, in the context of quasi-normed and normed spaces.
Definition 7.
If E is a real linear space, the mapping is a quasi-norm of index s if:
- 1.
- ; if and only if
- 2.
- .
- 3.
- There exists such that for any
The space is a quasi-normed space. If E is complete with respect to the b-metric induced by the quasi-norm, then E is a quasi-Banach space. Obviously, if , then E is a normed space.
Example 5.
Let be a Lebesgue space with , and let the map be defined as:
is a quasi-Banach space with index
Let E be a quasi-normed space, be nonempty, closed, and convex, and be a nonexpansive partial contractivity. Let us assume that . The Mann iterative scheme [4] is given by:
for , . When for all n we obtain the Picard iteration, as a particular case. If for any n we have the Krasnoselskii [5] iteration:
In the following, we prove that for some values of the Mann iterations associated with a partial contractivity T converge to a fixed point if . In reference [20], it was proved that if the ratio a is lower than one and there exists a fixed point, it is unique.
Let be the sequence of Mann iterates (9) of an element and . Then:
Due to the contractivity condition (7):
and hence:
Repeating the argument for consecutive values of n, we obtain:
Let us assume in the first place that . Let us choose a number k such that for any j. Then:
In order to satisfy the condition:
it is necessary that . Then, let us take such that
We have that:
Consequently, the Mann iterations converge to the fixed point with global asymptotical stability for values satisfying the condition (12) for . Additionally, any ball centered at the fixed point is an invariant set for the Mann iterations (see reference [25]). In the normed case (), it suffices that the sequence be such that
Case
Let us consider now that , that is to say, E is a normed space, and assume that T is a nonexpansive partial contractivity where . We will denote the norm on E with the usual notation Let us consider the following definition about a sequence in E and a self-map T (see for instance the references [26,27]).
Definition 8.
Let E be a normed space, and be such that and a sequence . We say that has:
- 1.
- The limit existence property (LE property for short) if exists and is finite for any
- 2.
- The approximate fixed point property (AF for short) if
Proposition 5.
Let E be a normed space, nonempty, closed, and convex, and be a nonexpansive partial contractivity such that For any , the Mann iteration has the LE property for any choice of the scalars
Proof.
If is the sequence of Mann iterates for any , according to (11) for :
The sequence of real numbers is decreasing and bounded, and consequently, it is convergent for any Hence, the sequence has the LE property. □
Let use see that choosing the scalars suitably, the Mann iteration has the AF property as well. For it, we need a previous Lemma, that can be read in the reference [28].
Lemma 1.
Let E be a uniformly convex Banach space, and a sequence be such that there exist satisfying the condition for all Let , be sequences of E such that , , and for some Then,
Proposition 6.
Let E be a uniformly convex Banach space, nonempty, closed, and convex, and a nonexpansive partial contractivity such that If the scalars are chosen such that , the Mann iteration has the AF property for any .
Proof.
For , let be the Mann iteration with scalars chosen as described in the statement of this proposition. Let by Proposition 5 The definition of nonexpansive partial contractivity (7) implies that:
and
Moreover:
According to the previous lemma, and has the AF property. □
For the next definition the reader can consult the reference [29].
Definition 9.
A normed space E satisfies the Opial’s condition if for any sequence such that converges weakly to :
for any
Proposition 7.
Let E be a Hilbert space, be nonempty, closed, and convex, and be a nonexpansive partial contractivity. If a sequence converges weakly to and it satisfies the AF property with respect to T, then
Proof.
Let be a sequence satisfying the condition AF (Definition 8), and f be the weak limit of . Since E is a Hilbert space, it satisfies the Opial condition (see for instance Lemma 1 of reference [29]). If :
The AF property implies that Applying the contractivity condition in the second sunmmand, we have:
This is a contradiction, and consequently, □
Theorem 3.
Let E be a Hilbert space, be nonempty, closed, bounded, and convex, and be a nonexpansive partial contractivity such that . Then, the Mann iterates such that converge weakly to a fixed point of T for any .
If additionally converges to or is a cluster point of then converges strongly to
Proof.
According to Propositions 5 and 6, the Mann iterates satisfy the LE and AF properties. Since C is nonempty, closed, bounded, and convex in a Hilbert space, then it is weakly compact [30]. For , let us consider the Mann iterates with scalars satisfying the condition described, Since C is weakly compact, there exists a weakly convergent subsequence This subsequence satisfies the LE and AF properties as well. Let be the weak limit of Since C is weakly closed,
Arguing as in the previous proposition for the sequence
If there exists another subsequence converging weakly to and , using similar arguments we have that Using Opial and LE conditions:
and
This is a contradiction, consequently, and converges weakly to If converges to , let us consider that:
The last quantity converges to:
and consequently,
If is a cluster point of , due to the LE property, the convergence is also strong. □
Corollary 5.
With the hypotheses of the previous theorem, if is the sequence of Mann iterates and is its weak limit, then:
for any
If E is the real Lebesgue space where I is a compact interval:
for any and, in particular:
This fact makes the Mann method suitable to approximate the integral of a fixed point mapping in .
Remark 4.
The results given in this section are true in particular for Krasnoselskii iteration (10) whenever
Remark 5.
The reader may note that the Picard iteration (particular case of Mann iteration when for all n) does not lie in the range of convergence given in Theorem 3. The choice for all n is optimum in the sense of performing the least number of operations at each step.
Corollary 6.
Let E be a Hilbert space, and where C is nonempty, bounded, closed, and convex, be a nonexpansive mapping. Then, and the Mann iterates such that converge weakly to a fixed point of T for any .
Proof.
A nonexpansive mapping is a nonexpansive partial contractivity with With the conditions given on E, C, and T, Browder’s Theorem implies that (see reference [31]). Applying Theorem 3 we obtain the weak convergence of the Mann iterates to a fixed point of T. □
4. SP-Algorithm for Nonexpansive Partial Contractivities
We study now the SP-algorithm (see, for instance, [12]) for nonexpansive partial contractivities. This is a three-step iterative procedure given for by:
for
For for all we have the Karakaya algorithm (see, for instance, [20,32]). In reference [19], we studied the convergence of this method for a quasi-normed space with index s under the hypothesis We obtained that, if , for values of the scalars such that:
where the SP-iterates satisfy the following inequality:
where k is a constant such that Thus, the algorithm is convergent and the order is
Case
In the next theorem, we consider in the case
Theorem 4.
Let E be a uniformly convex Banach space, nonempty, closed, and convex, and be a nonexpansive partial contractivity such that The SP-algorithm has the LE and AF properties whenever the scalars are chosen such that:
Proof.
By (33) of [19], the SP-iterates of any satisfy the inequality:
Then, the sequence is decreasing and bounded and consequently convergent. Thus, the SP-iterates of a nonexpansive partial contractivity have the LE property (see Definition 8). Let us define:
Additionally, for the definition of nonexpansive partial contractivity:
and consequently:
Applying the expression (32) of reference [19]:
Consequently:
Moreover:
Lemma 1 implies that the sequence has the AF property:
Consequently, has the LE property. Let us check now the properties of the sequence :
Using the definitions of nonexpansive partial contractivity, and the expression (31) of reference [19]:
and thus:
By (28):
Thus, we have proved that the SP-iterates have the LE and AF properties for any . □
As a consequence, we have the following results.
Theorem 5.
Let E be a Hilbert space, and where C is nonempty, closed, bounded, and convex, be a nonexpansive partial contractivity such that . Then, the SP-algorithm with converges weakly to a fixed point of T for any .
Corollary 7.
Let E be a Hilbert space, and where C is nonempty, bounded, closed, and convex, be a nonexpansive mapping. Then, and the SP-algorithm with converges weakly to a fixed point of T for any .
The proofs are similar to the given for the Mann iteration. If additionally is a cluster point of or converges to , then converges strongly to for the reasons given in Theorem 3.
Corollary 5 is true for SP-iterations as well. The choice for all n is optimum in the sense of performing the least number of operations at each step.
5. Nonattracting Fractal Mappings on a Hilbert Space
In this section, we define fractal maps through an operator on the Hilbert space of square-integrable Hilbert-valued maps , where and V is a real Hilbert space, associated with an Iterated Function System. is endowed with an inner product defined for as:
and norm:
where is the norm associated with the inner product in V. is a Hilbert space. It agrees with the Lebesgue space when
Since the operator to be defined is nonexpansive, the fractal mappings cannot be approached, in general, by the Picard iterations of the operator, and in this sense we call them nonattracting fractal functions.
Let us consider a natural number and a partition of the interval , Let us define subintervals for and Consider affine maps satisfying the so-called join-up conditions:
Let , where V is a Hilbert space with associated norm , be defined as:
where and . Let us assume that:
for , and Let us assume that are Bochner square-integrable maps. Let us assume that are uniformly nonexpansive in the second variable, that is to say:
for any and The mappings for compose an iterated function system whose attractor is the graph of an integrable map (see for instance [13]).
Let be nonempty, closed, and convex and let us define as:
for The conditions given on imply that , where is the closed unit ball (see reference [13] for details). The operator T is nonexpansive, due to condition (36).
The next result, due to F.E. Browder in an article of 1965, gives sufficient conditions for the existence of fixed points of nonexpansive mappings on subsets of Hilbert spaces [31].
Theorem 6.
Let C be a nonempty closed bounded convex subset of a Hilbert space H, and be a nonexpansive map, then T has a fixed point in C.
According to this result, the operator T defined by the expression (37) satisfies the conditions of Browder’s Theorem and it has some fixed point The graph of has a fractal structure (see Theorem 5 of the reference [13]). The map need not be unique, and the Picard iterations of T may fail to converge to it, and in this sense, we call a nonattracting Hilbert-valued fractal mapping.
The results obtained in the second section provide the following theorems, which collect several properties of the set of fixed points of T and the convergence of the iterations studied.
Theorem 7.
Let and , defined as in (37). Let be the set on nonattracting fractal maps associated with T. Then:
- 1.
- is nonempty, closed, and convex.
- 2.
- is either a singleton or is infinite.
- 3.
- For any , there exists a unique with minimal distance to G, that is to say,
- 4.
- If a sequence converges weakly to and it satisfies the AF property, then that is to say, F is a nonattracting fractal function associated with T.
Theorem 8.
Let and , defined as in (37).
- 1.
- The Mann iterates chosen such that converge weakly to a nonattracting fractal function for any . If additionally, converges to either is a cluster point of the convergence is strong.
- 2.
- If is the quoted Mann iterates and is its weak limit, then:for any
- 3.
- For , that is to say, E is the real Lebesgue space then:and in particular:
- 4.
- Krasnoselskii iterations with satisty the properties (1)–(3).
- 5.
- SP-iterations with scalars such that satisfy the properties (1)–(3).
6. Fractal Mappings Defined through -Contractions
In this section, we consider fractal functions defined by an operator T satisfying an inequality of -contractive type. That is to say:
where satisfies certain conditions, and . In reference [19], a partial contractivity was defined in a b-metric space X, through the inequality:
for any whenever and meet specific conditions. A mapping T fulfilling (38) is a partial contractivity for
There is a great number of results about the existence of fixed points of mappings satisfying (38). We recall important results from Matkowski [33] and Boyd and Wong [34] as a couple of examples. The next theorem can be read in reference [33].
Theorem 9.
Let be a complete metric space, and satisfying:
for any where is nondecreasing and such that for any . Then, T has a unique fixed point and the Picard iterations of any point converge to it.
Remark 6.
The order of convergence of the Picard iterations is obviously .
Definition 10.
A self-map T satisfying the conditions given in Theorem 9 is a φ-contraction, and φ is a comparison function.
Example 6.
The map for is a comparison function.
Proposition 8.
If T is a φ-contraction on a complete metric space, then T is nonexpansive, and consequently, it is quasi-nonexpansive and Lipschitz continuous.
Proof.
The conditions imposed to a comparison function imply that for any By Matkowski’s Theorem, T has a fixed point Then, for any :
and T is quasi-nonexpansive. For all :
and consequently, T is nonexpansive and Lipschitz continuous. □
Definition 11.
A comparison function φ that satisfies the condition when δ tends to infinity is called a strict comparison function, and T is a strict φ-contraction.
For a strict comparison function we have a different way to evaluate the order of convergence of the Picard iterations of a -contraction. This result is due to Russ in the reference [35].
Theorem 10.
If T is a strict φ-contraction and is its fixed point then, for any :
where
We recall another important result of fixed point existence due to Boyd and Wong [34]. Let us denote, for a metric the range of d as P, that is to say: and let be its closure.
Theorem 11.
Let be a complete metric space, and satisfying:
for any where is upper semicontinuous from the right and such that for any . Then, T has a unique fixed point and the Picard iterations of any point converge to it.
Turning to the fractal mappings, we consider now the interval, partition, and maps as in Section 5, and where is such that the operator defined as is a -contraction for that is to say:
for any Then, the operator defined by for is also a -contraction since:
and thus:
since due to conditions (33). Consequently, T is a -contraction, it has a unique fixed point and the Picard iterations are convergent (Theorem 9).
As said previously, the conditions given for the function imply that for and consequently, T is nonexpansive and continuous (Proposition 8). The results given in Section 5 are applicable to it. In this case we have a result of strong convergence for Krasnoselskii algorithm specific for Hilbert spaces.
Theorem 12.
Let us assume that the comparison function φ is such that for any and . Then, the Krasnoselskii iterations of the operator T are strongly convergent to the fixed point for with order of convergence where:
Proof.
Let us consider the Krasnoselskii operator:
for Then, for any
Applying the Cauchy–Schwartz inequality in the second summand, and the conditions on T and :
It is an easy exercise to prove that:
Consequently, is a Banach contraction with ratio k, and its iterations are convergent. □
7. Mappings of -Fractal Type
Let us consider the maps defined as in Section 5 and Given two mappings , we now define as:
for Let us assume that are as in the previous section, that is to say, the operators defined as are contractions on :
where is a comparison function. As seen before, T is a -contraction as well. This iterated function system defines a map as the unique fixed point of the operator In previous papers, has been called the fractal convolution of F and when are linear contractions, and denoted as (see for instance [13]).
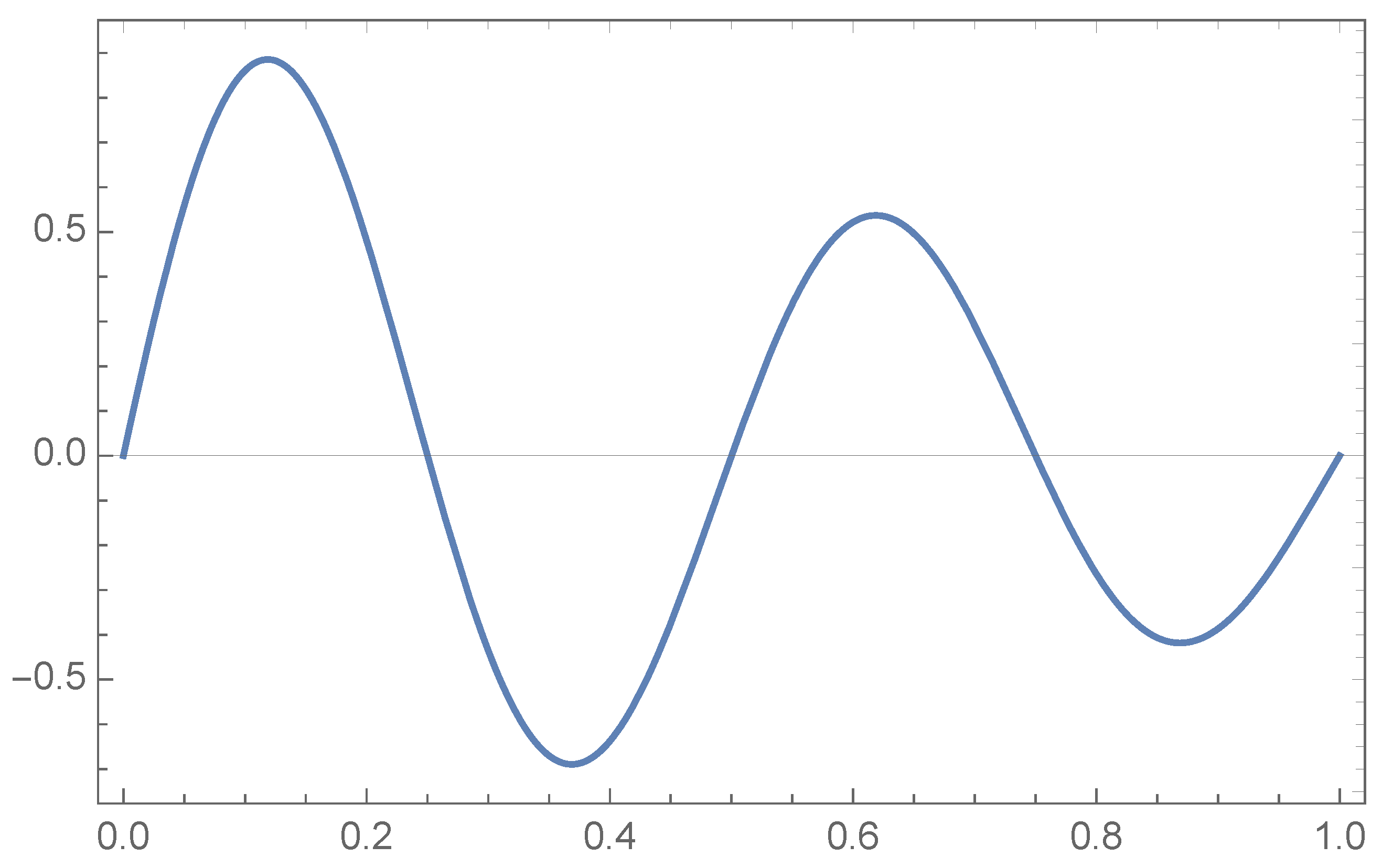
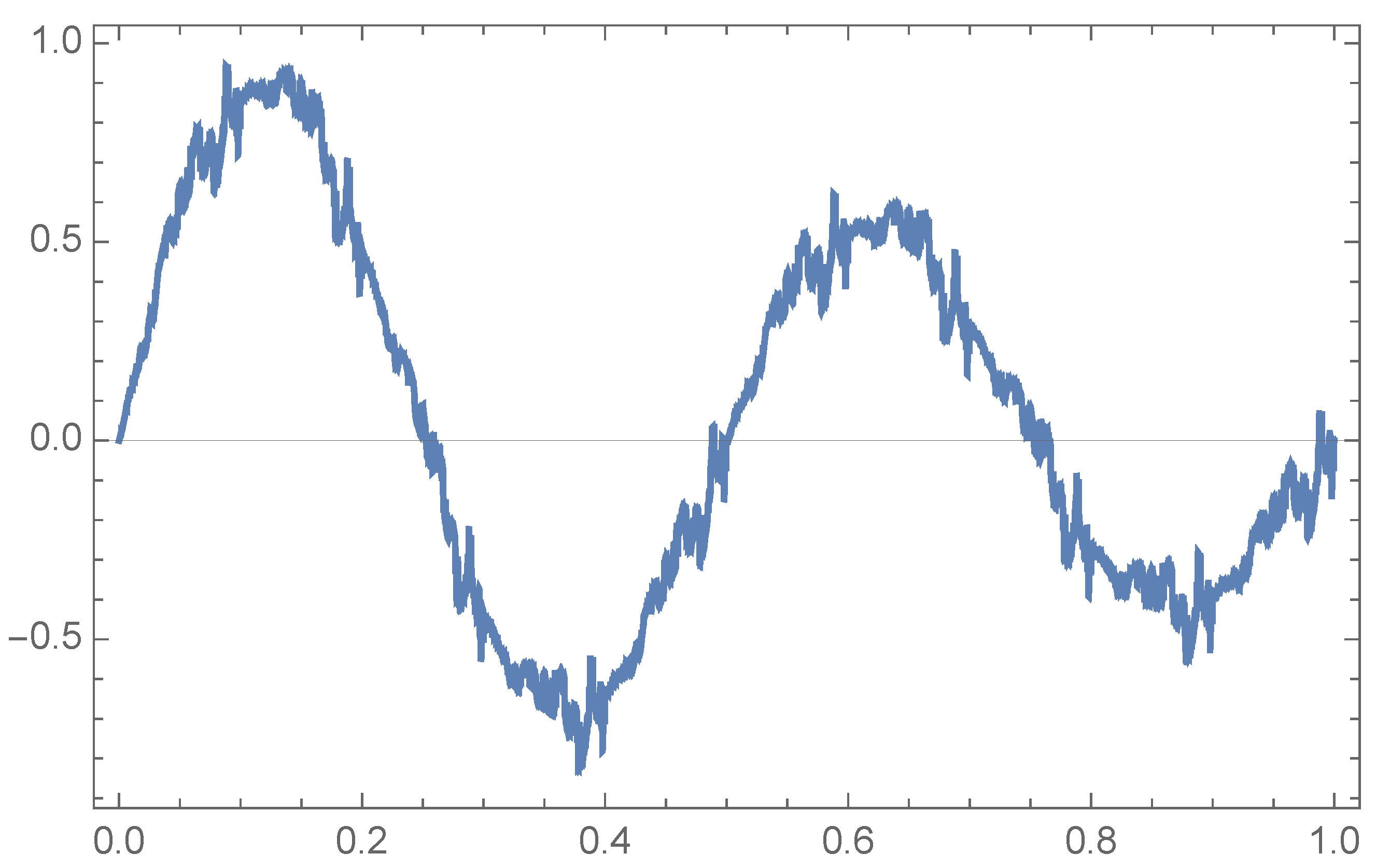
Figure 1 and Figure 2 illustrate the action of the system on the real function in the interval . In this example, the number of evenly sampled subintervals is and

Figure 1.
Graph of the function in the interval .
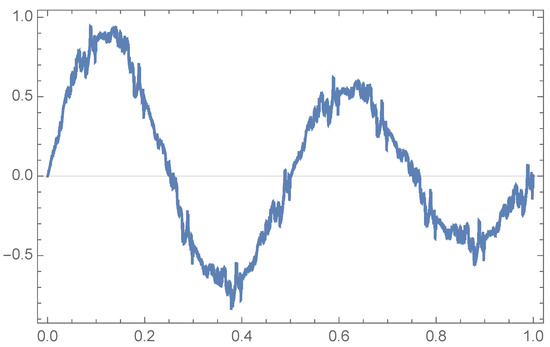
Figure 2.
Graph of the fractal version of the function in .
For a linear contraction (where is a real function such that ), is a -contraction for , and assuming that A exists. For this kind of fractal maps, it is easy to establish the distance between F and its fractal counterpart, usually denoted as We have (see for instance [13,14]):
However, in the general case, this bound is not that easy. We will approach this problem with the help of approximate operators. We begin with a definition.
Definition 12.
Let be given a metric space , two self-maps are approximate operators if there exists such that for any
The bound k determines the distance between the fixed points of T and U, according to the next result, which can be read in the reference [30], Theorems 7.5 and 7.6.
Theorem 13.
Let be given a metric space , and two approximate operators be such that for any
If T is a strict φ-contraction whose fixed point if and , then:
where
If T is a φ-contraction, where φ is subadditive and for any then:
where
Let us consider the operator of fractal interpolation, for the maps described at the beginning of this section. Then:
for Let us define for all Then, T and U are approximate operators in the case where since, arguing as in Section 6:
Let be the fixed point of T. According to Theorem 13:
- If T is a strict -contraction, then:
- If T is a -contraction, where is subadditive and for any then:
If is unbounded, but where C is bounded and closed, we can consider where
A different approach for real continuous functions can be read in the reference [14].
8. Conclusions
The first aim of this article was the presentation of a new type of nonexpansiveness, which includes the usual nonexpansive mappings like a particular case. The new self-maps so defined have been called nonexpansive partial contractivities. Some poperties of the set of their fixed points have been studied. For instance, is convex and closed if the space E is a strictly convex Banach space. Consequently, the set of fixed point is empty, a singleton, or infinite. If additionally E is uniformly convex, then is a Chebyshev set, that is to say, for every element of the space, there is a fixed point of minimal distance.
Afterwards, two iterative procedures for the approximation of fixed points in the context of normed spaces have been studied: Mann and SP-algorithms. For every method, two different cases have been considered. The fist one concerns quasi-normed spaces, and a ratio a of the self-map linked to the partial contractivity. It has been proved that if where s is the index of the quasi-norm, and the scalars are suitably chosen, the algorithms converge strongly to a fixed point, with asymptotic statiblity. In a second instance, the nonexpansive case has been studied (). It has been proved that the sequence of iterates satisfy the LE and AF properties, whenever the space E is a uniformly convex Banach space, and the scalars associated with the algorithms take intermediate values. If E is a Hilbert space, the algorithms converge weakly to a fixed point. In particular, it is proved that the symmetrically averaged iterative procedures perform well in the sense of convergence with the least number of operations at each step, in the case where and E is Hilbert.
These findings have been used for the definition of fractal mappings of type , where I is a real compact interval and V is a Hilbert space. These maps are fixed points of a nonexpansive operator defined on the space of square-integrable Bochner mappings, which contain the space as a particular case (for ). In this text, they are called nonattracting fractal mappings, in the sense that they cannot be approximated by the typical Picard iterations of the operator in general.
In a very different approach, other fractal mappings on Hilbert spaces have been defined through -contractions. Apart of their existence, the strong convergence of the Picard and Krasnoselskii iterations has been proved.
Finally, mappings of -fractal type have been considered, in a framework much more general than the usual real case. The maps here defined are not linked to a scale factor, and they are defined by means of -contractions. The new maps are fractal perturbations of mappings where I is a real compact interval and V is a Hilbert space. The distance between and F has been bounded with the use of approximate operators. The fractal maps studied here own a quasi-symmetry, in the sense that their graphs are composed of transformed copies of itself.
Funding
This work has not received external funds.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Fejér, L. Sur les fonctions bornées et intégrables. Comptes Rendus Acad. Sci. 1900, 131, 984–987. [Google Scholar]
- Kahane, J.P. Leopold Fejér et l’analyse mathématique au début du XXe siècle. Cah. SéMinaire D’Histoire Des MathéMatiques 1981, 2, 67–84. [Google Scholar]
- De la Vallée Poussin, C.J. Leçons sur l’Approximation des Fonctions d’une Variable Réelle; Gauthier-Villars: Paris, France, 1919. [Google Scholar]
- Mann, W.R. Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 44, 506–510. [Google Scholar] [CrossRef]
- Krasnoselskij, M.A. Two remarks on the method of successive approximations (Russian). Uspehi Mat. Nauk. 1955, 10, 123–127. [Google Scholar]
- Ishikawa, S. Fixed points by a new iteration method. Proc. Am. Math. Soc. 1974, 44, 147–150. [Google Scholar] [CrossRef]
- Rano, G.; Bag, T. Quasi-metric space and fixed point theorems. Int. J. Math. Sci. Comp. 2013, 3, 27–31. [Google Scholar]
- Dung, N.V.; Sintunavarat, W. Fixed point theory in b-metric spaces. In Metric Structures and Fixed Point Theory; Chapman and Hall/CRC: London, UK, 2021; pp. 33–66. [Google Scholar]
- Aydi, H.; Bota, M.F.; Karapinar, E.; Mitrovic, S. A fixed point theorem for set valued quasi-contractions in b-metric spaces. Fixed Point Theory Appl. 2012, 2012, 88. [Google Scholar] [CrossRef]
- Khan, A.A.; Ali, B. Completeness of b-metric spaces and best proximity points of nonself quasi-contractions. Symmetry 2021, 13, 2206. [Google Scholar] [CrossRef]
- Alolaiyan, H.; Ali, B.; Abbas, M. Characterization of a b-metric space completeness via the existence of a fixed point of Ciric-Suzuki type quasi-contractive multivalued operators and applications. An. St. Univ. Ovidius Constanta 2019, 27, 5–33. [Google Scholar] [CrossRef]
- Pheungrattana, W.; Suantai, S. On the rate of convergence of Mann, Ishikawa, Noor and SP iterations for continuous functions on an arbitrary interval. J. Comput. Appl. Math. 2011, 235, 3006–3014. [Google Scholar] [CrossRef]
- Navascués, M.A. Fractal curves in Banach algebras. Fractal Fract. 2022, 6, 722. [Google Scholar] [CrossRef]
- Navascués, M.A.; Pacurar, C. Scale-free fractal interpolation. Fractal Fract. 2022, 6, 602. [Google Scholar] [CrossRef]
- Viswanathan, P.E.; Navascués, M.A. A fractal operator on some standard spaces of functions. Proc. Edinburgh Math. Soc. 2017, 60, 771–786. [Google Scholar] [CrossRef]
- Navascués, M.A.; Verma, S. Non-stationary α-fractal surfaces. Mediterr. J. Math. 2023, 20, 48. [Google Scholar] [CrossRef]
- Cobzas, S.; Czerwik, S. The completion of generalized b-metric spaces and fixed points. Fixed Point Theory 2020, 21, 133–150. [Google Scholar] [CrossRef]
- Kirk, W.; Shahzad, N. Fixed Point Theory in Distance Spaces; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Navascués, M.A.; Mohapatra, R.N. Fixed point dynamics in a new type of contraction in b-metric spaces. Symmetry 2024, 16, 506. [Google Scholar] [CrossRef]
- Navascués, M.A. Approximation of fixed points and fractal functions by means of different iterative algorithms. Chaos Solitons Fractals 2024, 180, 114535. [Google Scholar] [CrossRef]
- Zamfirescu, T. Fixed point theorems in metric spaces. Arch. Math. 1972, 23, 292–298. [Google Scholar] [CrossRef]
- Dotson, W.G. Fixed points of quasi-nonexpansive mappings. J. Aust. Math. Soc. 1972, 13, 167–170. [Google Scholar] [CrossRef]
- Li, J. The metric projection and its applications to solving variational inequalities in Banach spaces. Fixed Point Theory 2004, 5, 285–298. [Google Scholar] [CrossRef]
- Pettis, B.J. A proof that every uniformly convex space is reflexive. Duke Math. J. 1939, 5, 249–253. [Google Scholar] [CrossRef]
- Mohapatra, R.N.; Navascués, M.A.; Jha, S.; Chand, A.K.B. Iteration of operators with mutual relations of Kannan type. Mathematics 2022, 10, 2632. [Google Scholar] [CrossRef]
- Agarwal, R.P.; O’Regan, D.; Sahu, D.R. Fixed Point Theory for Lipschitzian-Type Mappings with Applications; Springer: New York, NY, USA, 2009. [Google Scholar]
- Sahu, D.R. Applications of the S-iteration process to constrained minimization problems and split feasibility problems. Fixed Point Theory 2011, 12, 187–204. [Google Scholar]
- Schu, J. Weak and strong convergence of fixed points of asymptotically nonexpansive mappings. Bull. Aust. Math. Soc. 1991, 43, 153–159. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence theorems for nonexpansive mappings. Bull. AMS 1967, 73, 591–597. [Google Scholar] [CrossRef]
- Berinde, V. Iterative Approximation of Fixed Points. Lecture Notes in Mathematics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Browder, F.E. Fixed-points theorems for non-compact mappings in Hilbert spaces. Proc. Natl. Acad. Sci. USA 1965, 53, 1272–1276. [Google Scholar] [CrossRef] [PubMed]
- Karakaya, V.; Atalan, Y.; Dogan, K.; Bouzara, N.E.H. Some fixed point results for a new three steps iteration process in Banach spaces. Fixed Point Theory Appl. 2017, 18, 625–640. [Google Scholar] [CrossRef]
- Matkowski, J. Integrable solutions of functional equations. Diss. Math. 1975, 127, 68. [Google Scholar]
- Boyd, D.W.; Wong, J.S. On nonlinear contractions. Proc. Am. Math. Soc. 1969, 20, 458–464. [Google Scholar] [CrossRef]
- Russ, I.A. Generalized Contractions. Semin. Fixed Point Theory 1983, 3, 1–130. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).