
Study on Fault Diagnosis of Single-Group Springs of Mining Vibrating Screen

Abstract
:1. Introduction
2. Rigid Body Dynamic Model of Mining Vibrating Screen
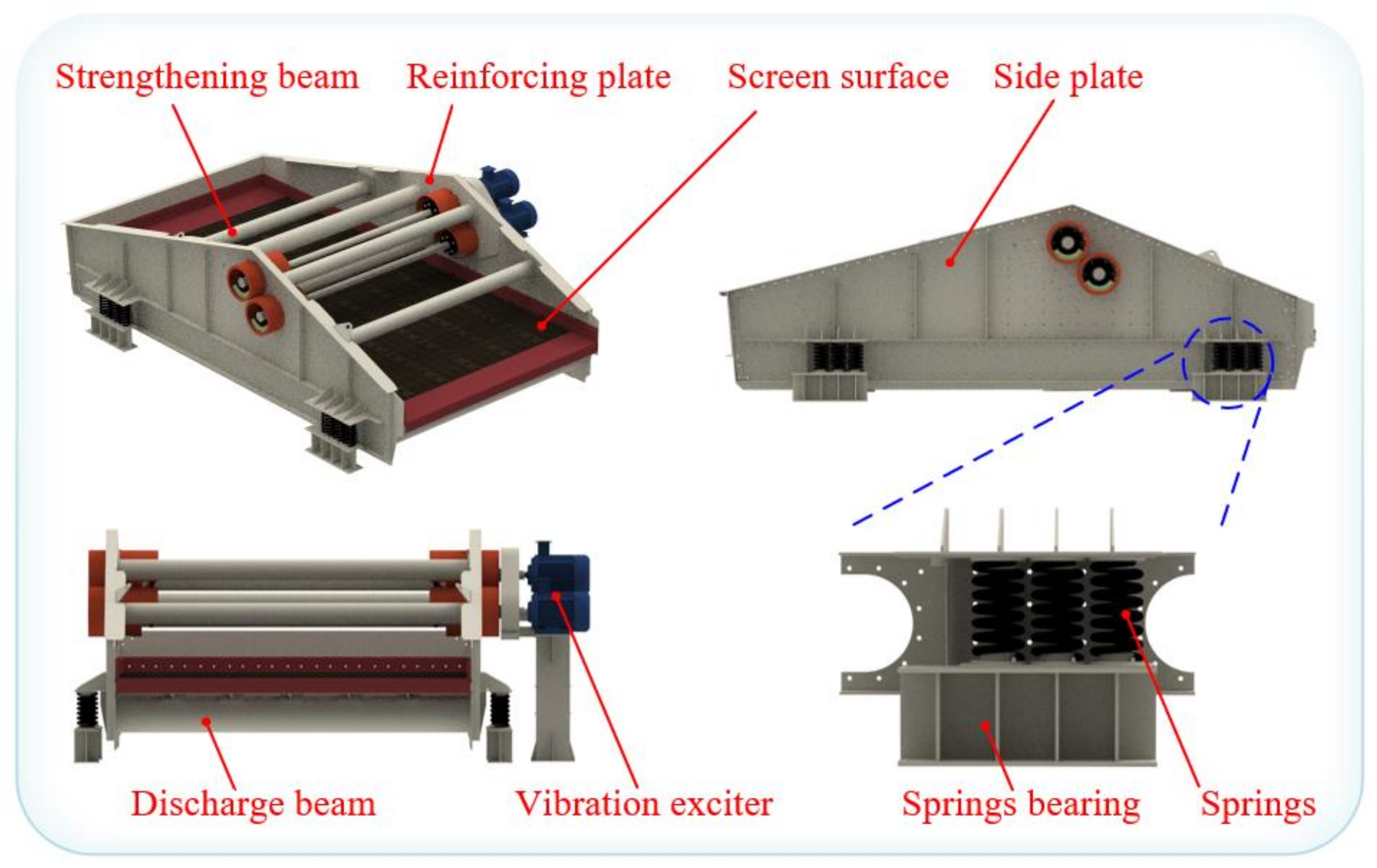
2.1. Mining Vibrating Screen Description
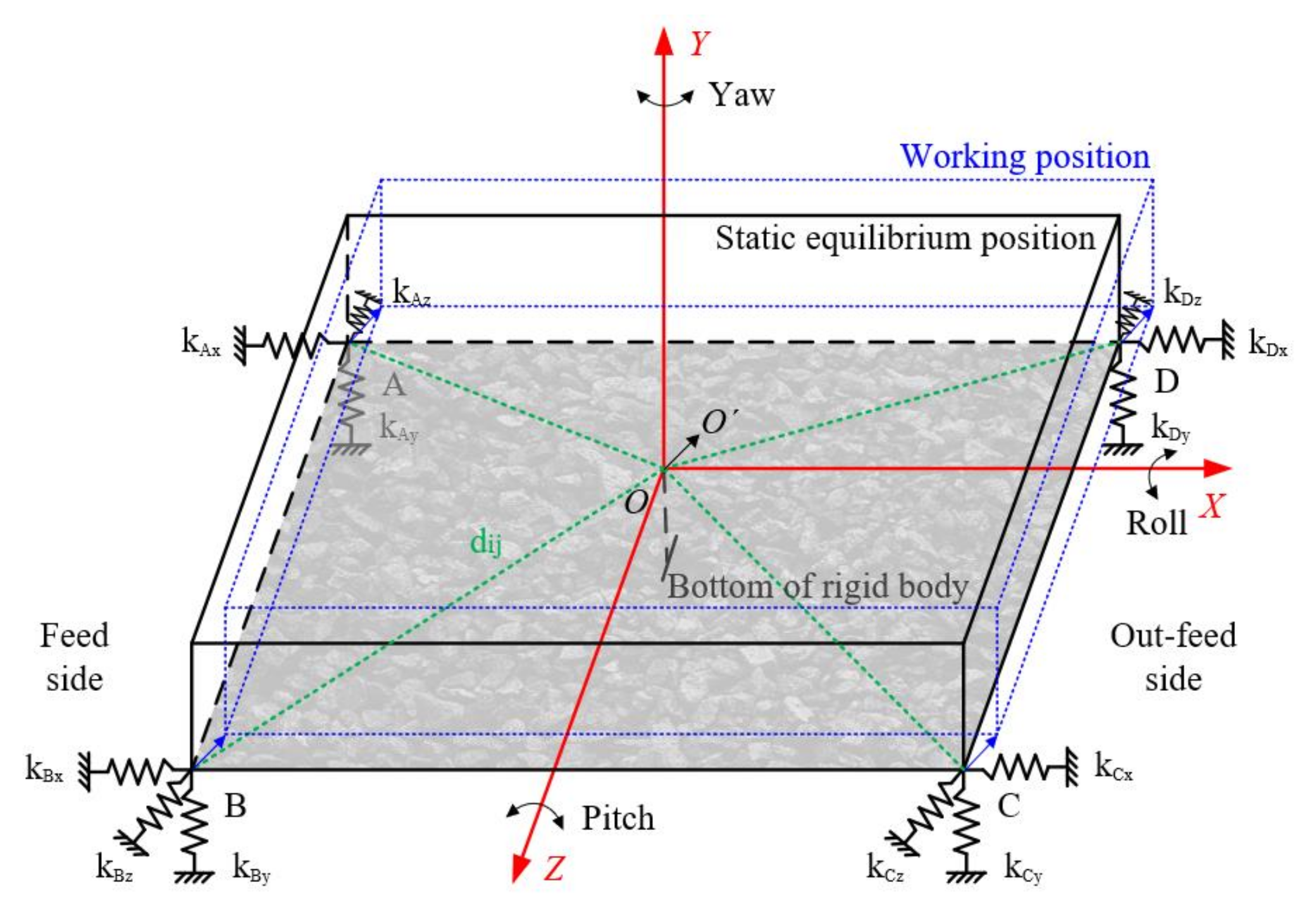
2.2. Simplified Model
3. Numerical Analysis
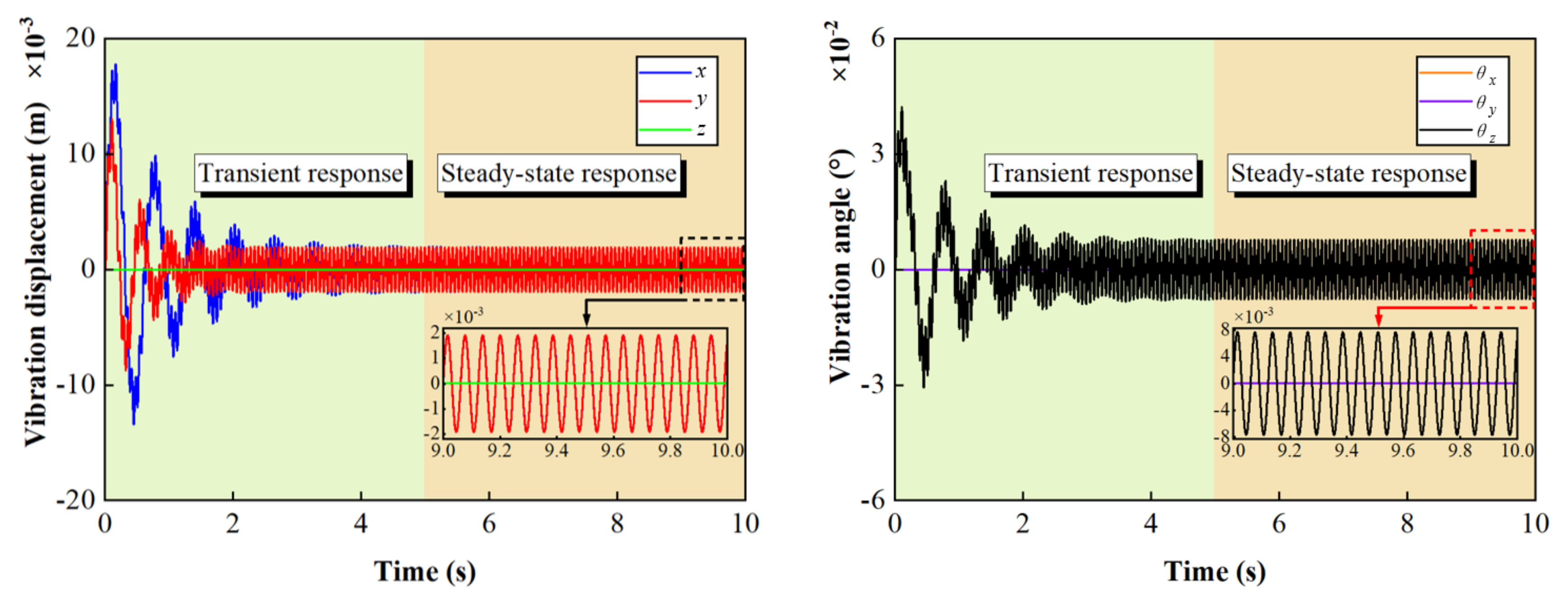
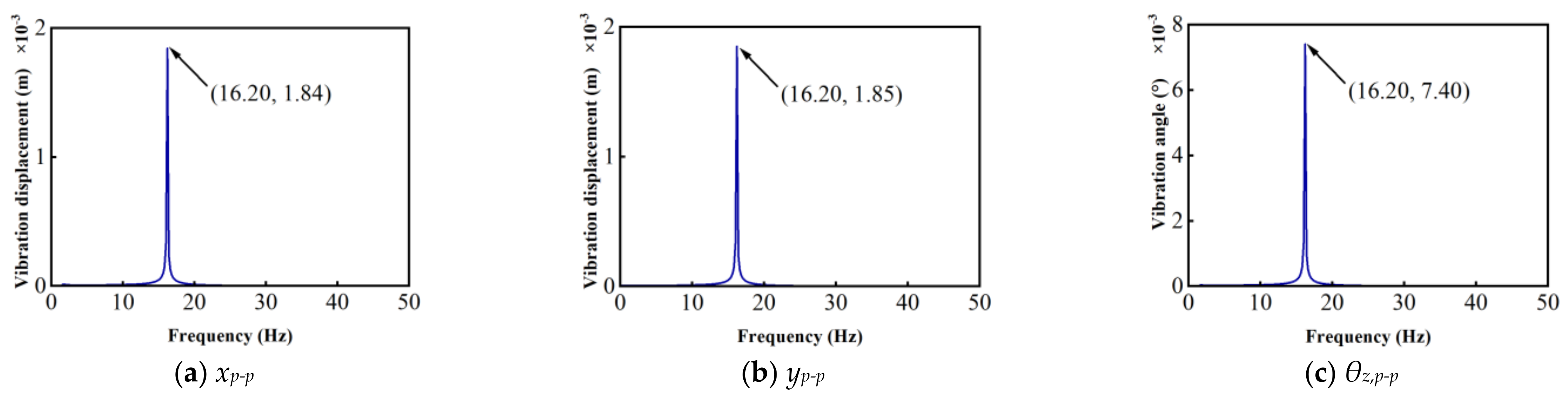
3.1. Numerical Results
3.2. Simulation Verification
4. Fault Diagnosis Method of Single-Group Springs
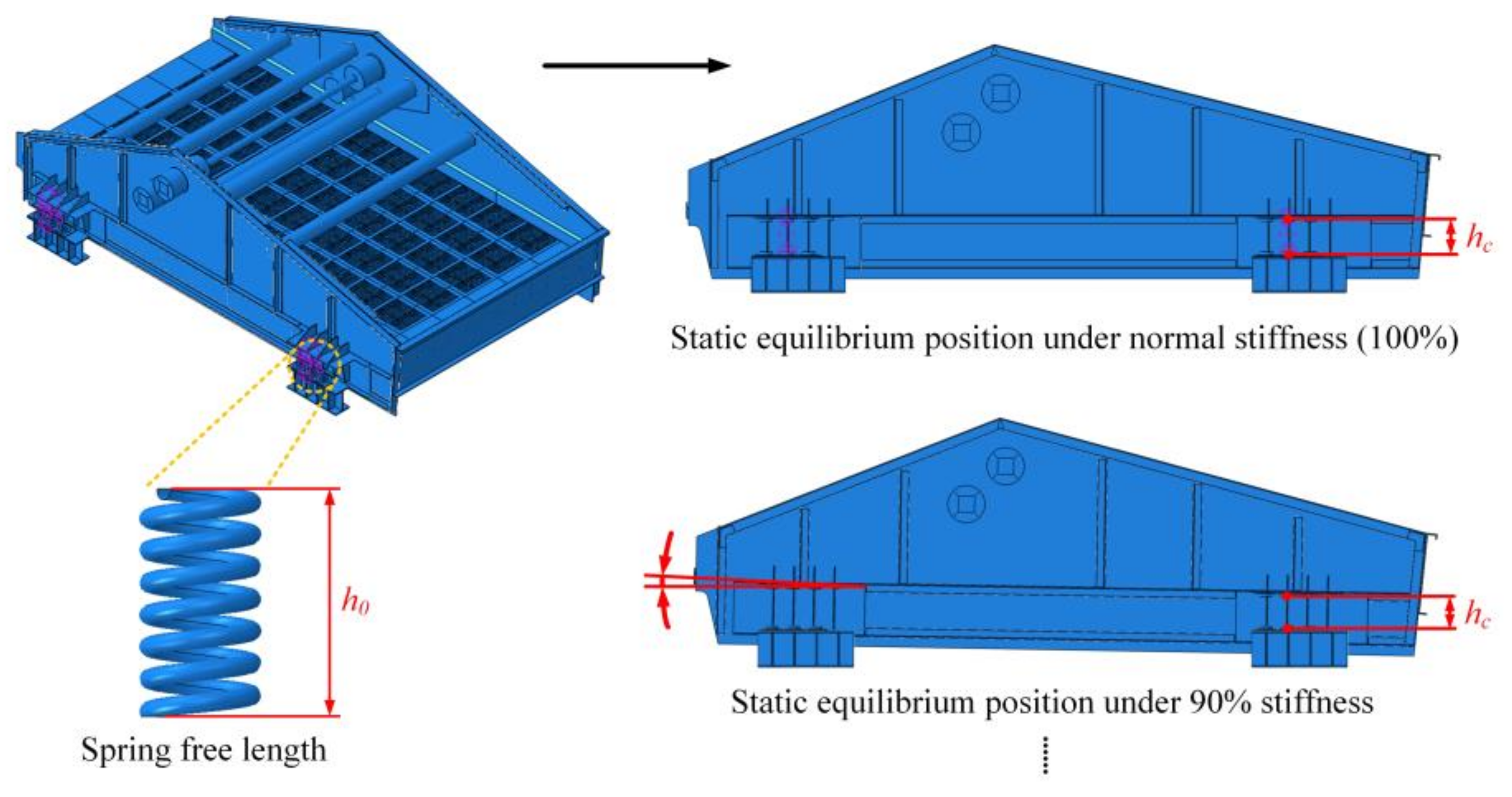
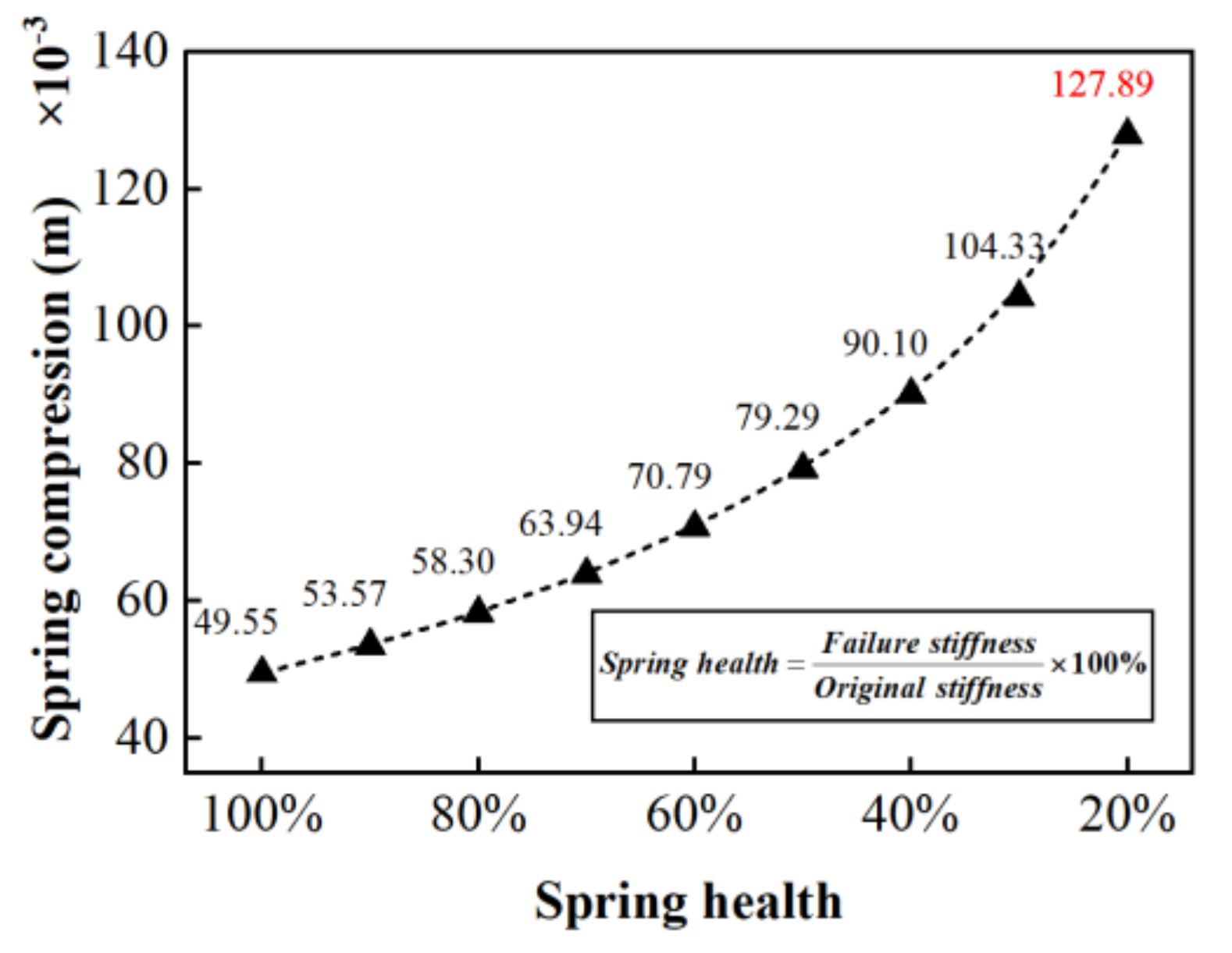
4.1. Limit of Health of Faulty Single-Group Springs
4.2. Fault Diagnosis
5. Fault Diagnosis Validation
6. Conclusions
- (1)
- The simplified model is established to analyze the vibration of the mining vibrating screen and is verified using ABAQUS simulations. The errors are all maintained within 1%, confirming the effectiveness of the simplified model.
- (2)
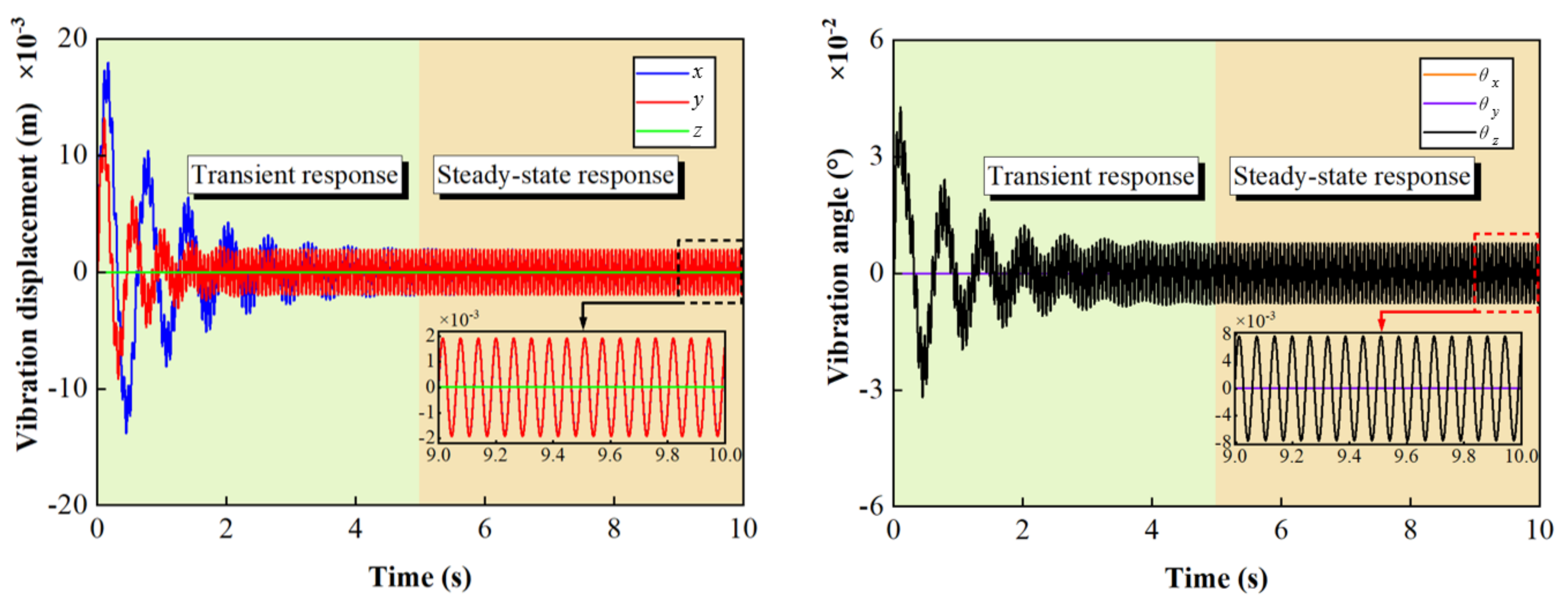
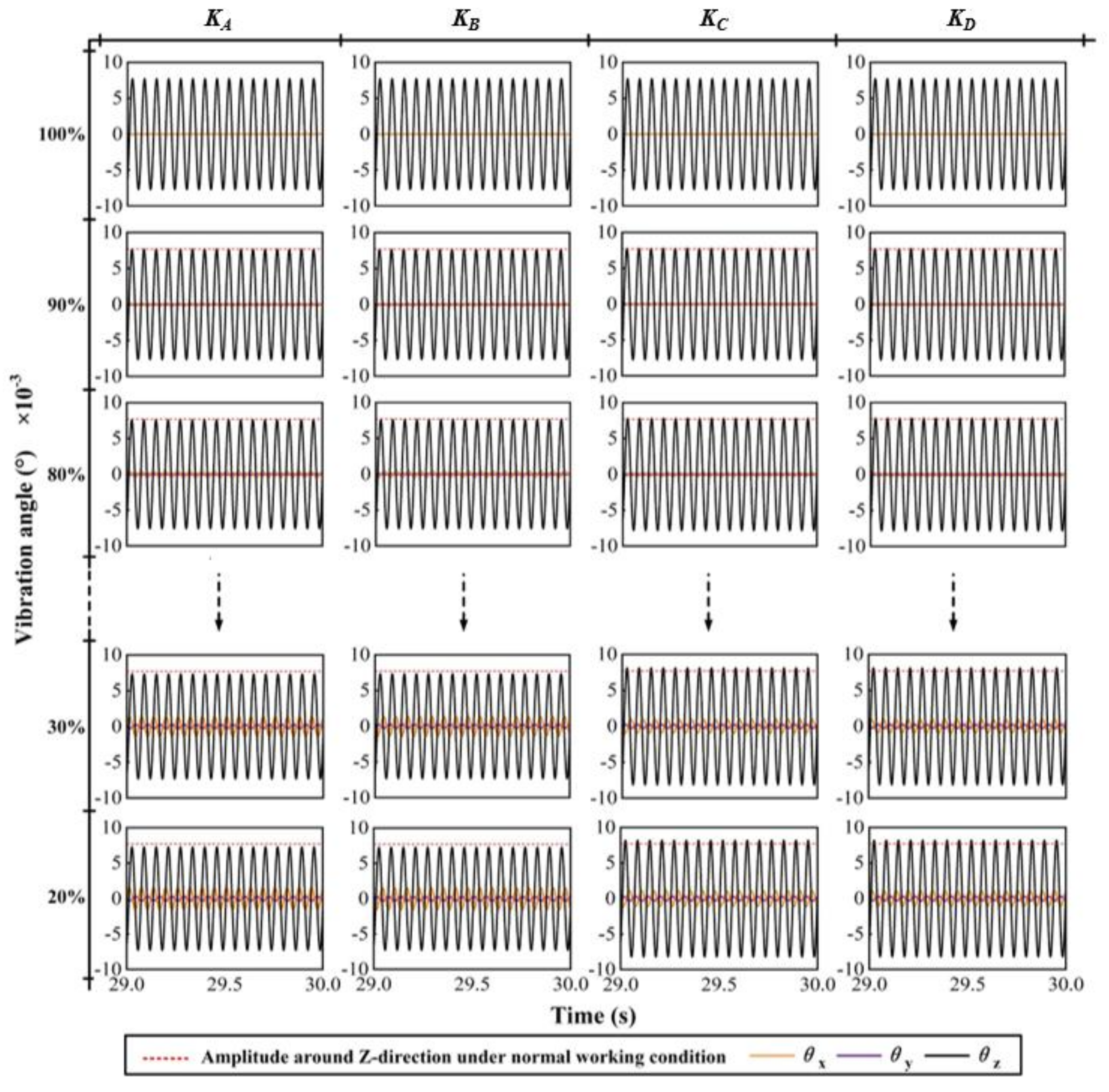
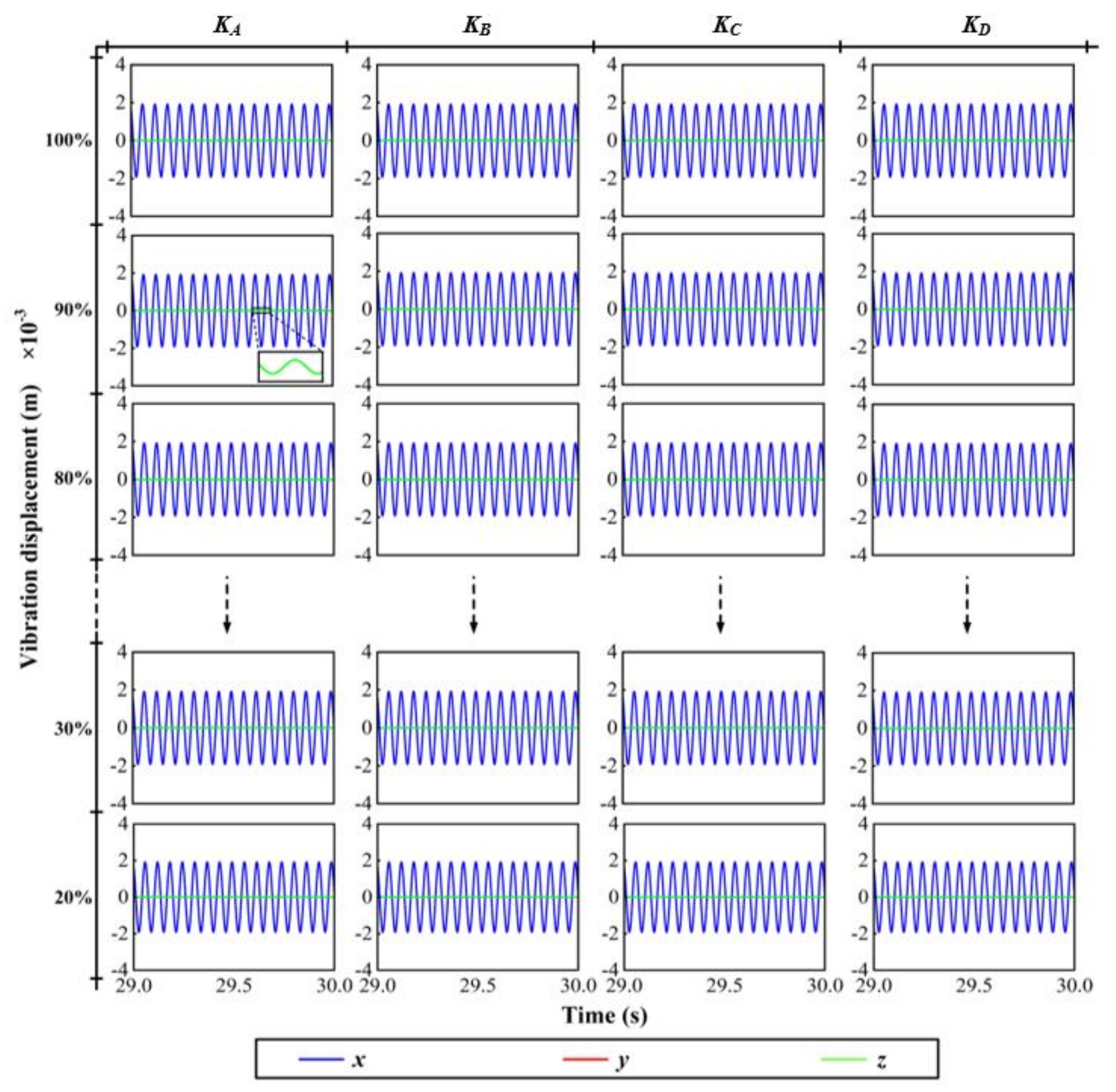
- This study identified the impact of spring health on vibration displacement and vibration angle. It can be found that the vibration of the mining vibrating screen with faulty single-group springs changes into a very complicated spatial motion, which includes three translations and three rotations. Additionally, the vibration displacement in the X and Y directions decreases and that in the Z direction increases as the health of single-group springs decreases. The vibration angle around the X and Y axes increases. However, the changing trends of the vibration angle around the Z axis are different when the faulty single-group springs are located at the feed side and the out-feed side. These response changes will provide valuable insights for the fault diagnosis of single-group springs in the vibrating screen.
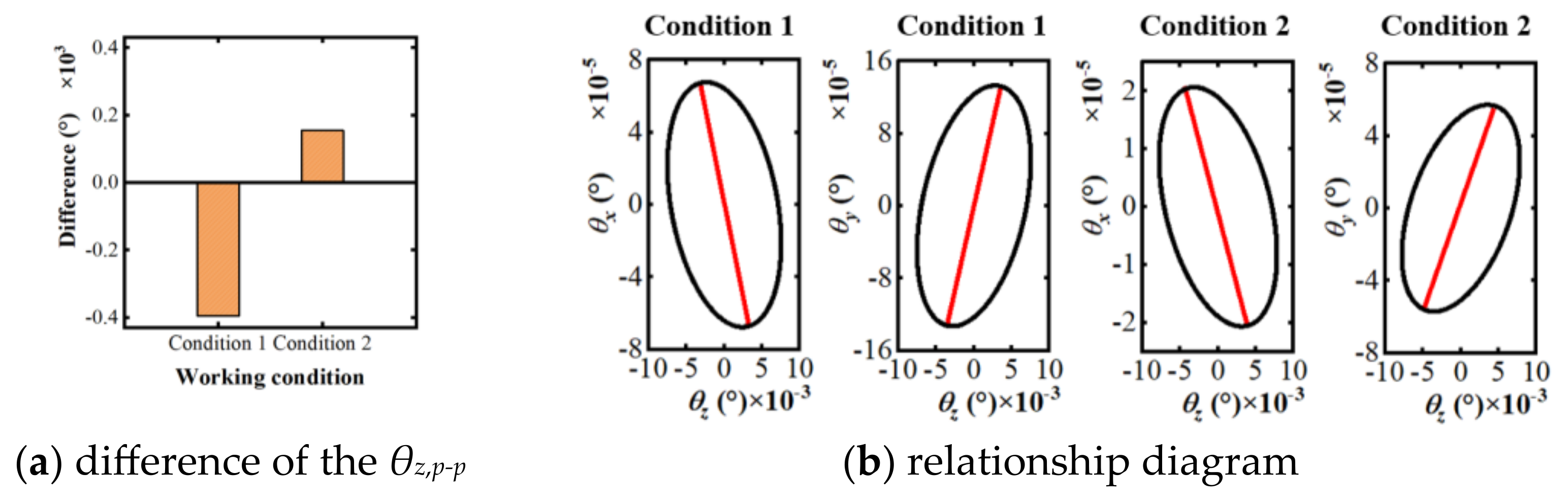
- (3)
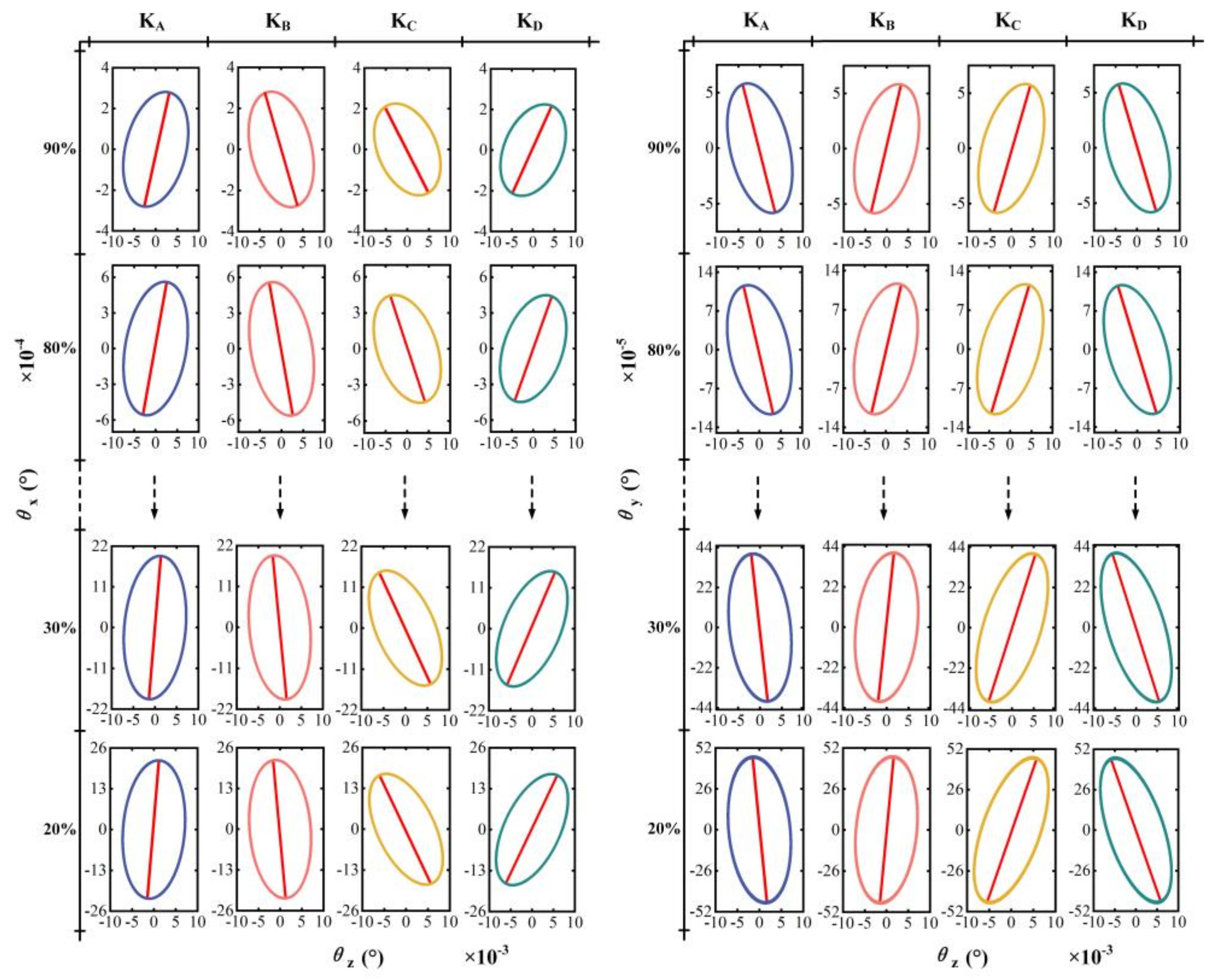
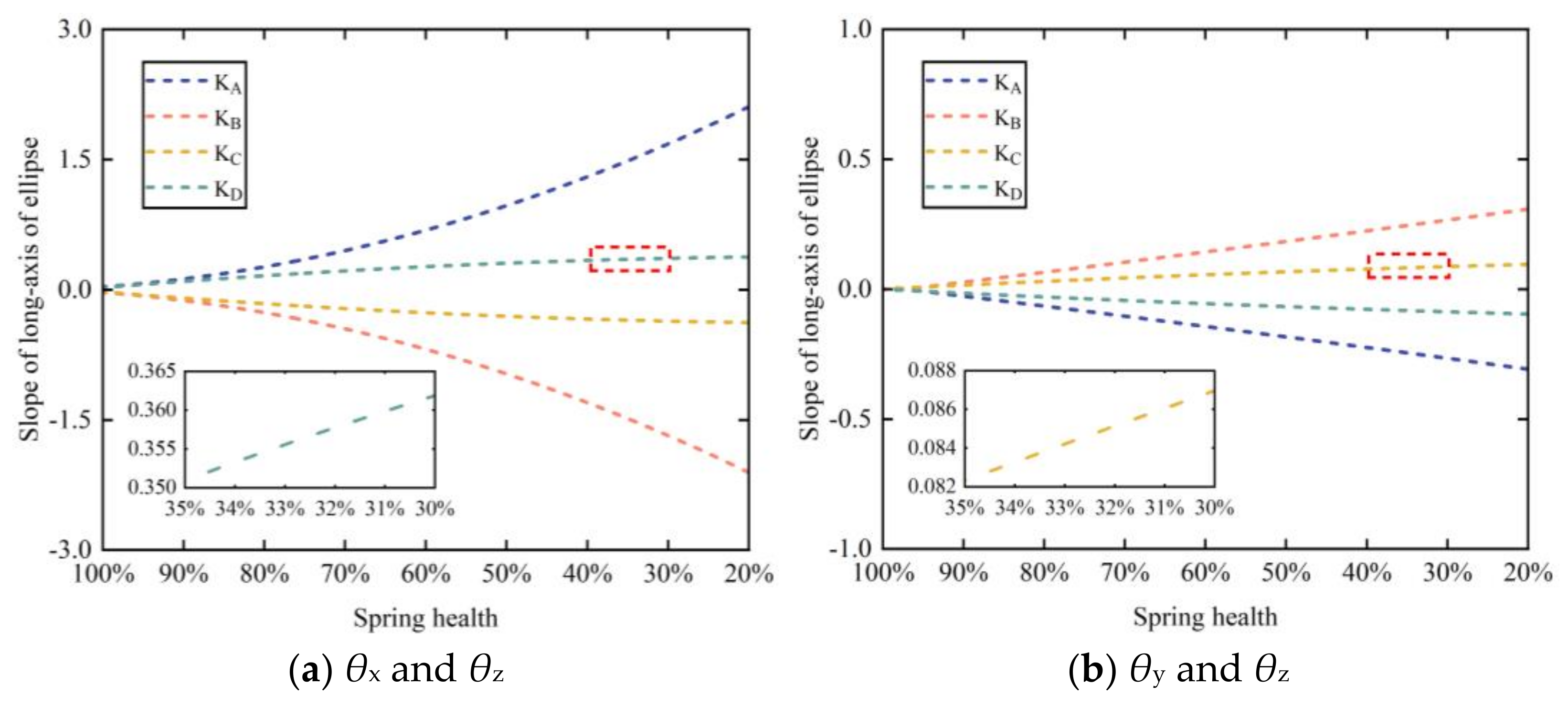
- The locating method of the faulty single-group springs is proposed. The method indicates that the peak-to-peak value of the vibration angle around the Z axis can be used to determine whether the failed spring group is located at the feed side or the out-feed side. The positive and negative of the slopes of the long axis of the ellipse composed of vibration angle can be used to determine the specific location of the faulty spring group.
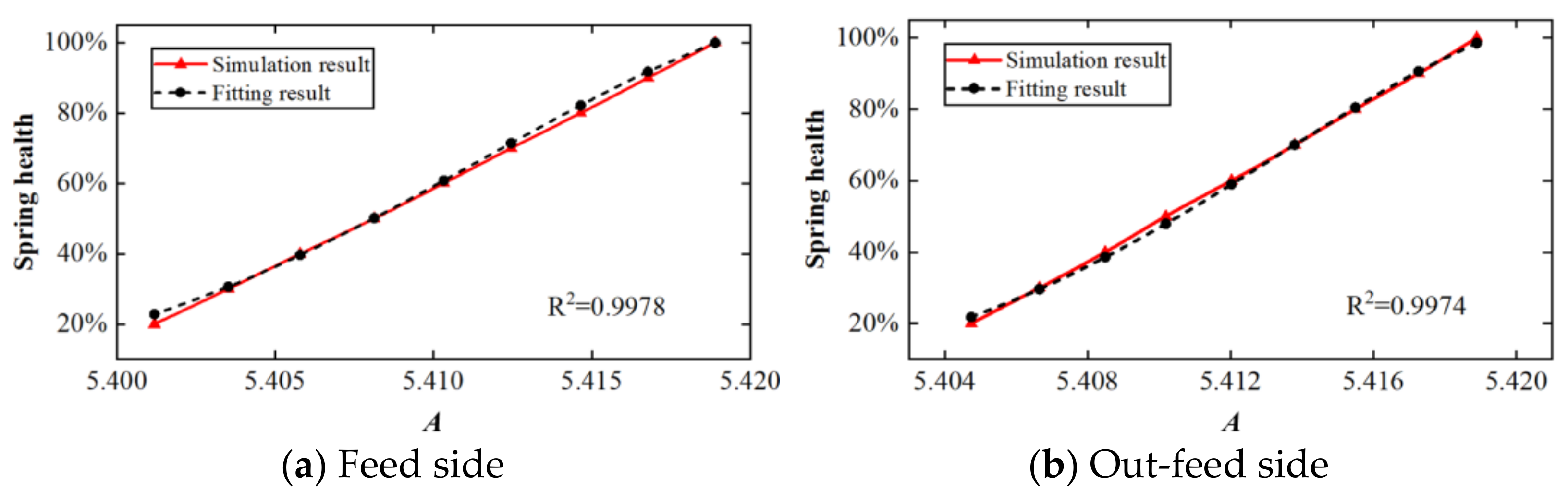
- (4)
- It can be found that vibration displacement varies under different spring health states. The evaluation formulas for spring health are proposed based on the relationship between vibration displacement and spring health. These formulas show a high goodness of fit (R2 > 0.9) and are verified using ABAQUS simulations, with errors of 1.7% and 0.66%, respectively.
- (5)
- The proposed diagnostic model provides useful theoretical assistance for diagnosing faulty single-group springs in mining vibrating screens, contributing to improved maintenance strategies and operational reliability. However, further study and experiments need to be conducted to identify whether this model can be extrapolated to actual single-group spring failure monitoring.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, H.C. Analysis and Research on Fatigue Failure of Damping Spring of Linear Vibrating Screen; Jiangnan University: Wuxi, China, 2022. [Google Scholar]
- Peng, L.-P.; Liu, C.-S.; Li, J.; Wang, H. Static-deformation based fault diagnosis for damping spring of large vibrating screen. J. Cent. South Univ. 2014, 21, 1313–1321. [Google Scholar] [CrossRef]
- Liang, Y.M. Static analysis and research on large linear vibrating screen. Mech. Eng. 2015, 72–73. [Google Scholar] [CrossRef]
- Liu, C.S.; Peng, L.P.; Wang, H.; Li, J. Fault identification for spring of large vibrating screen using free response. J. Vib. Eng. 2013, 26, 9. [Google Scholar] [CrossRef]
- Moncada, M.; Rodríguez, C.G. Response of a vibrating screen when it loses stiffness in the supports. Ingeniare Rev. Chil. Ing. 2016, 24, 25–31. [Google Scholar] [CrossRef]
- Peng, L.P. Study on Stiffness Identification for Damping Springs and Dynamic Problems of Beam Structures in a Large Vibrating Screen. Ph.D. Thesis, China University of Mining and Technology, Xuzhou, China, 2015. [Google Scholar]
- Liu, Y.; Suo, S.; Meng, G.; Shang, D.; Bai, L.; Shi, J. A Theoretical rigid body model of vibrating screen for spring failure diagnosis. Mathematics 2019, 7, 246. [Google Scholar] [CrossRef]
- Fan, G.S.; Liu, C.S.; Lou, Y.L.; Wu, J.; Liu, H.; Li, S.; He, D. Research on dynamic characteristics of complete dynamic model of vibrating screen based on spatial six degrees of freedom. J. China Univ. Min. Technol. 2024, 53, 176–185. [Google Scholar] [CrossRef]
- Cai, P. The study of feeding bias fault in ZS2264S linear vibrating screen. China Highw. 2022, 2. [Google Scholar] [CrossRef]
- Guo, J.H. Test and analysis of permanent deformation of vibrating screen spring. Coal Mine Mod. 2020, 4. [Google Scholar] [CrossRef]
- Krot, P.; Zimroz, R. Methods of springs failures diagnostics in ore processing vibrating screens. IOP Conf. Ser. Earth Environ. Sci. 2019, 362, 012147. [Google Scholar] [CrossRef]
- Bao, J.H.; Su, Y.X.; Zhang, Z.X.; Li, G.Q. Research on influence of spring of linear vibrating screen on operation attitude of screen box. Coal Technol. 2022, 041. [Google Scholar] [CrossRef]
- Peng, L.P.; Liu, C.S.; Wang, H. Dynamic model catastrophe of a liner vibrating screen with damping spring fault. J. Vib. Shock 2012, 31, 5. [Google Scholar] [CrossRef]
- Chen, H.C.; Yan, J.X. Application of chaos theory in fault detection of vibration damping spring. Mach. Des. Manuf. 2024, 1–6. [Google Scholar] [CrossRef]
- Krot, P.; Zimroz, R.; Michalak, A.; Wodecki, J.; Ogonowski, S.; Drozda, M.; Jach, M. Development and verification of the diagnostic model of the sieving screen. Shock Vib. 2020, 2020, 8015465. [Google Scholar] [CrossRef]
- Ahmadi, N.; Rezazadeh, G.; Rahmani, A.; Ghanbari, M. Analyzing the effects of polymeric dielectric materials on micro capacitive pressure sensors: A model incorporating displacement-dependent porosity. Heliyon 2024, 10, e30626. [Google Scholar] [CrossRef] [PubMed]
- Wen, T.; Narita, F.; Kurita, H.; Jia, Y.; Shi, Y. Quantification of damage expansion influence on frequency response function of plate for structural health monitoring with integral differential method. Compos. Sci. Technol. 2023, 244, 110298. [Google Scholar] [CrossRef]
- Zhao, G.; Wang, X.; Lin, D.; Xu, N.; Yu, C.; Geng, R. Study of double-deck vibrating flip-flow screen based on dynamic stiffness characteristics of shear springs. Minerals 2021, 11, 928. [Google Scholar] [CrossRef]
- Su, R.H.; Peng, C.Y. Random Dynamic Analysis of Vibrating Screen Structure; China Coal Industry Publishing House: Beijing, China, 2012. [Google Scholar]
- Jiang, W.K.; Wu, H.J.; Zhou, H.T.; Zhu, B.L. Mechanical Vibration and Noise; Science Press: Beijing, China, 2020. [Google Scholar]
- Li, X.Y.; Zhang, M.L. Mechanical Vibrations; Tsinghua University Press: Beijing, China, 2009. [Google Scholar]
- Qiu, S.C.; An, Q. Calculation method of lateral stiffness of cylindrical helical spring. J. East China Univ. Sci. Technol. (Nat. Sci. Ed.) 2015, 41, 846–851. [Google Scholar] [CrossRef]
- Cheng, D.X. Mechanical Design Handbook; Chemical Industry Press: Beijing, China, 2008; Volume 4. [Google Scholar]
- Wang, B.T.; Cheng, D.K. Modal analysis by free vibration response only for discrete and continuous systems. J. Sound Vib. 2011, 330, 3913–3929. [Google Scholar] [CrossRef]
- Liu, Y.; Meng, G.; Suo, S.; Li, D.; Wang, A.; Cheng, X.; Yang, J. Spring failure analysis of mining vibrating screens: Numerical and experimental studies. Appl. Sci. 2019, 9, 3224. [Google Scholar] [CrossRef]
- Yang, X.; Wu, J.; Jiang, H.; Qiu, W.; Liu, C. Dynamic modeling and parameters optimization of large vibrating screen with full degree of freedom. Shock Vib. 2019, 2019, 1915708. [Google Scholar] [CrossRef]
- Liu, Q. Research on Nonlinear Dynamic Characteristics of the Stepped Mining Pipe in Deep Sea Mining; Shandong University of Science and Technology: Qingdao, China, 2023. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| m1/kg | 12,210 |
| m2/kg | 6232 |
| Jx, Jy, Jz/(kg∙m2) | 29,900, 64,900, 38,200 |
| knx, kny, knz (n = A, B, C, D)/(N/m) | 477,806, 912710, 477,806 |
| dnx, dny, dnz (n = A, B, C, D)/m | 2.440, 0.318, 2.147 |
| β/(°) | 45 |
| ω/(rad/s) | 101.578 |
| f/N | 508,280 |
| Parameters | MATLAB | ABAQUS | Error/% |
|---|---|---|---|
| x/m | 3.81 × 10−3 | 3.83 × 10−3 | 0.52 |
| y/m | 3.85 × 10−3 | 3.84 × 10−3 | 0.26 |
| θz/(°) | 1.542 × 10−2 | 1.538 × 10−2 | 0.26 |
| Failure Location | Composition of Relationship Diagram | |
|---|---|---|
| θx, θz | θy, θz | |
| KA | + 1 | - |
| KB | - 2 | + |
| Failure Location | Composition of Relationship Diagram | |
|---|---|---|
| θx, θz | θy, θz | |
| KC | - | + |
| KD | + | - |
| Spring Health | xp-p (m) × 10−3 | yp-p (m) × 10−3 | zp-p (m) × 10−5 | |||
|---|---|---|---|---|---|---|
| KA or KB | KC or KD | KA or KB | KC or KD | KA or KB | KC or KD | |
| 100% | 3.8147 | 3.8147 | 3.8487 | 3.8487 | 0 | 0 |
| 90% | 3.8137 | 3.8138 | 3.8467 | 3.8473 | 0.0047 | 0.0036 |
| 80% | 3.8128 | 3.8129 | 3.8446 | 3.8457 | 0.0087 | 0.0074 |
| 70% | 3.8118 | 3.8120 | 3.8425 | 3.8442 | 0.0120 | 0.0114 |
| 60% | 3.8109 | 3.8111 | 3.8404 | 3.8426 | 0.0148 | 0.0155 |
| 50% | 3.8100 | 3.8101 | 3.8382 | 3.8410 | 0.0170 | 0.0198 |
| 40% | 3.8090 | 3.8093 | 3.8359 | 3.8394 | 0.0183 | 0.0243 |
| 30% | 3.8081 | 3.8084 | 3.8336 | 3.8377 | 0.0191 | 0.0290 |
| 20% | 3.8071 | 3.8074 | 3.8313 | 3.8360 | 0.0193 | 0.0385 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, X.; Chu, C.; Wang, Z.; Lu, H. Study on Fault Diagnosis of Single-Group Springs of Mining Vibrating Screen. Symmetry 2024, 16, 832. https://doi.org/10.3390/sym16070832
Cai X, Chu C, Wang Z, Lu H. Study on Fault Diagnosis of Single-Group Springs of Mining Vibrating Screen. Symmetry. 2024; 16(7):832. https://doi.org/10.3390/sym16070832
Chicago/Turabian StyleCai, Xiaoxiao, Changyong Chu, Zhenyu Wang, and Hao Lu. 2024. "Study on Fault Diagnosis of Single-Group Springs of Mining Vibrating Screen" Symmetry 16, no. 7: 832. https://doi.org/10.3390/sym16070832