
A Virtual Synchronous Generator-Based Control Strategy and Pre-Synchronization Method for a Four-Leg Inverter under Unbalanced Loads


Abstract
1. Introduction
- (1)
- An improved VSG control strategy for a four-leg inverter is proposed. The improved virtual impedance control and power calculation method are used to keep the output voltages symmetrical and stable in the case of load symmetry. The results show that the voltage unbalance ratio can be reduced by 89%.
- (2)
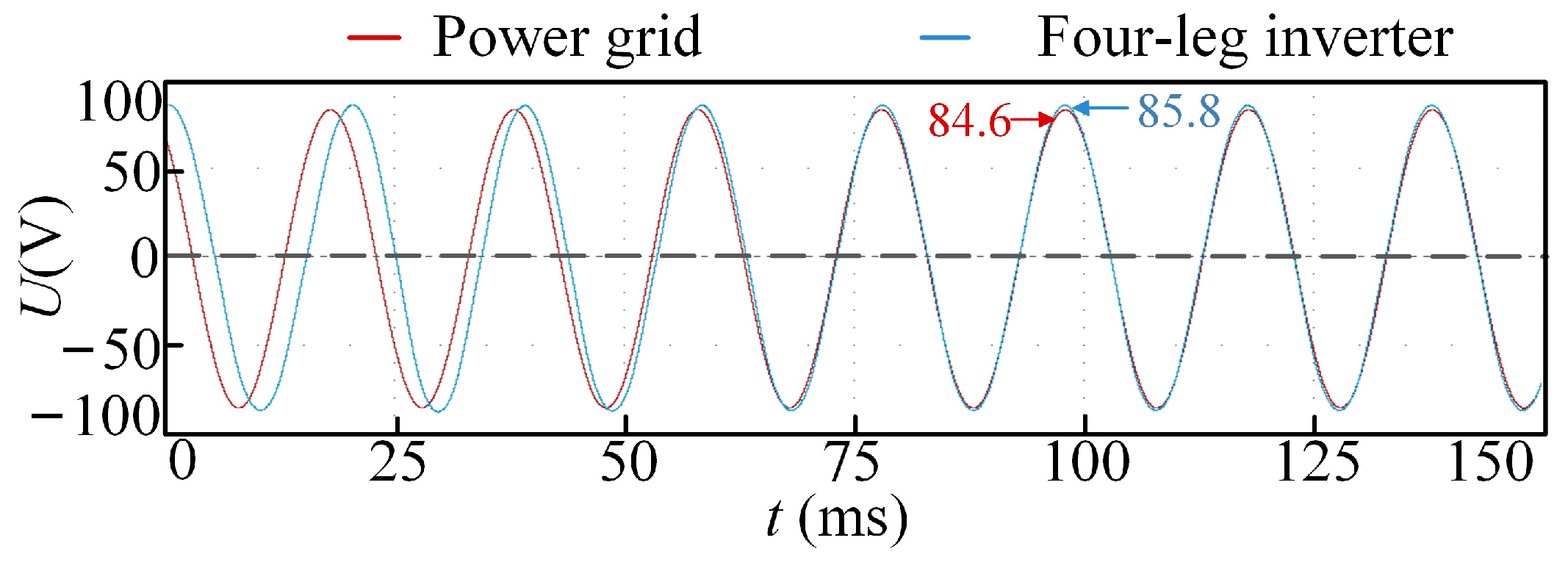
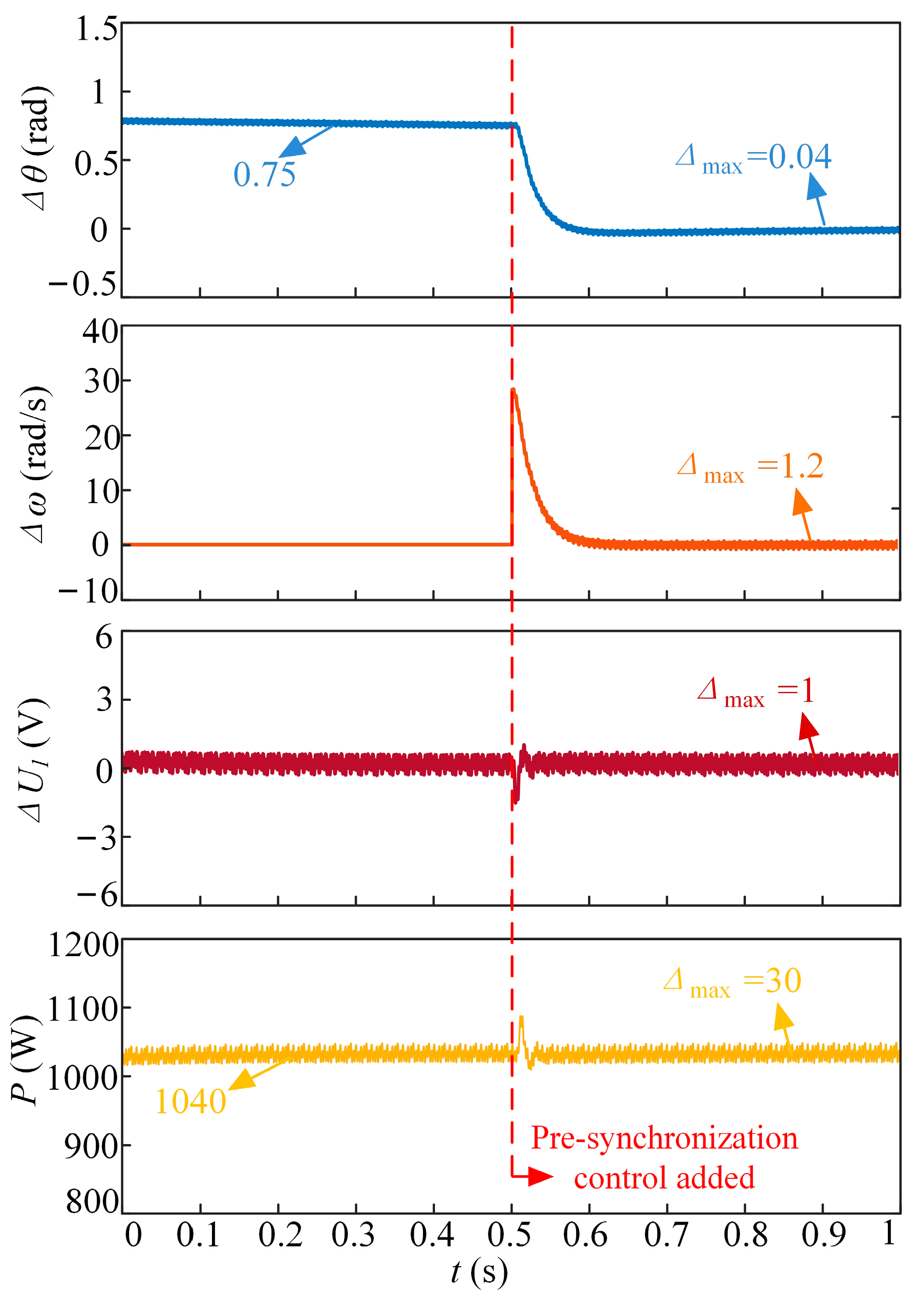
- A pre-synchronization control strategy is put forward. The control loops for voltage amplitude and phase are developed according to the proposed VSG control strategy. Results indicate that the difference in amplitude and phase angle between the inverter output voltages and the grid voltage decreases.
- (3)
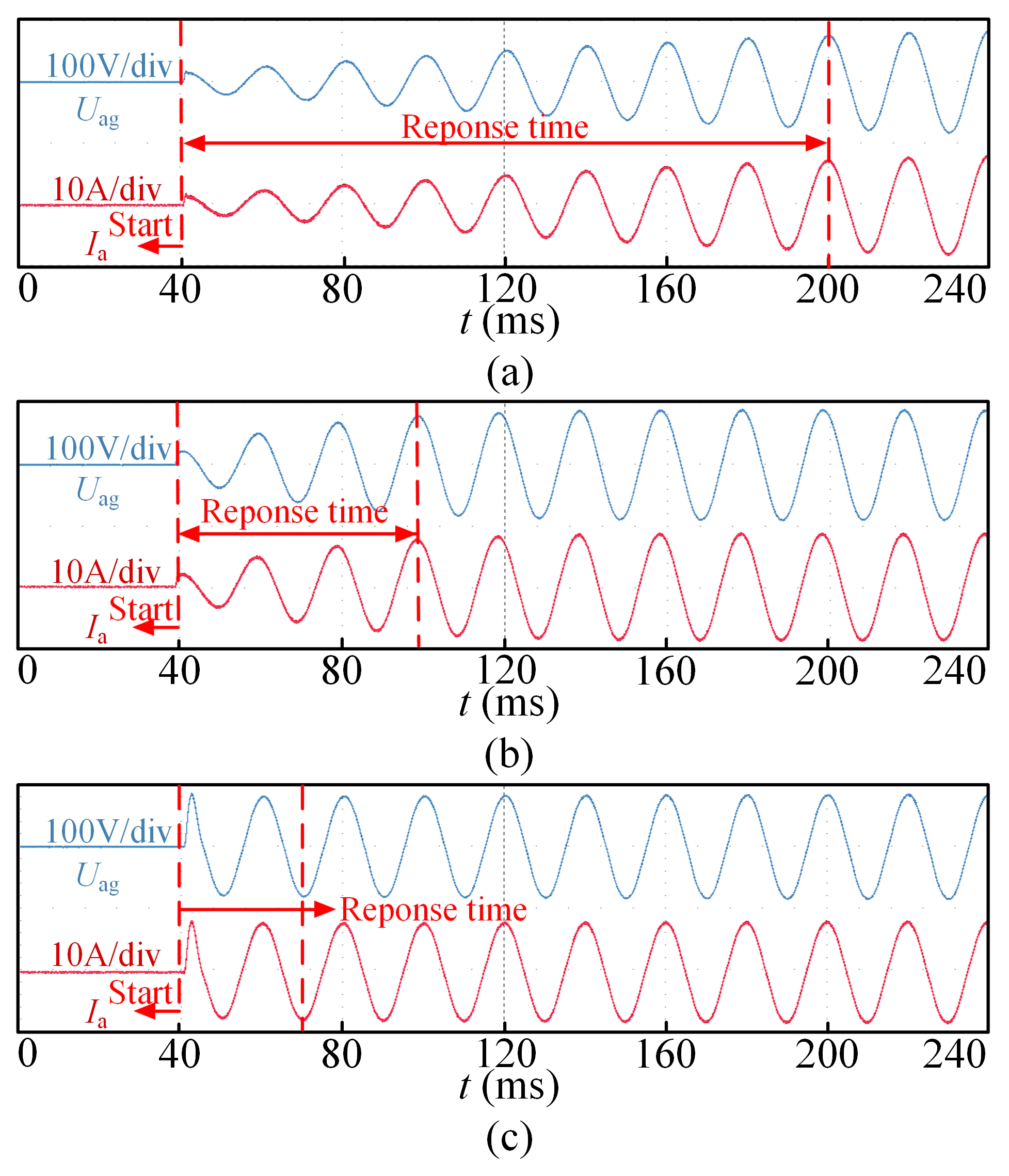
- An optimized design method for control parameters is presented. Considering the stability margins, the parameters of the voltage and current control loop are independently optimized to obtain faster dynamic performance. From the experimental results, the response time can be shortened by 50%.
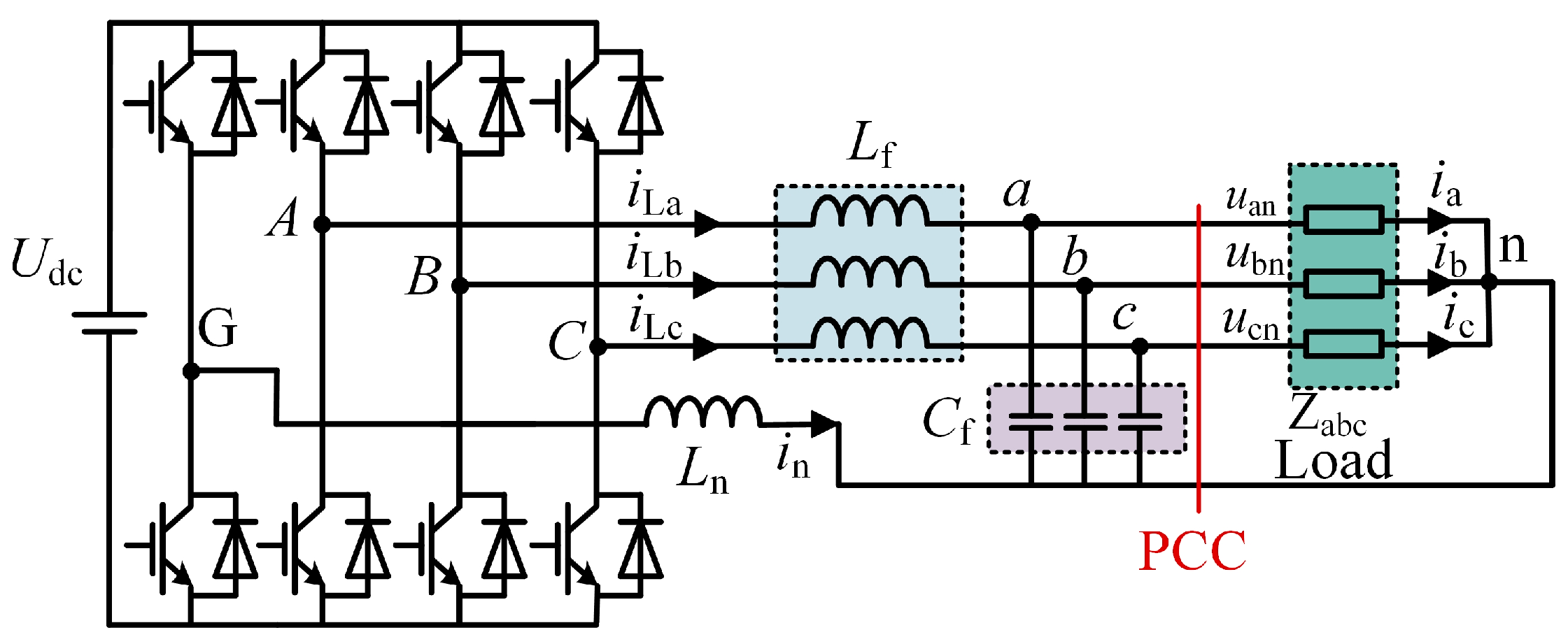
2. Mathematical Model of Four-Leg Inverter
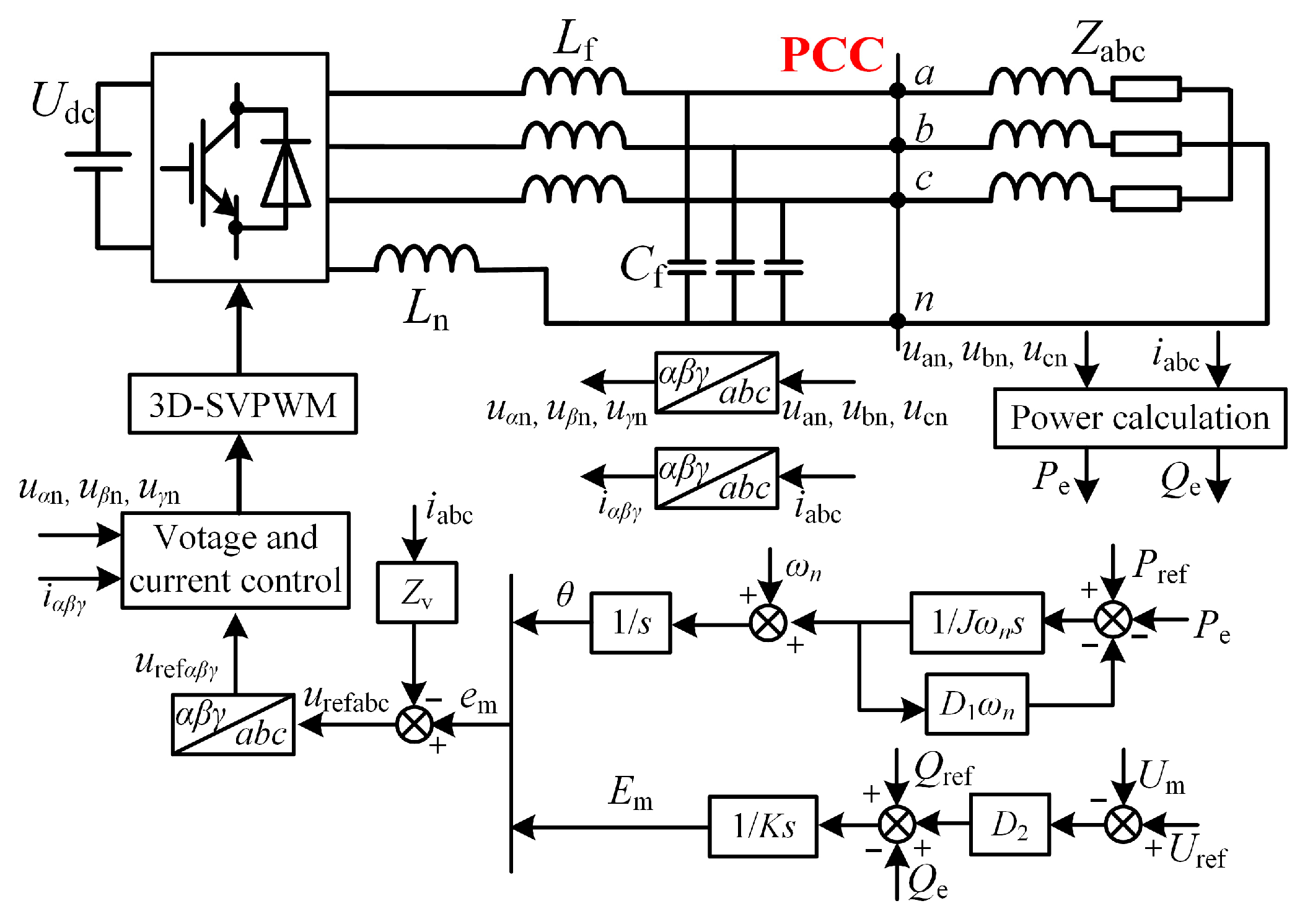
3. Improved VSG Control Strategy for a Four-Leg Inverter
3.1. Problems in the Existing Control Strategy
3.2. Improved VSG Control Strategy
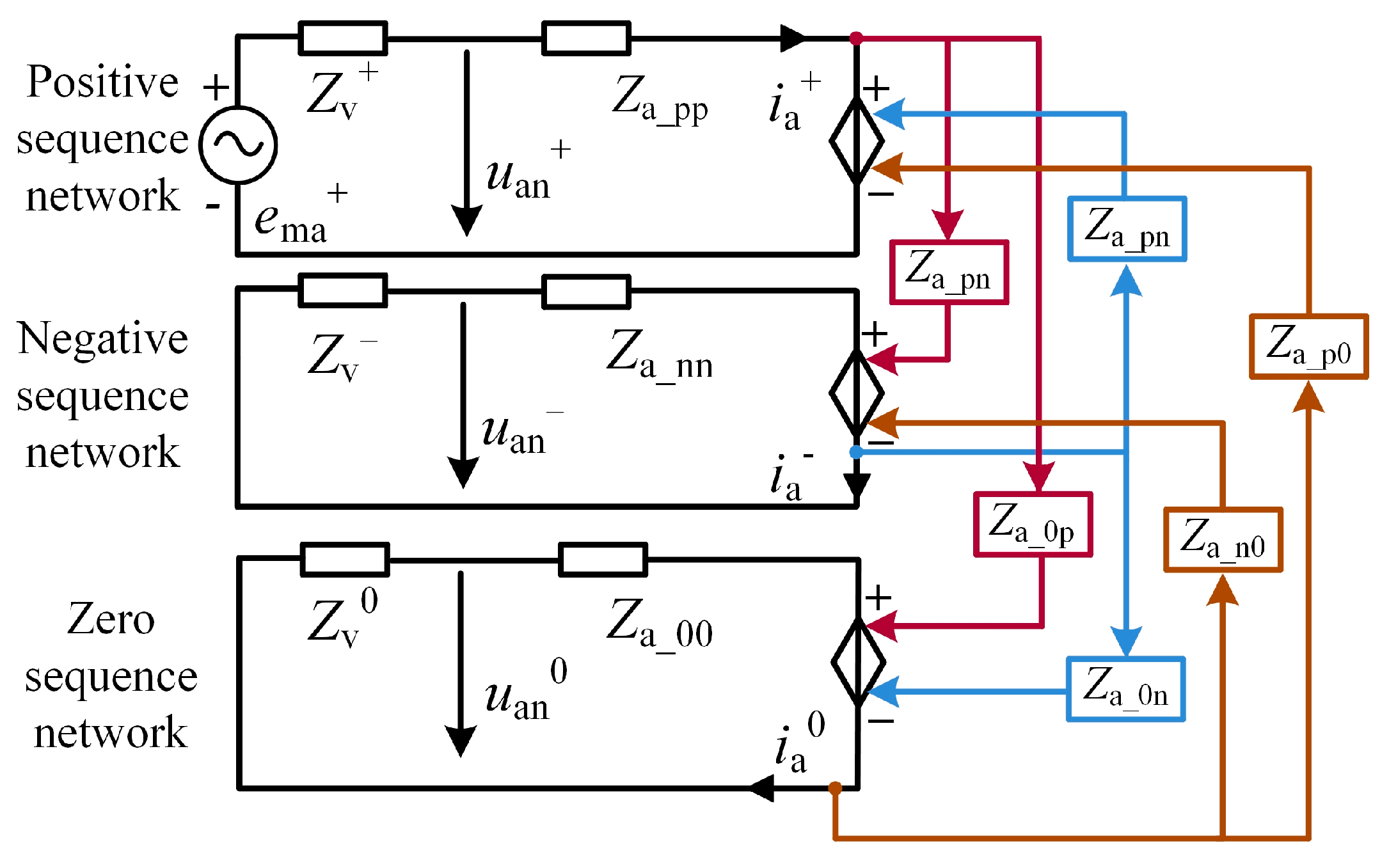
3.2.1. Improved Virtual Impedance Method
3.2.2. Power Calculation Method
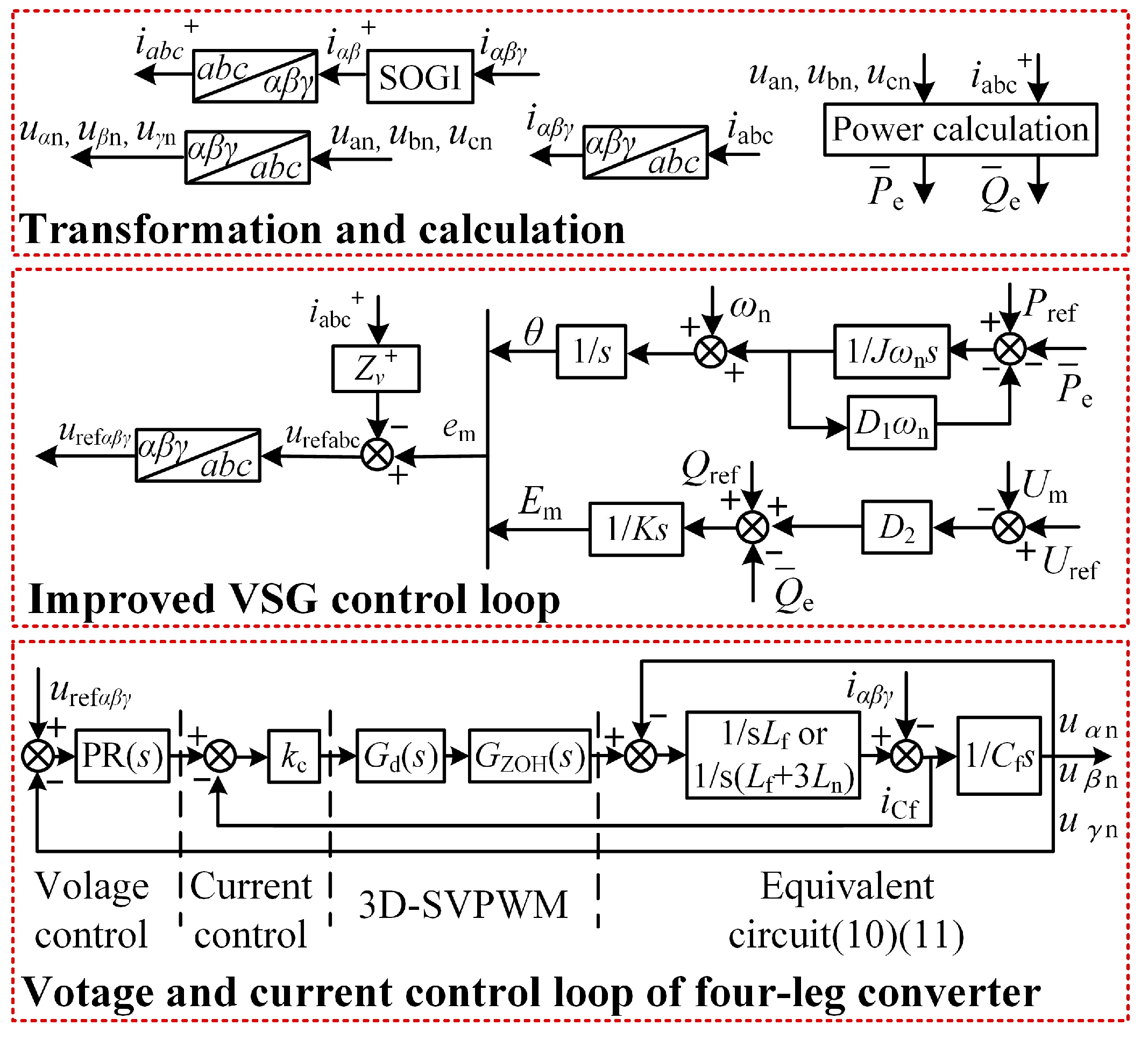
3.2.3. Control Block Diagram
4. Improved VSG Pre-Synchronization Control Strategy for a Four-Leg Inverter
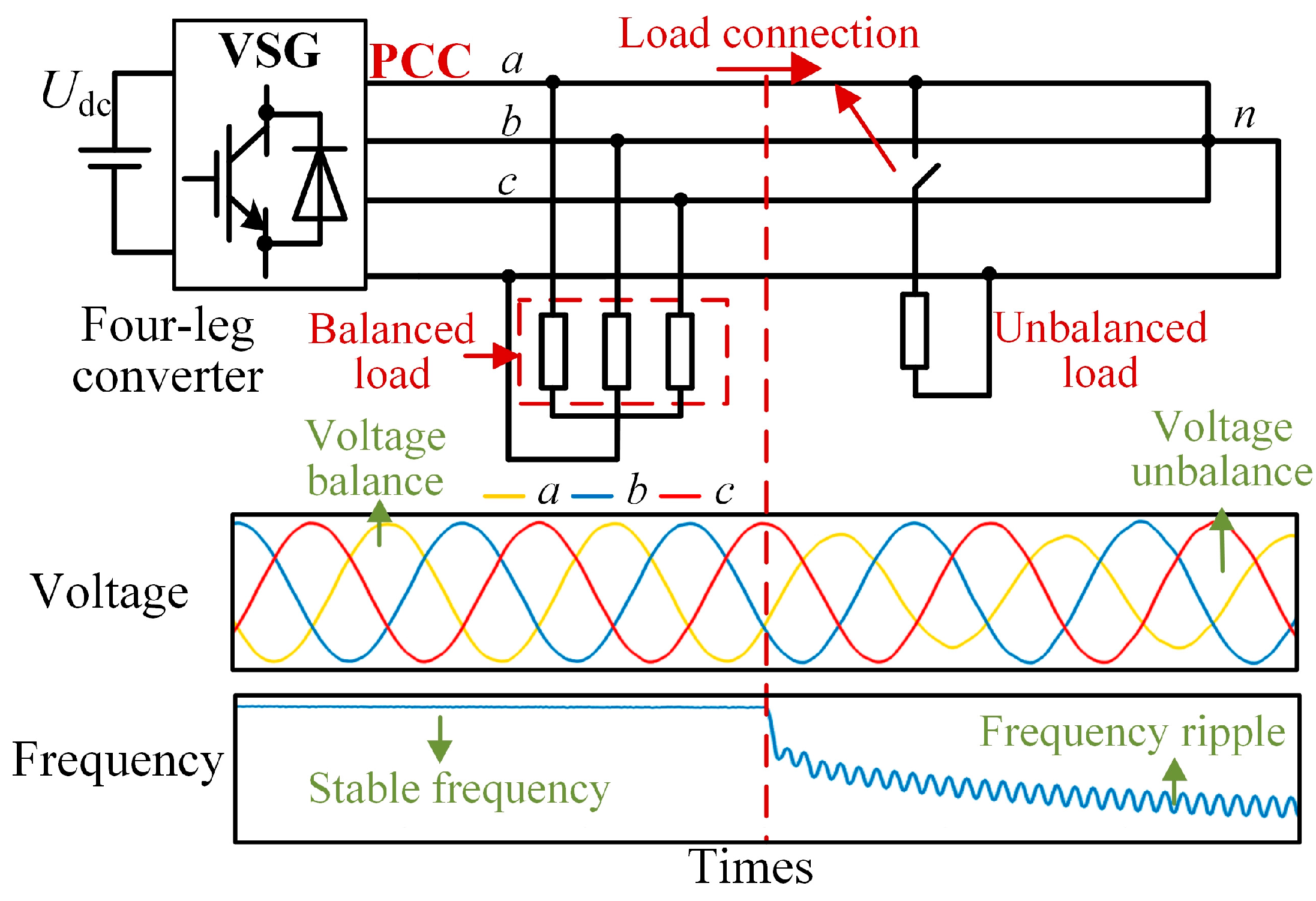
4.1. Analysis of a VSG Control Strategy from Isolated Mode to Grid-Connected Mode under Unbalanced Loads
4.2. Design of Improved VSG-Based Pre-Synchronization Control Strategy
4.2.1. Phase Pre-Synchronization
4.2.2. Amplitude Pre-Synchronization
5. Optimized Parameters Design Method
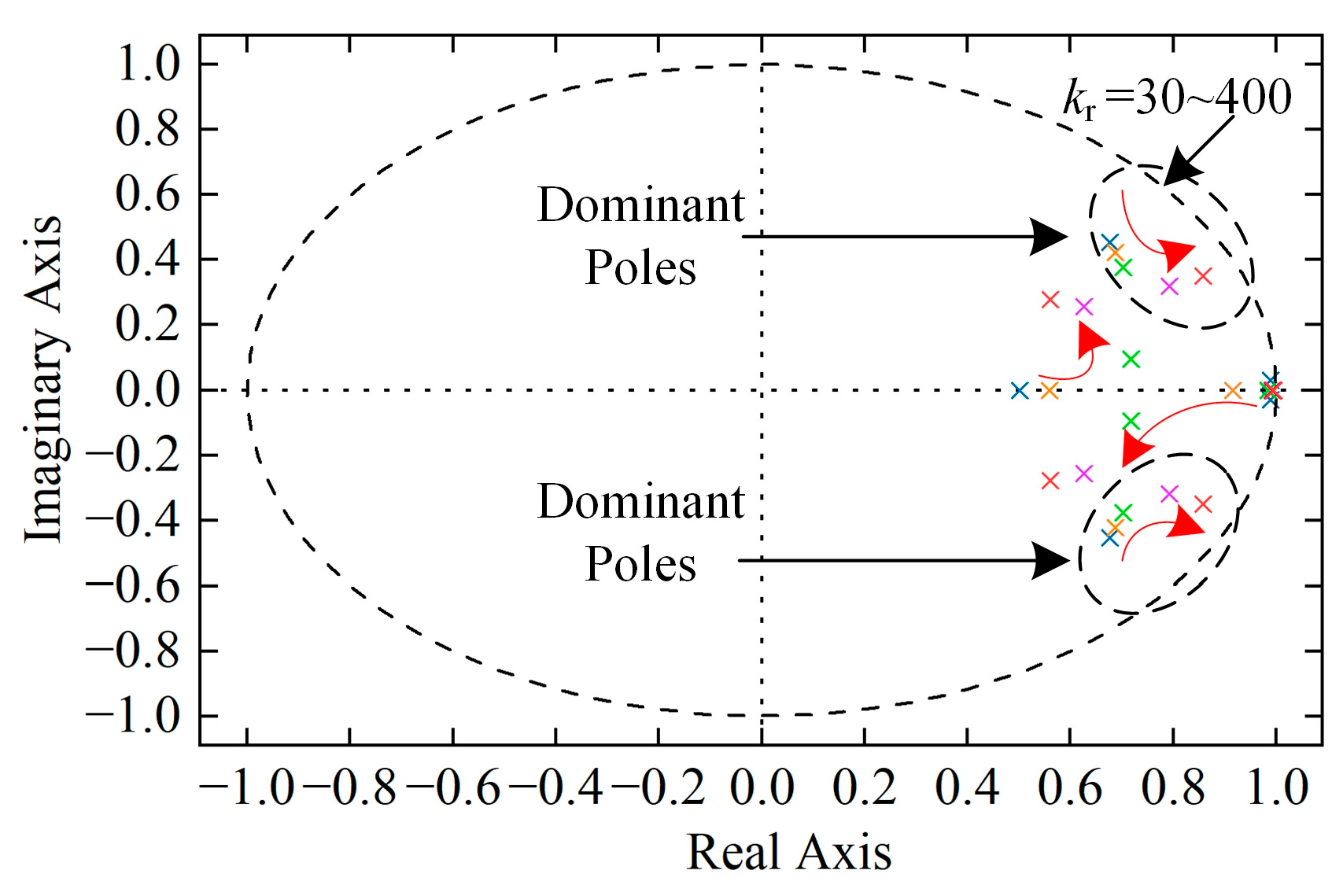
5.1. Parameters Design for Current Control Loop
5.2. Parameters Design for Voltage Control Loop
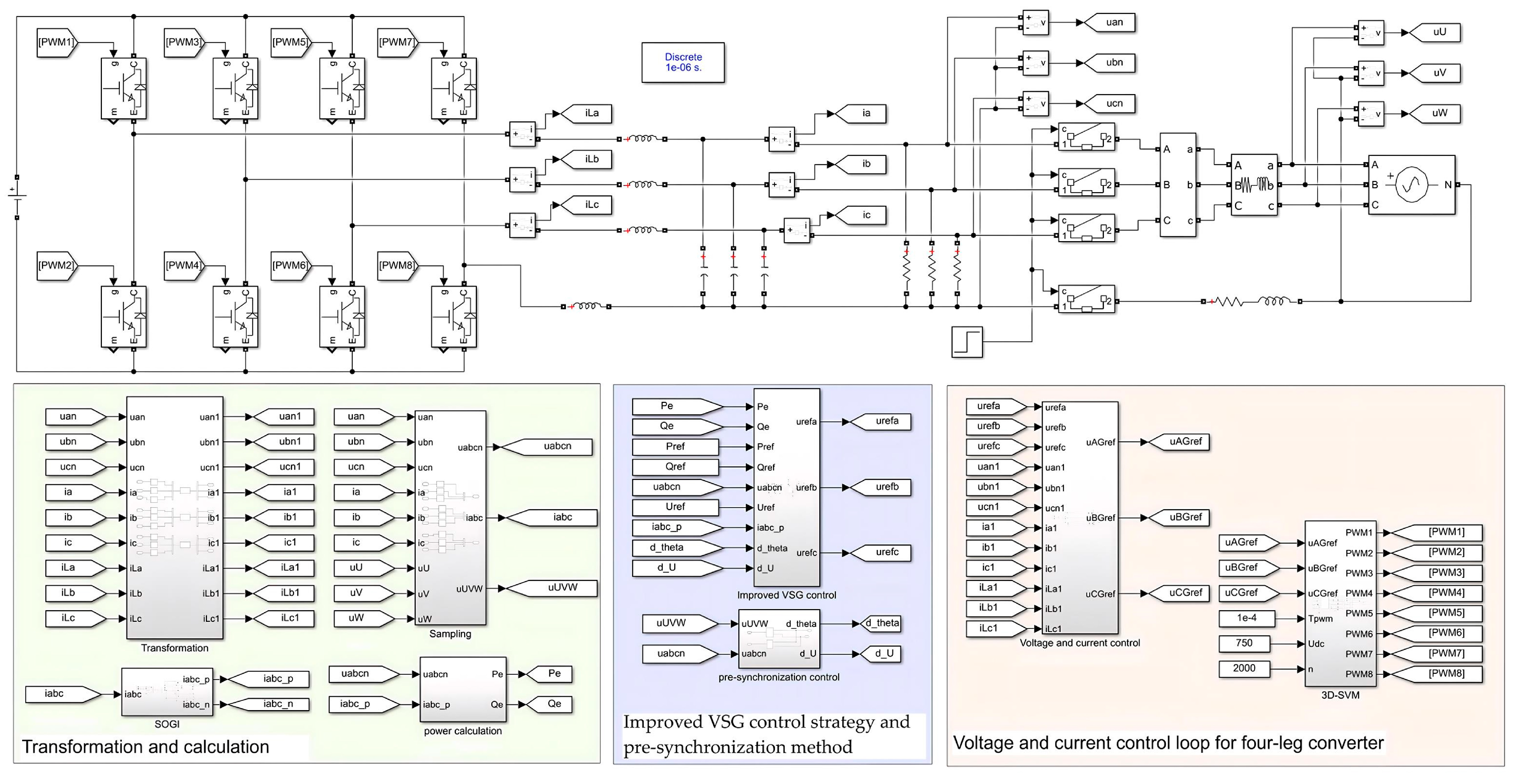
6. Simulation Verifications
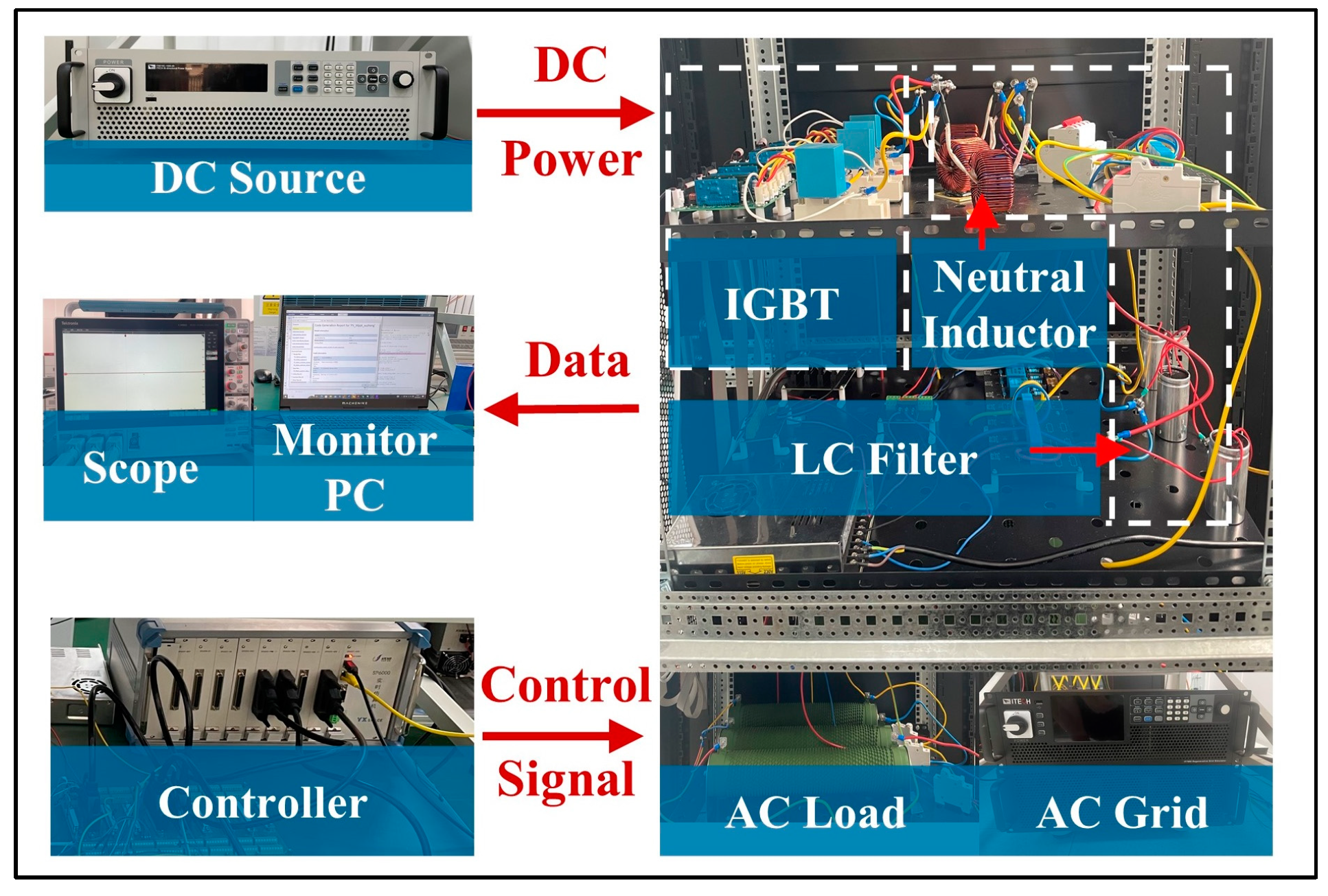
7. Experimental Verifications
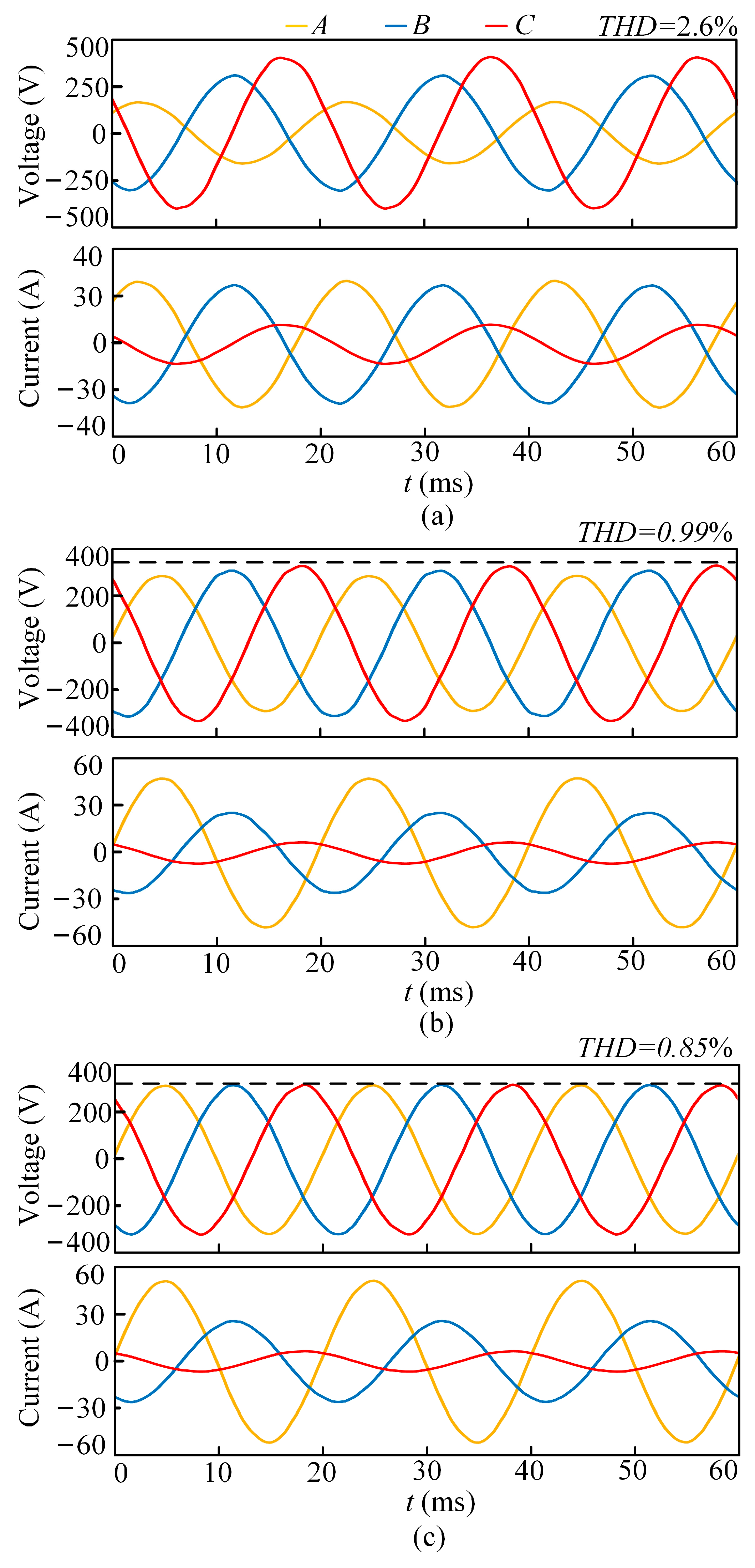
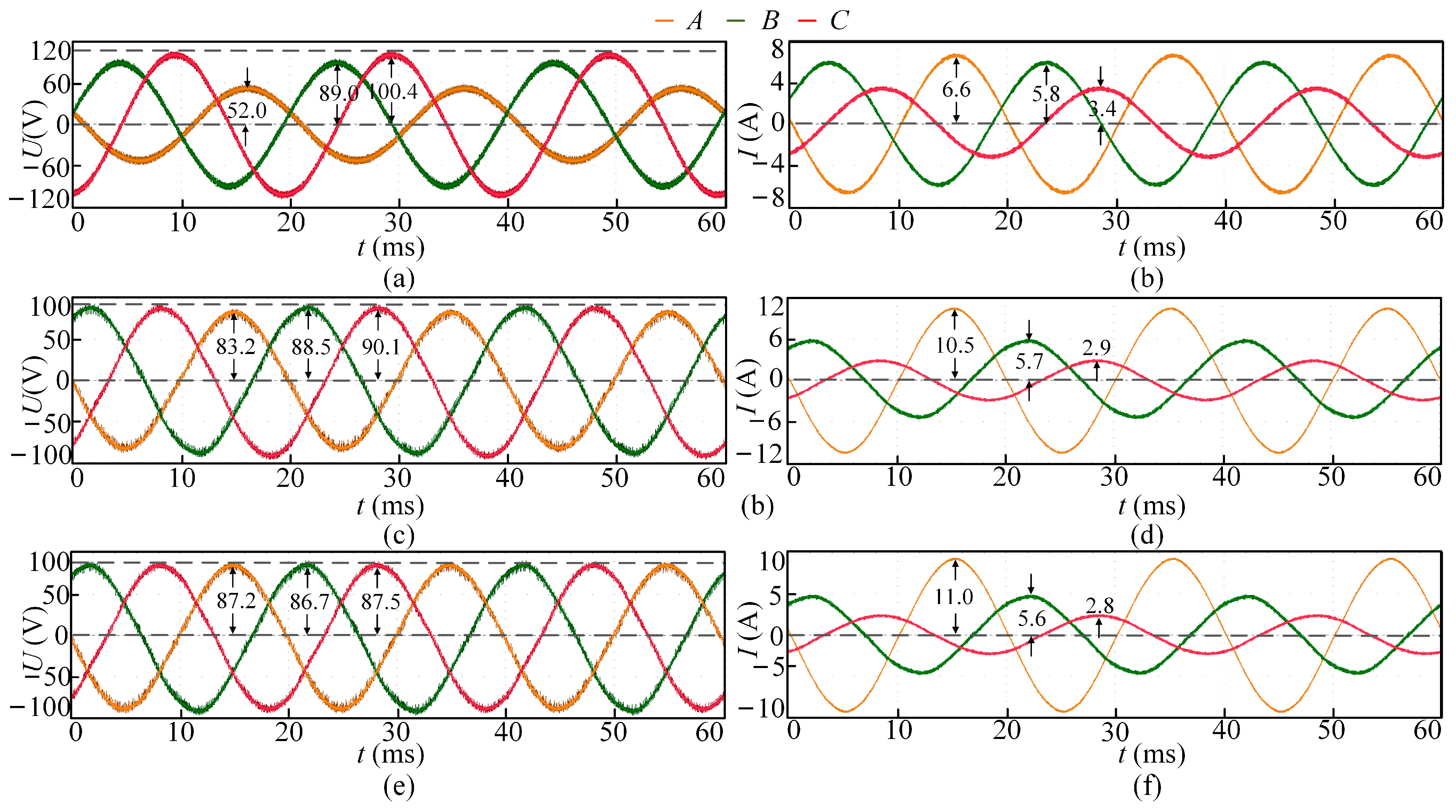
7.1. Verifications of Improved VSG Control Strategy
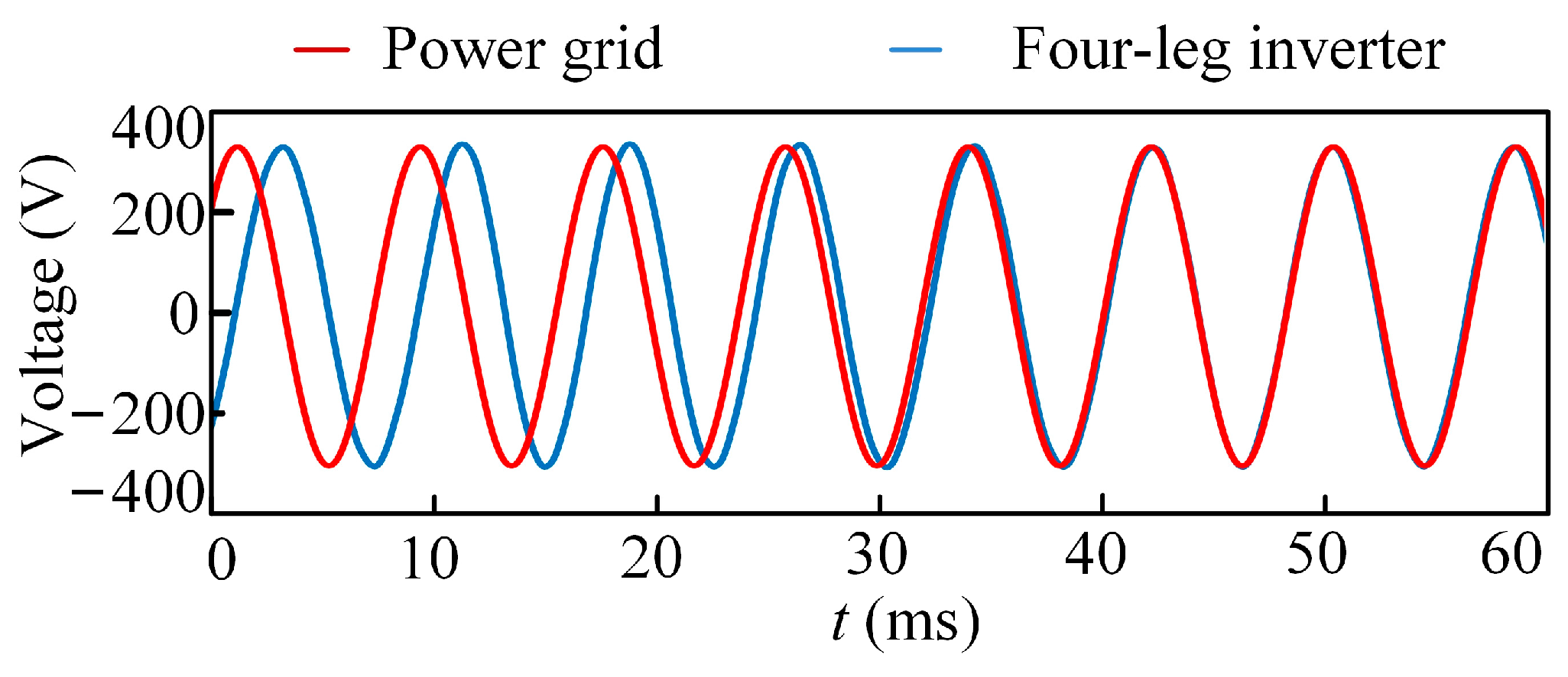
7.2. Verifications of Improved VSG Pre-Synchronization Control Strategy
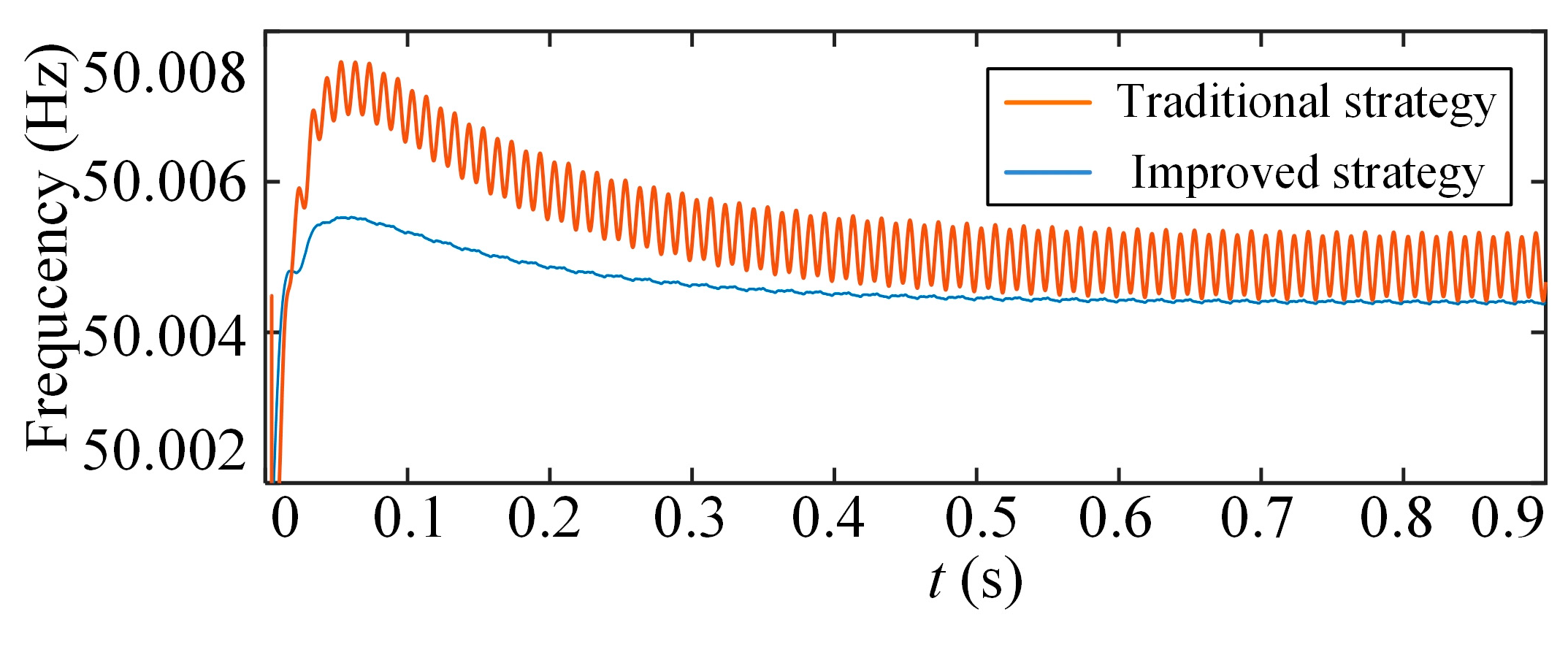
7.3. Verifications of Optimized Parameters Design Method
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| VSG | Virtual synchronous generator. |
| PSO | Particle swarm optimization. |
| PWM | Pulse width modulation. |
| MPC | Model predictive control. |
| 3D-SVM | Three-dimensional space vector modulation. |
| PI | Proportional-integral. |
| PR | Proportional-resonant. |
| PCC | Point of common coupling. |
| P | Proportional. |
| RMS | Root mean square. |
| SOGI | Second order generalized integrator. |
| GM | Gain margin. |
| PM | Phase margin. |
| PLL | Phase-locked loop. |
| THD | Total harmonic distortion. |
| Parameters | |
| Lf, Ln | Inductor of LC filter, neutral inductor. |
| Cf | Capacitor of LC filter. |
| Udc | Voltage at the DC side of the four-leg inverter. |
| uA, uB, uC, uG | Arm voltages relative to the negative terminal on the DC side. |
| uAG, uBG, uCG | Arm voltages relative to the fourth leg (G). |
| da, db, dc, dg | Duty cycles of each upper arm switch. |
| uan, ubn, ucn | Load voltages. |
| iLa, iLb, iLc | Currents of the filter inductor. |
| ia, ib, ic | Currents of the loads. |
| in | Currents of the neutral inductor. |
| uαG, uβG, uγG | Arm voltages relative to the fourth leg (G) in the αβγ reference frame. |
| uαn, uβn, uγn | Load voltages in the αβγ reference frame. |
| iLα, iLβ, iLγ | Filter currents inductor in the αβγ reference frame. |
| iα, iβ, iγ | Load currents of the in the αβγ reference frame. |
| Pref, Qref | Reference active power and reactive power at PCC points. |
| Pe, Qe | Calculated active power and reactive power at PCC points. |
| D1 | Damping coefficient. |
| D2 | Voltage regulation coefficient. |
| J | Virtual inertia constant. |
| K | Integral regulation coefficient. |
| ωn, ω | Reference angular frequency and output angular frequency. |
| em | Internal electric potential of VSG. |
| Em | Magnitude of em. |
| Uref, Um | Magnitude voltages of the output reference and measurement. |
| Zv | Virtual impedance of VSG. |
| urefabc | Reference of uan, ubn, ucn. |
| urefαβγ | Reference of uan, ubn, ucn in the αβγ reference frame. |
| iabc | Three-phase currents of the loads. |
| I, U | RMS of ia, ib, ic, RMS of uan, ubn, ucn. |
| Za, Zb, Zc | Impedances of the load. |
| Sequence components of uan, ubn, ucn. | |
| Sequence components of ia, ib, ic. | |
| Za_pp, Za_nn, Za_00 | Sequence components of Za, Zb, Zc. |
| Za_ij | Coupling impedance between sequence i and sequence j of Za, Zb, Zc. |
| Sequence components of em. | |
| Sequence components of Zv. | |
| Pm | RMS of oscillating power at PCC points. |
| Average active and reactive power at PCC points. | |
| Ts | Sampling period. |
| ZLine | Line impedance. |
| uU, uV, uW | Voltages of power grid. |
| uα, uβ | Voltages of power grid in the αβγ reference frame. |
| ud, uq | Voltages of power grid in the dq reference frame. |
| θg | Voltage phase of the power grid. |
| uqn | uan, ubn, ucn in the dq reference frame. |
| Δω | Difference phase between the voltages of grid and converter output. |
| Ug | RMS of uU, uV, uW. |
| ωr | |
| ωi | Frequency band where the error of z transformation is reduced. |
| kc | Proportional parameter of current control loop. |
| kc_O | Optimized parameter of the current control loop on the α and β axis. |
| kc_Oγ | Optimized parameter of the current control loop on the γ axis. |
| kv, kr | Proportional and resonant parameters of voltage control loop. |
| kr_O | Optimized parameter of the voltage control loop on the α and β axis. |
| kr_Oγ | Optimized parameter of the voltage control loop on the γ axis. |
References
- Deng, F.; Yao, W.; Zhang, X.; Tang, Y.; Mattavelli, P. Review of impedance-reshaping-based power sharing strategies in islanded AC microgrids. IEEE Trans. Smart Grid 2022, 14, 1692–1707. [Google Scholar] [CrossRef]
- Vukojevic, A.; Lukic, S. Microgrid protection and control schemes for seamless transition to island and grid synchronization. IEEE Trans. Smart Grid 2020, 11, 2845–2855. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.A.A.; Guerrero, J.M. MAS-based distributed coordinated control and optimization in microgrid and microgrid clusters: A comprehensive overview. IEEE Trans. Power Electron. 2017, 33, 6488–6508. [Google Scholar] [CrossRef]
- Kryonidis, G.C.; Kontis, E.O.; Chrysochos, A.I.; Oureilidis, K.O.; Demoulias, C.S.; Papagiannis, G.K. Power flow of islanded AC microgrids: Revisited. IEEE Trans. Smart Grid 2018, 9, 3903–3905. [Google Scholar] [CrossRef]
- Bottrell, N.; Prodanovic, M.; Green, T.C. Dynamic stability of a microgrid with an active load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Hou, X.; Sun, Y.; Zhang, X.; Lu, J.; Wang, P.; Guerrero, J.M. Improvement of frequency regulation in VSG-Based AC microgrid via adaptive virtual inertia. IEEE Trans. Power Electron. 2019, 35, 1589–1602. [Google Scholar] [CrossRef]
- Jain, A.; Pathak, M.K.; Padhy, N.P. Conjoint enhancement of VSG dynamic output responses by disturbance-oriented adaptive parameters. IEEE Trans. Ind. Inform. 2023, 20, 2079–2096. [Google Scholar] [CrossRef]
- Pournazarian, B.; Sangrody, R.; Lehtonen, M.; Gharehpetian, G.B.; Pouresmaeil, E. Simultaneous optimization of virtual synchronous generators parameters and virtual impedances in islanded microgrids. IEEE Trans. Smart Grid 2022, 13, 4202–4217. [Google Scholar] [CrossRef]
- Ke, S.; Yang, J.; Chen, L.; Fan, P.; Shi, X.; Li, G.; Wu, F.; Ligao, J. A frequency control strategy for EV stations based on MPC-VSG in islanded microgrids. IEEE Trans. Ind. Inform. 2023, 20, 1819–1831. [Google Scholar] [CrossRef]
- Long, B.; Liao, Y.; Chong, K.T.; Rodríguez, J.; Guerrero, J.M. MPC-controlled virtual synchronous generator to enhance frequency and voltage dynamic performance in islanded microgrids. IEEE Trans. Smart Grid 2021, 12, 953–964. [Google Scholar] [CrossRef]
- Liu, T.; Chen, A.; Gao, F.; Liu, X.; Li, X.; Hu, S. Double-loop control strategy with cascaded model predictive control to improve frequency regulation for islanded microgrids. IEEE Trans. Smart Grid 2021, 13, 3954–3967. [Google Scholar] [CrossRef]
- Cheng, H.; Shuai, Z.; Shen, C.; Liu, X.; Li, Z.; Shen, Z.J. Transient angle stability of paralleled synchronous and virtual synchronous generators in islanded microgrids. IEEE Trans. Power Electron. 2020, 35, 8751–8765. [Google Scholar] [CrossRef]
- Huang, J.; Lin, X.; Sun, J.; Xu, H. A Stabilization Control Strategy for Wind Energy Storage Microgrid Based on Improved Virtual Synchronous Generator. Energies 2024, 17, 2567. [Google Scholar] [CrossRef]
- Chen, Y.; Han, W.; Hu, Y.; Zhang, Y. Adaptive Control for Improved Virtual Synchronous Generator Under Imbalanced Grid Voltage. IEEE Open J. Ind. Electron. Soc. 2024, 5, 722–736. [Google Scholar] [CrossRef]
- Vekhande, V.; Kanakesh, V.K.; Fernandes, B.G. Control of three-phase bidirectional current-source converter to inject balanced three-phase currents under unbalanced grid voltage condition. IEEE Trans. Power Electron. 2015, 31, 6719–6737. [Google Scholar] [CrossRef]
- Jia, J.; Yang, G.; Nielsen, A.H. A review on grid-connected converter control for short-circuit power provision under grid unbalanced faults. IEEE Trans. Power Deliv. 2017, 33, 649–661. [Google Scholar] [CrossRef]
- Ninad, N.A.; Lopes, L.A.C. Per-phase vector (dq) controlled three-phase grid-forming inverter for stand-alone systems. In Proceedings of the 2011 IEEE 20th International Symposium on Industrial Electronics (ISIE), Gdansk, Poland, 18 August 2011; pp. 1626–1631. [Google Scholar]
- Sun, Y.; Liu, Y.; Su, M.; Han, H.; Li, X. Topology and control of a split-capacitor four-wire current source inverter with leakage current suppression capability. IEEE Trans. Power Electron. 2017, 33, 10803–10814. [Google Scholar] [CrossRef]
- Lin, Z.; Ruan, X.; Jia, L.; Zhao, W.; Liu, H.; Rao, P. Optimized design of the neutral inductor and filter inductors in three-phase four-wire inverter with split DC-link capacitors. IEEE Trans. Power Electron. 2018, 34, 247–262. [Google Scholar] [CrossRef]
- Stecca, M.; Soeiro, T.B.; Iyer, A.K.; Bauer, P.; Palensky, P. Battery storage system as power unbalance redistributor in distribution grids based on three legs four wire voltage source converter. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7601–7614. [Google Scholar] [CrossRef]
- Turnbull, F. Inverter with Electronically Controlled Neutral Terminal. U.S. Patent No. 3,775,663, 27 November 1973. [Google Scholar]
- Zhang, R.; Prasad, V.H.; Boroyevich, D.; Lee, F.C. Three-dimensional space vector modulation for four-leg voltage-source converters. IEEE Trans. Power Electron. 2002, 17, 314–326. [Google Scholar] [CrossRef]
- Dai, N.-Y.; Wong, M.-C.; Han, Y.-D. Application of a three-level NPC inverter as a three-phase four-wire power quality compensator by generalized 3DSVM. IEEE Trans. Power Electron. 2006, 21, 440–449. [Google Scholar] [CrossRef]
- Wong, M.-C.; Tang, J.; Han, Y.-D. Cylindrical coordinate control of three-dimensional PWM technique in three-phase four-wired trilevel inverter. IEEE Trans. Power Electron. 2003, 18, 208–220. [Google Scholar] [CrossRef]
- Kim, J.H.; Sul, S.K. A Carrier-based PWM method for three-phase four-leg voltage source converters. IEEE Trans. Power Electron. 2004, 19, 66–75. [Google Scholar] [CrossRef]
- Guo, X.; Yang, Y.; Wang, B.; Blaabjerg, F. Leakage current reduction of three-phase Z-source three-level four-leg inverter for transformerless PV system. IEEE Trans. Power Electron. 2018, 34, 6299–6308. [Google Scholar] [CrossRef]
- Guo, X.; Du, S.; Diao, N.; Hua, C.; Blaabjerg, F. Three-dimensional space vector modulation for four-leg current-source in-verters. IEEE Trans. Power Electron. 2023, 38, 13122–13132. [Google Scholar] [CrossRef]
- Lliuyacc, R.; Mauricio, J.M.; Gomez-Exposito, A.; Savaghebi, M.; Guerrero, J.M. Grid-forming VSC control in four-wire systems with unbalanced nonlinear loads. Electr. Power Syst. Res. 2017, 152, 249–256. [Google Scholar] [CrossRef]
- Demirkutlu, E.; Hava, A.M. A scalar resonant-filter-bank-based output-voltage control method and a scalar mini-mum-switching-loss discontinuous PWM method for the four-leg-inverter-based three-phase four-wire power supply. IEEE Trans. Ind. Appl. 2009, 45, 982–991. [Google Scholar] [CrossRef]
- Pichan, M.; Rastegar, H. Sliding-mode control of four-leg inverter with fixed switching frequency for uninterruptible power supply applications. IEEE Trans. Ind. Electron. 2017, 64, 6805–6814. [Google Scholar] [CrossRef]
- Xiao, D.; Alam, K.S.; Rahman, M.F. Predictive duty cycle control for four-leg inverters with ${LC}$ output filter. IEEE Trans. Ind. Electron. 2020, 68, 4259–4268. [Google Scholar] [CrossRef]
- Yaramasu, V.; Rivera, M.; Narimani, M.; Wu, B.; Rodriguez, J. Model predictive approach for a simple and effective load voltage control of four-leg inverter with an output LC filter. IEEE Trans. Ind. Electron. 2014, 61, 5259–5270. [Google Scholar] [CrossRef]
- Pichan, M.; Rastegar, H.; Monfared, M. Deadbeat control of the stand-alone four-leg inverter considering the effect of the neutral line inductor. IEEE Trans. Ind. Electron. 2016, 64, 2592–2601. [Google Scholar] [CrossRef]
- Djerioui, A.; Houari, A.; Saim, A.; Ait-Ahmed, M.; Pierfederici, S.; Benkhoris, M.F.; Machmoum, M.; Ghanes, M. Flatness-based grey wolf control for load voltage unbalance mitigation in three-phase four-leg voltage source inverters. IEEE Trans. Ind. Appl. 2019, 56, 1869–1881. [Google Scholar] [CrossRef]
- Wang, J.; Luo, F.; Gu, B.; Ji, Z.; Lv, Z.; Wang, T. Improved control strategies for three-phase four-leg virtual synchronous generator with unbalanced loads. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017. [Google Scholar]
- Jafariazad, A.H.; Taher, S.A.; Arani, Z.D.; Karimi, M.H.; Guerrero, J.M. Adaptive Supplementary Control of VSG Based on Virtual Impedance for Current Limiting in Grid-Connected and Islanded Microgrids. IEEE Trans. Smart Grid 2023, 15, 89–98. [Google Scholar] [CrossRef]
- Liang, X.; Andalib-Bin-Karim, C.; Li, W.; Mitolo, M.; Shabbir, N.S.K. Adaptive virtual impedance-based reactive power sharing in virtual synchronous generator controlled microgrids. IEEE Trans. Ind. Appl. 2020, 57, 46–60. [Google Scholar] [CrossRef]
- Sahin, M.E.; Blaabjerg, F. PV powered hybrid energy storage system control using bidirectional and boost converters. Electr. Pow. Compo. Sys. 2022, 49, 1260–1277. [Google Scholar] [CrossRef]
- Li, G.; Song, W.; Liu, X. Quasi-Harmonic Voltage Feedforward Control for Improving Power Quality in VSG-Based Is-landed Microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 2994–3004. [Google Scholar] [CrossRef]
- Li, Y.; Chen, J.; Wang, X.; Zhang, X.; Zhao, X. Dynamic Stability Study of Grid-Connected Inverter Based on Virtual Synchronizer under Weak Grid. Energies 2022, 15, 7091. [Google Scholar] [CrossRef]
- Guo, J.; Chen, Y.; Liao, S.; Wu, W.; Zhou, L.; Xie, Z.; Wang, X. Analysis and mitigation of low-frequency interactions between the source and load virtual synchronous machine in an islanded microgrid. IEEE Trans. Ind. Electron. 2021, 69, 3732–3742. [Google Scholar] [CrossRef]
- Song, G.; Liu, X.; Xiao, G.; Xiong, L.; Chen, B.; Wang, P. Circulating Current Suppression of Power Conversion Systems Under Unbalanced Conditions: Large-Signal Model-Based Analysis. CPSS Trans. Power Electron. 2024, 9, 152–165. [Google Scholar] [CrossRef]
- Tang, F.; Zhou, J.; Xin, Z.; Huang, S.; Loh, P.C. An improved three-phase voltage source converter with high-performance operation under unbalanced conditions. IEEE Access 2018, 6, 15908–15918. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Z. Optimal Control Parameter Design for Dual-Loop Controlled Grid-Forming VSCs. In Proceedings of the 2020 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Weihai, China, 13–15 July 2020; pp. 1430–1435. [Google Scholar]
- Shi, R.L.; Zhang, X.; Xu, H.; Liu, F.; Hu, C.; Yu, Y. Seamless Switching Control Strategy for Microgrid Operation Modes Based on Virtual Synchronous Generator. Autom. Electr. Power Syst. 2016, 40, 16–23. [Google Scholar]
- Kim, H.-S.; Jung, H.-S.; Sul, S.-K. Discrete-time voltage controller for voltage source converters with LC filter based on state-space models. IEEE Trans. Ind. Appl. 2018, 55, 529–540. [Google Scholar] [CrossRef]
- Geng, Y.; Yun, Y.; Chen, R.; Wang, K.; Bai, H.; Wu, X. Parameters design and optimization for LC-type off-grid inverters with inductor-current feedback active damping. IEEE Trans. Power Electron. 2017, 33, 703–715. [Google Scholar] [CrossRef]
- Li, X.; Lin, P.; Tang, Y.; Wang, K. Stability design of single-loop voltage control with enhanced dynamic for voltage-source converters with a low LC-resonant-frequency. IEEE Trans. Power Electron. 2018, 33, 9937–9951. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategies | Implementation Process | Dynamic Performance | Voltages Unbalance Ratio | Affected by Mismatch | Can Provide Inertia and Damping |
|---|---|---|---|---|---|
| [29,30] | Easy | Low | Low | Low | No |
| [31,32,33,34,35] | Complex | High | Low | Medium | No |
| [36] | Easy | Low | High | Low | Yes |
| Proposed method | Easy | Medium | Low | Low | Yes |
| Parameters | Value |
|---|---|
| Rated phase voltage (RMS value) Um | 60 V |
| Rated phase current I | 6 A |
| DC-side voltage Udc | 200 V |
| Filter inductance Lf | 2 mH |
| Neutral inductance Ln | 1 mH |
| Filter capacitance Cf | 30 μF |
| Fundamental frequency fn | 50 Hz |
| Sampling period Ts | 0.0001 s |
| Switching frequency fPWM | 10 kHz |
| Parameters | Value |
|---|---|
| Rated power | 13 kW |
| Rated phase voltage (RMS value) Um | 220 V |
| DC-side voltage Udc | 750 V |
| Filter inductance Lf | 2.5 mH |
| Neutral inductance Ln | 1.25 mH |
| Filter capacitance Cf | 80 μF |
| Fundamental frequency fn | 50 Hz |
| Sampling period Ts | 0.0001 s |
| Switching frequency fPWM | 10 kHz |
| Items | Parameters I | Parameters II | Optimized Parameters |
|---|---|---|---|
| Parameters on the αβ axis | kc = 5 | kc = 7.8 | kc = 6.7 |
| kv = 0.05 | kv = 0.04 | kv = 0 | |
| kr = 3 | kr = 10 | kr = 190 | |
| Parameters on the γ axis | kc = 10 | kc = 14.6 | kc = 13.8 |
| kv = 0.01 | kv = 0.02 | kv = 0 | |
| kr = 1 | kr = 2 | kr = 40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Liu, Z.; Shen, G.; Li, K.; Song, Y.; Su, B. A Virtual Synchronous Generator-Based Control Strategy and Pre-Synchronization Method for a Four-Leg Inverter under Unbalanced Loads. Symmetry 2024, 16, 1116. https://doi.org/10.3390/sym16091116
Huang Z, Liu Z, Shen G, Li K, Song Y, Su B. A Virtual Synchronous Generator-Based Control Strategy and Pre-Synchronization Method for a Four-Leg Inverter under Unbalanced Loads. Symmetry. 2024; 16(9):1116. https://doi.org/10.3390/sym16091116
Chicago/Turabian StyleHuang, Zhenshan, Zhijie Liu, Gang Shen, Kejun Li, Yuanzong Song, and Baihe Su. 2024. "A Virtual Synchronous Generator-Based Control Strategy and Pre-Synchronization Method for a Four-Leg Inverter under Unbalanced Loads" Symmetry 16, no. 9: 1116. https://doi.org/10.3390/sym16091116
APA StyleHuang, Z., Liu, Z., Shen, G., Li, K., Song, Y., & Su, B. (2024). A Virtual Synchronous Generator-Based Control Strategy and Pre-Synchronization Method for a Four-Leg Inverter under Unbalanced Loads. Symmetry, 16(9), 1116. https://doi.org/10.3390/sym16091116