

Experiments of Ultrasonic Positioning System with Symmetrical Array Used in Jiangmen Underground Neutrino Observatory



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
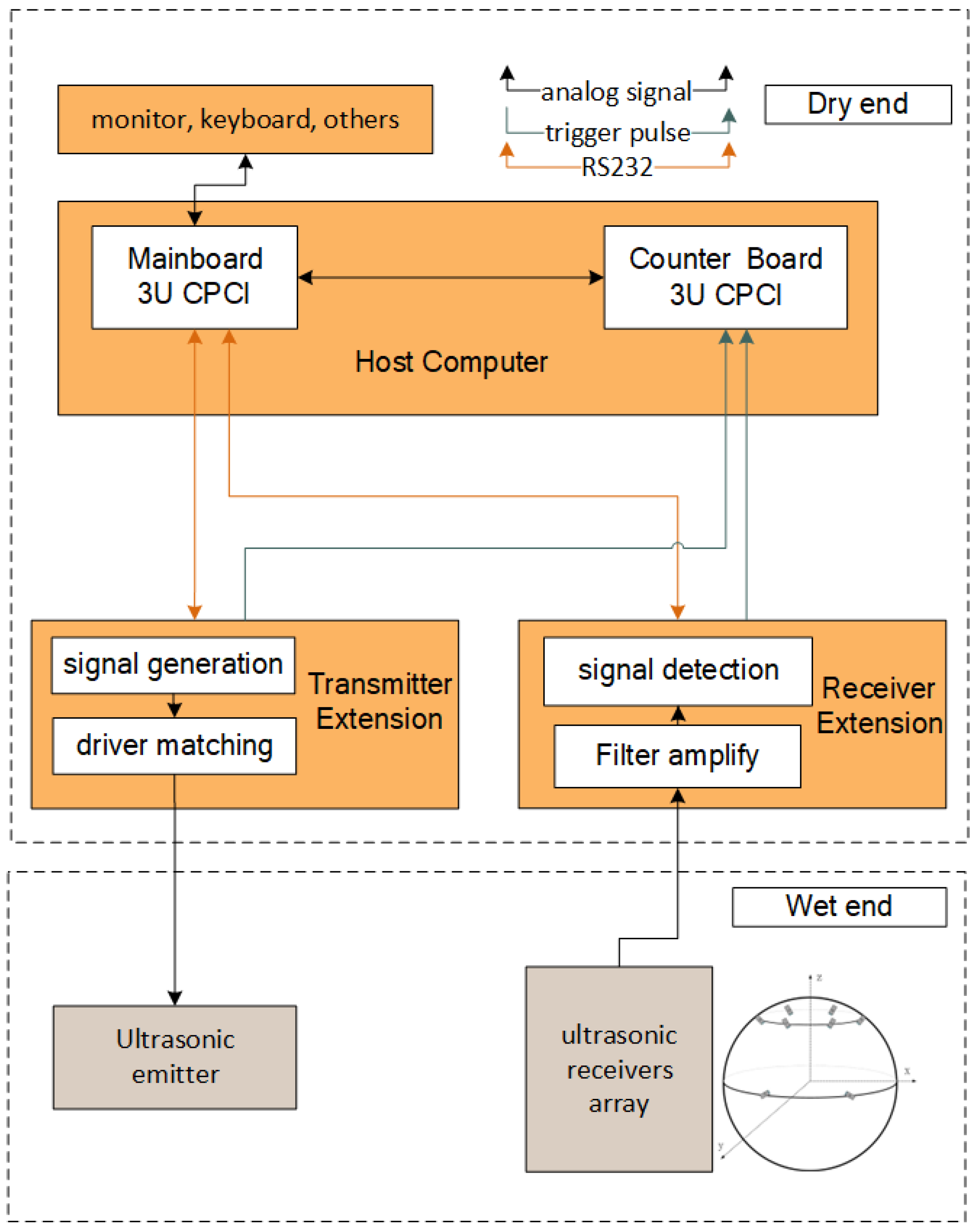
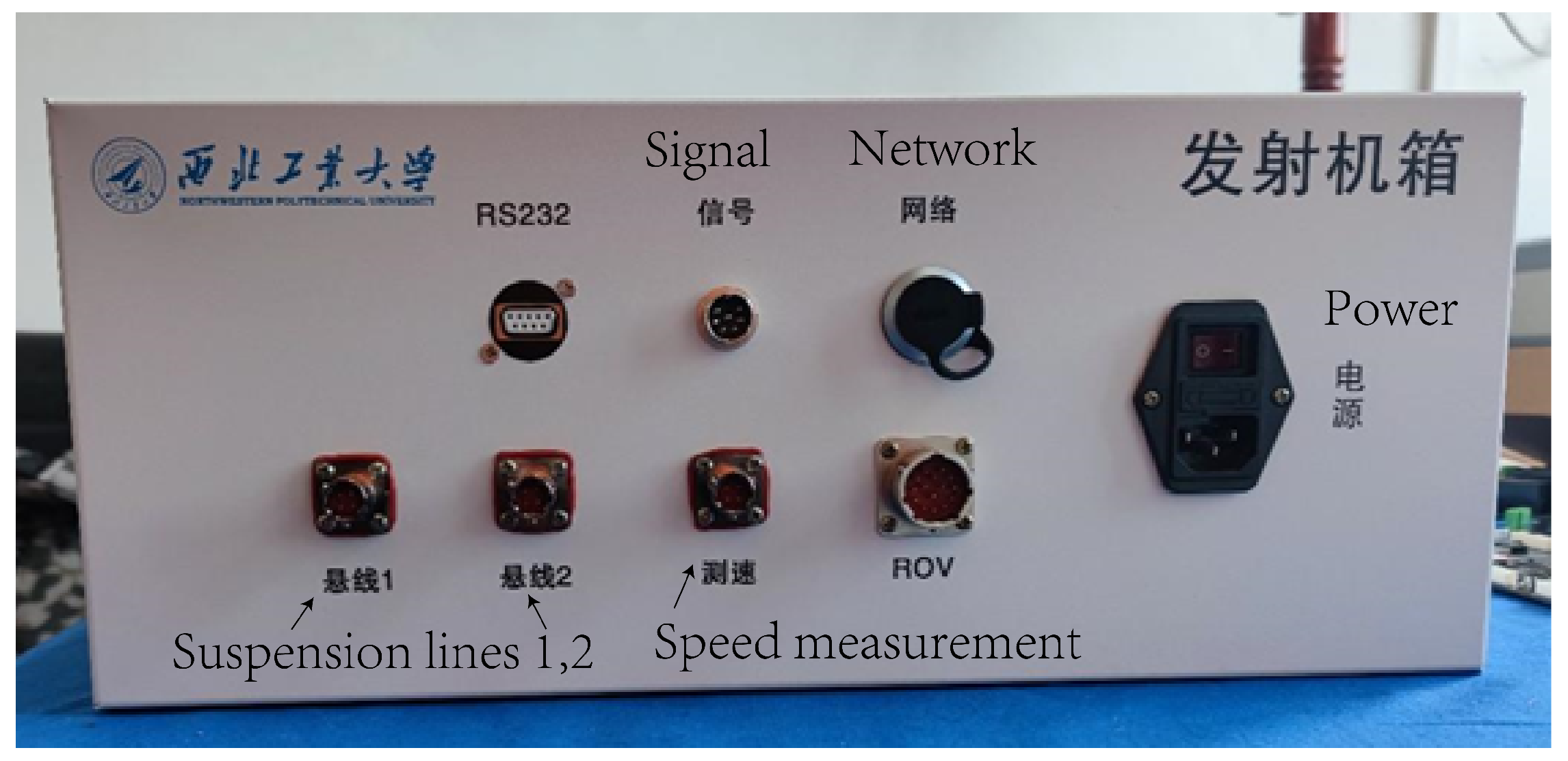
2. Configuration of Ultrasonic Positioning System
3. Realization of Ultrasonic Positioning
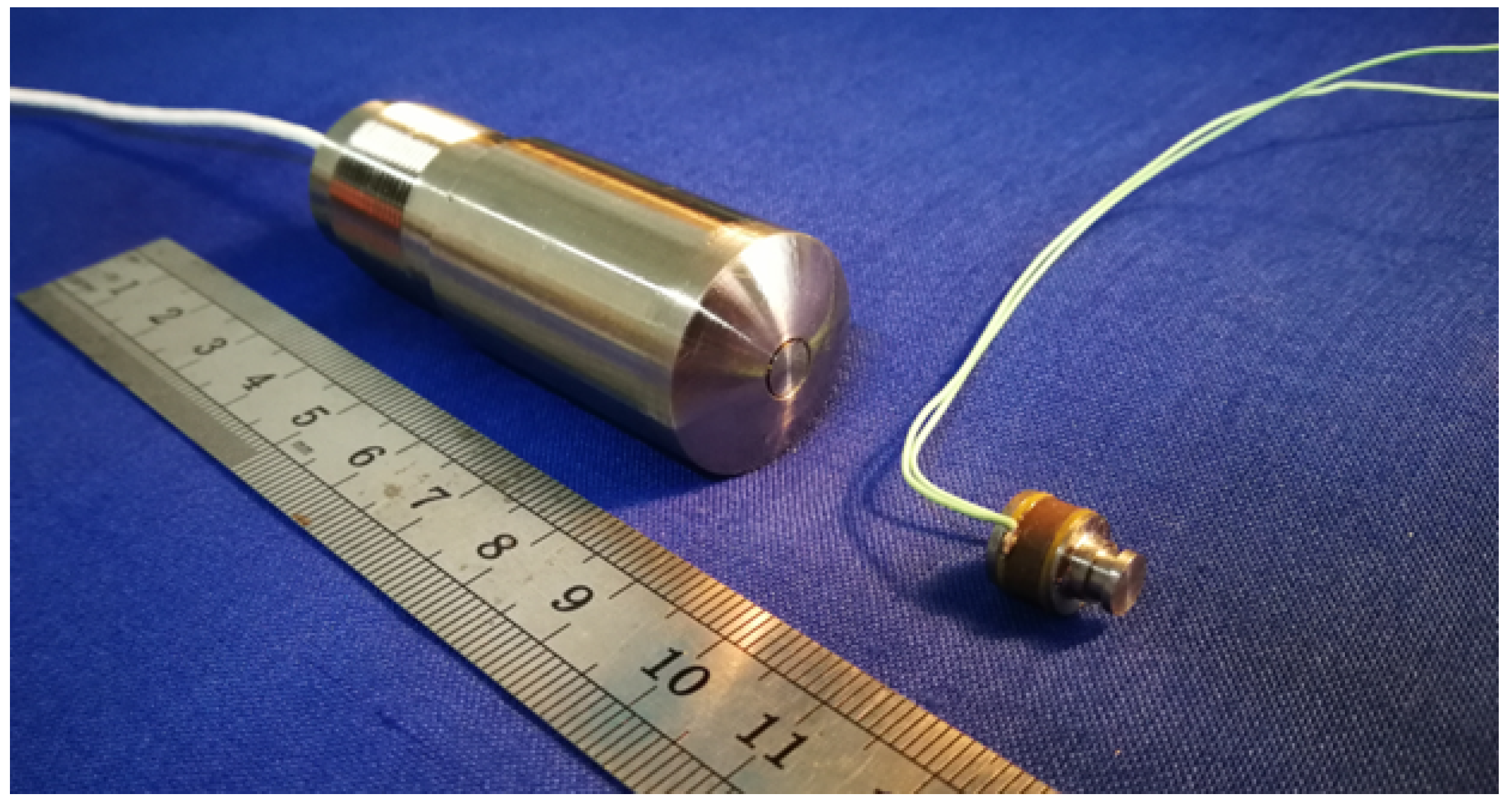
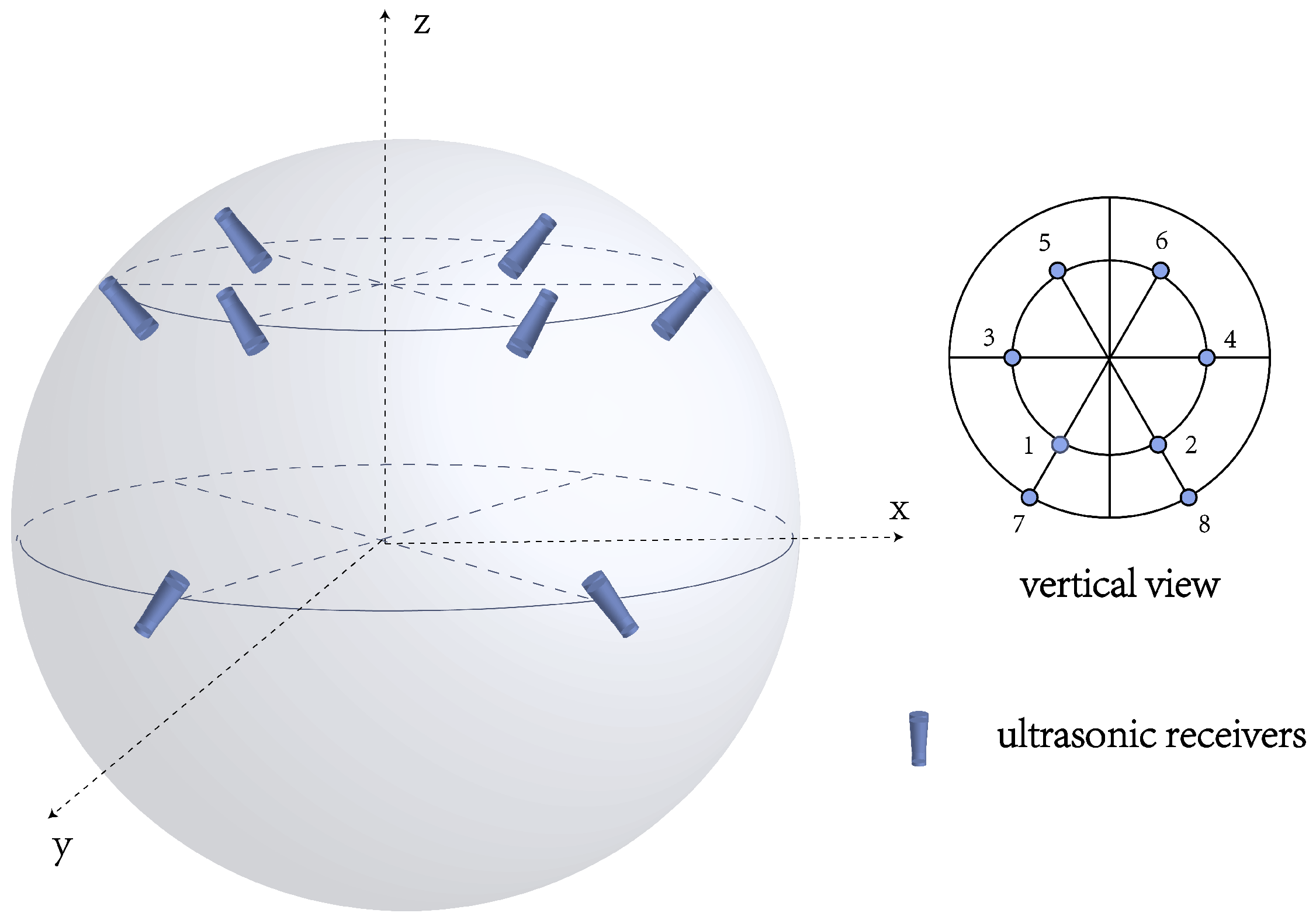
3.1. Design of Ultrasonic Receivers Array
3.2. Positioning Algorithm
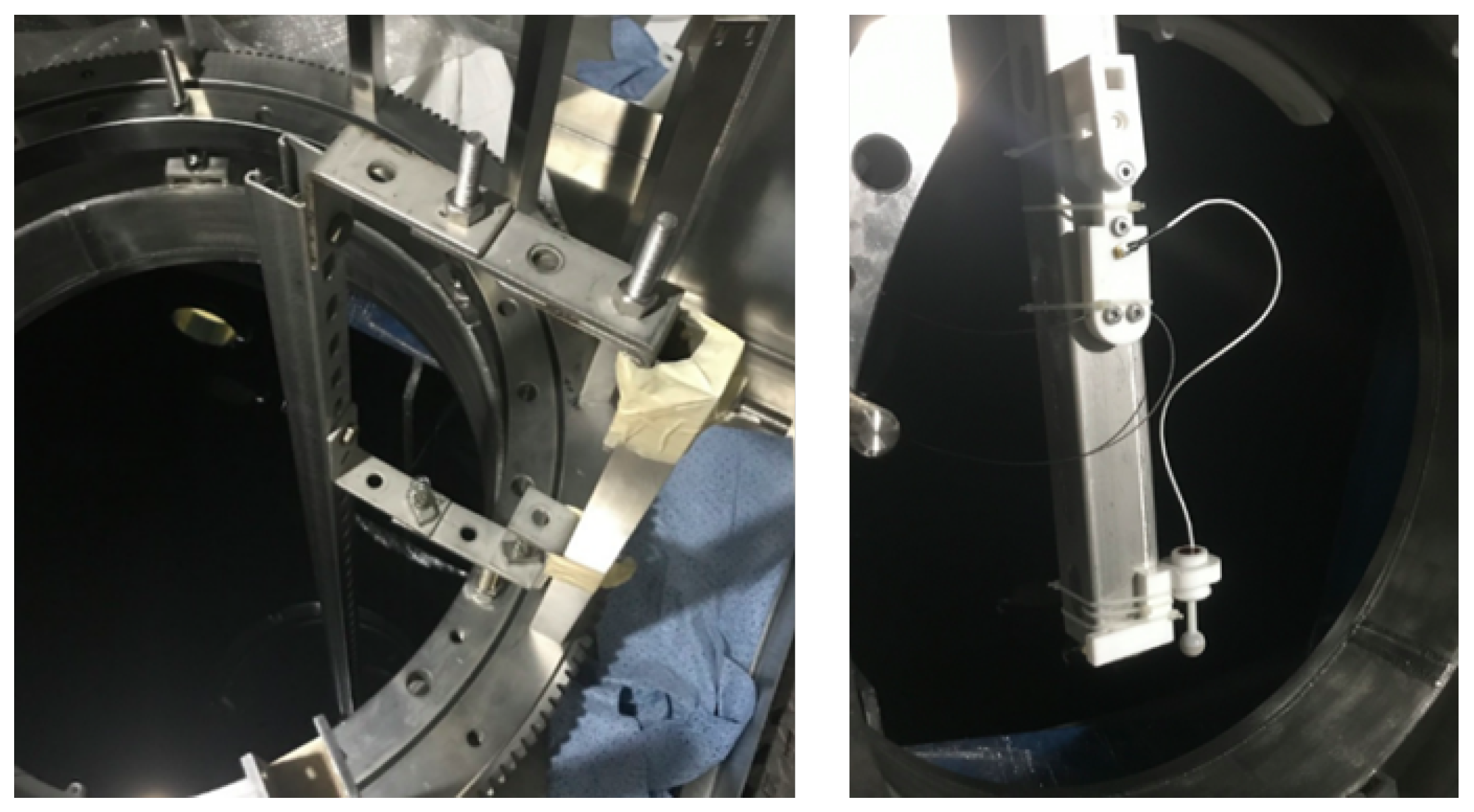
4. Test and Discussion
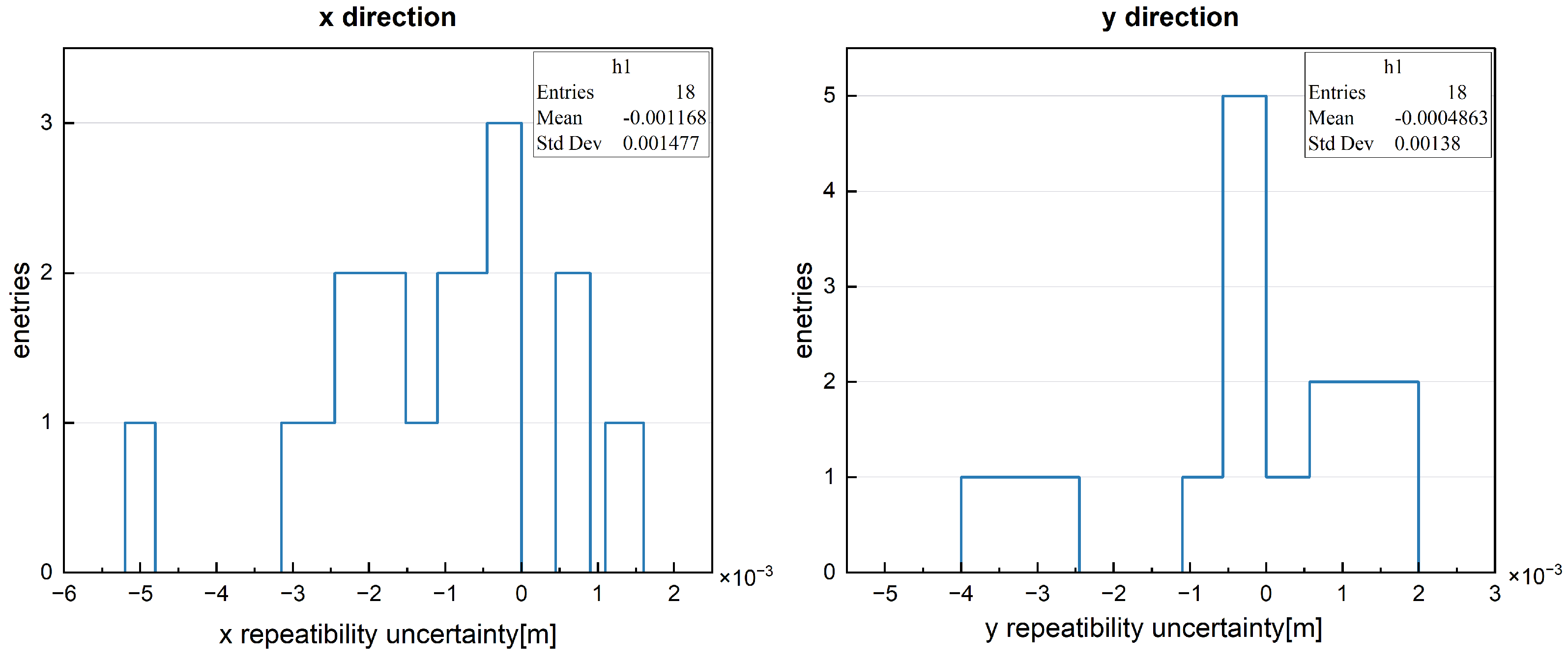
4.1. Positioning Consistency Experiment
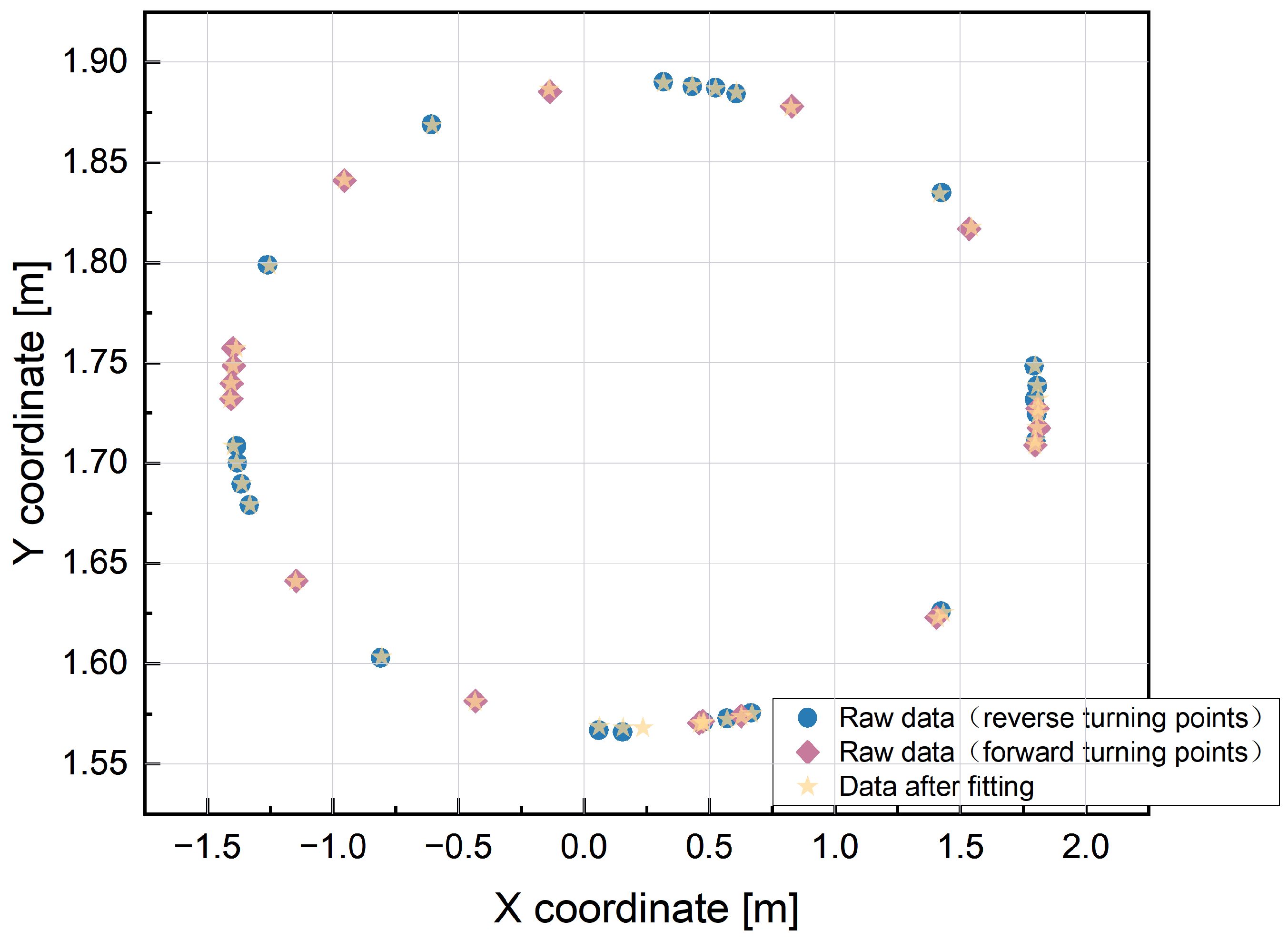
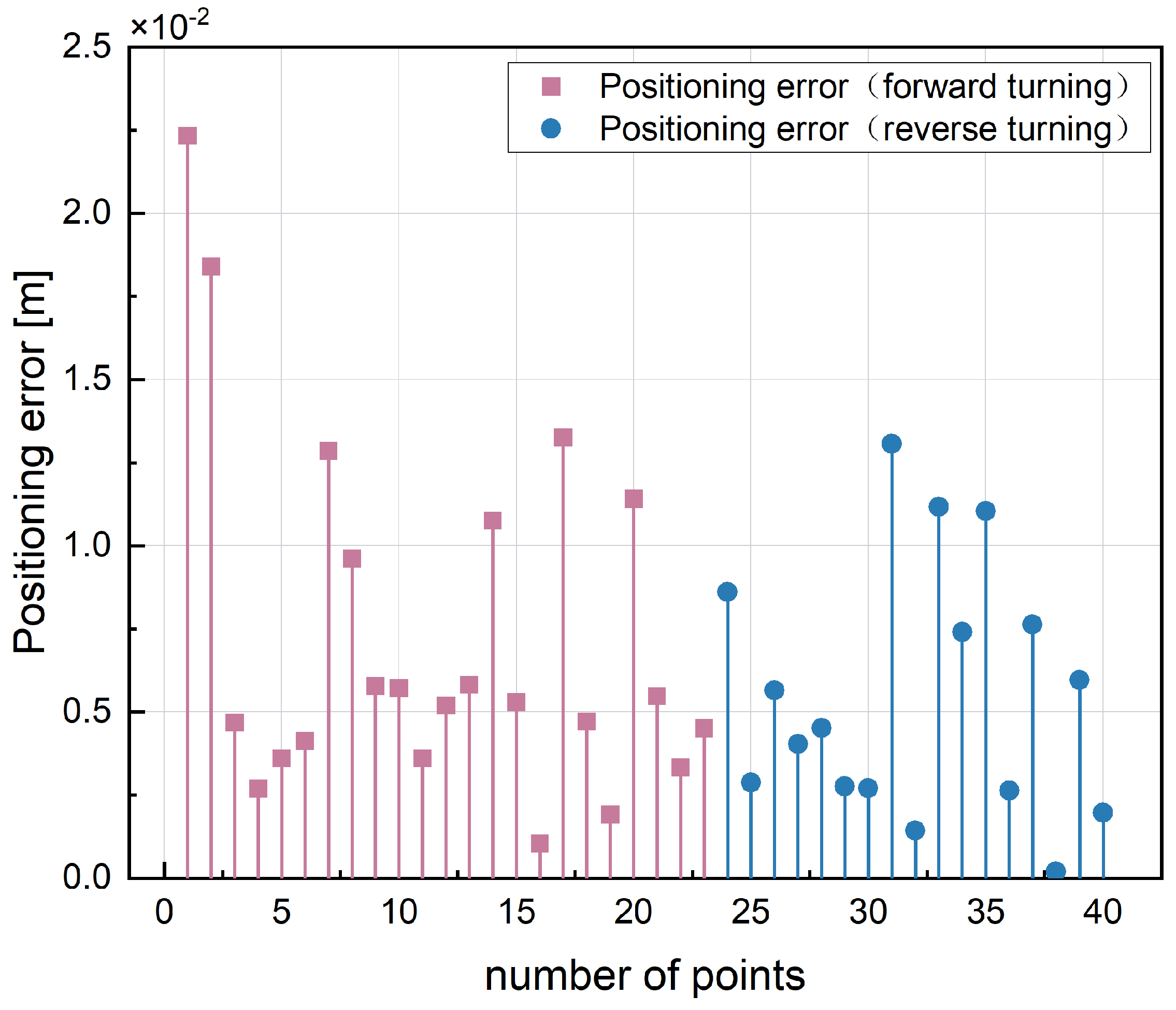
4.2. Positioning Accuracy Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| JUNO | Jiangmen Underground Neutrino Observatory |
| UPS | Ultrasonic positioning system |
| TOA | Time of arrival |
References
- An, F.; An, G.; An, Q.; Antonelli, V.; Baussan, E.; Beacom, J.; Bezrukov, L.; Blyth, S.; Brugnera, R.; Avanzini, M.B.; et al. Neutrino physics with JUNO. J. Phys. Nucl. Part. Phys. 2016, 43, 030401. [Google Scholar] [CrossRef]
- Ye, X.C.; Yu, B.X.; Zhou, X.; Zhao, L.; Ding, Y.Y.; Liu, M.C.; Ding, X.F.; Zhang, X.; Jie, Q.L.; Zhou, L.; et al. Preliminary study of light yield dependence on LAB liquid scintillator composition. Chin. Phys. C 2015, 39, 096003. [Google Scholar] [CrossRef]
- He, M.; JUNO Collaboration. Jiangmen underground neutrino observatory. Nucl. Part. Phys. Proc. 2015, 265, 111–113. [Google Scholar] [CrossRef]
- Wang, Z. JUNO central detector and its prototyping. J. Phys. Conf. Ser. 2016, 718, 062075. [Google Scholar] [CrossRef]
- Wang, J.; Anfimov, N.; Guo, J.Y.; Gu, Y.; Hu, H.; Li, M.; Ma, Q.M.; Olshevskiy, A.; Peng, Z.Y.; Qin, Z.H.; et al. Database system for managing 20,000 20-inch PMTs at JUNO. Nucl. Sci. Tech. 2022, 33, 24. [Google Scholar] [CrossRef]
- Zhu, G.L.; Liu, J.L.; Wang, Q.; Xiao, M.J.; Zhang, T. Ultrasonic positioning system for the calibration of central detector. Nucl. Sci. Tech. 2019, 30, 5. [Google Scholar] [CrossRef]
- Zhang, R.; Cao, D.W.; Loh, C.W.; Liu, Y.H.; Wu, F.L.; Zhang, J.L.; Qi, M. Using monochromatic light to measure attenuation length of liquid scintillator solvent LAB. Nucl. Sci. Tech. 2019, 30, 30. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Xiao, M.; Zhang, F.; Zhang, T. Laser calibration system in JUNO. J. Instrum. 2019, 14, P01009. [Google Scholar] [CrossRef]
- Zhang, Y.; Hui, J.; Liu, J.; Xiao, M.; Zhang, T.; Zhang, F.; Meng, Y.; Xu, D.; Ye, Z. Cable loop calibration system for Jiangmen underground neutrino observatory. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2021, 988, 164867. [Google Scholar] [CrossRef]
- Feng, K.; Li, D.; Shi, Y.; Qin, K.; Luo, K. A novel remotely operated vehicle as the calibration system in JUNO. J. Instrum. 2018, 13, T12001. [Google Scholar] [CrossRef]
- Teng, D.; Liu, J.L.; Zhu, G.L.; Meng, Y.; Zhang, Y.y.; Zhang, T.; Luo, K.; Li, R.; Hui, J.Q. Low-radioactivity ultrasonic hydrophone used in positioning system for Jiangmen Underground Neutrino Observatory. Nucl. Sci. Tech. 2022, 33, 76. [Google Scholar] [CrossRef]
- Patel, M.; Chitaliya, N.; Shukla, Y. Design and implementation of underwater positioning system using GPS surface node and acoustic signals. Int. J. Adv. Res. Eng. Sci. Technol. 2017, 4, 35–41. [Google Scholar]
- Zhang, J.; Han, Y.; Zheng, C.; Sun, D. Underwater target localization using long baseline positioning system. Appl. Acoust. 2016, 111, 129–134. [Google Scholar] [CrossRef]
- Tallini, I.; Iezzi, L.; Gjanci, P.; Petrioli, C.; Basagni, S. Localizing autonomous underwater vehicles: Experimental evaluation of a long baseline method. In Proceedings of the IEEE 2021 17th International Conference on Distributed Computing in Sensor Systems (DCOSS), Pafos, Cyprus, 14–16 July 2021; pp. 443–450. [Google Scholar]
- Tang, Z. Long baseline underwater acoustic location technology. In Encyclopedia of Ocean Engineering; Springer: Singapore, 2022; pp. 935–941. [Google Scholar]
- Cario, G.; Casavola, A.; Gagliardi, G.; Lupia, M.; Severino, U. Accurate localization in acoustic underwater localization systems. Sensors 2021, 21, 762. [Google Scholar] [CrossRef] [PubMed]
- Cui, P.; Jiang, K.; Lv, J.; Zhao, Z.; Yue, J.; Jiao, D. A Hydroacoustic Positioning Method Based on Analysis of the Error Region of Three-circle Intersection. In Proceedings of the IEEE 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 763–766. [Google Scholar]
- Chugunov, A.; Kulikov, R.; Pudlovskiy, V. Modeling a High-Precision Positioning Algorithm for Acoustic Positioning System. In Proceedings of the IEEE 2020 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russia, 6–9 October 2020; pp. 1–5. [Google Scholar]
- Ahmed, A.; Hamid, U.; Masud, A.; Waqas, M.; Ali, S. Simulation of ultra short baseline system for positioning of underwater vehicles. In Proceedings of the IEEE 2022 19th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 16–20 August 2022; pp. 944–950. [Google Scholar]
- Saeid, L. Underwater Source Localization based on Modal Propagation and Acoustic Signal Processing. Master’s Thesis, University of Windsor, Windsor, ON, Canada, 2021. [Google Scholar]
- Yang, T.; Zhao, J. Solution to long-range continuous and precise positioning in deep ocean for autonomous underwater vehicles using acoustic range estimation and inertial sensor measurements. J. Shanghai Jiaotong Univ. (Sci.) 2022, 27, 281–297. [Google Scholar] [CrossRef]
- Graça, P.A.A. Relative Acoustic Localization with USBL (Ultra-Short Baseline). Master’s Thesis, Faculty of Engineering—University of Porto, Porto, Portugal, 2020. [Google Scholar]
- Guo, H.; Li, L.; Zhang, S. Short baseline direct position determination based on precise synchronization. In Proceedings of the IET International Radar Conference (IET IRC 2020), Chongqing, China, 4–6 November 2020. [Google Scholar]
- Yoshihara, T.; Ebihara, T.; Mizutani, K.; Sato, Y. Underwater acoustic positioning in multipath environment using time-of-flight signal group and database matching. Jpn. J. Appl. Phys. 2022, 61, SG1075. [Google Scholar] [CrossRef]
- Yoshihara, T.; Ebihara, T.; Mizutani, K.; Sato, Y. Underwater Acoustic Positioning Using Time-of-flight Signal Blocks. In Proceedings of the Symposium on Ultrasonic Electronics, Online, 11–16 September 2021; Volume 42, pp. 2E3–E4. [Google Scholar]
- Zhang, Q.; Guo, Y.; Heng, Y.; Zhou, L.; Yu, B.; Liu, J.; Xiao, M.; Zhang, F. JUNO central detector and its calibration system. In Proceedings of the 38th International Conference on High Energy Physics, Venice, Italy, 5–12 July 2017; SISSA Medialab: Trieste, Italy, 2017; Volume 282, p. 967. [Google Scholar]
- Zhu, G.; Wang, Q.; Cheng, Q. Accurate ultrasonic positioning system for the Central Detector. In Proceedings of the IEEE OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–4. [Google Scholar]
- Hladky-Hennion, A.C.; Dubus, B. Finite element analysis of piezoelectric transducers. In Piezoelectric and Acoustic Materials for Transducer Applications; Springer: New York, NY, USA, 2008; pp. 241–258. [Google Scholar]
- Zhang, Y.; Wang, L.; Qin, L.; Zhong, C.; Hao, S. Spherical–omnidirectional piezoelectric composite transducer for high-frequency underwater acoustics. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 68, 1791–1796. [Google Scholar] [CrossRef] [PubMed]
- Teng, D.; Yang, H.; Zhu, G. Design and test about high sensitivity thin shell piezoelectric hollow sphere hydrophone. In Proceedings of the IEEE OCEANS 2017, Anchorage, AK, USA, 18–21 September 2017; pp. 1–6. [Google Scholar]
- Zhu, G.; Wang, Y.; Wang, Q. Research on Accurate Ultrasonic Positioning Error under the Special Environment. Xibei Gongye Daxue Xuebao/J. Northwestern Polytech. Univ. 2018, 36, 496–501. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, G.; Yang, W.; Teng, D.; Wang, Q.; Hui, J.; Lian, J. Experiments of Ultrasonic Positioning System with Symmetrical Array Used in Jiangmen Underground Neutrino Observatory. Symmetry 2024, 16, 1218. https://doi.org/10.3390/sym16091218
Zhu G, Yang W, Teng D, Wang Q, Hui J, Lian J. Experiments of Ultrasonic Positioning System with Symmetrical Array Used in Jiangmen Underground Neutrino Observatory. Symmetry. 2024; 16(9):1218. https://doi.org/10.3390/sym16091218
Chicago/Turabian StyleZhu, Guolei, Wenxin Yang, Duo Teng, Qi Wang, Jiaqi Hui, and Jie Lian. 2024. "Experiments of Ultrasonic Positioning System with Symmetrical Array Used in Jiangmen Underground Neutrino Observatory" Symmetry 16, no. 9: 1218. https://doi.org/10.3390/sym16091218
APA StyleZhu, G., Yang, W., Teng, D., Wang, Q., Hui, J., & Lian, J. (2024). Experiments of Ultrasonic Positioning System with Symmetrical Array Used in Jiangmen Underground Neutrino Observatory. Symmetry, 16(9), 1218. https://doi.org/10.3390/sym16091218