Abstract
In this work, we introduce a new inertial accelerated Mann algorithm for finding a point in the set of fixed points of asymptotically nonexpansive mapping in a real uniformly convex Banach space. We also establish weak and strong convergence theorems of the scheme. Finally, we give a numerical experiment to validate the performance of our algorithm and compare with some existing methods. Our results generalize and improve some recent results in the literature.
Keywords:
asymptotically nonexpansive; inertial-accelerated algorithm; fixed point; uniformly convex spaces MSC:
47H09; 47J25
1. Introduction
Let X be a real Banach space and C a nonempty closed and convex subset of X. Let be a mapping. A point is called a fixed point of T if . We denote by the set of all fixed points of T, that is, . Then, the mapping is said to be:
- (i)
- Nonexpansive if
- (ii)
- Asymptotically nonexpansive (see [1] ) if there exists a sequence , with such thatand
- (iii)
- Uniformly L-Lipschitzian if there exists a constant such that, for all ,
The class of asymptotically nonexpansive mappings was first introduced and studied by Goebel and Kirk [1] as a generalization of the class of nonexpansive mappings. They proved that if C is a nonempty closed convex and bounded subset of a real uniformly convex Banach space and T is an asymptotically nonexpansive mapping on C, then T has a fixed point.
Many problems in pure and applied sciences, like those related to the theory of differential equations, optimization, game theory, image recovery, and signal processing (see [2,3,4,5,6] and the references contained therein) can be formulated as fixed-point problems of nonexpansive mappings. Iterative methods for approximating fixed points of nonexpansive and asymptotically nonexpansive mappings using Mann and Ishikawa iterative processes have been studied by many authors. Mann and Ishikawa methods were first studied for nonexpansive mappings and later modified to study the convergence analysis of fixed points of asymptotically nonexpansive mappings; see for example [7,8,9,10,11] and references therein. In 1978, Bose [12] started the study of iterative methods for approximating fixed points of asymptotically nonexpansive mapping in a bounded closed convex nonempty subset C of a uniformly convex Banach space which satisfies Opial’s condition. Bose [12] proved that the sequence of asymptotically nonexpansive mapping converges weakly to the fixed point of asymptotically nonexpansive mapping T, provided T is asymptotically regular at ; that is, . Later, Schu [13,14] was the first to study the following modified Mann iteration process for approximating the fixed point of an asymptotically nonexpansive mapping T on nonempty closed convex and bounded subsets C of both Hilbert space and (resp.) uniformly convex Banach space with Opial’s condition. The modified Mann sequence generated with any arbitrary and for any control sequence in is as follows:
In 2000, Osilike and Aniagbosor [15] proved that the theorems of Schu [13,14] remain true without the boundedness condition imposed on C provided that the fixed-points set of asymptotically nonexpansive mapping is nonempty. Later, in 2015, Dong and Yuan [16] studied the accelerated convergence rate of Mann’s iterative method [9] by combining Picard’s method [10] with the conjugate gradient methods [17]. Consequently, they obtained the following fast algorithm for nonexpansive mapping in Hilbert space:
where , , and and are real nonnegative sequences. They proved weak convergence of the sequence in (2) under the following conditions:
- (C1)
- .
- (C2)
- .
- (C3)
- is bounded.
Finally, they provided some numerical examples to validate that the accelerated Mann algorithm (2) is more efficient than the Mann algorithm.
On the other hand, in the light of inertial-type iterative methods which are based upon a discrete version of a second-order dissipative dynamical system [18,19,20], it has been proved that the procedure improves the performance and increases the rate of convergence of the iterative sequence (see [21,22,23,24,25,26] and the references therein). In [22], Dong et al. proposed the following modified inertial Mann algorithm for nonexpansive mappings for Hilbert space, by combining the accelerated Mann algorithm (2) and an inertial-type extrapolation method. Consequently, they studied the following accelerated Mann algorithm:
where is nonincreasing with and , satisfies
and
where Under the assumption that the sequence satisfies:
- (D1) is bounded; and
- (D2) is bounded for any
They proved that converges weakly to a point in .
Inspired and motivated by the above results, it is our purpose in this paper to extend and generalize the result of Dong et al. [22] from nonexpansive mapping to asymptotically nonexpansive mapping in the setting of real uniformly convex Banach space, which is more general than Hilbert space. We use an inertial parameter which is different from the one in [22]. Finally, we give some numerical examples to validate the convergence of our algorithm.
2. Preliminaries
We use the following notations:
- (i)
- for weak convergence and → for strong convergence.
- (ii)
- to denote the set of w-weak cluster limits of .
Definition 1.
A normed linear space X is said to be a uniformly convex Banach space if for any there exists a such that for any with , and , then, .
Remark 1.
We oberve from Definition 1 that every Hilbert space is a uniformly convex Banach space.
Definition 2.
Let X be a Banach space and be its dual space. A mapping associated with a gauge function φ defined by
is called the generalized duality mapping where φ is defined by for all and . In particular, if , is known as the normalized duality map written as J, which is defined by
The space X is said to have a weakly sequentially continuous duality map if is single-valued and sequentially continuous from X with weak topology to with weak topology.
Definition 3
(Browder, [27]). The duality mapping J is said to be weakly sequentially continuous if for any sequence in E such that , implies , where means weak convergence.
Definition 4.
- (1)
- Demiclosed at , if for any sequence in C which converges weakly to and , it holds that .
- (2)
- Semicompact, if for any bounded sequence in C such that there exists a subsequence such that .
The following lemmas will be needed in the proof of the main results.
Lemma 1
(see [28] Opial’s property). If in a Banach space X having a weakly continuous duality mapping J, the sequence is weakly convergent to , then for any :
In particular, if the space X is uniformly convex, then equality holds if and only if .
It is known that in every Hilbert space and space, satisfies!Opial’s condition. However with does not satisfy this condition; (see [29] for more details). Additionally, it is clear in [30] that every Banach space with weakly sequentially continuous duality mapping satisfies Opial’s condition. An example of a space with a weakly sequentially continuous duality map is space.
Lemma 2
(see [11]). Let X be a real uniformly convex Banach space, let C be a nonempty closed convex subset of X, and an asymptotically nonexpansive mapping with a sequence and . Then, the mapping is demiclosed at zero.
Lemma 3
(see [15] Lemma 1). Let , , and be nonnegative sequences such that
with and . Then
- (i)
- The sequence converges.
- (ii)
- In particular, if , then .
Lemma 4
(see [31]). Let be a fixed number. Then, a real Banach space X is uniformly convex if and only if there exists a continuous and strictly increasing function with , such that;
for all in and .
3. Main Results
In this section, we prove weak and strong convergence theorems for asymptotically nonexpansive mapping in real uniformly convex Banach space.
Weak Convergence Theorem
Assumption 1.
Let X be a real uniformly convex Banach space.
- (i)
- Choose sequences , and with which means .
- (ii)
- Let be arbitrary points, for the iterates and for each , choose such that where, for anyThis idea was obtained from the recent inertial extrapolation step introduced in [32].
Remark 2.
It is easy to see from Assumption 1 that for each , we have
which together with and , we respectively obtain
and
Theorem 1.
Let X be a real uniformly convex Banach space with Opial’s property. Let be an asymptotically nonexpansive mapping with sequence such that and . Let be the sequence generated as follows:
where , , assuming that Assumption 1 holds and set . Then, the sequence converges weakly to a point , provided that the following conditions hold:
(C1) .
(C2) .
Moreover, satisfies
(C3) is bounded.
Proof.
We divide the proof into the following steps:
Step (i): We show that is bounded.
We have from (C1) that ; thus, there exists such that for all . Let be defined as follows:
Then, by (C3), we have . Assume that for some , then
This implies that
and consequently is bounded.
Step (ii): We show that exists for any .
From the scheme (7), we have
By (8), (9), and for any , we have
Additionally,
Combining (10) and (11), we obtain
By (6) in Remark 2, we know that the sequence converges, and since , then it converges, so there exists some constant say such that for all
thus
Now, using (10), (12), and for some , any , we have
Therefore,
Hence, using the fact that , together with condition (C1) and Lemma 3 in (13), we get that exists. Consequently, the sequence is bounded.
Step (iii): Next we show that
Since the sequence is bounded, it follows that is bounded and consequently is bounded. Let . Then, for any and since X is a uniformly convex Banach space, by Lemma 4, there exists a continuous and strictly increasing function with such that
for all in and .
Therefore,
Since exists for any , then using (5) it follows from (11) that there exists such that for any , and using (8), we have
Since exists for any , then is bounded; therefore, there exists such that for all . Hence,
Therefore,
Hence,
Using (C1), (5), and , we obtain
which implies that
By (C2), we have
Using the property of g, we have
Now,
Taking the sum over n of both sides and considering (5), we have
which implies that
Since T is asymptotically nonexpansive, we obtain
Using (14) and (15) in (16), we have
On the other hand,
Using (14) and (C1), we have
Similarly, using (8), we have
It follows from (14), (18), and (C1) that
Thus,
From (17) and (20), we have
This completes the proof of (iii).
Since is bounded and X is a reflexive Banach space, there exists a subsequence of which converges weakly to a point where . Therefore, from (21), it follows that and consequently by Lemma 2 we have . Therefore, we obtain that .
Now, to prove that the sequence converges weakly to a fixed point of T, it suffices to show that is a singleton. To do that, we proceed as follows.
By our assumption that X satisfies Opial’s property, using Lemma 1, taking and let and be subsequences of such that and . Then for , we have
This is a contradiction, showing that is a singleton. This completes the proof. □
Now we prove strong convergence theorem.
Theorem 2.
If in addition to all the hypotheses of Theorem 1, the map T is semicompact, then the iterative sequence generated by (7) converges strongly to a fixed point of T.
Proof.
Assume that T is semicompact. Since from step (ii) and step (iii) in the proof of Theorem 1, we know that the sequence is bounded and , then there exists a subsequence of such that as . Therefore and so . From step (ii) in the proof of Theorem 1, exists, then
which means that . This completes the proof. □
If in Theorem 1 we assume that T is nonexpansive, we obtain the following corollary.
Corollary 1.
Let X be a real uniformly convex Banach space with Opial’s property and be nonexpansive mapping with . Let be the sequence generated as follows:
where , , assuming that Assumption 1 holds, and set . Then, the sequence converges weakly to a point , provided that the following conditions hold:
(C1) .
(C2) .
Moreover, satisfies
(C3) is bounded.
If in Theorem 1 we assume that X is a real Hilbert space, we get the following corollary.
Corollary 2.
Let H be a real Hilbert space. Let be an asymptotically nonexpansive mapping with sequence such that and . Let be the sequence generated as follows:
where , , assuming that Assumption 1 holds and set . Then, the sequence converges weakly to a point , provided that the following conditions hold:
(C1) .
(C2) .
Moreover, satisfies
(C3) is bounded.
If in Corollary 2 we assume that T is nonexpansive, we obtain the following Corollary.
Corollary 3.
Let H be a real Hilbert space and be nonexpansive mapping with . Let be the sequence generated as follows
where , , assuming the Assumption 1 holds and set . Then, the sequence converges weakly to a point , provided that the following conditions hold;
(C1) .
(C2) .
Moreover, satisfies
(C3) is bounded.
Remark 3.
Our results extend and generalize many results in the literature for this important class of nonlinear mappings. In particular, Theorem 1 extends Theorem 3.1 of Dong et al. [22] to a more general class of asymptotically nonexpansive mappings in the setting of a real uniformly convex Banach space, more general than a real Hilbert space.
4. Numerical Examples
In this section, we present a numerical example to illustrate the behavior of the sequences generated by the iterative scheme (7). The numerical implementation is done with the aid of MATLAB 2019b programming on a PC with Processor AMD Ryzen 53500 U, 2.10 GHz, 8.00 GB RAM.
Example 1.

Let where
with
The duality mapping with respect to is defined by (see [33])
More so, X is not a real Hilbert space. Let be defined by We take Then, all the conditions of Theorem 1 are satisfied with Then, from (7) we get
where We compare the performance of (25) with the methods of Pan and Wang [34] and Vaish and Ahmad [35], which are given respectively by
and
where and are sequences in such that , , is a Meir–Keeler contraction mapping and is a contraction mapping with coefficient In our computation, we take , and We test the iterative methods for the following initial points:
- Case I:
- and
- Case II:
- and
- Case III:
- and
- Case IV:
- and
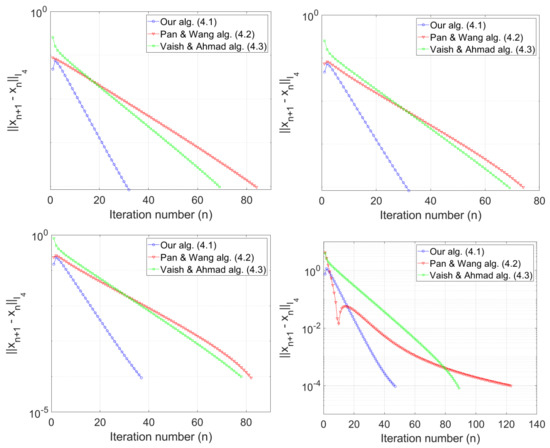
We used as the stopping criterion for all the algorithms. The numerical results are shown in Table 1 and Figure 1.
Table 1.
Computational results showing the performance of the algorithms.
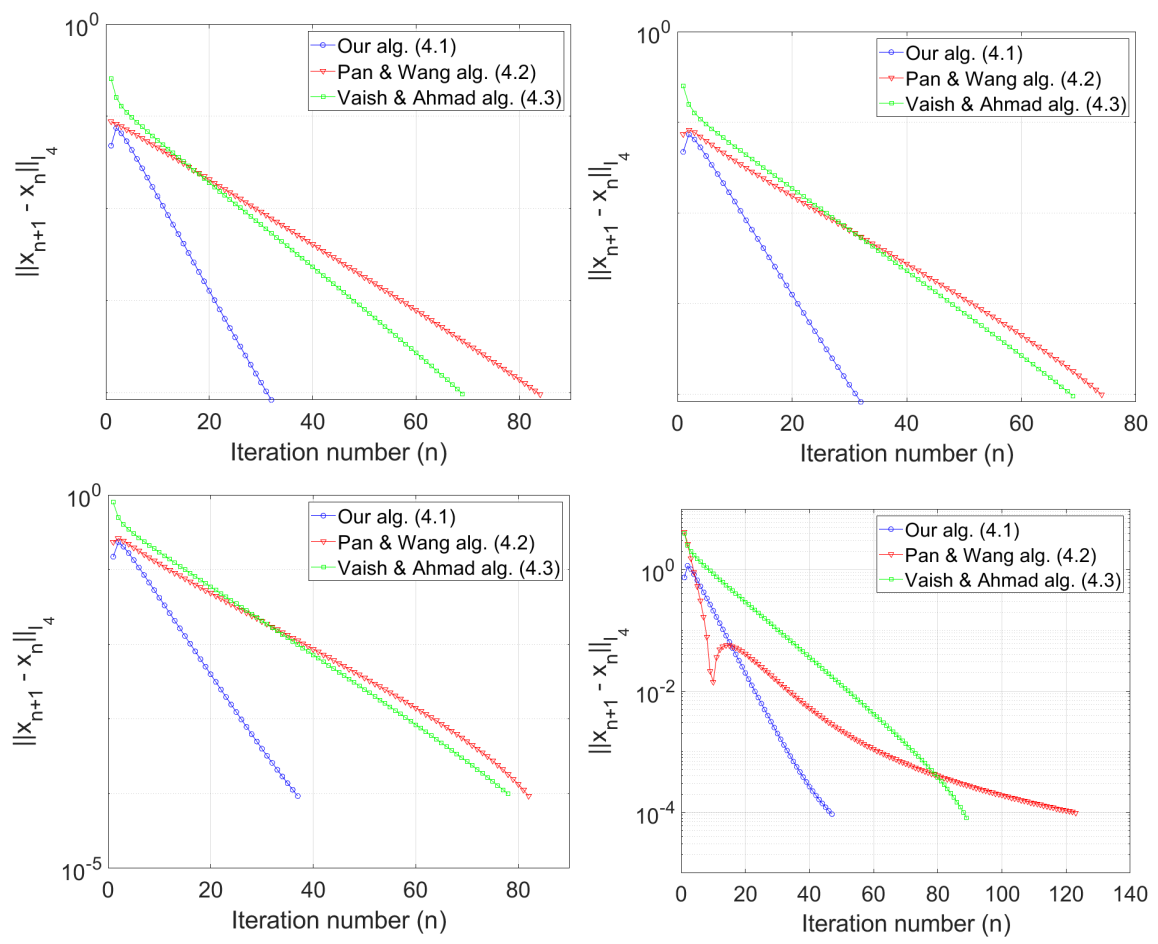
Figure 1.
Example 1. Top left: Case I; top right: Case II; bottom left: Case III; bottom right: Case IV.
Example 2.
Let , endowed with the inner product and the norm for all , . Define as follows:
Then, clearly and for all , it is easy to see that
In general, for any we have
So
This implies that T is an asymptotically nonexpansive mapping with as . Similarly, we compare the performance of (7) with that of Pan and Wang [34] and Vaish and Ahmad [35]. For (7), we choose . For the Pan and Wang algorithm, we take For the Vaish and Ahmad algorithm, we take We test the algorithm using the following initial points:
- Case I:
- Case II:
- Case III:
- Case IV:
Table 2.
Computational results showing the performance of the algorithms for Example 2.
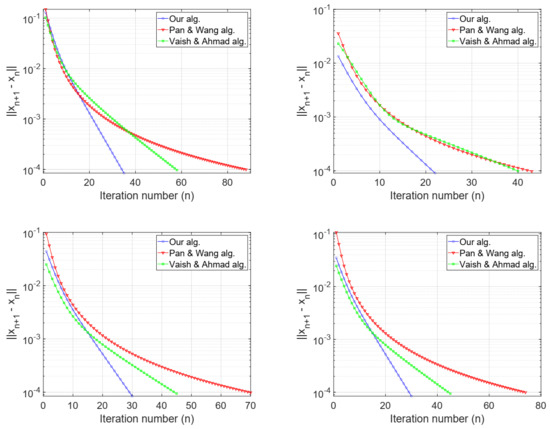
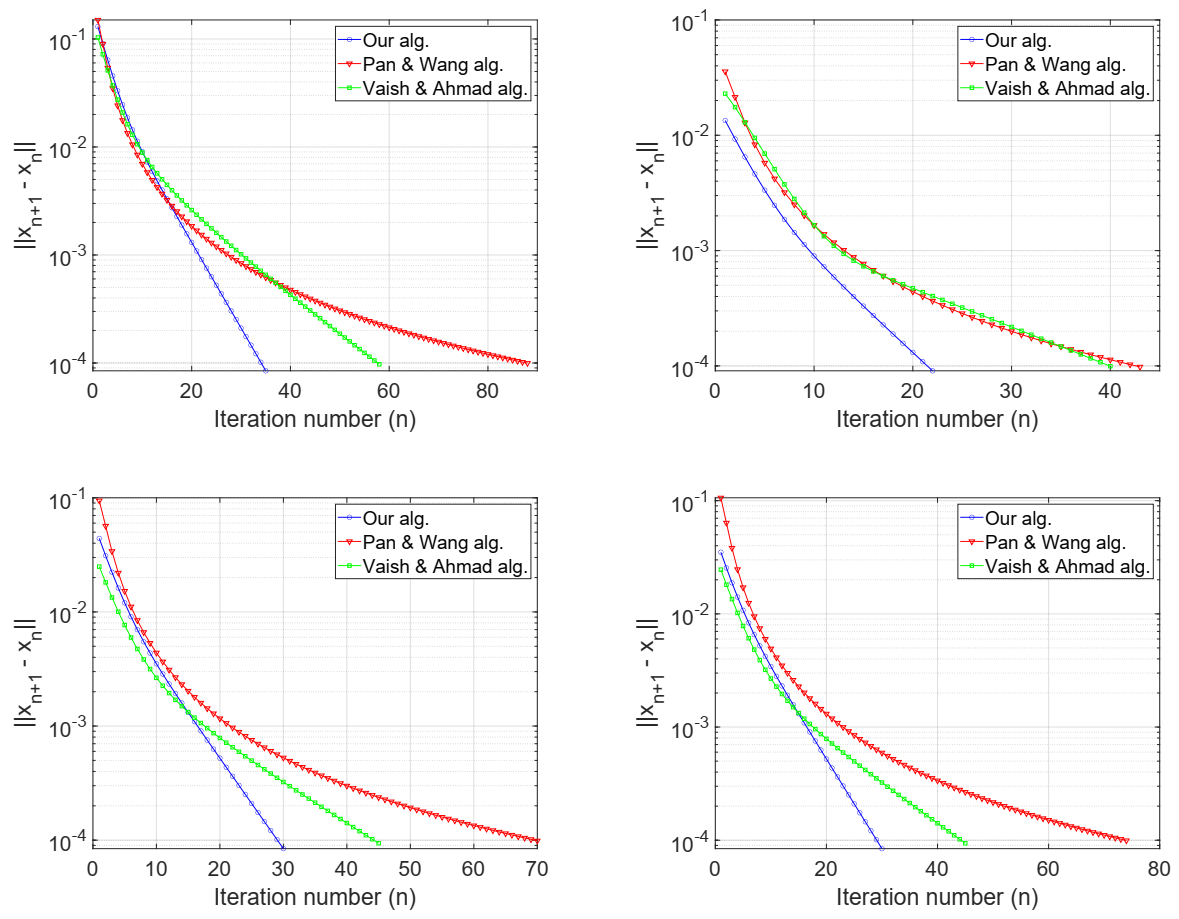
Figure 2.
Example 2. Top left: Case I; top right: Case II; bottom left: Case III; bottom right: Case IV.
Example 3.
Finally, we apply our algorithm to solve an image restoration problem which involves the reconstruction of an image degraded by blur and additive noise. We solve the -norm regularization problem, that is, find a solution to the following continuous optimization problem:
where b is a vector in A is a matrix of dimension (), and is the -norm of The expression in (28) can be reformulated as the following least absolute selection and shrinkage operator (LASSO) problem [36,37]:
where is a balancing parameter. Clearly, (29) is a convex unconstrained minimization problem which appears in compress sensing and image reconstruction, where the original signal (or image) is sparse in some orthogonal basis by the process
where x is the original signal (or image), A is the blurring operator, η is a noise, and b is the degraded or blurred data which needs to be recovered. Many iterative methods have been proposed for solving (29), with the earliest being the projection method by Figureido et al. [36]. Note that the LASSO problem (29) can be expressed as a variational inequality problem, that is, finding such that for all , where (see [38]). Equivalently, we can rewrite (29) as a fixed point problem with (for ) which is nonexpansive. Our aim here is to recover the original image x given the data of the blurred image b. We consider the greyscale image of M pixels width and N pixels height, where each value is known to be in the range . Let The quality of the restored image is measured by the signal-to-noise ratio defined as
where x is the original image and is the restored image. Typically, the larger the , the better the quality of the restored image. In our experiments, we use the greyscale test images Cameraman () and Pout () in the Image Processing Toolbox in MATLAB, and each test image is degraded by a Gaussian blur kernel with standard deviation For our iterative scheme (7), we choose while for the Pan and Wang algorithm [34] and the Vaish and Ahmad algorithm [35] we take The initial values are chosen by Figure 3 and Figure 4 shows the original, blurred, and restored images using the algorithms. Figure 5 shows the graphs of SNR against number of iterations for each algorithm, and in Table 3 we report the time (in seconds) for each algorithm in the experiments.
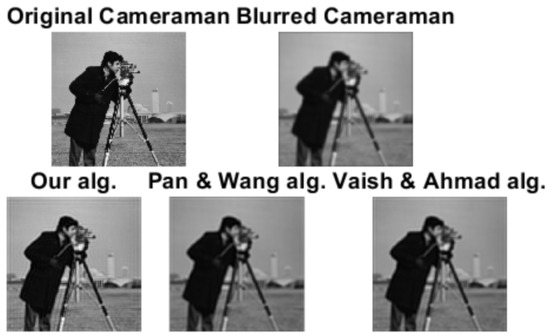
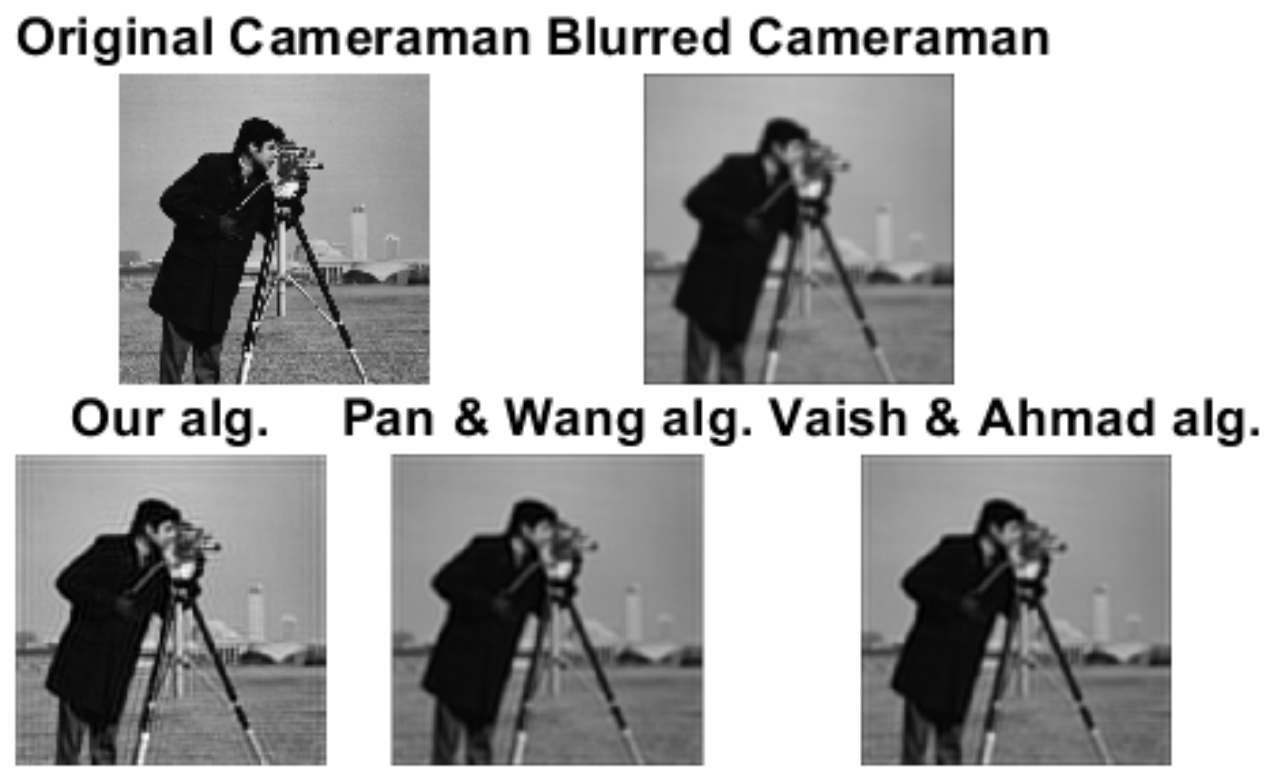
Figure 3.
Example 2. The top row shows the original Cameraman image (left) and the degraded Cameraman image (right). The bottom row shows the images recovered by our algorithm, by the algorithm of Pan and Wang, and by that of Vaish and Ahmad.
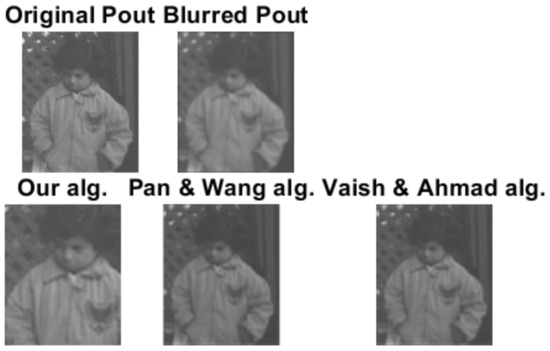
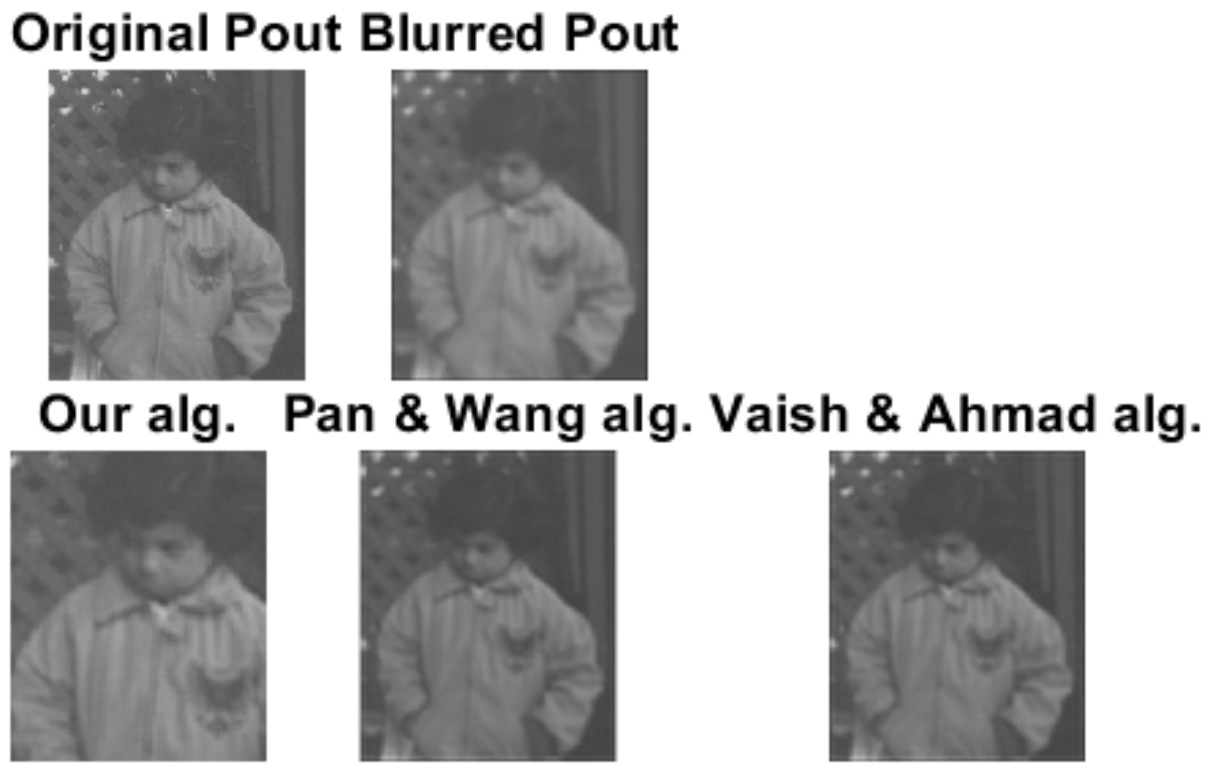
Figure 4.
Example 2. The top row shows the original Pout image (left) and the degraded Pout image (right). The bottom row shows the images recovered by our algorithm, by that of Pan and Wang, and by that of Vaish and Ahmad.
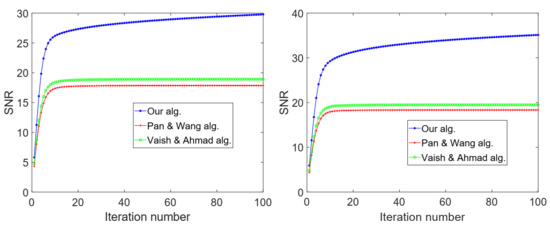
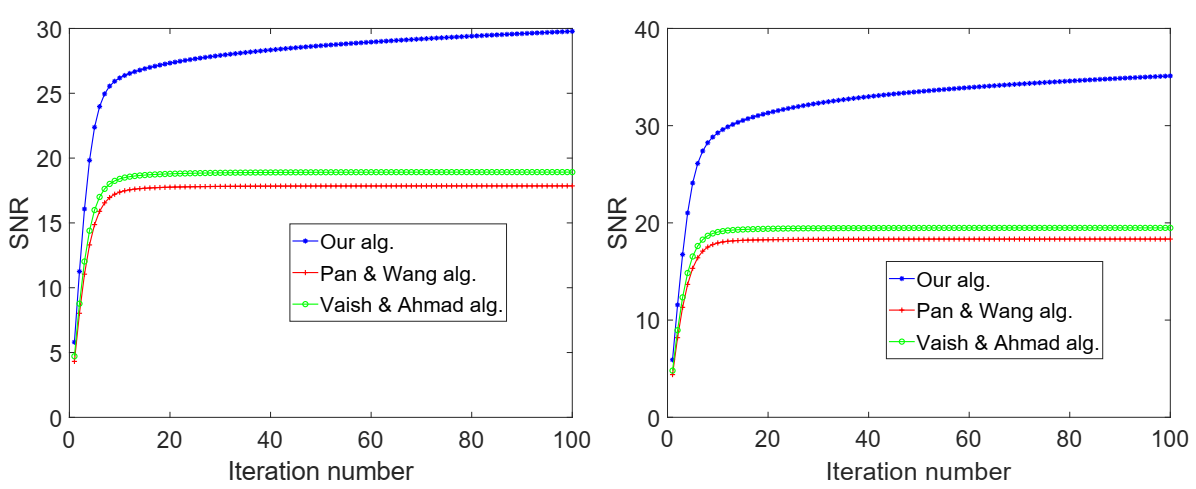
Figure 5.
Example 2: Graphs of signal-to-noise ratio (SNR) values against the number of iterations for Cameraman (left)and Pout (right).
Table 3.
Time (s) for restoring the images for each algorithm.
From the numerical results, we observe that all the algorithms are able to restore the degraded images. Algorithm (7) performs better than the other algorithms in terms of the SNR (quality) of the restored image, but with more time taken.
5. Conclusions
We studied a modified inertial accelerated Mann algorithm in real uniformly convex Banach spaces. A strong convergence theorem was proved for approximating a fixed point of asymptotically nonexpansive mapping. Finally, we applied our results to study an image restoration problem and presented some numerical experiments to demonstrate and clarify the efficiency of our proposed iterative method compared to some existing methods in the literature.
Author Contributions
All the authors (M.H.H., G.C.U., L.O.J. and A.A.) contributed equally in the development of this work. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Sefako Makgatho Health Sciences University Postdoctoral research fund and the APC was funded by Department of Mathematics and Applied Mathematics, Sefako Makgatho Health Sciences University, Pretoria, South Africa.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Goebel, K.; Kirk, W.A. A fixed point theorem for asymptotically nonexpansive mappings. Proc. Am. Math. Soc. 1972, 35, 171–174. [Google Scholar] [CrossRef]
- Ali, B.; Harbau, M.H. Covergence theorems for pseudomonotone equilibrium problems, split feasibility problems and multivalued strictly pseudocontractive mappings. Numer. Funct. Anal. Opt. 2019, 40. [Google Scholar] [CrossRef]
- Castella, M.; Pesquet, J.-C.; Marmin, A. Rational optimization for nonlinear reconstruction with approximate penalization. IEEE Trans. Signal Process. 2019, 67, 1407–1417. [Google Scholar] [CrossRef]
- Combettes, P.L.; Eckstein, J. Asynchronous block-iterative primal-dual decomposition methods for monotone inclusions. Math. Program. 2018, B168, 645–672. [Google Scholar] [CrossRef] [Green Version]
- Noor, M.A. New approximation Schemes for General Variational Inequalities. J. Math. Anal. Appl. 2000, 251, 217–229. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.K. A variable Krasnosel’skii-Mann algorithm and the multiple-set split feasibility problem. Inverse Probl. 2006, 22, 2021–2034. [Google Scholar] [CrossRef]
- Cai, G.; Shehu, Y.; Iyiola, O.S. Iterative algorithms for solving variational inequalities and fixed point problems for asymptotically nonexpansive mappings in Banach spaces. Numer. Algorithms 2016, 73, 869–906. [Google Scholar] [CrossRef]
- Halpern, B. Fixed points of nonexpansive maps. Bull. Am. Math. Soc. 1967, 73, 957–961. [Google Scholar] [CrossRef] [Green Version]
- Mann, W.R. Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4, 506–510. [Google Scholar] [CrossRef]
- Picard, E. Mémoire sur la théorie des équations aux dérivées partielles et la méthode des approximations successives. J. Math. Pures Appl. 1890, 6, 145–210. [Google Scholar]
- Tan, K.K.; Xu, H.K. Fixed Point Iteration Proccesses for Asymtotically Nonnexpansive Mappings. Proc. Am. Math. Soc. 1994, 122, 733–739. [Google Scholar] [CrossRef]
- Bose, S.C. Weak convergence to the fixed point of an asymptotically nonexpansive map. Proc. Am. Math. Soc. 1978, 68, 305–308. [Google Scholar] [CrossRef]
- Schu, J. Weak and strong convergence to fixed points of asymptotically nonexpansive mappings. Bull. Aust. Math. Soc. 1991, 43, 153–159. [Google Scholar] [CrossRef] [Green Version]
- Schu, J. Iterative construction of fixed points of asymptotically nonexpansive mappings. J. Math. Anal. Appl. 1991, 158, 407–413. [Google Scholar] [CrossRef] [Green Version]
- Osilike, M.O.; Aniagbosor, S.C. Weak and Strong Convergence Theorems for Fixed Points of Asymtotically Nonexpansive Mappings. Math. Comput. Model. 2000, 32, 1181–1191. [Google Scholar] [CrossRef]
- Dong, Q.L.; Yuan, H.B. Accelerated Mann and CQ algorithms for finding a fixed point of a nonexpansive mapping. Fixed Point Theory Appl. 2015, 125. [Google Scholar] [CrossRef] [Green Version]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer Series in Operations Research and Financial Engineering; Springer: Berlin, Germany, 2006. [Google Scholar]
- Attouch, H.; Peypouquet, J.; Redont, P. A dynamical approach to an inertial forward–backward algorithm for convex minimization. SIAM J. Optim. 2014, 24, 232–256. [Google Scholar] [CrossRef]
- Attouch, H.; Goudon, X.; Redont, P. The heavy ball with friction. I. The continuous dynamical system. Commun. Contemp. Math. 2000, 2, 1–34. [Google Scholar] [CrossRef]
- Attouch, H.; Peypouquent, J. The rate of convergence of Nesterov’s accelarated forward-backward method is actually faster than . SIAM J. Optim. 2016, 26, 1824–1834. [Google Scholar] [CrossRef]
- Bot, R.I.; Csetnek, E.R.; Hendrich, C. Inertial Douglas-Rachford splitting for monotone inclusion problems. Appl. Math. Comput. 2015, 256, 472–487. [Google Scholar] [CrossRef] [Green Version]
- Dong, Q.L.; Yuan, H.B.; Je, C.Y.; Rassias, T.M. Modified inertial Mann algorithm and inertial CQ-algorithm for nonexpansive mappings. Optim. Lett. 2016, 12, 87–102. [Google Scholar] [CrossRef]
- Dong, Q.L.; Kazmi, K.R.; Ali, R.; Li, H.X. Inertial Krasnol’skii-Mann type hybrid algorithms for solving hierarchical fixed point problems. J. Fixed Point Theory Appl. 2019, 21, 57. [Google Scholar] [CrossRef]
- Lorenz, D.A.; Pock, T. An inertial forward-backward algorithm for monotone inclusions. J. Math. Imaging Vis. 2015, 51, 311–325. [Google Scholar] [CrossRef] [Green Version]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Shehu, Y.; Gibali, A. Inertial Krasnol’skii-Mann method in Banach spaces. Mathematics 2020, 8, 638. [Google Scholar] [CrossRef] [Green Version]
- Browder, F.E. Convergence theorems for sequence of nonlinear mappings in Hilbert spaces. Math. Z. 1967, 100, 201–225. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73, 591–597. [Google Scholar] [CrossRef] [Green Version]
- Browder, F.E. Fixed point theorems for nonlinear semicontractive mappings in Banach spaces. Arch. Ration. Mech. Anal. 1966, 21, 259–269. [Google Scholar] [CrossRef]
- Gossez, J.-P.; Dozo, E.L. Some geometric properties related to the fixed point theory for nonexpansive mappings. Pac. J. Math. 1972, 40, 565–573. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.K. Inequalities in Banach Spaces with Applications. Nonlinear Anal. 1991, 16, 1127–1138. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage thresholding algorithm for linear inverse problem. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, R.P.; Regan, D.O.; Sahu, D.R. Fixed Point Theory for Lipschitzian-Type Mappings with Applications; Springer: Berlin, Germany, 2009. [Google Scholar]
- Pan, C.; Wang, Y. Generalized viscosity implicit iterative process for asymptotically non-expansive mappings in Banach spaces. Mathematics 2019, 7, 379. [Google Scholar] [CrossRef] [Green Version]
- Vaish, R.; Ahmad, M.K. Generalized viscosity implicit schemewith Meir-Keeler contraction for asymptotically nonexpansive mapping in Banach spaces. Numer. Algorithms 2020, 84, 1217–1237. [Google Scholar] [CrossRef]
- Figueiredo, M.A.T.; Nowak, R.D.; Wright, S.J. Gradient projection for sparse reconstruction: Application to compressed sensing and other inverse problems. IEEE J. Sel. Top. Signal Process. 2007, 1, 586–597. [Google Scholar] [CrossRef] [Green Version]
- Shehu, Y.; Vuong, P.T.; Cholamjiak, P. A self-adaptive projection method with an inertial technique for split feasibility problems in Banach spaces with applications to image restoration problems. J. Fixed Point Theory Appl. 2019, 21, 1–24. [Google Scholar] [CrossRef]
- Shehu, Y.; Iyiola, O.S.; Ogbuisi, F.U. Iterative method with inertial terms for nonexpansive mappings, Applications to compressed sensing. Numer. Algorithms 2020, 83, 1321–1347. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).