Abstract
In this article, we study the maximum number of limit cycles of discontinuous piecewise differential systems, formed by two Hamiltonians systems separated by a straight line. We consider three cases, when both Hamiltonians systems in each side of the discontinuity line have simultaneously degree one, two or three. We obtain that in these three cases, this maximum number is zero, one and three, respectively. Moreover, we prove that there are discontinuous piecewise differential systems realizing these maximum number of limit cycles. Note that we have solved the extension of the 16th Hilbert problem about the maximum number of limit cycles that these three classes of discontinuous piecewise differential systems separated by one straight line and formed by two Hamiltonian systems with a degree either one, two, or three, which such systems can exhibit.
MSC:
34C05; 37G15
1. Introduction and Statement of the Main Results
Discontinuous dynamical systems find pervasive applications across various domains, from electrical circuits and mechanical systems to biological processes, see [1,2,3]. These systems frequently exhibit abrupt changes, discontinuities, or switching phenomena, leading to sudden state transitions or impacts. For further insights, one may refer to the comprehensive works of Simpson [4], di Bernardo et al. [5], and the survey by Makarenkov and Lamb [6]. The Filippov convention stands out as a robust framework for modeling and analyzing such systems, providing a nuanced understanding of their dynamics.
The identification of a periodic orbit isolated within the set of all periodic orbits of a system is termed a “limit cycle”. Understanding the existence or absence of these limit cycles is pivotal in studying the dynamics of differential systems. Consequently, numerous authors have delved into the examination of limit cycles in discontinuous piecewise linear differential systems separated by a straight line, as evidenced by the literature in this field, see ref. [7] for more details without being exhaustive for a piecewise model on the Savanna ecosystem, ref. [8] for a piecewise model on canard limit cycles, ref. [9] for the index theory of the piecewise models, ref. [10] for the global dynamics of some piecewise models, ref. [11] for a center problem in piecewise models, ref. [12] for showing a switching phenomenon of a limit cycle under Filippov construction of the Hamiltonian system, refs. [13,14] for some properties of the piecewise linear models, and refs. [15,16,17,18,19,20,21] for the study of the limit cycles of different piecewise models.
In this paper, we study the limit cycles for the class of discontinuous piecewise differential systems separated by a straight line and formed by two Hamiltonian systems of degree either one, two, or three. Without loss of generality, we can consider that the straight line of discontinuity is and that the vector field associated with these discontinuous piecewise differential systems is
where is the vector field of the Hamiltonian system
with Hamiltonian for . The behavior of the piecewise differential system on the line of discontinuity is defined following Filippov’s rules, see [22]. Usually such discontinuous piecewise differential systems are called Filippov’s systems.
Our main result is the following one.
Theorem 1.
Consider the discontinuous piecewise differential system (1) formed by two arbitrary Hamiltonians and of degree
Moreover, there are differential systems (1) formed by two convenient Hamiltonians and of the corresponding degree realizing the upper bounds on the number of limit cycles of statements and .
Theorem 1 is proved in Section 2.
2. Proof of Theorem 1
Proof of statement of Theorem 1.
Consider two arbitrary Hamiltonians of degree two as follows
These Hamiltonians generate the next Hamiltonian systems of degree one
Of course, and are first integrals of systems (2) and (3), respectively. Now, we look for the limit cycles that intersect the straight line at the points and with To complete this, we analyze how many solutions have the following polynomial system.
Solving system (4) is equivalent to finding the solutions of the system
Since the straight lines and are parallel, it follows that system (5) has either no solutions with respect to the variables and , or infinitely many solutions. In both cases, the discontinuous piecewise differential system can not have limit cycles. □
For the proof of statement (b) of Theorem 1, we shall use the next well-known result; for the proof, see, for instance, [23].
Theorem 2
(Bézout Theorem). Let f and g be two polynomials in of degrees n and m, respectively. Then, if the set has finitely many solutions, then it has at most points.
Proof of statement of Theorem 1.
Consider the following two arbitrary Hamiltonians of degree three:
These Hamiltonians generate the Hamiltonian systems
Again and are first integrals of systems (6) and (7), respectively. Now, we look for the limit cycles that intersect the straight line at the points and with So we must analyze how many solutions the system has.
Solving system (8) is equivalent to finding the solutions of the system
where Notice that
Using the Bézout Theorem, the upper bound for the maximum number of solutions of system and is 2, when this system has finitely many solutions. Note that by the symmetry of these polynomial equations, if is a solution, then is also a solution, but these two solutions provide the same periodic orbit. Then, this family of discontinuous piecewise differential systems has at most one limit cycle. This upper bound is reached as can be seen in Example 1 of Section 3. □
Proof of statement of Theorem 1.
Consider two arbitrary Hamiltonians of degree four,
These Hamiltonians generate the following two Hamiltonian systems
and
respectively. The Hamiltonians and are first integrals of systems (9) and (10), respectively. Now, we look for the limit cycles that intersect the straight line at the points and with To complete that, we analyze how many solutions the system
can have. Defining
Since we are interested in the solutions with , system (11) is equivalent to system , i.e.,
Notice that
is a polynomial of degree two. Using the Bézout Theorem, the upper bound for the maximum number of solutions of system and is 6, when this system has finitely many solutions. Again, note that by the symmetry of these polynomial equations, if is a solution, then is also a solution, but these two solutions provide the same periodic orbit. This implies that the discontinuous piecewise differential systems has at most three limit cycles. This upper bound is reached, see Example 2 of Section 3. □
3. Examples
In this section, we provide in example 1 a discontinuous piecewise differential system separated by the straight line is formed by two Hamiltonians systems of degree 2 with one limit cycle. Furthermore, in example 2, a discontinuous piecewise differential system separated by the straight line is formed by two Hamiltonians systems of degree 3 with three limit cycles. Hence, these two examples complete the proof of Theorem 1.
Example 1.
Consider the following two Hamiltonians of degree three,
These Hamiltonians generate the Hamiltonian systems
respectively. Of course and are first integrals of systems (13) and (14), respectively. For this discontinuous piecewise differential system, system (11) provides the system
System (15) has the unique real solution
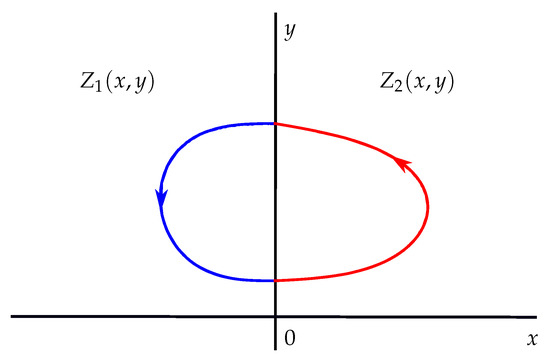
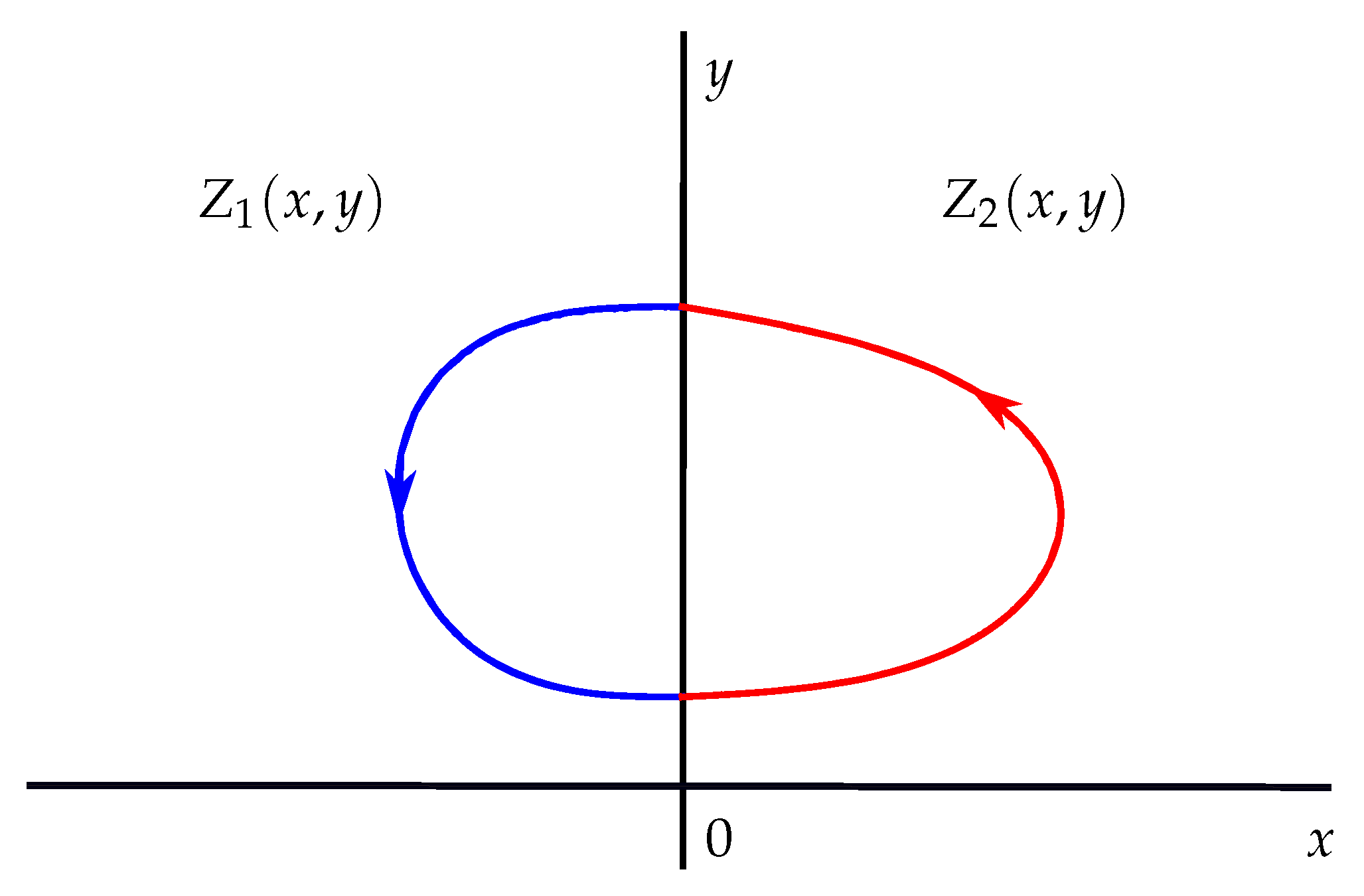
Then, the two points of intersection with of the limit cycle are and , see this limit cycle in Figure 1.
Example 2.
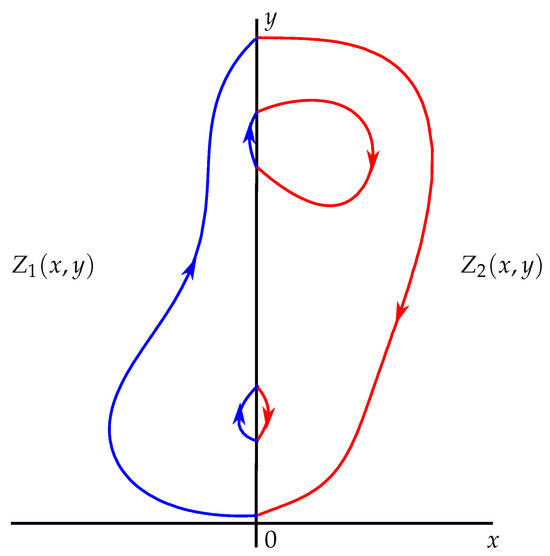
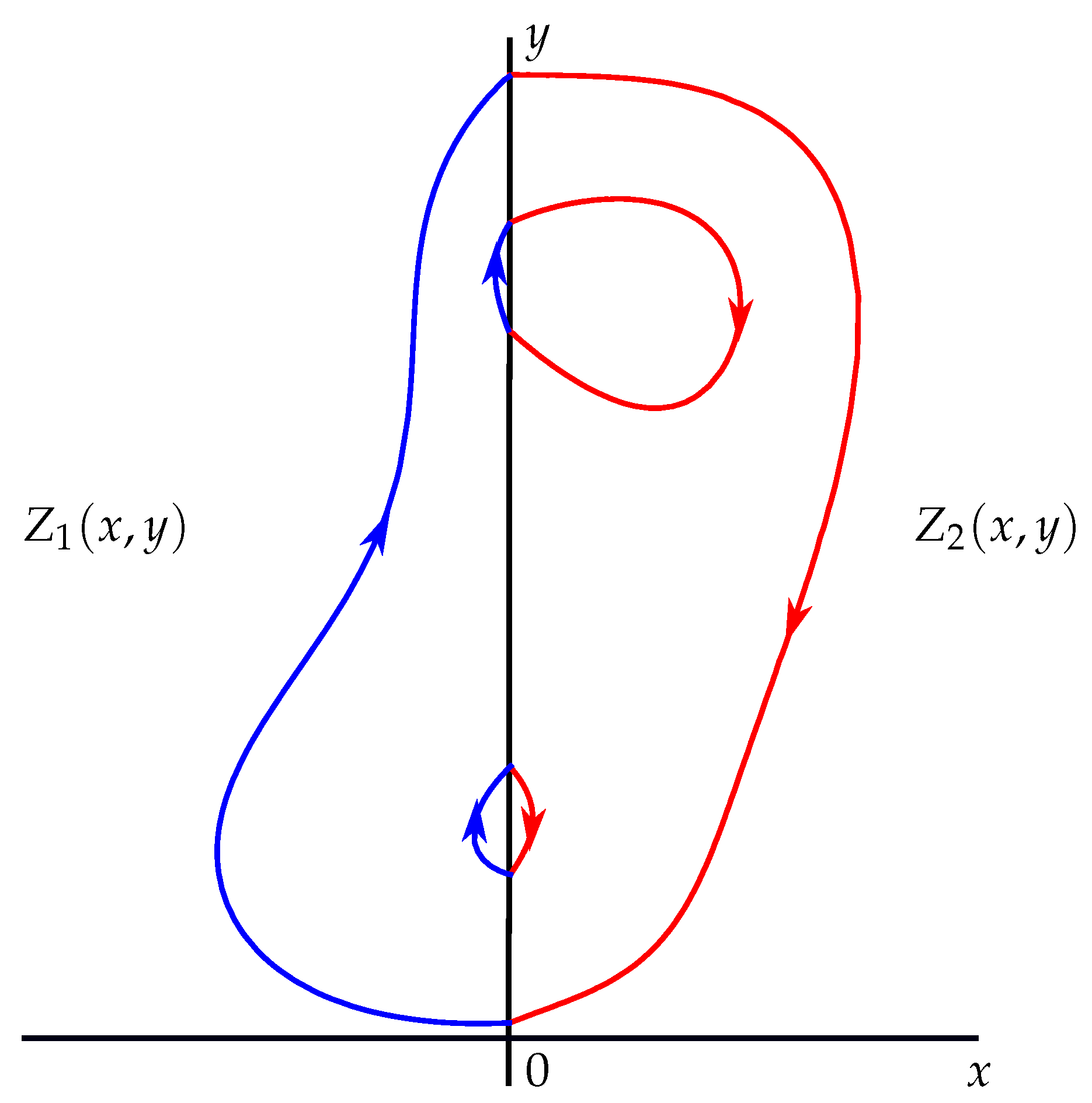
Then, the two points of intersection with of each limit cycle are and for ; see these three limit cycles in Figure 2.
Author Contributions
The two authors contributed equally to this work. All authors have read and agreed to the published version of the manuscript.
Funding
The first author is partially supported by the grants 2018/25575-0 and #2022/01375-7 of the São Paulo Research Foundation (FAPESP). The second author is partially supported by the Agencia Estatal de Investigación grantPID2022-136613NB-100, the H2020 European Research Council grant MSCA-RISE-2017-777911, the Generalitat de Catalunya grant 2021 SGR 00113, and by the Real Acadèmia de Ciències i Arts de Barcelona.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Appell, J.; Hien, N.T.; Petrova, L.; Pryadko, I. Systems with Non-Smooth Inputs: Mathematical Models of Hysteresis Phenomena, Biological Systems, and Electric Circuits; Walter de Gruyter GmbH & Co KG: Berlin, Germany, 2021. [Google Scholar]
- Brhane, K.W.; Gebru, M.G.; Ahmad, A.G. Mathematical model for the dynamics of savanna ecosystem considering fire disturbances. J. Theor. Biol. 2021, 509, 110515. [Google Scholar] [CrossRef] [PubMed]
- Hening, A.; Li, Y. Stationary distributions of persistent ecological systems. J. Math. Biol. 2021, 82, 64. [Google Scholar] [CrossRef] [PubMed]
- Simpson, D.J.W. Bifurcations in Piecewise-Smooth Continuous Systems; World Scientific: Singapore, 2010; Volume 70. [Google Scholar]
- Bernardo, M.; Budd, C.; Champneys, A.R.; Kowalczyk, P. Piecewise-Smooth Dynamical Systems: Theory and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008; Volume 163. [Google Scholar]
- Makarenkov, O.; Lamb, J.S. Dynamics and bifurcations of nonsmooth systems: A survey. Phys. D Nonlinear Phenom. 2012, 241, 826–1844. [Google Scholar] [CrossRef]
- Benabdallah, I.; Benterki, R.; Llibre, J. Limit cycles of discontinuous piecewise differential systems separated by a straight line and formed by cubic reversible isochronous centers having rational first integrals. Dyn. Contin. Discrete Impuls. Syst. Ser. B Appl. Algorithms 2024, 31, 1–23. [Google Scholar]
- Carmona, V.; Fernández-García, S.; Teruel, A. Saddle–node canard cycles in slow–fast planar piecewise linear differential systems. Nonlinear Anal. Hybrid Syst. 2024, 52, 101472. [Google Scholar] [CrossRef]
- Li, K.; Li, S. On the poincaré–bendixson index theorem for a class of piecewise linear differential systems. Qual. Theory Dyn. Syst. 2024, 23, 9. [Google Scholar] [CrossRef]
- Villanueva, Y.; Euzébio, R. Global dynamics of planar piecewise linear inelastic systems having straight lines as switching manifolds. Nonlinear Anal. Real World Appl. 2024, 76, 103994. [Google Scholar] [CrossRef]
- Zou, C.; Dong, G.; Liu, C.; Yang, J. The center problem on piecewise smooth differential systems with two zones. Discret. Contin. Dyn. Syst. 2024, 44, 523. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, J.; Liu, X. Non-differentiability of quasi-potential and non-smooth dynamics of optimal paths in the stochastic morris–lecar model: Type i and ii excitability. Nonlinear Dyn. 2019, 96, 2293–2305. [Google Scholar] [CrossRef]
- Artés, J.C.; Llibre, J.; Medrado, J.C.; Teixeira, M.A. Piecewise linear differential systems with two real saddles. Math. Comput. Simul. 2014, 95, 13–22. [Google Scholar] [CrossRef]
- Euzébio, R.D.; Llibre, J. On the number of limit cycles in discontinuous piecewise linear differential systems with two pieces separated by a straight line. J. Math. Anal. Appl. 2015, 424, 475–486. [Google Scholar] [CrossRef]
- Chen, H.; Li, D.; Xie, J.; Yue, Y. Limit cycles in planar continuous piecewise linear systems. Commun. Nonlinear Sci. Numer. Simul. 2017, 47, 438–454. [Google Scholar] [CrossRef]
- Freire, E.; Ponce, E.; Torres, F. A general mechanism to generate three limit cycles in planar filippov systems with two zones. Nonlinear Dyn. 2014, 78, 251–263. [Google Scholar] [CrossRef]
- Giannakopoulos, F.; Pliete, K. Planar systems of piecewise linear differential equations with a line of discontinuity. Nonlinearity 2001, 14, 1611. [Google Scholar] [CrossRef]
- Gouveia, M.R.; Llibre, J.; Novaes, D.D. On limit cycles bifurcating from the infinity in discontinuous piecewise linear differential systems. Appl. Math. Comput. 2015, 271, 365–374. [Google Scholar] [CrossRef]
- Huan, S.-M.; Yang, X.-S. Existence of limit cycles in general planar piecewise linear systems of saddle–saddle dynamics. Nonlinear Anal. Theory Methods Appl. 2013, 92, 82–95. [Google Scholar] [CrossRef]
- Huan, S.-M.; Yang, X.-S. On the number of limit cycles in general planar piecewise linear systems of node–node types. J. Math. Anal. Appl. 2014, 411, 340–353. [Google Scholar] [CrossRef]
- Li, L. Three crossing limit cycles in planar piecewise linear systems with saddle-focus type. Electron. J. Qual. Theory Differ. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides: Control Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 18. [Google Scholar]
- Fulton, W. Algebraic Curves: An Introduction to Algebaric Geometry; Addison-Wesley: Boston, MA, USA, 2008. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).