

Stability and Convergence Analysis of the Discrete Dynamical System for Simulating a Moving Bed



Abstract
1. Introduction
2. Discrete Model for SMB
2.1. Using Crank–Nicolson Method for Discrete Partial Differential Equations
2.2. Boundary Numerate Condition
3. Stability and Convergence Analysis
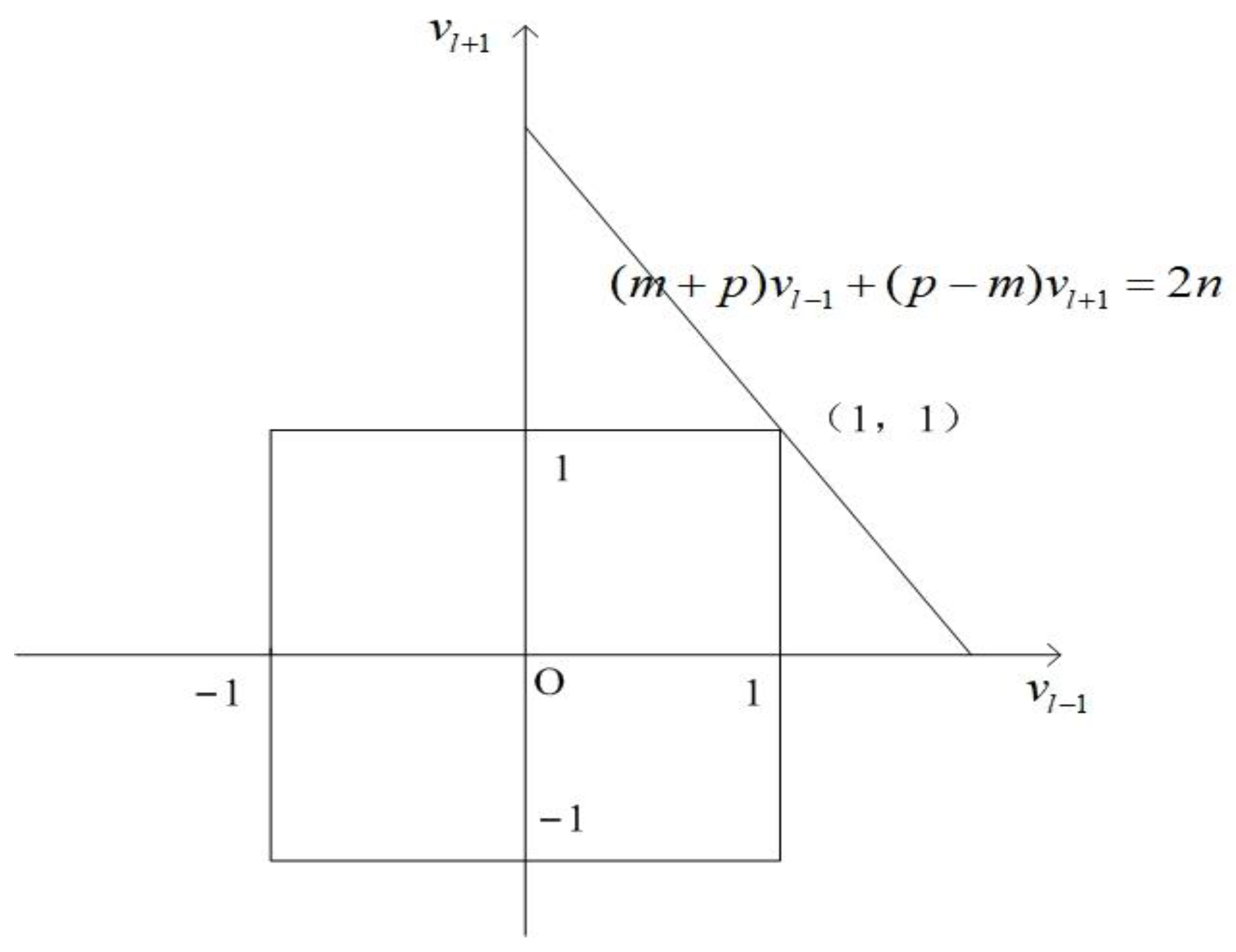
3.1. Stability Analysis
3.2. Convergence Analysis
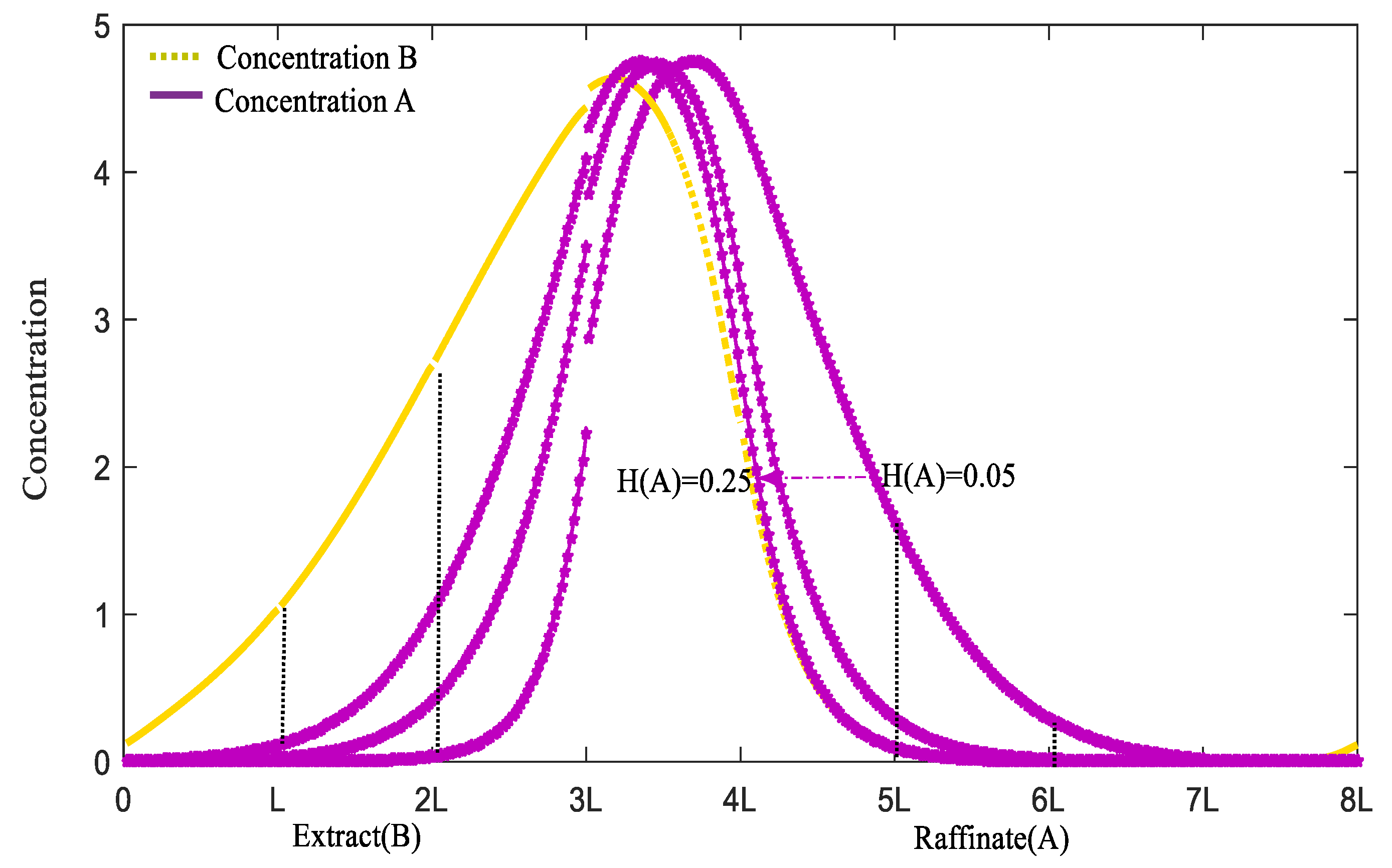
4. Simulation
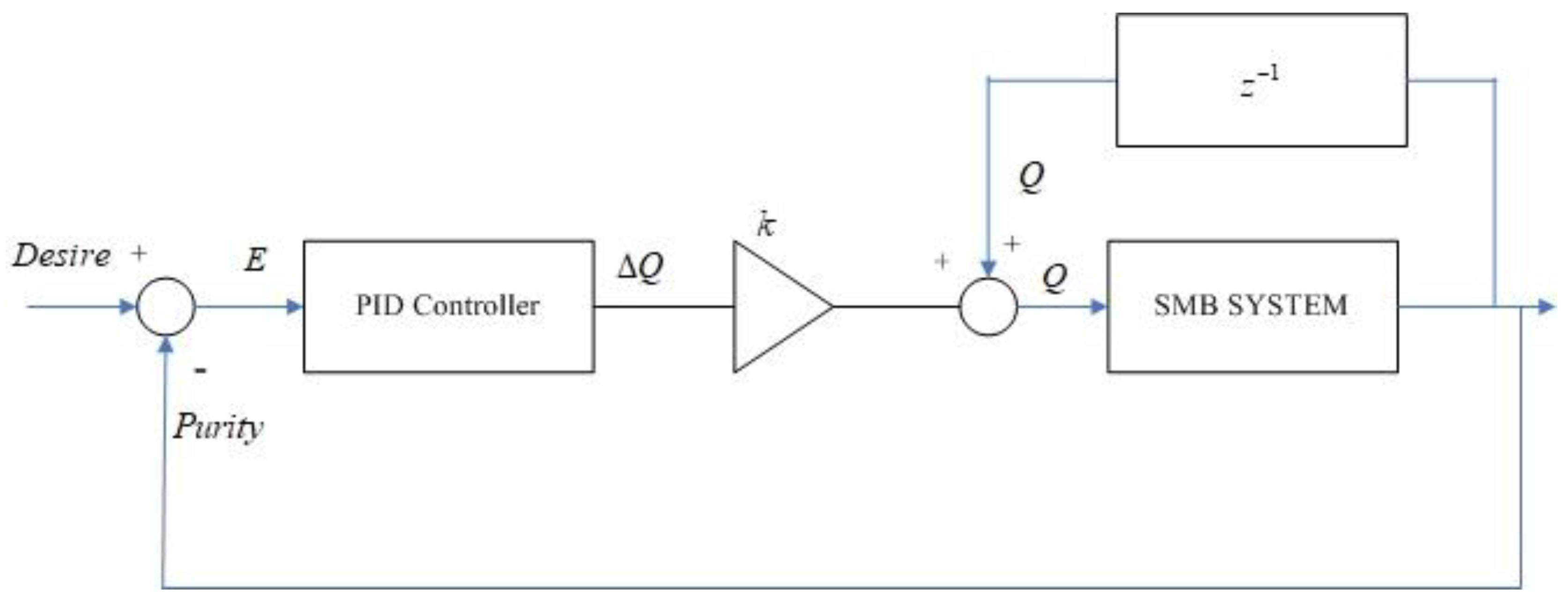
5. Controller Simulation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rajendran, A.; Paredes, G.; Mazzotti, M. Simulated moving bed chromatography for the separation of enantiomers. J. Chromatogr. A 2009, 1216, 709–738. [Google Scholar] [CrossRef]
- Chin, C.Y.; Wang, N.L. Simulated moving bed equipment designs. Sep. Purif. Rev. 2007, 33, 77–155. [Google Scholar] [CrossRef]
- Kim, J.I.; Wankat, P.C.; Sungyong, M.; Yoon, K. Analysis of “focusing” effect in four zone SMB (simulated moving bed) unit for separation of xylose and glucose from biomass hydrolysate. J. Biosci. Bioeng. 2009, 108, 65–76. [Google Scholar] [CrossRef]
- Suvarov, P.; Kienle, A.; Nobre, C.; Weireld, G.D.; Wouwer, A.V. Cycle to cycle adaptive control of simulated moving bed chromatographic separation processes. J. Process Control 2014, 24, 357–367. [Google Scholar] [CrossRef]
- Choi, J.H.; Kang, M.S.; Lee, C.G.; Wang, N.H.L.; Mun, S. Design of simulated moving bed for separation of fumaric acid with a little fronting phenomenon. J. Chromatogr. A 2017, 1491, 75–86. [Google Scholar] [CrossRef]
- Supelano, R.C.; Barreto, A.G., Jr.; Neto, A.S.A.; Secch, A.R.I. One-step optimization strategy in the simulated moving bed process with asynchronous movement of ports: A VariCol case study. J. Chromatogr. A 2020, 1634, 1672–1718. [Google Scholar]
- Reinaldo, C.S.; Gomes, B.A.; Resende, S.A. Optimal performance comparison of the simulated moving bed process variants based on the modulation of the length of zones and the feed concentration. J. Chromatogr. A 2021, 1651, 462280. [Google Scholar]
- Sá Gomes, P.M.D. Advances in Simulated Moving Bed: New Operating Modes: New Design Methodologies and Product (FlexSMB-LSRE) Development. Ph.D. Thesis, University of Porto (FEUP), Porto, Portugal, 2009. [Google Scholar]
- Dunnebier, G.; Weirich, I.; Klatt, K.U. Computationally efficient dynamic modelling and simulation of simulated moving bed chromatographic processes with linear isotherms. Chem. Eng. Sci. 1998, 53, 2537–2546. [Google Scholar] [CrossRef]
- Neto, A.S.A.; Secchi, A.R.; Souza, M.B.; Barreto, A.G. Nonlinear model predictive control applied to the separation of praziquantel in simulated moving bed chromatography. J. Chromatogr. A 2016, 1470, 42–49. [Google Scholar] [CrossRef]
- Muhammed, T.; Tokay, B.; Conradie, A. Raising the Research Octane Number using an optimized Simulated Moving Bed technology towards greater sustainability and economic return. Fuel 2023, 337, 126864. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, J.S.; Wang, S.Y.; Li, S.J.; Wang, D.; Sun, W.Z. Model Predictive Control Method of Simulated Moving Bed Chromatographic Separation Process Based on Subspace System Identification. Math. Probl. Eng. 2019, 2019, 2391891. [Google Scholar] [CrossRef]
- Leao, C.P.; Rodrigues, A.E. Transient and steady-state models for simulated moving bed processes: Numerical solutions. Comput. Chem. Eng. 2004, 28, 1725–1741. [Google Scholar] [CrossRef]
- Majeed, H.; Hillestad, M.; Knuutila, H.; Svendsen, H.F. Predicting aerosol size distribution development in absorption columns. Chem. Eng. Sci. 2018, 192, 25–33. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, T.; Park, C.; Lee, J.; Cho, H.; Kim, M.; Moon, I. Development of novel flow distribution apparatus for simulated moving bed to improve degree of mixing. Comput. Chem. Eng. 2022, 156, 107553. [Google Scholar] [CrossRef]
- Lee, W.S.; Lee, C.H. Dynamic modeling and machine learning of commercial-scale simulated moving bed chromatography for application to multi-component normal paraffin separation NSTL. Sep. Purif. Technol. 2022, 288, 120597. [Google Scholar] [CrossRef]
- Li, S.; Wei, D.; Wang, J.S.; Yan, Z.; Wang, S.Y. Predictive control method of simulated moving bed chromatographic separation process based on piecewise affine. Int. J. Appl. Math. 2020, 50, 1–12. [Google Scholar]
- Hoon, O.T.; Woo, K.J.; Hwan, S.S.; Hosoo, K.; Kyungmoo, L.; Min, L.J. Automatic control of simulated moving bed process with deep Q-network. J. Chromatogr. A 2021, 1647, 462073. [Google Scholar]
- Natarajan, S.; Lee, J.H. Repetitive model predictive control applied to a simulated moving bed chromatography system. Comput. Chem. Eng. 2000, 24, 1127–1133. [Google Scholar] [CrossRef]
- Klatt, K.U.; Hanisch, F.; Dunnebier, G. Mode-based control of a simulated moving bed chromatographic process for the separation of frutose and glucose. J. Process Control 2002, 12, 203–219. [Google Scholar] [CrossRef]
- Carlos, V.; Alain, V.W. Combination of multi-model predictive control and the wave theory for the control of simulated moving bed plants. J. Chem. Eng. Sci. 2017, 66, 632–641. [Google Scholar]
- Marrocos, H.; Iwakiri, I.G.I.; Martins, M.A.F.; Rodrigues, A.E.; Loureiro, J.M.; Ribeiro, A.M.; Nogueira, I.B.R. A long short-term memory based Quasi-Virtual Analyzer for dynamic real-time soft sensing of a Simulated Moving Bed unit. Appl. Soft Comput. 2022, 116, 108318. [Google Scholar] [CrossRef]
- Santos, L.U.; Delgado, J.A.; Agueda, V.I. Recovery of a Succinic, Formic, and Acetic Acid Mixture from a Model Fermentation Broth by Simulated Moving Bed Adsorption with Methanol as a Desorbent. Ind. Eng. Chem. Res. 2022, 61, 672–683. [Google Scholar] [CrossRef]
- Suzuki, K.; Harada, H.; Sato, K.; Okada, K.; Tsuruta, M.; Yajima, T.; Kawajiri, Y. Utilization of operation data for parameter estimation of simulated moving bed chromatography. J. Adv. Manuf. Process. 2022, 4, 10103. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, X.; Zhang, N. Optimizing control of adsorption separation processes based on the improved moving asymptotes algorithm. Adsorpt. Sci. Technol. 2018, 36, 1716–1733. [Google Scholar] [CrossRef]
- Nogueira, I.B.; Martins, M.A.; Rodrigues, A.E.; Loureiro, J.M.; Ribeiro, A.M. Novel Switch Stabilizing Model Predictive Control Strategy Applied in the Control of a Simulated Moving Bed for the Separation of Bi-Naphthol Enantiomers. Ind. Eng. Chem. Res. 2020, 59, 1979–1988. [Google Scholar] [CrossRef]
- Xie, C.-F.; Hong, Z.; Rey-Chue, H. Discrete Dynamic System Modeling for Simulated Moving Bed Processes. Mathematics 2024, 12, 1520. [Google Scholar] [CrossRef]
- Crank, J.; Nicolson, P. A Practical Method for Numerical Evaluation of Solutions of Partial Differential Equations for the Heat Conduction Type; Cambridge University Press: Cambridge, UK, 1947; Volume 43, pp. 50–67. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Nomenclature | Parameter | Nomenclature |
|---|---|---|---|
| Axial distance | Volume flow rate | ||
| Comprehensive mass transfer constant | Time | ||
| Effect velocity of body | Effective dispersion coefficient | ||
| Solid flow rate | Bulk void fraction | ||
| Mobile phase concentration | Material index: A or B | ||
| Solid phase concentration | Column number: 1, 2, 3, 4, 5, 6, 7, 8 | ||
| Solid phase concentration at equilibrium between solid phase and mobile phase |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 25 | 5 | ||
| 0.46 | 3 | ||
| 0.001 | 6.75 | ||
| 0.45 | 6.6 | ||
| 0.2 | 7 | ||
| 1.265 | 2 | ||
| 0.8 | spatial number | 50 |
| Region | Kp | Kd | Ki |
|---|---|---|---|
| I | 0.8 | 0.02 | 0.02 |
| II | 0.000097 | 0.00005 | 0.00005 |
| III | 0.02 | 0.003 | 0.003 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, C.-F.; Zhang, H.; Hwang, R.-C. Stability and Convergence Analysis of the Discrete Dynamical System for Simulating a Moving Bed. Axioms 2024, 13, 586. https://doi.org/10.3390/axioms13090586
Xie C-F, Zhang H, Hwang R-C. Stability and Convergence Analysis of the Discrete Dynamical System for Simulating a Moving Bed. Axioms. 2024; 13(9):586. https://doi.org/10.3390/axioms13090586
Chicago/Turabian StyleXie, Chao-Fan, Hong Zhang, and Rey-Chue Hwang. 2024. "Stability and Convergence Analysis of the Discrete Dynamical System for Simulating a Moving Bed" Axioms 13, no. 9: 586. https://doi.org/10.3390/axioms13090586
APA StyleXie, C.-F., Zhang, H., & Hwang, R.-C. (2024). Stability and Convergence Analysis of the Discrete Dynamical System for Simulating a Moving Bed. Axioms, 13(9), 586. https://doi.org/10.3390/axioms13090586