

Elastic Obstacle-Surmounting Pipeline-Climbing Robot with Composite Wheels

Abstract
:1. Introduction
2. Mechanism Design and Implementation
2.1. Problem Description
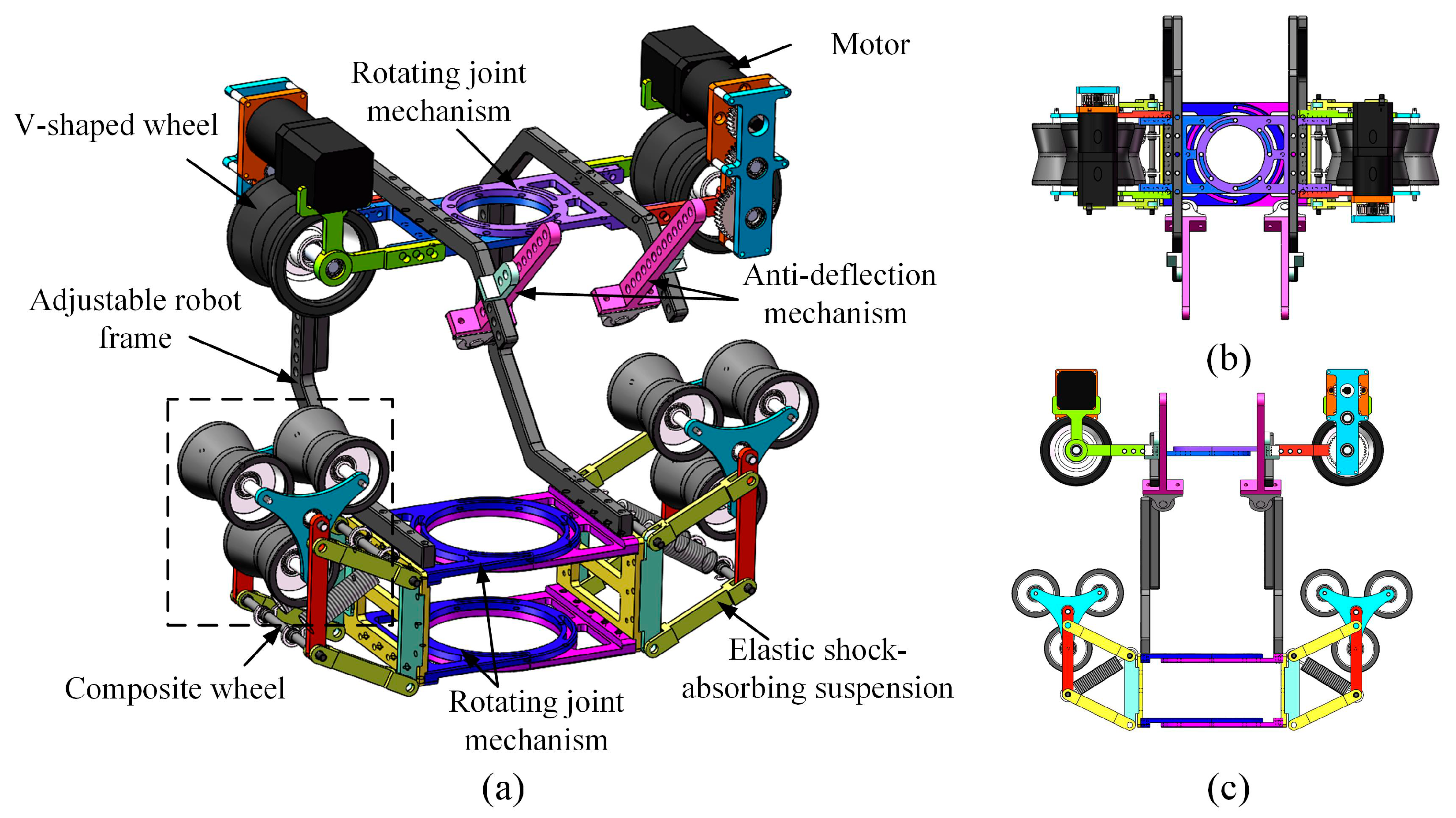
- Adaptability of curved pipelines: the robot should be able to flexibly climb on pipelines with different curvatures and diameters.
- Obstacle-surmounting capacity: the robot needs to avoid and surmount obstacles of different forms, such as welded L-shaped holder and uneven obstacles on pipelines.
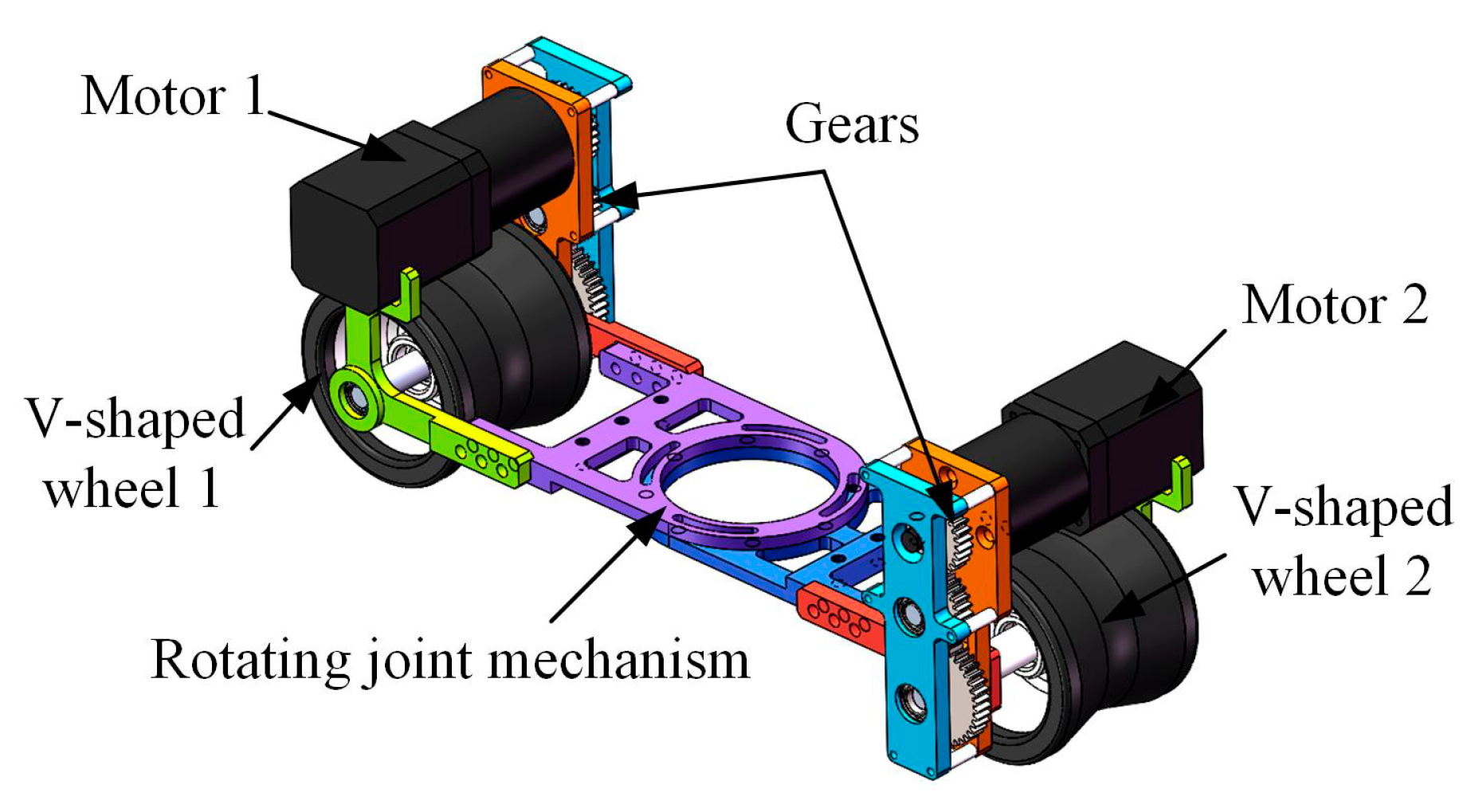
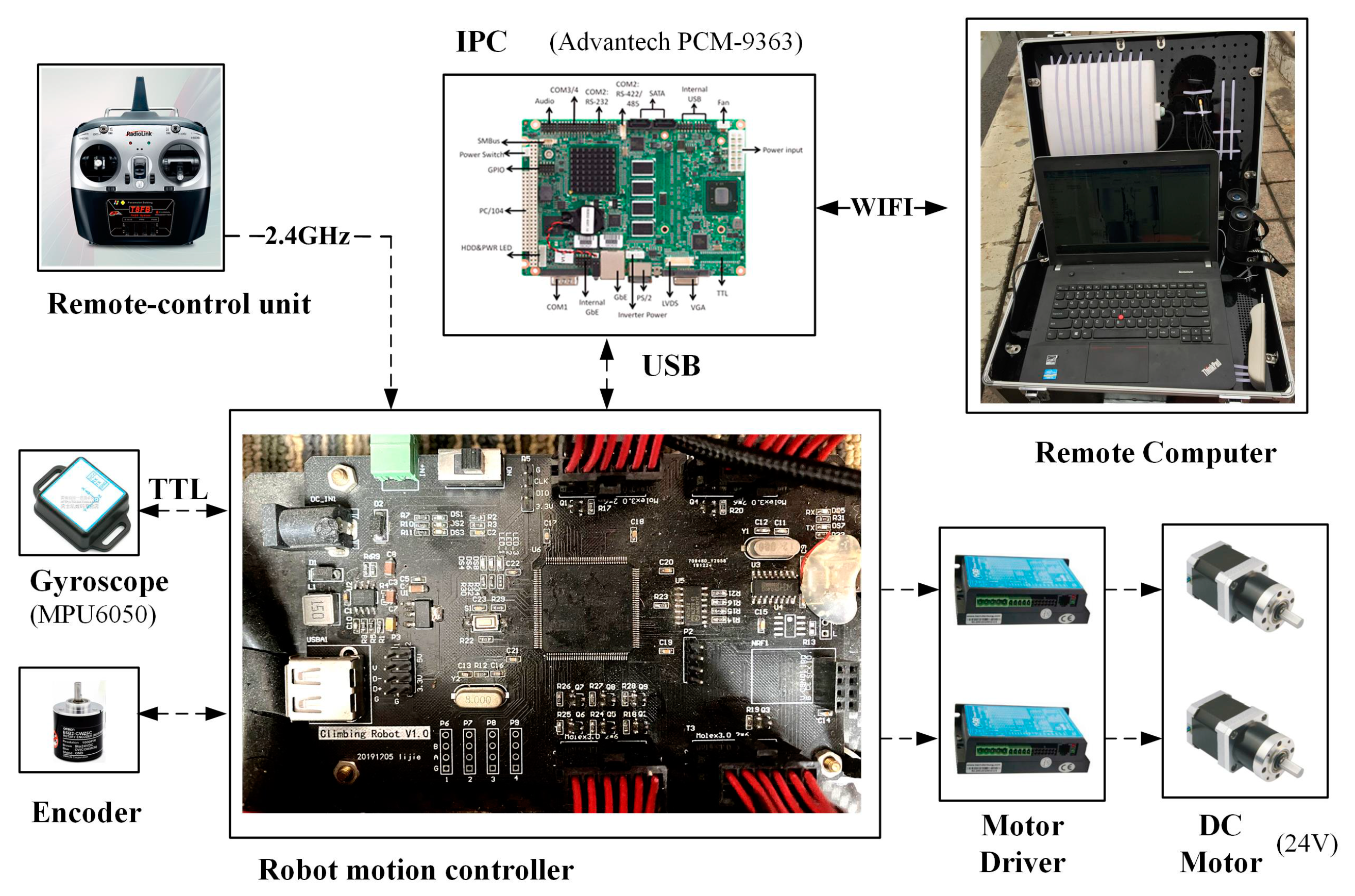
2.2. Robot Mechanical Design
3. Analysis of Obstacle Surmounting
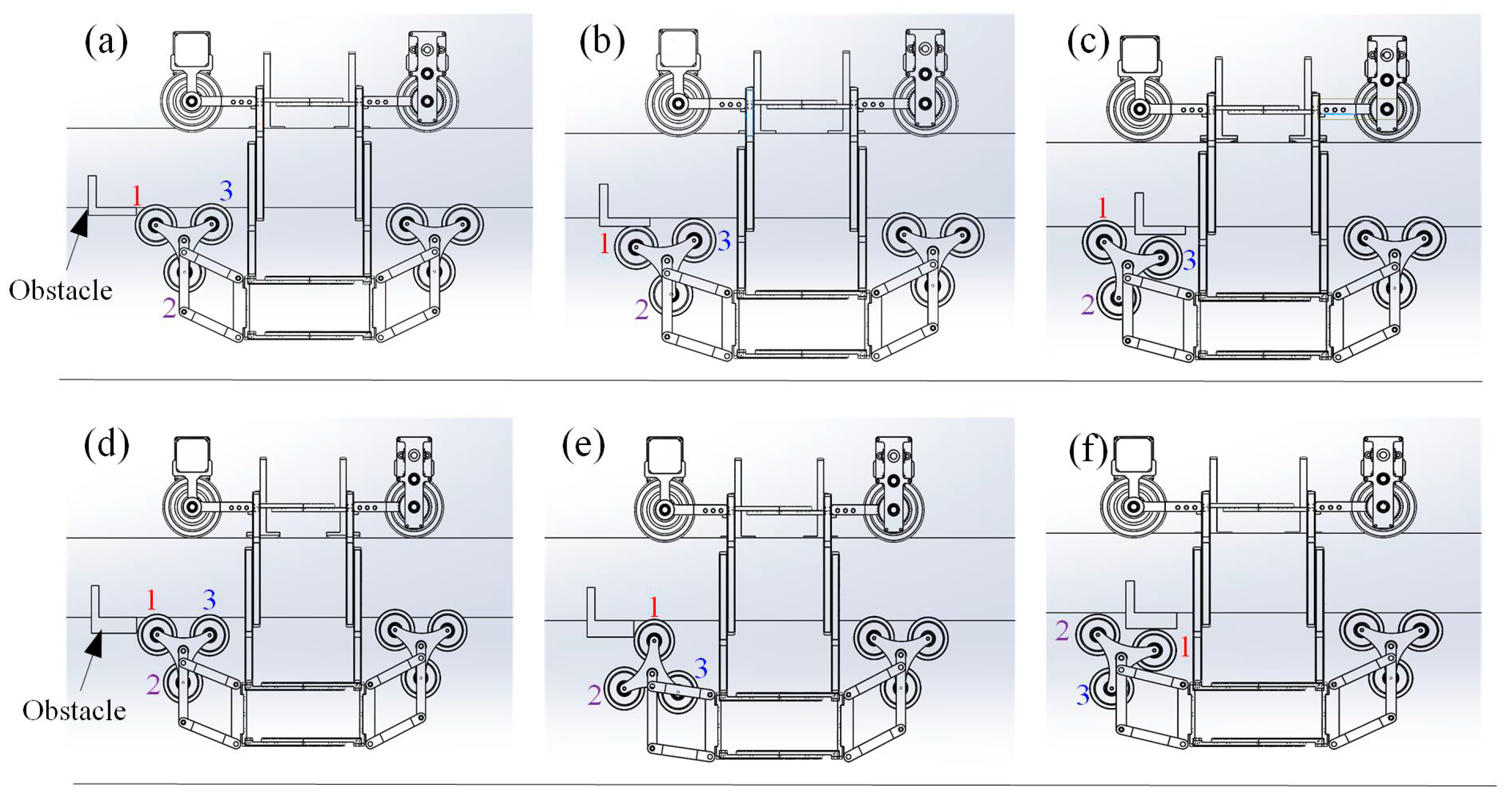
3.1. Obstacle-Surmounting Modality
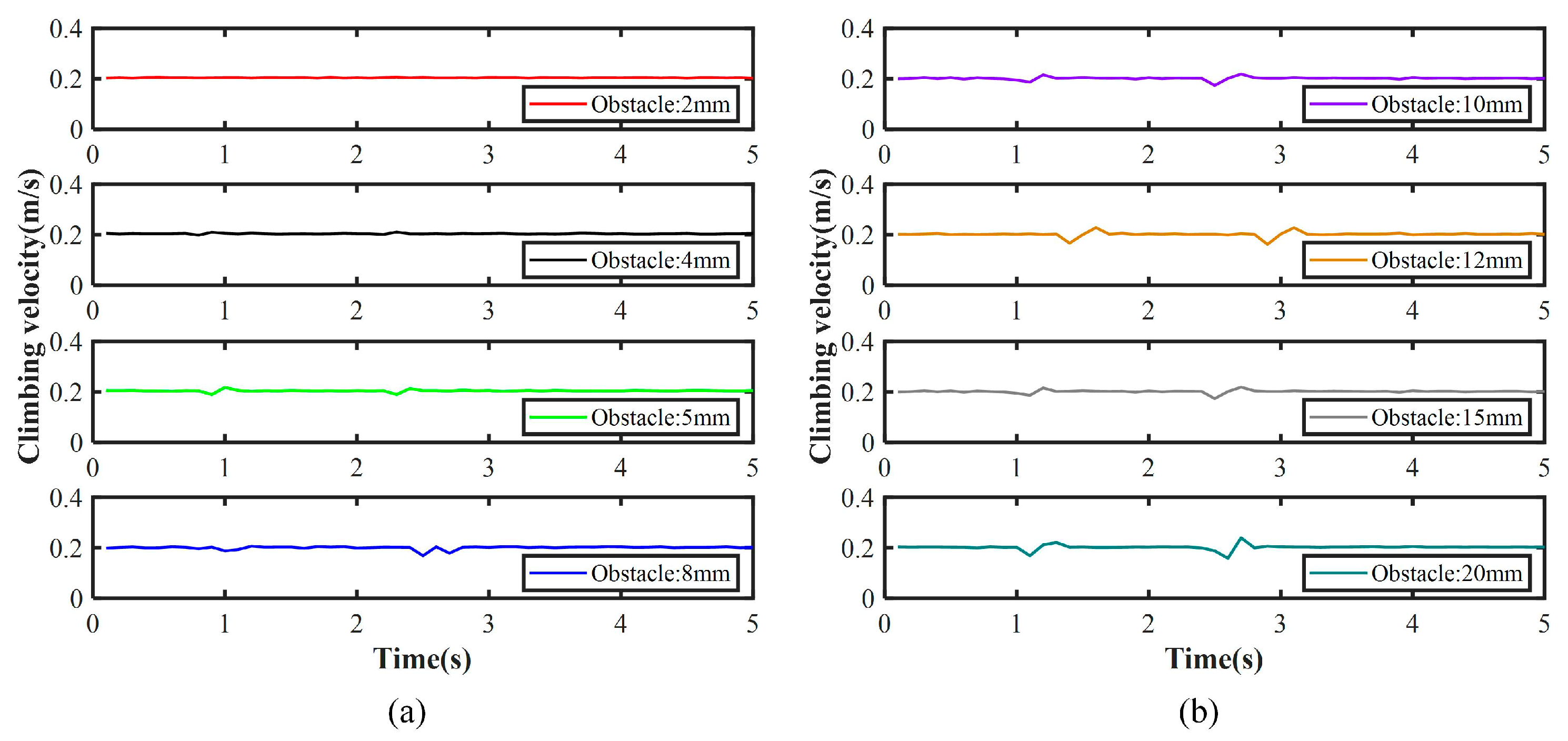
- When the obstacle height is low (such as 3 mm), the composite wheels will be lifted to surmount the obstacle directly. The small V-shaped wheels of the composite wheels alternately pass the obstacle and return to the initial state.
- When the obstacle height is high (such as 20 mm), the small V-shaped wheels of the composite wheels will be blocked, and the composite wheels will surmount the obstacle by rotating modality. In this process, one small V-shaped wheel changes from the contact state to the suspended state, and the other suspended small V-shaped wheel contacts and surmounts the obstacle. Three small V-shaped wheels of the composite wheel can surmount higher obstacles by rotating themselves.
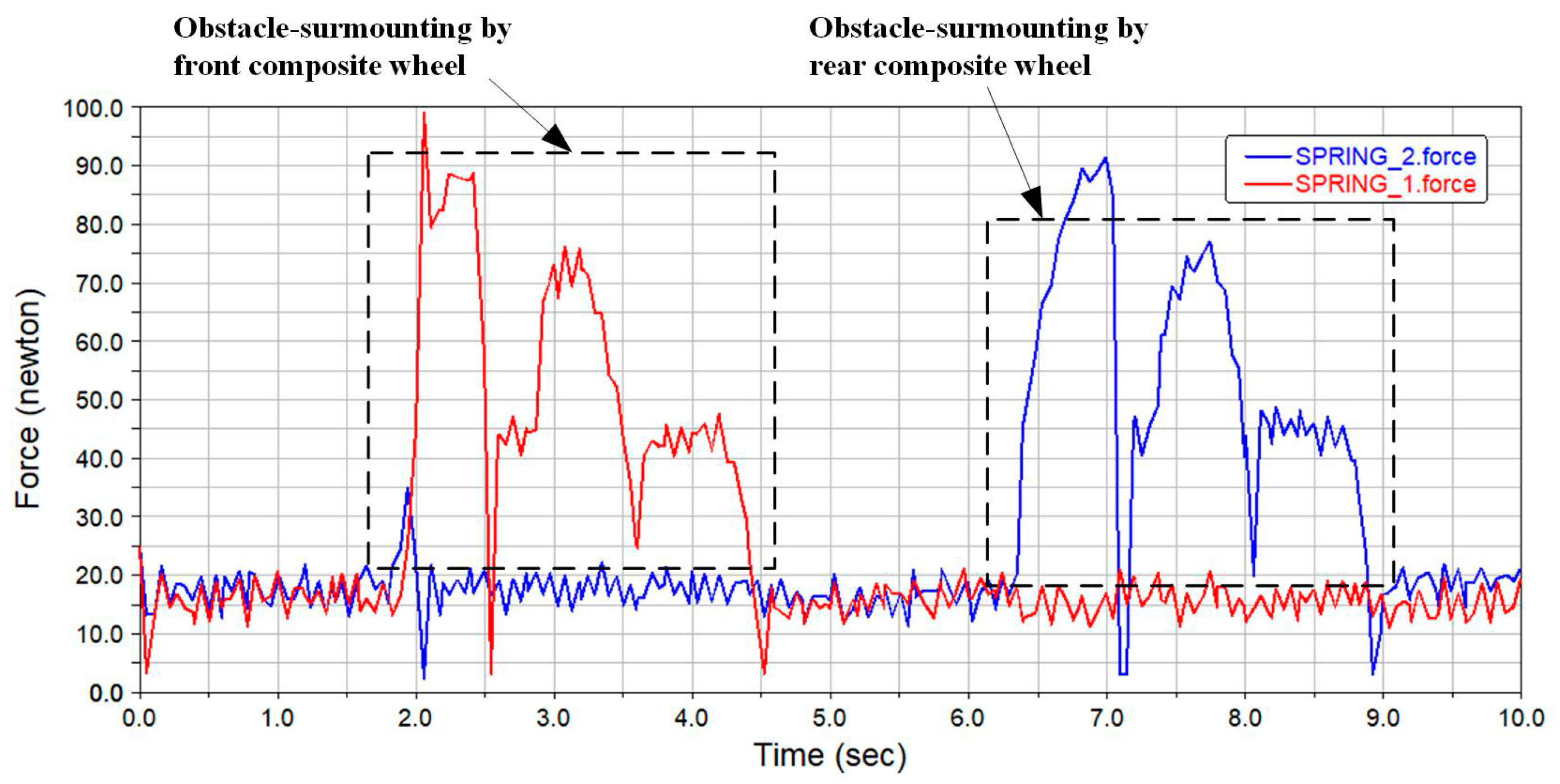
3.2. Force Analysis of ObstacleSurmounting
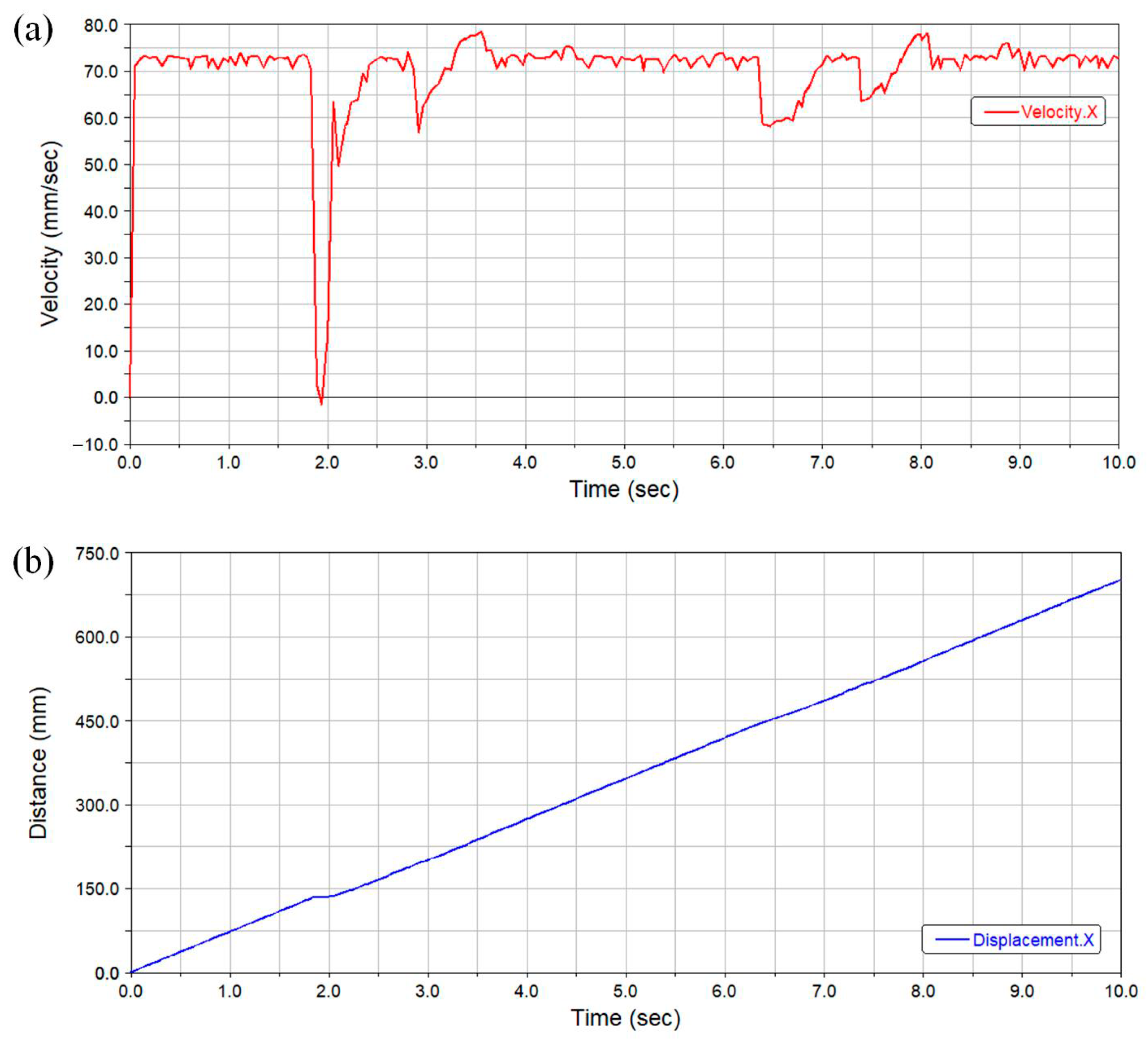
4. Virtual Model Simulation Analysis
5. Experiments
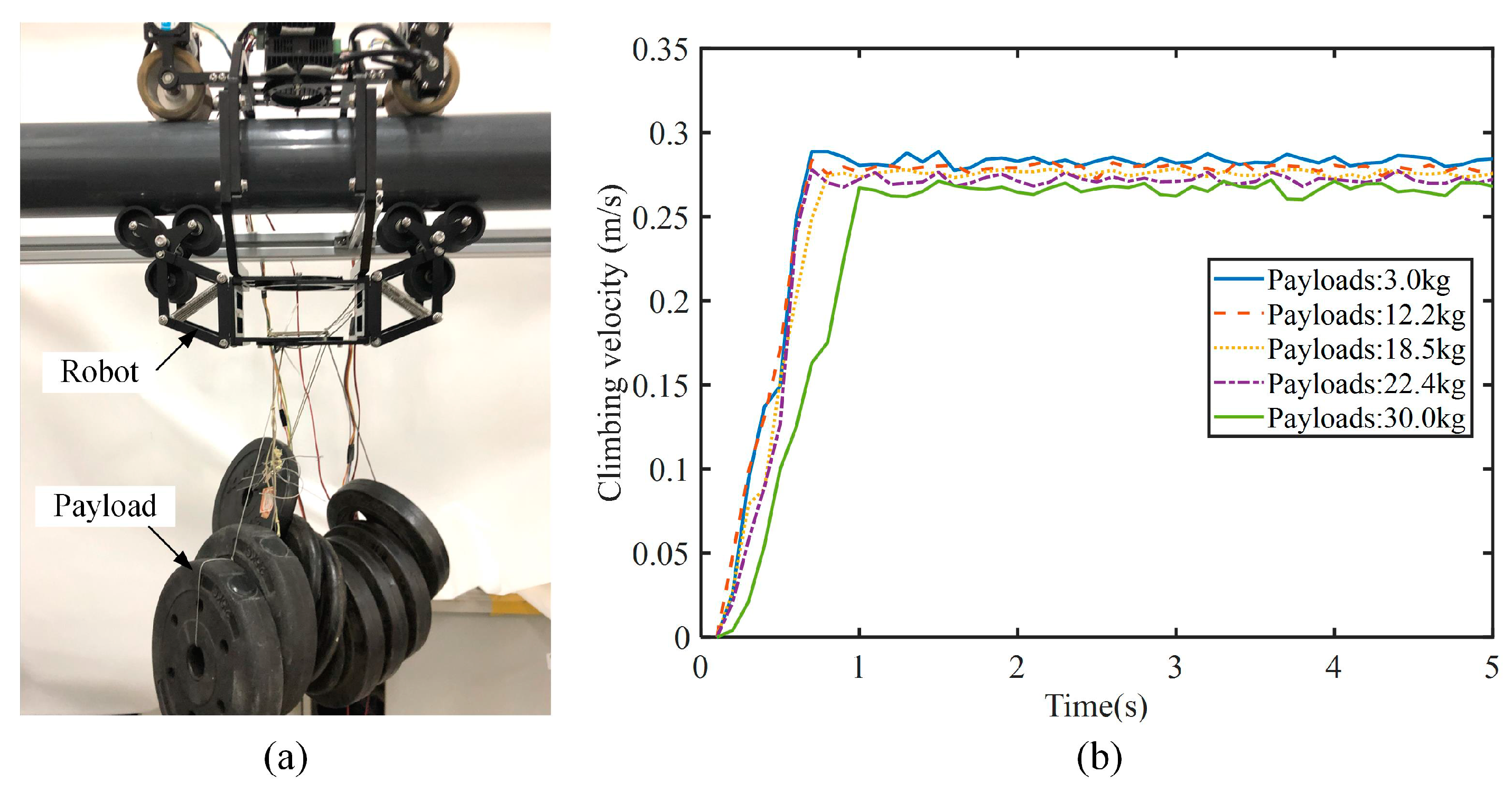
5.1. Payload Experiments
5.2. Obstacle-Surmounting Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nguyen, S.T.; La, H.M. A Climbing Robot for Steel Bridge Inspection. J. Intell. Robot. Syst. Theory Appl. 2021, 102, 1–21. [Google Scholar] [CrossRef]
- Liu, J.; Xu, L.; Xu, J.; Liu, L.; Cheng, G.; Chen, S.; Xu, H.; Shi, J.; Liang, X. Analysis and Optimization of the Wall-Climbing Robot with an Adsorption System and Adhesive Belts. Int. J. Adv. Robot. Syst. 2020, 17. [Google Scholar] [CrossRef]
- Lee, G.; Kim, H.; Seo, K.; Kim, J.; Kim, H.S. MultiTrack: A Multi-Linked Track Robot with Suction Adhesion for Climbing and Transition. Rob. Auton. Syst. 2015, 72, 207–216. [Google Scholar] [CrossRef]
- La, H.M.; Dinh, T.H.; Pham, N.H.; Ha, Q.P.; Pham, A.Q. Automated Robotic Monitoring and Inspection of Steel Structures and Bridges. Robotica 2019, 37, 947–967. [Google Scholar] [CrossRef]
- Noohi, E.; Mahdavi, S.S.; Baghani, A.; Ahmadabadi, M.N. Wheel-Based Climbing Robot: Modeling and Control. Adv. Robot. 2012, 24, 1313–1343. [Google Scholar] [CrossRef]
- Dissanayake, M.; Sattar, T.P.; Lowe, S.; Pinson, I.; Gan, T. Hean Adaptable Legged-Magnetic Adhesion Tracked Wheel Robotic Platform for Misaligned Mooring Chain Climbing and Inspection. Ind. Rob. 2018, 45, 634–646. [Google Scholar] [CrossRef]
- Ueki, S.; Kawasaki, H.; Ishigure, Y.; Koganemaru, K.; Mori, Y. Development and Experimental Study of a Novel Pruning Robot. Artif. Life Robot. 2011, 16, 86–89. [Google Scholar] [CrossRef]
- Lu, X.; Zhao, S.; Liu, X.; Wang, Y. Design and Analysis of a Climbing Robot for Pylon Maintenance. Ind. Robot Int. J. 2018, 45, 206–219. [Google Scholar] [CrossRef]
- Ding, Y.; Sun, Z.; Chen, Q. Non-Contacted Permanent Magnetic Absorbed Wall-Climbing Robot for Ultrasonic Weld Inspection of Spherical Tank. MATEC Web Conf. 2019, 269, 02013. [Google Scholar] [CrossRef]
- Allan, J.-F.; Lavoie, S.; Reiher, S.; Lambert, G. Climbing and Pole Line Hardware Installation Robot for Construction of Distribution Lines. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry (CARPI 2010), Montreal, QC, Canada, 5–7 October 2010; pp. 1–5. [Google Scholar]
- Zhang, W.; Zhang, W.; Sun, Z. A Reconfigurable Soft Wall-Climbing Robot Actuated by Electromagnet. Int. J. Adv. Robot. Syst. 2021, 18. [Google Scholar] [CrossRef]
- Liu, J.; Xu, L.; Chen, S.; Xu, H.; Cheng, G.; Xu, J. Development of a Bio-Inspired Wall-Climbing Robot Composed of Spine Wheels, Adhesive Belts and Eddy Suction Cup. Robotica 2021, 39, 3–22. [Google Scholar] [CrossRef]
- Kim, D.; Kim, Y.S.; Noh, K.; Jang, M.; Kim, S. Wall Climbing Robot with Active Sealing for Radiation Safety of Nuclear Power Plants. Nucl. Sci. Eng. 2020, 194, 1162–1174. [Google Scholar] [CrossRef]
- Tavakoli, M.; Lourenço, J.; Viegas, C.; Neto, P.; de Almeida, A.T. The Hybrid OmniClimber Robot: Wheel Based Climbing, Arm Based Plane Transition, and Switchable Magnet Adhesion. Mechatronics 2016, 36, 136–146. [Google Scholar] [CrossRef]
- Lam, T.L.; Xu, Y. Motion Planning for Tree Climbing with Inchworm-like Robots. J. Field Robot. 2013, 30, 87–101. [Google Scholar] [CrossRef]
- Xie, D.; Liu, J.; Kang, R.; Zuo, S. Fully 3D-Printed Modular Pipe-Climbing Robot. IEEE Robot. Autom. Lett. 2021, 6, 462–469. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, J.C.; Choi, Y.R. PiROB: Vision-Based Pipe-Climbing Robot for Spray-Pipe Inspection in Nuclear Plants. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Li, P.; Duan, X.; Sun, G.; Li, X.; Zhou, Y.; Liu, Y. Design and Control of a Climbing Robot for Inspection of High Mast Lighting. Assem. Autom. 2019, 39, 77–85. [Google Scholar] [CrossRef]
- Chen, G.; Yang, H.; Cao, H.; Ji, S.; Zeng, X.; Wang, Q. Design of an Embracing-Type Climbing Robot for Variation Diameter Rod. Ind. Rob. 2019, 46, 56–72. [Google Scholar] [CrossRef]
- Xiao, S.; Bing, Z.; Huang, K.; Huang, Y. Snake-like Robot Climbs inside Different Pipes. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics, ROBIO 2017, Macau, China, 5–8 December 2017. [Google Scholar]
- Li, T.; Ma, S.; Li, B.; Wang, M.; Li, Z.; Wang, Y. Development of an In-Pipe Robot with Differential Screw Angles for Curved Pipes and Vertical Straight Pipes. J. Mech. Robot. 2017, 9, 1–11. [Google Scholar] [CrossRef]
- Xu, Z.L.; Lu, S.; Yang, J.; Feng, Y.H.; Shen, C.T. A Wheel-Type in-Pipe Robot for Grinding Weld Beads. Adv. Manuf. 2017, 5, 182–190. [Google Scholar] [CrossRef]
- Li, X.; Gao, C.; Guo, Y.; He, F.; Shao, Y. Cable Surface Damage Detection in Cable-Stayed Bridges Using Optical Techniques and Image Mosaicking. Opt. Laser Technol. 2019, 110, 36–43. [Google Scholar] [CrossRef]
- Cho, K.H.; Jin, Y.H.; Kim, H.M.; Moon, H.; Koo, J.C.; Choi, H.R. Multifunctional Robotic Crawler for Inspection of Suspension Bridge Hanger Cables: Mechanism Design and Performance Validation. IEEE/ASME Trans. Mechatron. 2017, 22, 236–246. [Google Scholar] [CrossRef]
- Xu, F.; Hu, J.L.; Jiang, G. The Obstacle-Negotiation Capability of Rod-Climbing Robots and the Improved Mechanism Design. J. Mech. Sci. Technol. 2015, 29, 2975–2986. [Google Scholar] [CrossRef]
- Xu, F.; Dai, S.; Jiang, Q.; Wang, X. Developing a Climbing Robot for Repairing Cables of Cable-Stayed Bridges. Autom. Constr. 2021, 129, 103807. [Google Scholar] [CrossRef]
- Xu, F.; Wang, X.; Wang, L. Cable Inspection Robot for Cable-Stayed Bridges: Design, Analysis, and Application. J. Field Robot. 2011, 28, 441–459. [Google Scholar] [CrossRef]
- Li, J.; Yin, C.; Shi, Y.; Dai, S.; Wang, X. Circumferentially Rotatable Inspection Robot with Elastic Suspensions for Bridge Cables. Ind. Rob. 2022, 49, 981–993. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension | 434 × 389 × 310 mm |
| Outer diameter of V-shaped wheels | 78 mm |
| Outer diameter of composite wheels | 52 mm |
| Mass | 8.5 kg |
| Payload | 30 kg |
| Motor power | 120 W |
| Maximum climbing speed | 0.3 m/s |
| Obstacle-surmounting height | 20 mm |
| Pipeline diameter | 50–250 mm |
| Symbol | Meaning |
|---|---|
| Contact forces of the obstacle to the robot in x and y directions | |
| Positive pressure on the V-shaped wheels | |
| Static friction force on the V-shaped wheels | |
| Positive pressure on the composite wheels | |
| Friction force on the composite wheels | |
| Positive pressure provided by the elastic suspensions | |
| Total robot gravity | |
| Gravity of the composite wheel | |
| Moment of inertia of the composite wheels | |
| Link length of the suspension mechanisms | |
| Length of the springs | |
| Initial length of the spring | |
| Equivalent radius of the composite wheels | |
| Distance from the small V-shaped wheel center to the composite wheel center | |
| Vertical distance from Point C to the pipeline wall | |
| Gravitational constant | |
| Elastic coefficient of the springs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Huang, F.; Tu, C.; Tian, M.; Wang, X. Elastic Obstacle-Surmounting Pipeline-Climbing Robot with Composite Wheels. Machines 2022, 10, 874. https://doi.org/10.3390/machines10100874
Li J, Huang F, Tu C, Tian M, Wang X. Elastic Obstacle-Surmounting Pipeline-Climbing Robot with Composite Wheels. Machines. 2022; 10(10):874. https://doi.org/10.3390/machines10100874
Chicago/Turabian StyleLi, Jie, Feng Huang, Chunlei Tu, Mengqian Tian, and Xingsong Wang. 2022. "Elastic Obstacle-Surmounting Pipeline-Climbing Robot with Composite Wheels" Machines 10, no. 10: 874. https://doi.org/10.3390/machines10100874