
Robust Velocity and Load Observer for a General Noisy Rotating Machine
 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The original machine model is represented by a disturbed quasi-linear state-dependent model that preserves observability properties through transformations and provides the velocity and load torque as the output.
- A quasi-linear state-dependent observer structure is designed.
- Through Lyapunov analysis, the conditions to guarantee convergence to a “zone” are determined.
- Two numerical simulations and two real-time experiments are developed, showing the effectiveness of the proposed observer.
2. Problem Statement
3. Design of the SDRE Observer
- The parameterization of matrix satisfies the Lipschitz condition globally, that is, there exists such thatfor any and .The proof of this assumption can be found in Appendix A.
- The noises or disturbances are bounded:
- The gain matrices and produce a positive solution of the following state-dependent matrix equation:wherefor some positive matrices and , that is,
- The system and the observer states are bounded:Please note that assumptions 1–4 are common in the SDRE theory; in particular, they hold for the considered model, as can be verified in the proofs of assumptions 1 and 2 provided in Appendix A.
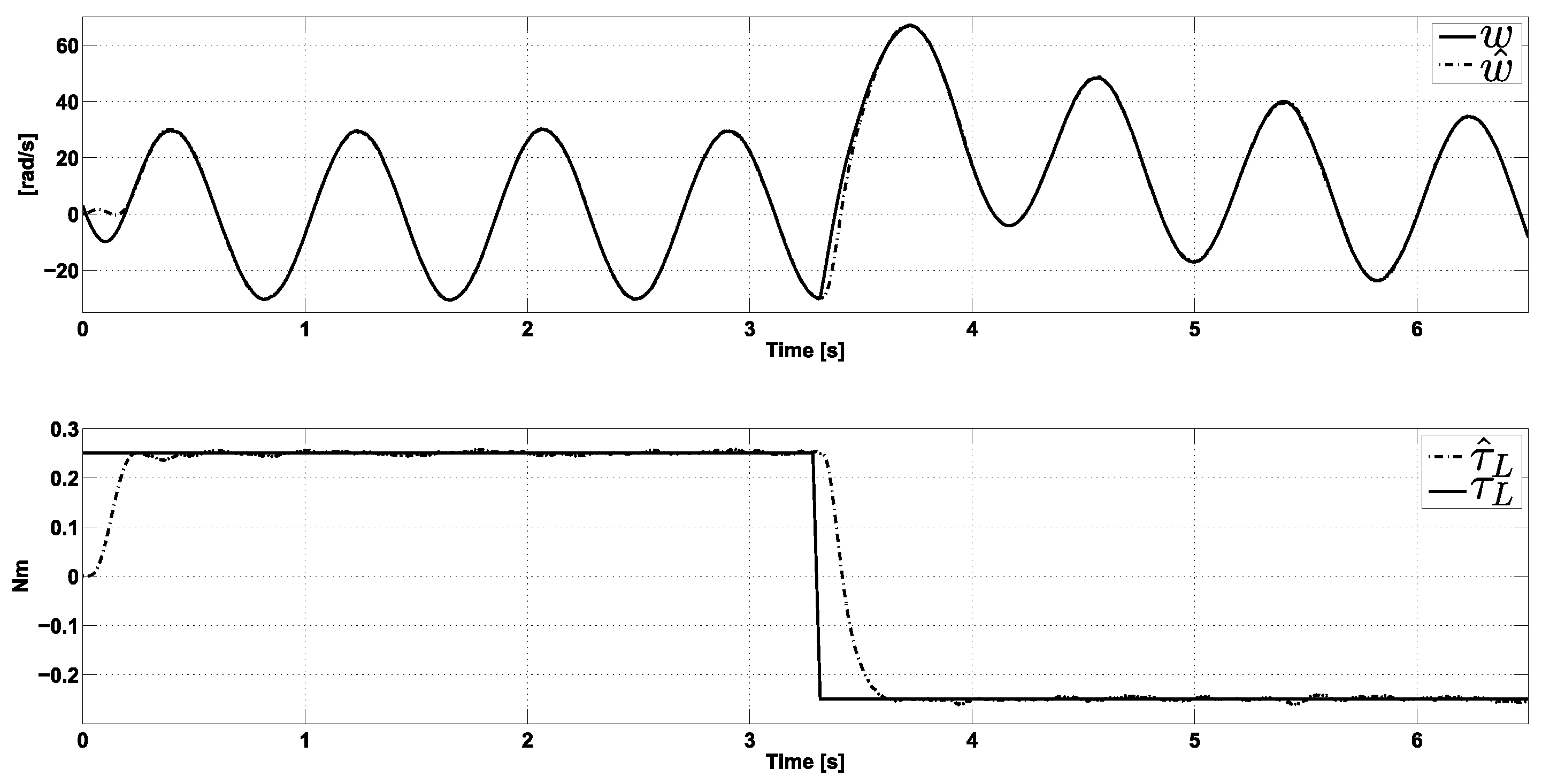
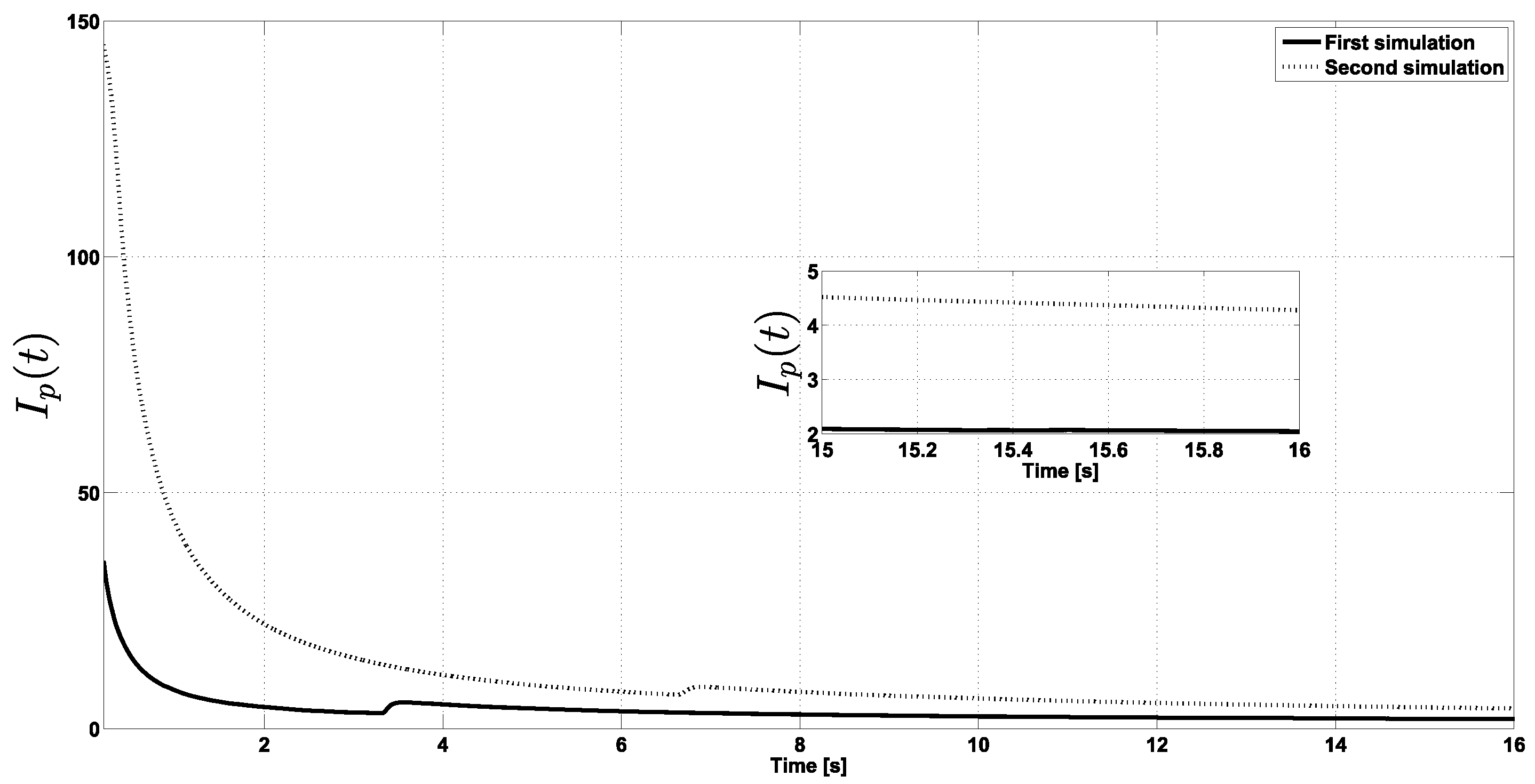
4. Numerical Simulations
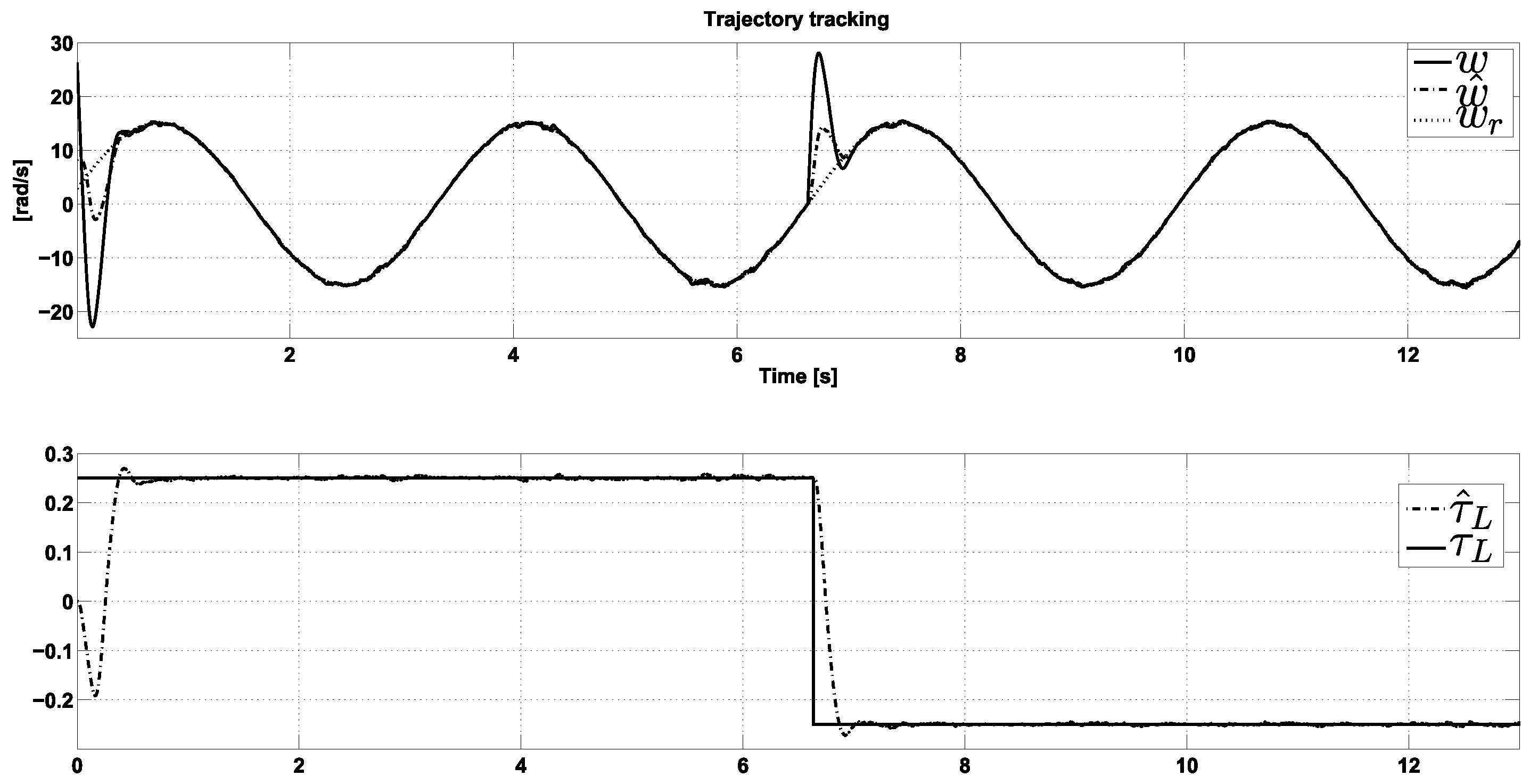
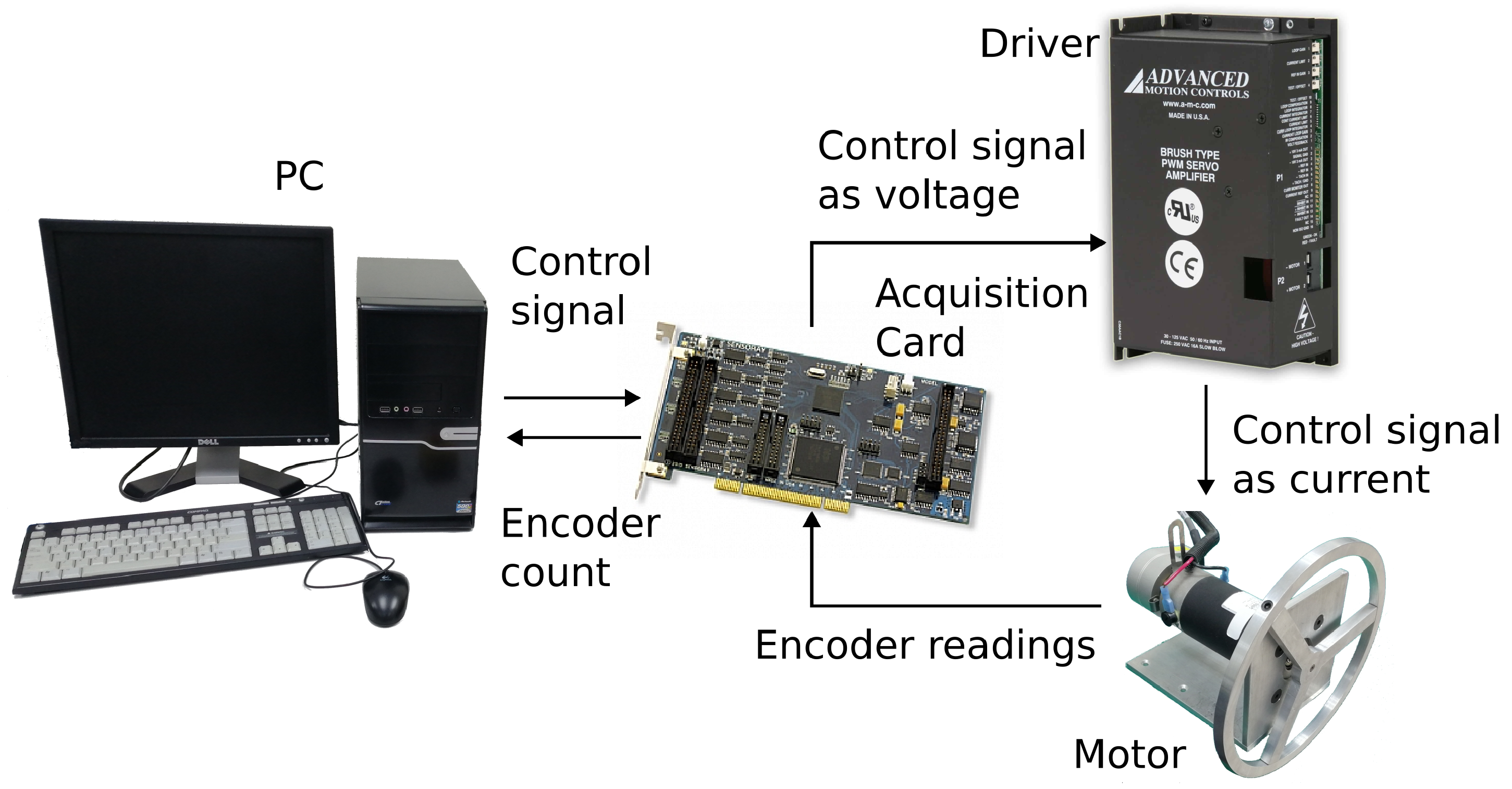
5. Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Shah, D.; Ortega, R.; Astolfi, A. Speed and load torque observer for rotating machines. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 16–18 December 2009; pp. 6143–6148. [Google Scholar]
- Chalanga, A.; Kamal, S.; Fridman, L.; Bandyopadhyay, B.; Moreno, J. How to implement Super-Twisting Controller based on sliding mode observer? In Proceedings of the 2014 13th International Workshop on Variable Structure Systems (VSS), Nantes, France, 29 June–2 July 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Naghshtabrizi, P.; Hespanha, J. Designing an observer-based controller for a network control system. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 12–15 December 2005; pp. 848–853. [Google Scholar] [CrossRef]
- Boulkroune, A.; Tadjine, M.; M’Saad, M.; Farza, M. How to design a fuzzy adaptive controller based on observers for uncertain affine nonlinear systems. Fuzzy Sets Syst. 2008, 159, 926–948. [Google Scholar] [CrossRef]
- Ley-Rosas, J.J.; González-Jiménez, L.E.; Loukianov, A.G.; Ruiz-Duarte, J.E. Observer based sliding mode controller for vehicles with roll dynamics. J. Frankl. Inst. 2019, 356, 2559–2581. [Google Scholar] [CrossRef]
- Has, Z.; Muslim, A.H.; Mardiyah, N.A. Adaptive-fuzzy-PID controller based disturbance observer for DC motor speed control. In Proceedings of the 2017 4th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Yogyakarta, Indonesia, 19–21 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ertürk, A.T.; Karabay., S.; Baynal, S.K.; Korkut, T. Vibration Noise Harshness of a Light Truck Driveshaft, Analysis and Improvement with Six Sigma Approach. Acta Phys. Pol. 2017, 131, 477–480. [Google Scholar] [CrossRef]
- DeSmidt, H.; Wang, K.; Smith, E. Coupled Torsion-Lateral Stability of a Shaft-Disk System Driven Through a Universal Joint. J. Appl. Mech. 2002, 69, 261–273. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Sira-Ramírez, H.; Yescas-Mendoza, E.; Vásquez-Sanjuan, J. A comparison between the algebraic and the reduced order observer approaches for on-line load torque estimation in a unit power factor rectifier-DC motor system. Asian J. Control 2012, 14, 45–57. [Google Scholar] [CrossRef]
- Li, B.; Goodarzi, A.; Khajepour, A.; Chen, S.k.; Litkouhi, B. An optimal torque distribution control strategy for four-independent wheel drive electric vehicles. Veh. Syst. Dyn. 2015, 53, 1172–1189. [Google Scholar] [CrossRef]
- Archela, A.; Toginho, D.G.; de Melo, L.F. Torque control of a DC motor with a state space estimator and Kalman filter for vehicle traction. In Proceedings of the 2018 13th IEEE International Conference on Industry Applications (INDUSCON), São Paulo, Brazil, 11–14 November 2018; pp. 763–769. [Google Scholar]
- Lian, C.; Xiao, F.; Gao, S.; Liu, J. Load torque and moment of inertia identification for permanent magnet synchronous motor drives based on sliding mode observer. IEEE Trans. Power Electron. 2018, 34, 5675–5683. [Google Scholar] [CrossRef]
- Archela, A.; Toginho, D.G.; de Melo, L.F. Torque Control of a DC Motor with a State Space Estimator and Kalman Filter Applied in Electrical Vehicles. In Applied Electromechanical Devices and Machines for Electric Mobility Solutions; IntechOpen: Rijeka, Croatia, 2019. [Google Scholar]
- Kumar, S.G.; Thilagar, S.H. Development of Load Torque Estimation and Passivity Based Control for DC Motor Drive Systems with Reduced Sensor Count. Emerg. Issues Sci. Technol. 2020, 3, 1–25. [Google Scholar]
- Srinivasan, G.K.; Srinivasan, H.T.; Rivera, M. Low-cost implementation of passivity-based control and estimation of load torque for a luo converter with dynamic load. Electronics 2020, 9, 1914. [Google Scholar] [CrossRef]
- Marino, R.; Tomei, P.; Verrelli, C. Adaptive control for speed-sensorless induction motors with uncertain load torque and rotor resistance. Int. J. Adapt. Control Signal Process. 2005, 19, 661–685. [Google Scholar] [CrossRef]
- Buja, G.S.; Menis, R.; Valla, M.I. Disturbance torque estimation in a sensorless DC drive. IEEE Trans. Ind. Electron. 1995, 42, 351–357. [Google Scholar] [CrossRef]
- Fabbri, S.; Nienhaus, M.; Grasso, E. Robust Load-Torque Estimation for DC Motor without Torque Sensor. In Proceedings of the 2019 AEIT International Annual Conference (AEIT), Florence, Italy, 18–20 September 2019; pp. 1–6. [Google Scholar]
- Kumar, S.G.; Thilagar, S.H. Sensorless load torque estimation and passivity based control of Buck converter fed DC motor. Sci. World J. 2015, 2015, 132843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mandriota, R.; Fabbri, S.; Nienhaus, M.; Grasso, E. Sensorless Pedalling Torque Estimation Based on Motor Load Torque Observation for Electrically Assisted Bicycles. Actuators 2021, 10, 88. [Google Scholar] [CrossRef]
- Holtz, J. Sensorless control of induction motor drives. Proc. IEEE 2002, 90, 1359–1394. [Google Scholar] [CrossRef] [Green Version]
- Loria, A.; Espinosa-Pérez, G.; Chumacero, E. A novel PID-based control approach for switched-reluctance motors. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 7626–7631. [Google Scholar]
- Ortega, R.; Praly, L.; Astolfi, A.; Lee, J.; Nam, K. Estimation of rotor position and speed of permanent magnet synchronous motors with guaranteed stability. IEEE Trans. Control Syst. Technol. 2010, 19, 601–614. [Google Scholar] [CrossRef]
- Bullinger, E.; Allgower, F. An adaptive high-gain observer for nonlinear systems. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 10 December 1997; Volume 5, pp. 4348–4353. [Google Scholar]
- Guerra, R.M.; Poznyak, A.; De Leon, V.D. Robustness property of high-gain observers for closed-loop nonlinear systems: Theoretical study and robotics control application. Int. J. Syst. Sci. 2000, 31, 1519–1529. [Google Scholar] [CrossRef]
- Nicosia, S.; Tomei, P.; Tornambé, A. A nonlinear observer for elastic robots. IEEE J. Robot. Autom. 1988, 4, 45–52. [Google Scholar] [CrossRef]
- Walcott, B.; Zak, S. State observation of nonlinear uncertain dynamical systems. IEEE Trans. Autom. Control 1987, 32, 166–170. [Google Scholar] [CrossRef]
- Ciccarella, G.; Dalla Mora, M.; Germani, A. A Luenberger-like observer for nonlinear systems. Int. J. Control 1993, 57, 537–556. [Google Scholar] [CrossRef]
- Gauthier, J.; Bornard, G. Observability for any u (t) of a class of nonlinear systems. IEEE Trans. Autom. Control 1981, 26, 922–926. [Google Scholar] [CrossRef]
- Poznyak, A.; Martinez-Guerra, R.; Osorio-Cordero, A. Robust high-gain observer for nonlinear closed-loop stochastic systems. Math. Probl. Eng. 2000, 6, 31–60. [Google Scholar] [CrossRef]
- Zeitz, M. The extended Luenberger observer for nonlinear systems. Syst. Control Lett. 1987, 9, 149–156. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Barahona-Avalos, J.L.; Sira-Ramirez, H.; Contreras-Ordaz, M.A. Robust passivity-based control of a buck–boost-converter/DC-motor system: An active disturbance rejection approach. IEEE Trans. Ind. Appl. 2012, 48, 2362–2371. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; González-Montañez, F.; Cortés-Romero, J.A.; Luviano-Juárez, A. A robust linear field-oriented voltage control for the induction motor: Experimental results. IEEE Trans. Ind. Electron. 2012, 60, 3025–3033. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Sira-Ramirez, H.; Cuevas-Lopez, E.F.; Contreras-Ordaz, M.A. Sensorless passivity based control of a DC motor via a solar powered Sepic converter-full bridge combination. J. Power Electron. 2011, 11, 743–750. [Google Scholar] [CrossRef] [Green Version]
- Davila, J.; Fridman, L.; Levant, A. Second-order sliding-mode observer for mechanical systems. IEEE Trans. Autom. Control 2005, 50, 1785–1789. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Shtessel, Y.B.; Poznyak, A.S. Parameter identification of affine time varying systems using traditional and high order sliding modes. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 2433–2438. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014; Volume 10. [Google Scholar]
- Yaz, E.; Azemi, A. Robust/adaptive observers for systems having uncertain functions with unknown bounds. In Proceedings of the 1994 American Control Conference—ACC’94, Baltimore, MD, USA, 29 June–1 July 1994; Volume 1, pp. 73–74. [Google Scholar]
- Zhu, R.; Chai, T.; Shao, C. Robust nonlinear adaptive observer design using dynamic recurrent neural networks. In Proceedings of the 1997 American Control Conference (Cat. No. 97CH36041), Albuquerque, NM, USA, 6 June 1997; Volume 2, pp. 1096–1100. [Google Scholar]
- Mracek, C.P.; Cloutier, J.R. Control designs for the nonlinear benchmark problem via the state-dependent Riccati equation method. Int. J. Robust Nonlinear Control 1998, 8, 401–433. [Google Scholar] [CrossRef]
- Liu, J.; Wang, L.; Shi, Z. Dynamic modelling of the defect extension and appearance in a cylindrical roller bearing. Mech. Syst. Signal Process. 2022, 173, 109040. [Google Scholar] [CrossRef]
- Liu, J.; Xu, Z. A simulation investigation of lubricating characteristics for a cylindrical roller bearing of a high-power gearbox. Tribol. Int. 2022, 167, 107373. [Google Scholar] [CrossRef]
- Karagiannis, D.; Astolfi, A. Observer design for a class of nonlinear systems using dynamic scaling with application to adaptive control. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2314–2319. [Google Scholar]
- Bobtsov, A.A.; Pyrkin, A.A.; Ortega, R.; Vukosavic, S.N.; Stankovic, A.M.; Panteley, E.V. A robust globally convergent position observer for the permanent magnet synchronous motor. Automatica 2015, 61, 47–54. [Google Scholar] [CrossRef]
- Çimen, T. State-dependent Riccati equation (SDRE) control: A survey. IFAC Proc. Vol. 2008, 41, 3761–3775. [Google Scholar] [CrossRef] [Green Version]
- Beikzadeh, H.; Taghirad, H.D. Exponential nonlinear observer based on the differential state-dependent Riccati equation. Int. J. Autom. Comput. 2012, 9, 358–368. [Google Scholar] [CrossRef]
- Çimen, T. Systematic and effective design of nonlinear feedback controllers via the state-dependent Riccati equation (SDRE) method. Annu. Rev. Control 2010, 34, 32–51. [Google Scholar] [CrossRef]
- Haessig, D.A.; Friedland, B. State dependent differential Riccati equation for nonlinear estimation and control. IFAC Proc. Vol. 2002, 35, 405–410. [Google Scholar] [CrossRef] [Green Version]
- Moreno-Valenzuela, J.; Campa, R.; Santibáñez, V. Model-based control of a class of voltage-driven robot manipulators with non-passive dynamics. Comput. Electr. Eng. 2013, 39, 2086–2099. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguilar-Ibanez, C.; Jimenez-Lizarraga, M.A.; Gandarilla-Esparza, I.; Moreno-Valenzuela, J.; Saldivar, B.; Suarez-Castanon, M.S.; Rubio, J.d.J. Robust Velocity and Load Observer for a General Noisy Rotating Machine. Machines 2022, 10, 1009. https://doi.org/10.3390/machines10111009
Aguilar-Ibanez C, Jimenez-Lizarraga MA, Gandarilla-Esparza I, Moreno-Valenzuela J, Saldivar B, Suarez-Castanon MS, Rubio JdJ. Robust Velocity and Load Observer for a General Noisy Rotating Machine. Machines. 2022; 10(11):1009. https://doi.org/10.3390/machines10111009
Chicago/Turabian StyleAguilar-Ibanez, Carlos, Manuel A. Jimenez-Lizarraga, Isaac Gandarilla-Esparza, Javier Moreno-Valenzuela, Belem Saldivar, Miguel S. Suarez-Castanon, and Jose de Jesus Rubio. 2022. "Robust Velocity and Load Observer for a General Noisy Rotating Machine" Machines 10, no. 11: 1009. https://doi.org/10.3390/machines10111009