
Research on Energy Consumption Generation Method of Fuel Cell Vehicles: Based on Naturalistic Driving Data Mining


Abstract
:1. Introduction
1.1. Literature Review
1.2. Motivations and Contributions
2. Research Methods
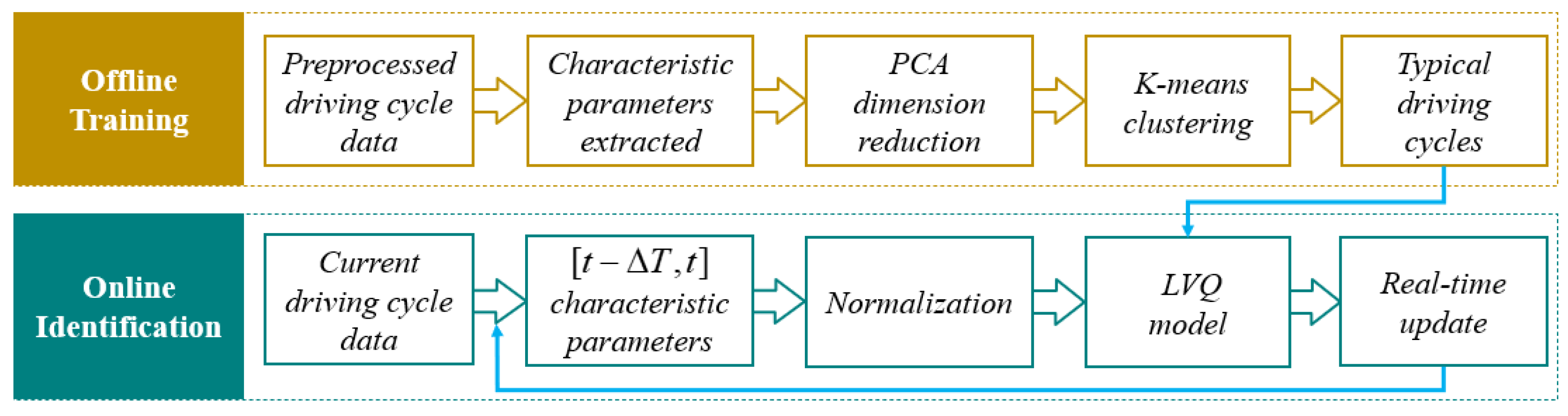
2.1. Methods Description
2.2. Collecting and Preprocessing of the Naturalistic Driving Data
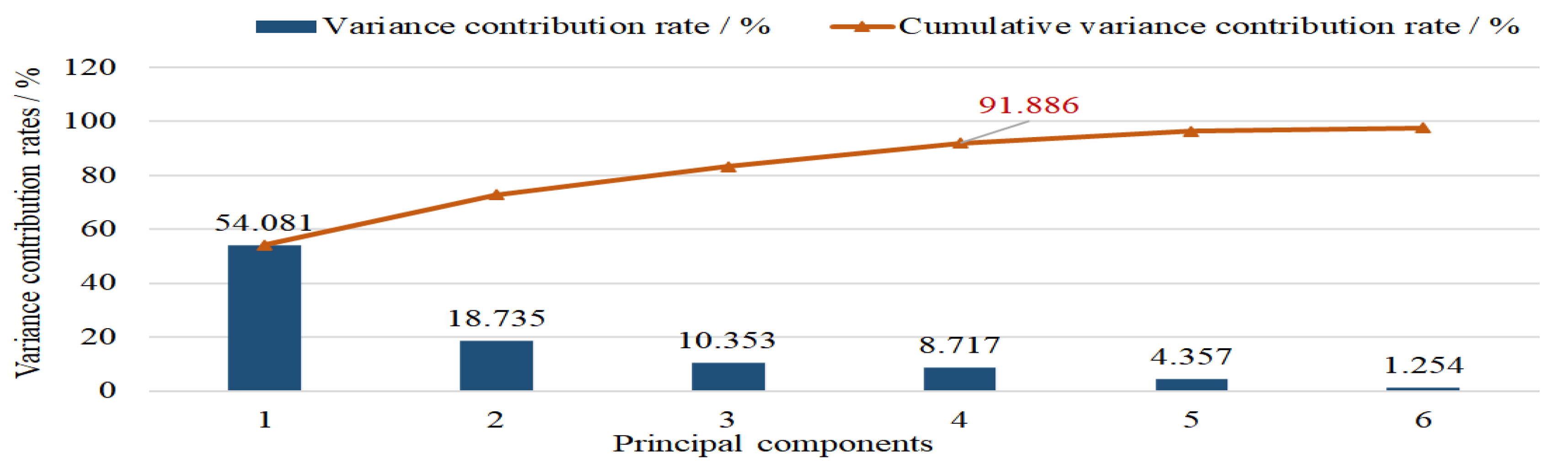
2.3. Analysis and Dimension Reduction of Characteristic Parameters
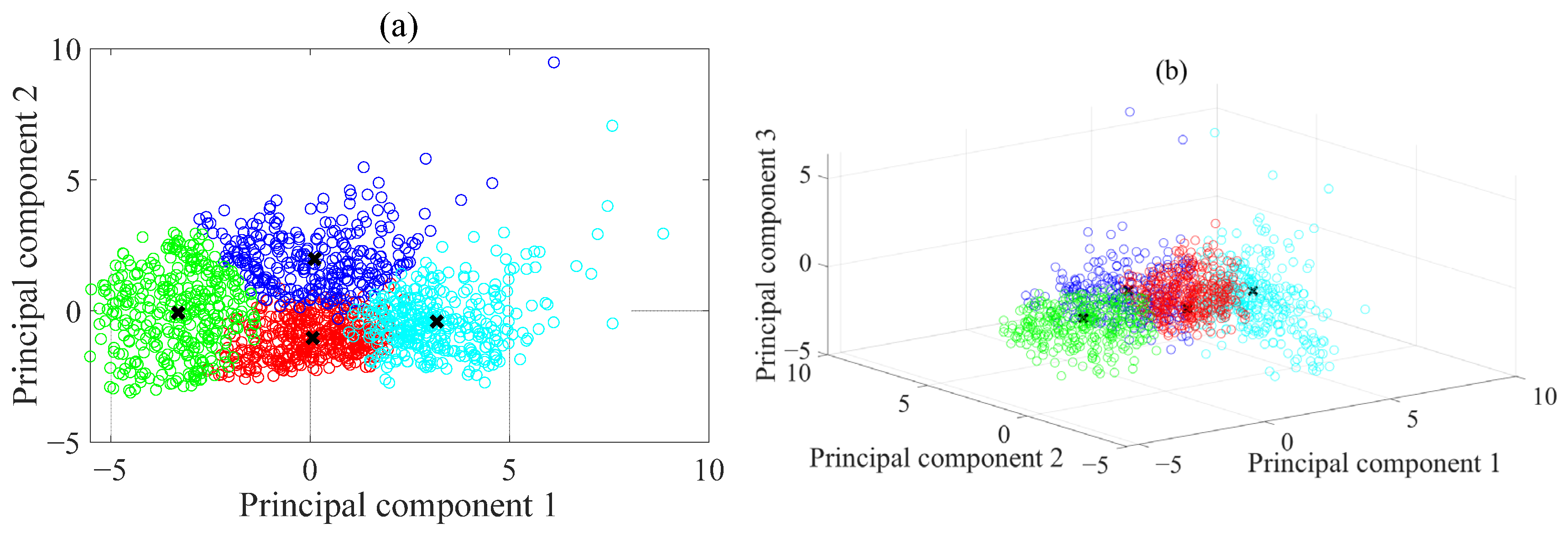
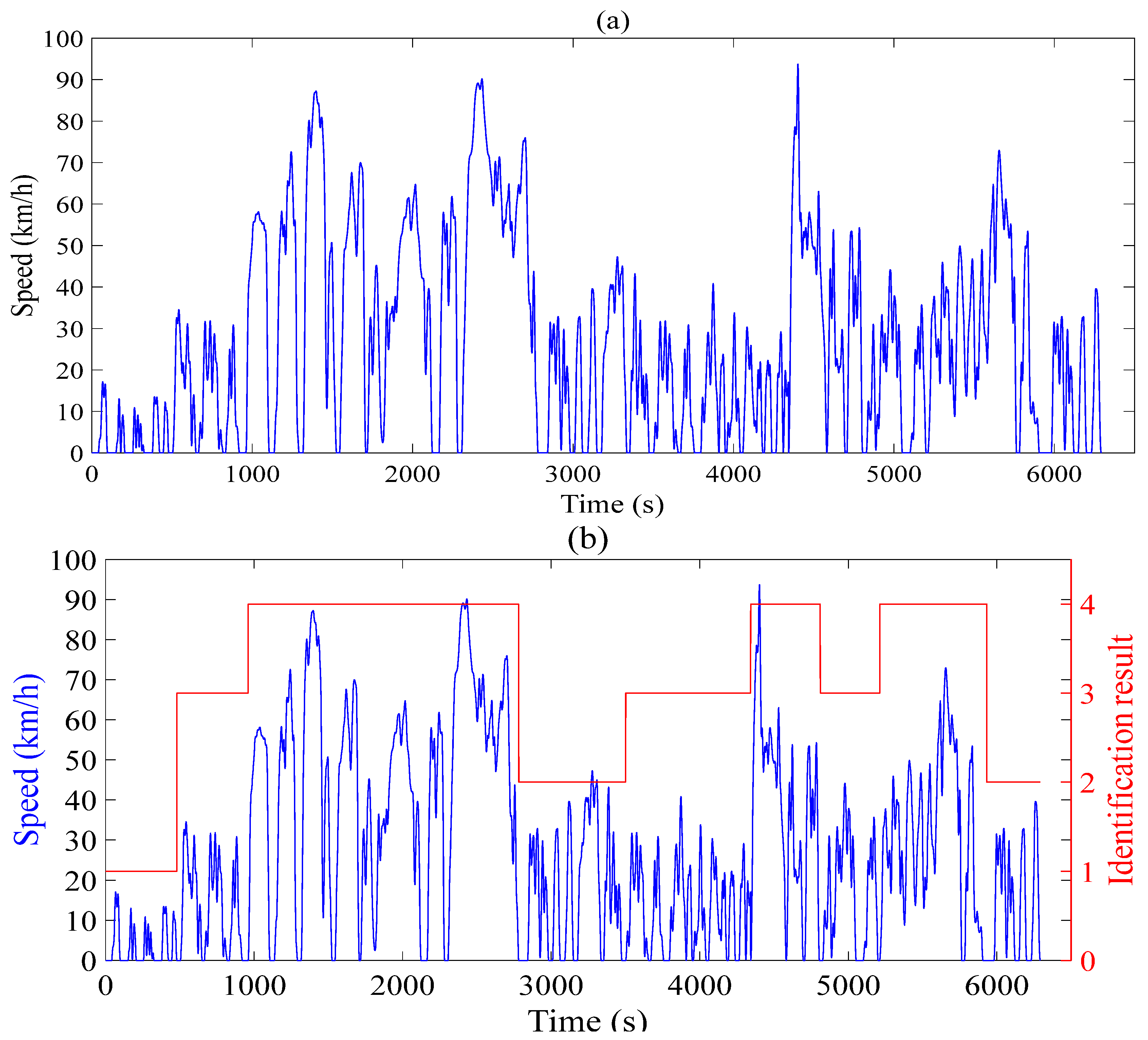
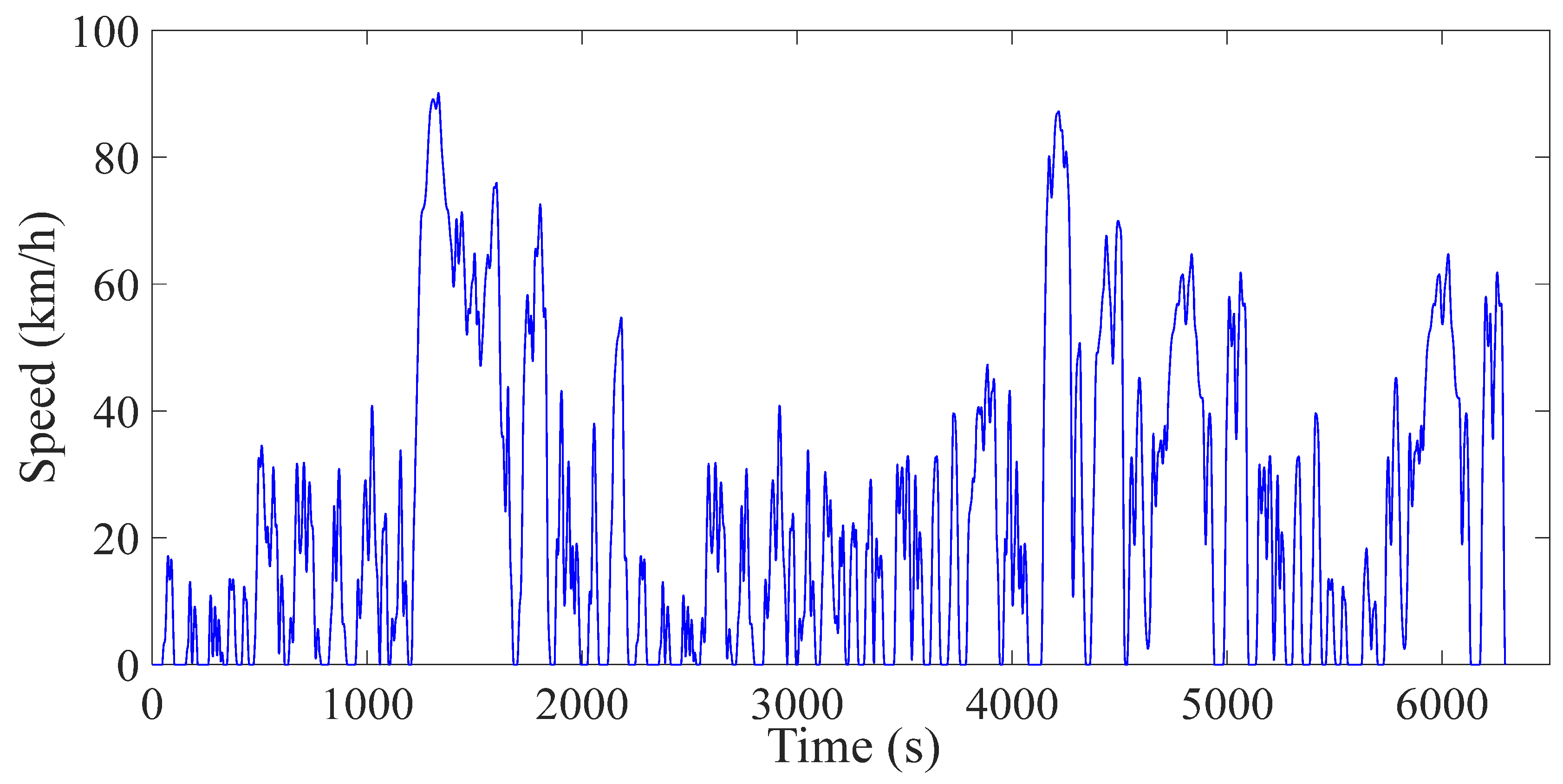
2.4. Acquisition and Identification of Typical Driving Cycles
3. Energy Consumption Generation Method
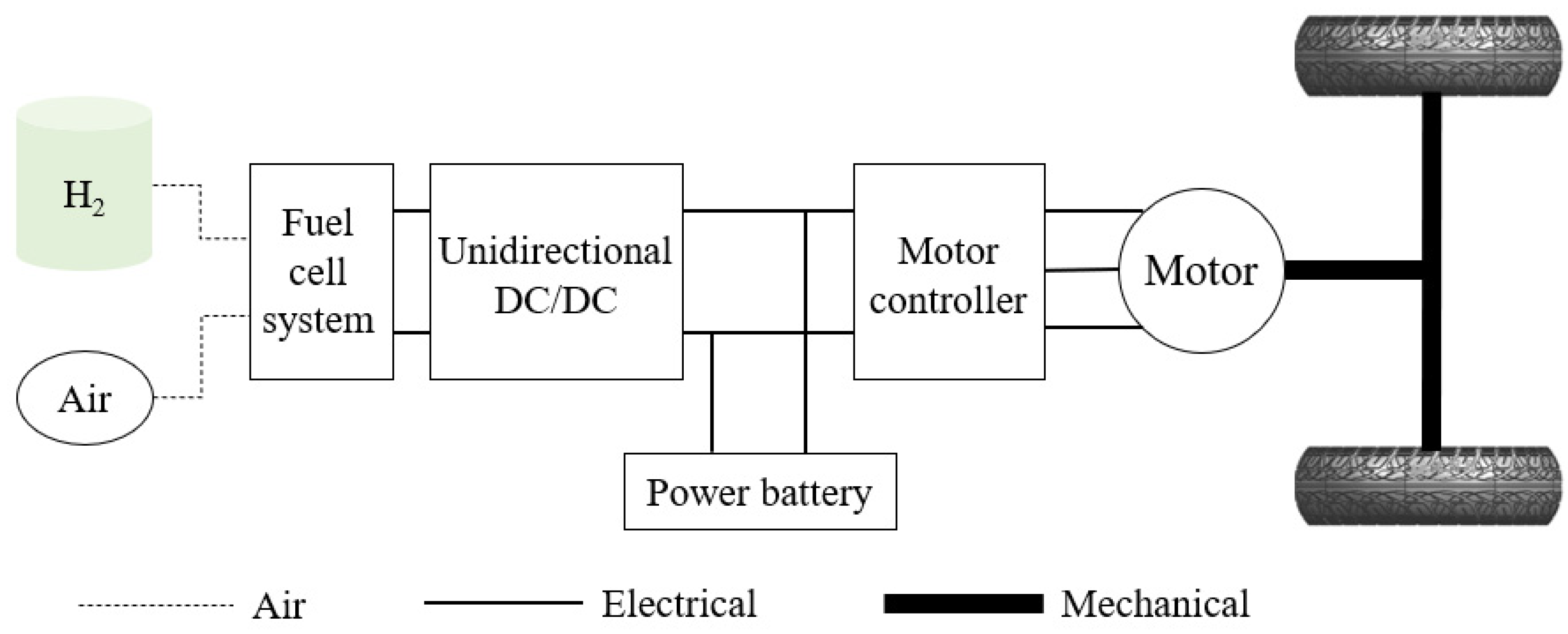
3.1. Vehicle and Powertrain Model
3.1.1. Vehicle Dynamics Model
3.1.2. Motor Model
3.1.3. Fuel Cell System Model
3.1.4. Battery Model
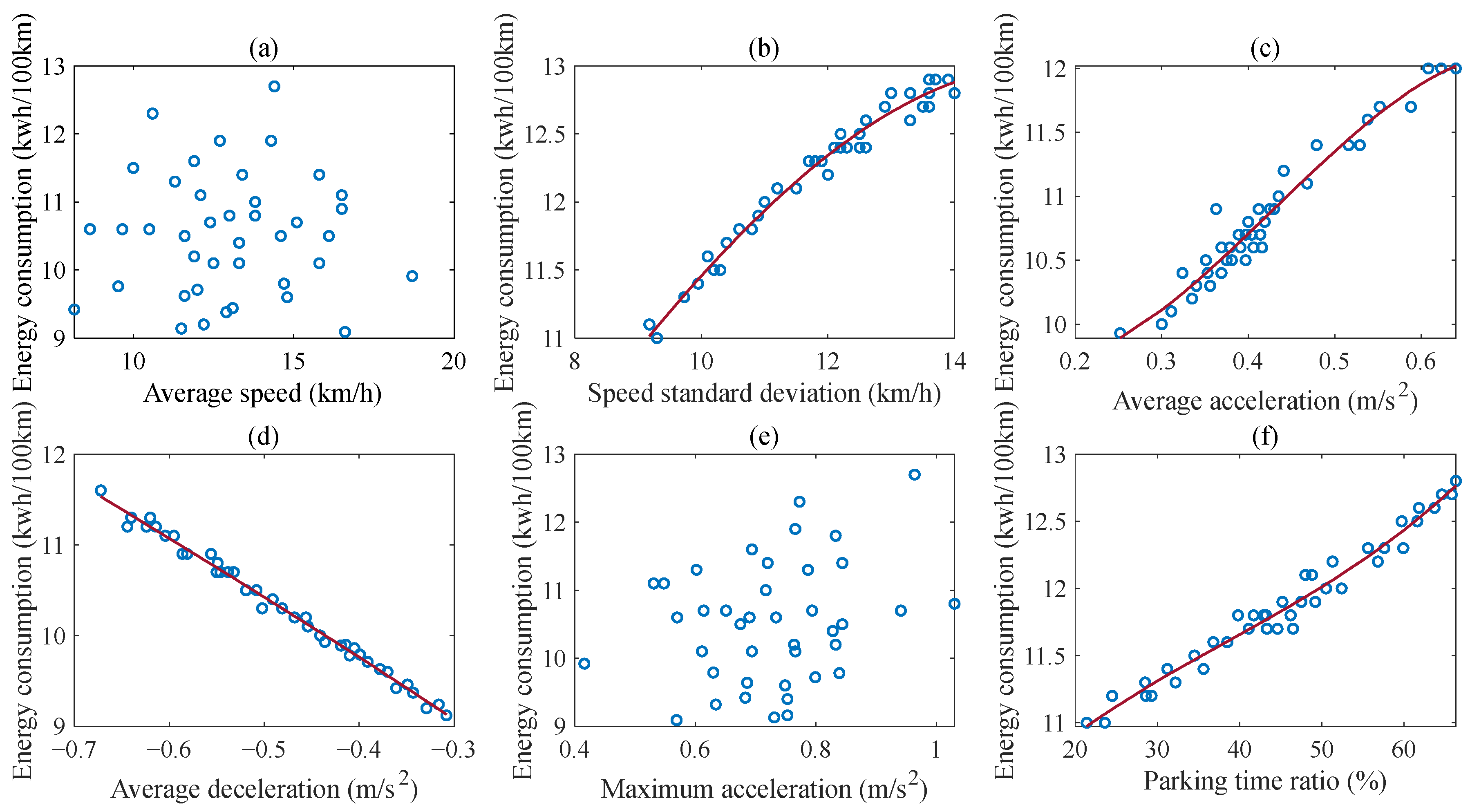
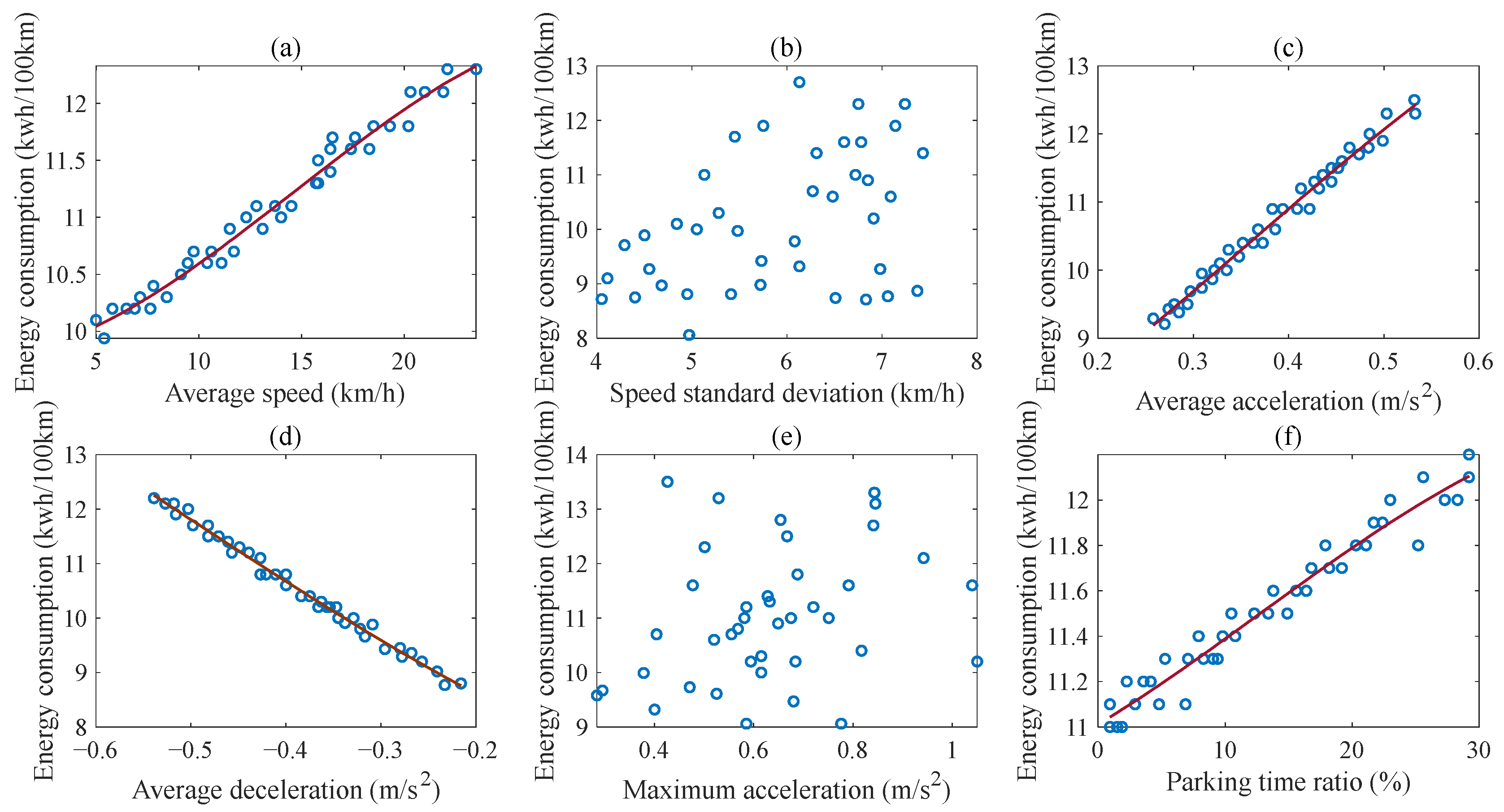
3.2. Energy Consumption Correlation Analysis
3.3. Energy Consumption Generation Method
3.4. Simulation and Results
4. Discussion
- We have analyzed the three steps of naturalistic driving data mining (i.e., collecting and preprocessing of the naturalistic driving data, analysis and dimension reduction of characteristic parameters, and acquisition and identification of typical driving cycles), and four typical driving cycles representing driver driving are obtained, which, respectively, represented the congested roads in urban areas, relatively unobstructed roads in urban areas, unobstructed roads in urban areas, and expressways in urban areas.
- Characteristic parameters of various typical driving cycles are found to be related to the energy consumption of FCVs by means of a regression analysis. The parameter of maximum acceleration is not related to the energy consumption under any typical driving cycles, which is similar in nature to the eco-driving rules stipulated in previous studies [45,46]. Based on the related driving cycle characteristic parameters, an energy consumption generation method is designed and proposed to estimate the energy consumption of FCVs, which can provide a reference for the subsequent design of eco-driving rules.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FCV | Fuel Cell Vehicle |
| PHEV | Plug-in Hybrid Electric Vehicle |
| BEV | Battery Electric Vehicle |
| ICEV | Internal Combustion Engine Vehicle |
| GPS | Global Positioning System |
| ITS | Intelligent transportation system |
| PCA | Principal Component Analysis |
| LVQ | Learning Vector Quantization |
| SOC | State of Charge |
References
- Luo, Y.; Wu, Y.H.; Li, B.; Mo, T.D.; Li, Y.; Feng, S.P.; Qu, J.K.; Chu, P.K. Development and application of fuel cells in the automobile industry. J. Energy Storage 2021, 42, 103124. [Google Scholar] [CrossRef]
- Wang, P.Y.; Ma, Y.Y.; Li, J.H.; Gao, Y.K.; Zhang, Y.R.; Ma, D.H. A Novel Control Algorithm of the Air Supply Subsystem: Based on Dynamic Modeling of Proton Exchange Membrane Fuel Cell. Processes 2022, 10, 1499. [Google Scholar] [CrossRef]
- Bethoux, O. Hydrogen Fuel Cell Road Vehicles: State of the Art and Perspectives. Energies 2020, 13, 5843. [Google Scholar] [CrossRef]
- Montero-Sousa, J.A.; Alaiz-Moreton, H.; Quintian, H.; Gonzalez-Ayuso, T.; Novais, P.; Calvo-Rolle, J.L. Hydrogen consumption prediction of a fuel cell based system with a hybrid intelligent approach. Energy 2020, 205, 117986. [Google Scholar] [CrossRef]
- Duan, Z.J.; Mei, N.; Hong, J.C.; Feng, L.L.; Yu, S.G.; Jiang, Z.Y.; Chen, D.F.; Xu, X.M. Research on Hydrogen Consumption and Driving Range of Hydrogen Fuel Cell Vehicle under the CLTC-P Condition. World Electr. Veh. J. 2022, 13, 9. [Google Scholar] [CrossRef]
- Wang, H.W.; Zhang, X.B.; Ouyang, M.G. Energy consumption of electric vehicles based on real-world driving patterns: A case study of Beijing. Appl. Energy 2015, 157, 710–719. [Google Scholar] [CrossRef]
- Xie, H.M.; Tian, G.Y.; Chen, H.X.; Wang, J.; Huang, Y. A distribution density-based methodology for driving data cluster analysis: A case study for an extended-range electric city bus. Pattern Recogn. 2018, 73, 131–143. [Google Scholar] [CrossRef]
- Wang, P.Y.; Li, J.K.; Yu, Y.B.; Xiong, X.Y.; Zhao, S.J.; Shen, W.S. Energy management of plug-in hybrid electric vehicle based on trip characteristic prediction. J. Automob. Eng. 2020, 234, 2239–2259. [Google Scholar] [CrossRef]
- Ma, Y.Y.; Wang, P.Y.; Sun, T.J. Research on Energy Management Method of Plug-In Hybrid Electric Vehicle Based on Travel Characteristic Prediction. Energies 2021, 14, 6134. [Google Scholar] [CrossRef]
- Chlopek, Z.; Lasocki, J.; Wojcik, P.; Badyda, A.J. Experimental investigation and comparison of energy consumption of electric and conventional vehicles due to the driving pattern. Int. J. Green Energy 2018, 15, 773–779. [Google Scholar] [CrossRef]
- Xie, Y.K.; Li, Y.Y.; Zhao, Z.C.; Dong, H.; Wang, S.Q.; Liu, J.P.; Guan, J.H.; Duan, X.B. Microsimulation of electric vehicle energy consumption and driving range. Appl. Energy 2020, 267, 115081. [Google Scholar] [CrossRef]
- Mamarikas, S.; Doulgeris, S.; Samaras, Z.; Ntziachristos, L. Traffic impacts on energy consumption of electric and conventional vehicles. Transp. Res. Part D Transp. Environ. 2022, 105, 103231. [Google Scholar] [CrossRef]
- Fiori, C.; Arcidiacono, V.; Fontaras, G.; Makridis, M.; Mattas, K.; Marzano, V.; Thiel, C.; Ciuffo, B. The effect of electrified mobility on the relationship between traffic conditions and energy consumption. Transp. Res. Part D Transp. Environ. 2019, 67, 275–290. [Google Scholar] [CrossRef]
- Grube, T.; Stolten, D. The Impact of Drive Cycles and Auxiliary Power on Passenger Car Fuel Economy. Energies 2018, 11, 1010. [Google Scholar] [CrossRef] [Green Version]
- Ye, K.L.; Li, P.Q.; Li, H. Optimization of Hybrid Energy Storage System Control Strategy for Pure Electric Vehicle Based on Typical Driving Cycle. Math. Probl. Eng. 2020, 2020, 1365195. [Google Scholar] [CrossRef]
- Wang, L.; Ma, J.; Zhao, X.; Li, X.B. Development of a Typical Urban Driving Cycle for Battery Electric Vehicles Based on Kernel Principal Component Analysis and Random Forest. IEEE Access 2021, 9, 15053–15065. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, J.Y.; Qing, T.; Li, X.Y.; Wang, Z.Z. Energy consumption analysis of a parallel PHEV with different configurations based on a typical driving cycle. Energy Rep. 2021, 7, 254–265. [Google Scholar] [CrossRef]
- Mamala, J.; Smieja, M.; Praznowski, K. Analysis of the Total Unit Energy Consumption of a Car with a Hybrid Drive System in Real Operating Conditions. Energies 2021, 14, 3966. [Google Scholar] [CrossRef]
- Shi, S.M.; Zhang, M.; Lin, N.; Yue, B.J. Low-Cost Reconstruction of Typical Driving Cycles Based on Empirical Information and Low-Frequency Speed Data. IEEE Trans. Veh. Technol. 2020, 69, 8221–8231. [Google Scholar] [CrossRef]
- Pei, L.H.; Cao, Y.; Kang, Y.; Xu, Z.Y.; Zhao, Z.Y. UJ-FLAC: Unsupervised Joint Feature Learning and Clustering for Dynamic Driving Cycles Construction. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10970–10982. [Google Scholar] [CrossRef]
- Li, X.F.; Zhang, Q.; Peng, Z.L.; Wang, A.N.; Wang, W.Y. A data-driven two-level clustering model for driving pattern analysis of electric vehicles and a case study. J. Clean. Prod. 2018, 206, 827–837. [Google Scholar] [CrossRef]
- Zhao, X.; Yu, Q.; Ma, J.; Wu, Y.; Yu, M.; Ye, Y.M. Development of a Representative EV Urban Driving Cycle Based on a k-Means and SVM Hybrid Clustering Algorithm. J. Adv. Transp. 2018, 2018, 1890753. [Google Scholar] [CrossRef]
- Peng, Y.H.; Zhuang, Y.; Yang, Y.H. A driving cycle construction methodology combining k-means clustering and Markov model for urban mixed roads. J. Automob. Eng. 2020, 234, 714–724. [Google Scholar] [CrossRef]
- Wu, C.Z.; Sun, C.; Chu, D.F.; Huang, Z.; Ma, J.; Li, H.R. Clustering of Several Typical Behavioral Characteristics of Commercial Vehicle Drivers Based on GPS Data Mining Case Study of Highways in China. Transp. Res. Rec. 2016, 2581, 154–163. [Google Scholar] [CrossRef]
- Yan, W.; Li, M.J.; Zhong, Y.C.; Qu, C.Y.; Li, G.X. A Novel k-MPSO Clustering Algorithm for the Construction of Typical Driving Cycles. IEEE Access 2020, 8, 64028–64036. [Google Scholar] [CrossRef]
- Lois, D.; Wang, Y.; Boggio-Marzet, A.; Monzon, A. Multivariate analysis of fuel consumption related to eco-driving: Interaction of driving patterns and external factors. Transp. Res. Part D Transp. Environ. 2019, 72, 232–242. [Google Scholar] [CrossRef]
- Yan, X.D.; Allison, C.; Fleming, J.; Stanton, N.; Lot, R. The Benefit of Assisted and Unassisted Eco-Driving for Electrified Powertrains. IEEE Trans. Hum. -Mach. Syst. 2021, 51, 403–407. [Google Scholar] [CrossRef]
- Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability 2021, 13, 226. [Google Scholar] [CrossRef]
- Zhou, M.; Jin, H.; Wang, W.S. A review of vehicle fuel consumption models to evaluate eco-driving and eco-routing. Transp. Res. Part D Transp. Environ. 2017, 49, 203–218. [Google Scholar] [CrossRef]
- He, H.L.; Liu, D.; Lu, X.Y.; Xu, J.C. ECO Driving Control for Intelligent Electric Vehicle with Real-Time Energy. Electronics 2021, 10, 2613. [Google Scholar] [CrossRef]
- Günther, M.; Kacperski, C.; Krems, J.F. Can electric vehicle drivers be persuaded to eco-drive? A field study of feedback, gamification and financial rewards in Germany. Energy Res. Soc. Sci. 2019, 63, 101407. [Google Scholar] [CrossRef]
- Yang, H.; Almutairi, F.; Rakha, H. Eco-Driving at Signalized Intersections: A Multiple Signal Optimization Approach. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2943–2945. [Google Scholar] [CrossRef] [Green Version]
- Yuan, W.C.; Frey, C.; Wei, T.C. Fuel use and emission rates reduction potential for light-duty gasoline vehicle eco-driving. Transp. Res. Part D Transp. Environ. 2022, 109, 103394. [Google Scholar] [CrossRef]
- Xu, Z.G.; Wei, T.; Easa, S.; Zhao, X.M.; Qu, X.B. Modeling Relationship between Truck Fuel Consumption and Driving Behavior Using Data from Internet of Vehicles. Comput. -Aided Civ. Infrastruct. Eng. 2018, 33, 209–219. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Zhao, X.H.; Liu, C.; Rong, J.; Zhang, Y.L.; Dong, Z.N.; Su, Y.L. Vehicle fuel consumption prediction method based on driving behavior data collected from smartphones. J. Adv. Transp. 2020, 2020, 9263605. [Google Scholar] [CrossRef]
- Tkachenko, R.; Izonin, I.; Kryvinska, N.; Dronyuk, I.; Zub, K. An Approach towards Increasing Prediction Accuracy for the Recovery of Missing IoT Data based on the GRNN-SGTM Ensemble. Sensors 2020, 20, 2625. [Google Scholar] [CrossRef] [PubMed]
- Zhao, M.R.; Gao, H.N.; Han, Q.; Ge, J.A.; Wang, W.; Qu, J. Development of a Driving Cycle for Fuzhou Using K-Means and AMPSO. J. Adv. Transport. 2021, 2021, 5430137. [Google Scholar] [CrossRef]
- Guo, S.Q.; Wu, K.K.; Zhang, G.Q. Application of PCA-K-means++ combination model to construction of light vehicle driving conditions in intelligent traffic. J. Meas. Eng. 2020, 8, 107–121. [Google Scholar] [CrossRef]
- Liu, Y.G.; Wang, J.M.; Zhao, P.; Qin, D.T.; Chen, Z. Research on Classification and Recognition of Driving Styles Based on Feature Engineering. IEEE Access 2019, 7, 89245–89255. [Google Scholar] [CrossRef]
- Liu, B.; Sun, C.; Wang, B.; Liang, W.Q.; Ren, Q.; Li, J.Q.; Sun, F.C. Bi-level convex optimization of eco-driving for connected Fuel Cell Hybrid Electric Vehicles through signalized intersections. Energy 2022, 252, 123956. [Google Scholar] [CrossRef]
- Wei, X.D.; Leng, J.H.; Sun, C.; Huo, W.W.; Ren, Q.; Sun, F.C. Co-optimization method of speed planning and energy management for fuel cell vehicles through signalized intersections. J. Power Source 2022, 518, 230598. [Google Scholar] [CrossRef]
- Du, C.Q.; Huang, S.Y.; Jiang, Y.Y.; Wu, D.M.; Li, Y. Optimization of Energy Management Strategy for Fuel Cell Hybrid Electric Vehicles Based on Dynamic Programming. Energies 2022, 15, 4325. [Google Scholar] [CrossRef]
- Zhou, J.M.; Feng, C.X.; Su, Q.Q.; Jiang, S.F.; Fan, Z.X.; Ruan, J.G.; Sun, S.K.; Hu, L.L. The Multi-Objective Optimization of Powertrain Design and Energy Management Strategy for Fuel Cell-Battery Electric Vehicle. Sustainability 2022, 14, 6320. [Google Scholar] [CrossRef]
- Zhao, X.; Ma, J.; Wang, S.; Ye, Y.M.; Wu, Y.; Yu, M. Developing an electric vehicle urban driving cycle to study differences in energy consumption. Environ. Sci. Pollut. Res. 2019, 26, 13839–13853. [Google Scholar] [CrossRef]
- Chrenko, D. Influence of hybridisation on eco-driving habits using realistic driving cycles. IET Intell. Transp. Syst. 2015, 9, 498–504. [Google Scholar] [CrossRef]
- Coloma, J.F.; Garcia, M.; Wang, Y.; Monzon, A. Green Eco-Driving Effects in Non-Congested Cities. Sustainability 2018, 10, 28. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | No. | Characteristic Parameters | Symbol | Unit |
|---|---|---|---|---|
| Speed-type parameters | 1 | Average speed | km/h | |
| 2 | Average driving speed | km/h | ||
| 3 | Maximum speed | km/h | ||
| 4 | Standard deviation of vehicle speed | km/h | ||
| Acceleration-type parameters | 5 | Average acceleration | m/s2 | |
| 6 | Average deceleration | m/s2 | ||
| 7 | Maximum acceleration | m/s2 | ||
| 8 | Maximum deceleration | m/s2 | ||
| 9 | Standard deviation of acceleration | m/s2 | ||
| 10 | Standard deviation of deceleration | m/s2 | ||
| Statistics-type parameters | 11 | Parking time ratio | % | |
| 12 | Acceleration time ratio | % | ||
| 13 | Deceleration time ratio | % | ||
| 14 | Constant speed time ratio | % |
| Description | Parameters | Value |
|---|---|---|
| Basic parameters of the vehicle | Vehicle mass/kg | 1500 |
| Frontal area/m2 | 2.27 | |
| Air resistance coefficient | 0.28 | |
| Rolling radius/m | 0.327 | |
| Power battery | Capacity/A·h | 40 |
| Rated voltage/V | 320 | |
| Fuel cell | Peak output power/kW | 15 |
| Typical Driving Cycles | Characteristic Parameters |
|---|---|
| 1 | , , , |
| 2 | , , , |
| 3 | , , , |
| 4 | , , , , |
| FCV Energy Consumption Generation Method under Real Driving Cycle | |
|---|---|
| 1 | Identifying the driving segments belonging to typical driving cycle 1; Calculating the characteristic parameters and the corresponding mileage . |
| 2 | The actual energy consumption of typical driving cycle 1 can be calculated by: . |
| 3 | Identifying the driving segments belonging to typical driving cycle 2; Calculating the characteristic parameters . |
| 4 | The actual energy consumption of typical driving cycle 2 can be calculated by: . |
| 5 | Identifying the driving segments belonging to typical driving cycle 3; Calculating the characteristic parameters . |
| 6 | The actual energy consumption of typical driving cycle 3 can be calculated by: . |
| 7 | Identifying the driving segments belonging to typical driving cycle 4; Calculating the characteristic parameters . |
| 8 | The actual energy consumption of typical driving cycle 4 can be calculated by: . |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Wang, P.; Li, B.; Li, J. Research on Energy Consumption Generation Method of Fuel Cell Vehicles: Based on Naturalistic Driving Data Mining. Machines 2022, 10, 1047. https://doi.org/10.3390/machines10111047
Ma Y, Wang P, Li B, Li J. Research on Energy Consumption Generation Method of Fuel Cell Vehicles: Based on Naturalistic Driving Data Mining. Machines. 2022; 10(11):1047. https://doi.org/10.3390/machines10111047
Chicago/Turabian StyleMa, Yangyang, Pengyu Wang, Bin Li, and Jianhua Li. 2022. "Research on Energy Consumption Generation Method of Fuel Cell Vehicles: Based on Naturalistic Driving Data Mining" Machines 10, no. 11: 1047. https://doi.org/10.3390/machines10111047