1. Introduction
Modern voltage source rectifiers (VSR) with pulse width modulation (PWM) possess several merits, including the possibility of bidirectional power exchange, power factor adjustment and sinusoidal current waveforms [
1,
2,
3,
4]. In areas of the ac-dc converters, simple diode rectifiers without PWM operation had been popularly employed instead of the ac-dc converter with PWM techniques. However, recently, PWM converters for ac-dc power conversion have started to be widely used in the applications of renewable energy and other industrial fields, due to their ability to provide bi-directional power flow. Typically, two extensively studied methods for controlling PWM rectifiers are direct power control (DPC) [
5] and voltage-oriented control (VOC) [
6]. VOC techniques obtain optimal performance by employing a proportional-integral (PI) controller in a synchronously rotating frame to control grid currents. Meanwhile, in DPC, power controllers are employed. Prior to implementation, predefined selection rules or lookup tables must be devised based on instantaneous power characteristics. The optimal switching state is decided by assessing the actual and reference values of active and reactive powers [
7,
8]. DPC has the merits of quick, dynamic performance while maintaining simplicity and robustness.
Because of its advantageous ability to address nonlinear control challenges, model predictive control (MPC) has captured the interest of researchers in academia as a promising method in areas of power electronics. While widespread industrial implementations of this approach are currently limited, the advancement of robust processors has enabled its potential for extensive use in power converters and electric drives. In terms of MPC approaches, Finite-Control-Set MPC (FCS-MPC) exhibits greater flexibility in managing constraints and can attain superior overall performance in addressing various control targets. This includes conflicts such as balancing performance in steady-state with low switching frequency operation. Regarding MPC methods applied to PWM rectifiers, they can be classified according to VOC and DPC techniques, including model predictive current control (MPCC) [
9], model predictive virtual flux control (MPVFC) [
8,
10], model predictive direct power control (MPDPC) [
9,
11], and model predictive virtual flux direct power control (MPVFDPC) [
7,
12]. Despite sharing the prediction concept, these approaches utilize proper cost functions to obtain diverse performances, especially under conditions of distorted source voltage states.
When PWM rectifiers operate in medium-to-high-power areas, control methods to decrease losses are required to realize high efficiency. For an excellent modulation strategy, it is crucial to emphasize not only simplicity in implementation but also the reduction of switching loss. Meeting the demands of high-efficiency and high-power density applications requires the minimization of switching loss. Comparatively, discontinuous pulse-width modulation (DPWM) schemes are favored options as they involve keeping one phase leg consistently clamped to the points of the DC link without engaging in switching actions. This results in a substantial reduction in switching loss. DPWM can be implemented based on CBPWM or SVPWM. Switching losses of the three-phase power converters can be decreased by using offset signals added to the reference signals in the VOC technique, resulting in the creation of DPWMs [
13,
14]. Clamping a phase leg of a PWM converter to the positive or negative dc-busbar can increase power efficiency under conditions with varying power factors. However, the DPWM technique can lead to a decline in the performance of the PWM rectifier. Due to the feature of including multiple control variables at the same time in a cost function, these MPC schemes can minimize switching loss thanks to additional terms associated with switching frequency or power loss [
15,
16]. Nevertheless, these methods necessitate an appropriate weighting factor selection to ensure the control objective. Optimal switching sequence and preselected switching states are employed in [
17,
18,
19] to minimize the switching loss in the PWM rectifier. The work in [
20] reduces the switching frequency by using two voltage vectors during every sampling period, but this approach requires much calculation for the optimal duration of each vector. Regarding the operation of a PWM rectifier in a distorted grid voltage state, the MPVFC in [
8] can lessen the distortion of grid currents. In [
21], a novel formulation of instantaneous reactive power is proposed to be employed in the cost function to address the challenge posed by severely distorted grid currents due to the presence of distorted grid voltage states. A cascaded delayed signal cancellation block is introduced in [
22] to acquire the fundamental component of the converter voltages. Consequently, the grid-voltage sensorless method using the virtual flux is capable of functioning in conditions of unbalanced and distorted grid voltages. Evidently, the indicated MPC approaches cannot address both the minimization of switching loss and ensuring proper functioning under distorted grid voltage states.
Based on the preceding analysis, it is crucial to develop a control scheme that can meet the fundamental control objectives of sinusoidal grid current and regulated DC bus voltage. Simultaneously, minimization of switching loss and proper operation under distorted grid voltage states should be accomplished. In order to attain minimal switching loss performance and sinusoidal grid current in a three-phase PWM rectifier under both ideal and distorted grid voltage states, a modified MPVFPDC with switching state predetermination approach is proposed. By exploiting the DPWM concept, the traditional switching state evaluation process is replaced by a switching state predetermination strategy. This strategy performs an online predetermination of four switching states to evaluate in the next sampling instant instead of using all switching states as in conventional MPC approaches. Additionally, the predetermination of switching states achieves low switching loss performance by generating clamping regions corresponding to the leg that transmits the largest absolute current value. In accordance with this, a switching state predetermination block is integrated into the MPVFDPC scheme. Meanwhile, to preserve sinusoidal grid current waveforms under distorted grid voltage states, virtual flux control is used in the MPVFDPC strategy. The proposed approach will be conducted under various conditions, including both ideal and distorted grid voltage states, in simulation and experiment to verify its accuracy and effectiveness. Additionally, a quantitative comparison between the proposed approach and Conv. MPDPC and Conv. MPVFDPC are presented to further validate the advantages of the proposed method.
2. Converter Modeling
Figure 1 illustrates the PWM rectifier, where the rectifier, comprised of six power switching devices, is connected to the grid via the line inductance
and resistance
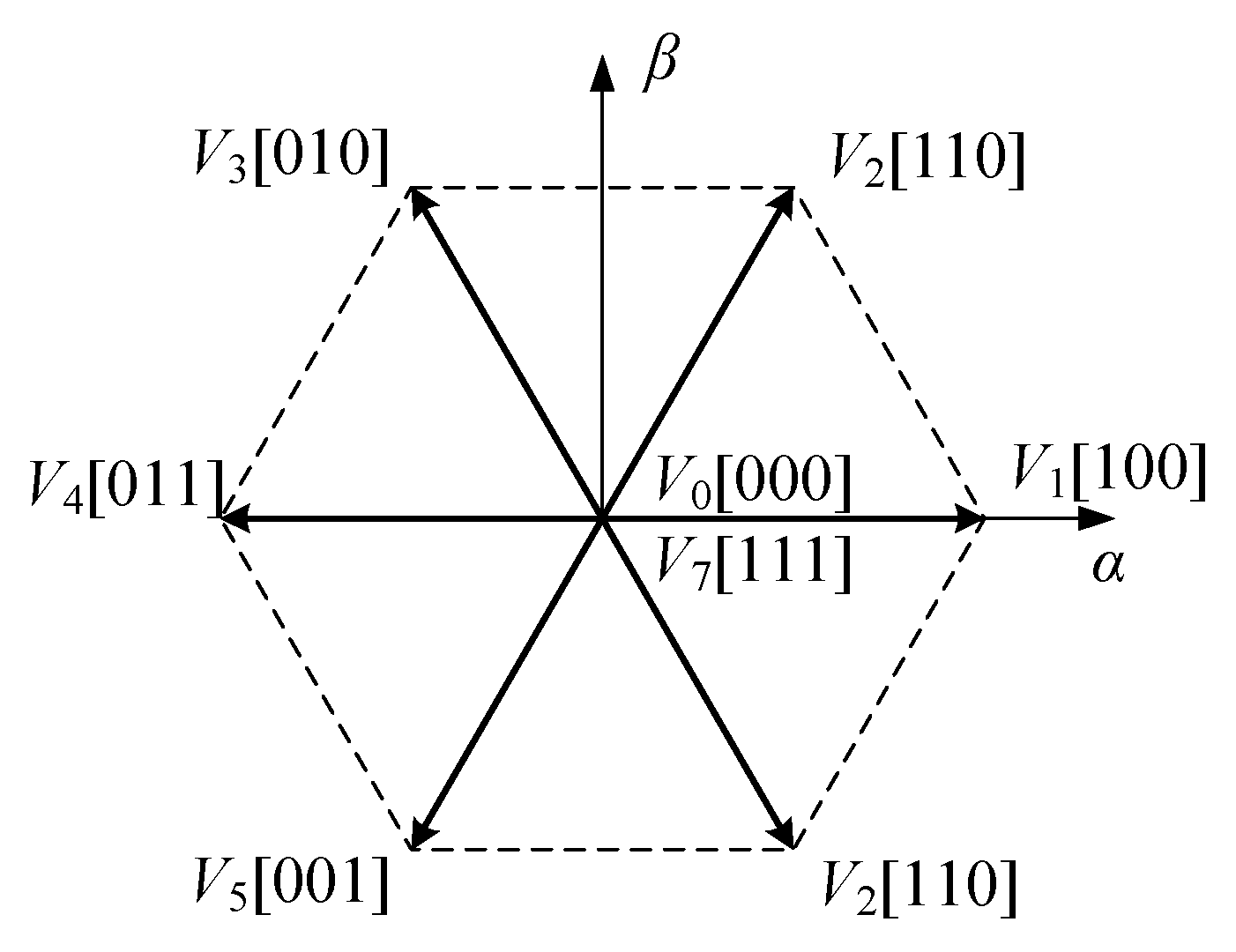
. To prevent short-circuit faults, each phase bridge is configured with two distinct switching states: either the upper bridge turns on while the lower bridge turns off, or vice versa. In general, the grid structure is considered comparable to the ac motor structure because the two systems have similar equivalent configurations with the series resistor, the series inductor, and the ac sinusoidal source. Thus, the grid with the input resistance and inductance is generally termed a virtual ac motor. To introduce ac motor techniques to ac grid systems with the ac-dc converters. Consequently, there are a total of
switching states corresponding to seven rectifier voltage vectors, as depicted in
Figure 2. The switching functions
represent the switching states of each bridge arm as follows:
The mathematical equation of the converter in
frame is
where
is the source voltage vector,
is the current vector, and
is the rectifier voltage vector.
After discretizing, Equation (2) can be
Simplify (3), the predicted grid current at
th instant is expressed as follows:
For the concept of virtual flux, the grid is considered as a fictitious AC motor, where the input
and
is the stator leakage inductance and resistance. Here, the virtual flux vector
can be computed as the integral of the grid voltage
as
According to (2) and (5), the virtual flux vector is expressed by
In the
stationary frame, as the grid voltage and current vectors are employed to represent the complex power, the active and reactive power can be calculated by employing the virtual flux and grid current. Given a balanced three-phase power supply and a constant amplitude of the virtual flux vector of grid voltage,
and
can be expressed as
where
is the grid angular frequency.
4. Results and Discussion
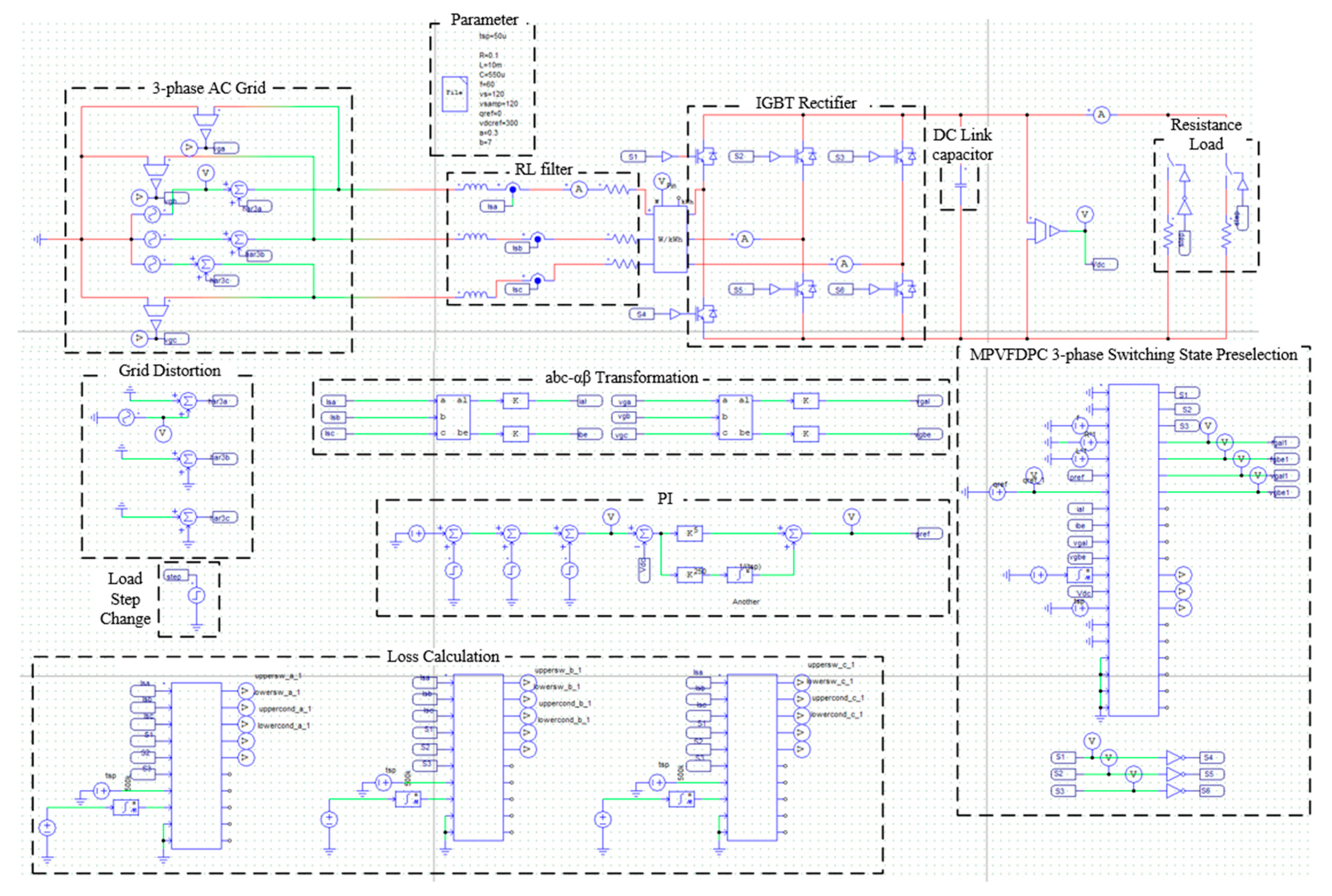
Simulation and experimentation are achieved to verify the developed scheme’s dynamic as well as steady-state performance. The distorted grid voltage state is generated by injecting seventh-order harmonic components into one phase of the grid voltage, and then the operation of the PWM rectifier is investigated as well. Additionally, the developed MPVFDPC is compared to Conv. MPDPC [
9] and Conv. MPVFDPC, which is employed by applying the same virtual flux estimation as in the proposed approach. In the simulation, the circuit simulator, PSIM, was used. The schematic of the PWM rectifier model and the function of each block are specified in
Figure 5. The main parameters for the simulation and experiment are illustrated in
Table 2.
The steady-state results of Conv. MPDPC, Conv. MPVFDPC, and proposed MPVFDPC under an ideal grid voltage state are depicted in
Figure 6a, 6b, and 6c, respectively. Here, the reference DC bus voltage
is set, leading to the resulting reference active power
, whereas the reference reactive power
is zero to obtain unity power factor. In channel (i) of
Figure 6, the grid currents obtained by three approaches are sinusoidal and balanced. It is shown that the
a-phase source voltage and current are in phase and possess the unity power factor characteristics as expected. In terms of switching patterns, the switching patterns derived by the proposed MPVFDPC approach comprise clamping regions corresponding to one-third of the fundamental period. The non-switching regions are placed correctly in the vicinity of the maximum grid currents, as expected. In channel (ii) of
Figure 6, the DC bus voltage, active power, and reactive power follow the corresponding references accurately in both three control schemes with negligible ripples.
Figure 7 shows the steady-state simulation waveforms of the PWM rectifier under the distorted grid voltage state obtained by three control schemes. The 10% seventh-order harmonic component is imposed on the
a-phase grid voltage. Then, as depicted in
Figure 7a, the grid currents produced by the Conv. MPDPC are distorted. Meanwhile, the grid currents acquired by Conv. MPVFDPC and proposed MPVFDPC are kept in sinusoidal form due to the implementation of virtual flux control. As observed in the presence of distorted grid voltage, the unity power factor operation is sustained. Furthermore, the patterns of the switch operation derived by the developed MPVFDPC approach comprise non-switching regions corresponding to one-third of the fundamental period, as shown in
Figure 7c. These non-switching periods occur in the vicinity of the maximum of grid currents, even with grid voltage distortion. In channel (ii) of
Figure 7, the DC bus voltage, active power, and reactive power follow accurately the corresponding references, but the DC bus voltage produced by the Conv. MPDPC has a slightly higher ripple than the two remaining approaches.
The dynamic performance validation is carried out by periodically altering the reference value of the DC bus voltage between 250 V and 300 V.
Figure 8 indicates that the grid currents, DC bus voltage, and active power can promptly follow the command without experiencing overshooting. Moreover, the unity power factor is consistently sustained throughout the dynamic response. The dynamics of the developed MPVFDPC method are similar to those of the two conventional approaches. Additionally, the proposed approach properly creates clamping regions under the alteration in the reference DC bus voltage.
In order to further prove the proposed scheme, the PWM rectifier experiment setup is depicted in
Figure 9. The testing devices and experiment parameters are listed in
Table 3.
The sampling frequency of the proposed model predictive control algorithm for the ac-dc converter was 20 kHz. The actual switching frequency was about 8 kHz, which varies because the model predictive control platform leads to varying switching frequency operations. In addition, the voltage and current sensors used in this experiment were LV25-P and LA55-P, respectively, as shown in
Table 3. The experimental waveforms of the PWM rectifier in steady-state operation with different approaches are presented in
Figure 10. Similar to the simulation, the reference DC bus voltage
results in
and
is zero for the unity power factor. As can be seen in channel (i) of
Figure 10, the grid currents synthesized from three approaches are sinusoidal and balanced. It is observed that the
a-phase grid voltage and current are in phase and operate with the unity power factor as expected. In terms of switching patterns, the switching patterns derived by the proposed MPVFDPC approach comprise clamping regions corresponding to one-third of the
Figure 7c period. These clamping regions are placed correctly in the vicinity of the maximum grid currents, as in the simulation. Additionally, the DC bus voltage, active power, and reactive power correctly reach the reference value with negligible ripple.
Under the distorted grid voltage state, the 10% seventh-order harmonic component is imposed on the
a-phase grid voltage, as depicted in
Figure 11. The grid current acquired by the Conv. MPDPC is highly distorted. In contrast, the grid currents with Conv. MPVFDPC and proposed MPVFDPC are better, where the sinusoidal form is maintained due to the implementation of virtual flux control. As observed in the presence of distorted grid voltage, the unity power factor operation is sustained. Furthermore, in
Figure 11c, the switching patterns acquired by the developed MPVFDPC approach comprise non-switching regions equal to one-third of the fundamental period.
In order to verify the dynamic experimental performance of the developed approach, the active power reference is increased from 600 W to 900 W in
Figure 12. It is evident that the waveform of
a-phase grid current acquired by three control schemes can quickly track the change in reference active power without overshooting. In channel (ii) of
Figure 12, it shows that active and reactive powers respond fast to the change of reference. The dynamics of the developed MPVFDPC method are comparable to conventional approaches. Furthermore, the developed MPVFDPC approach correctly generates clamping regions even during dynamic performance, as can be seen from the
a-phase switching pattern.
From the steady-state and dynamic performance results in both simulation and experiment, the accurate operation of the proposed MPVFDPC with switching state predetermination approach is demonstrated. The grid current is guaranteed under distorted as well as ideal grid conditions, whereas the same dynamic performance is achieved. A quantitative comparison of the average THD of grid currents, total switching loss, error between actual and reference active power, and error between actual and reference reactive power for three control schemes is illustrated in
Figure 13 and
Figure 14. Regarding the switches’ losses in the PWM converter, the switching and conduction losses are estimated in accordance with the application note in [
21] using the datasheet parameters of IGBT module SKM50GB123D [
22]. Although this paper targets the same power circuit and the same purpose for high efficiency as well as immunity from grid voltage distortion, same as the previous paper [
19], the main difference of the two papers is the control objective and the corresponding controller design methodology. The control target of this paper is to directly control the real and reactive power components by reducing switching losses. As a result, this paper aims to operate the three-phase ac-dc rectifier by directly calculating the future power elements. In addition, the controller in this paper was designed to make the actual power components directly follow their references, minimizing future power control costs. On the other hand, the paper [
19] is based on a controller design with a converter virtual flux as a control objective. Thus, the previous paper was developed in such a way to obtain an optimal converter flux in the future to achieve the desired dc output voltage and sinusoidal input current with a unity power factor.
In
Figure 13, the quantitative performance of Conv. MPDPC, Conv. MPVFDPC, and proposed MPVFDPC are presented under variation of sampling period. The selection of the sampling period is important for the converter operation and switching frequency in the MPC technique. Opting for a smaller sampling period enhances system performance, albeit at the cost of higher switching frequencies in power switches. Conversely, a longer sampling period diminishes the system’s performance. It can be clearly shown that the average THD of grid current from the three control schemes is similar. Meanwhile, the total switching loss of the PWM rectifier reduces with the increased sampling period. In
Figure 13b, at a low sampling period, the total switching loss acquired by the developed MPVFDPC is reduced compared with two previous schemes by approximately 18%. This difference is lowered when the sampling period increases. Regarding the error between active power (reactive power) and the corresponding reference, the Conv. MPDPC has a slightly higher error than that of the Conv. MPVFDPC and the proposed MPVFDPC.
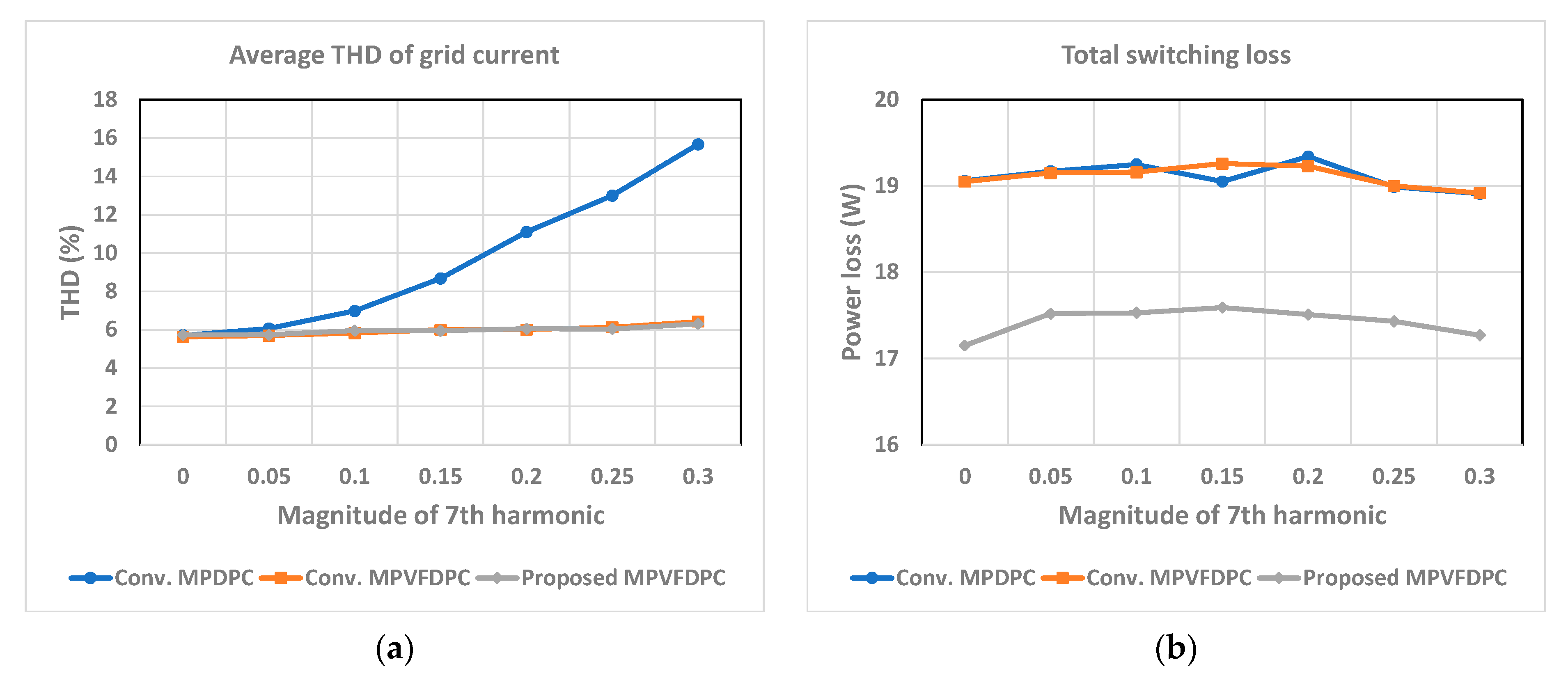
Figure 14a–d show a quantitative comparison between three control schemes following the rise of the added seventh-order harmonics. In
Figure 14a, the average THD obtained by Conv. MPDPC significantly increases following the rise of the magnitude of the seventh-order harmonic component. At 30% injection of the seventh-order harmonic component, the average THD increases by about 2.8 times compared to the ideal state. Meanwhile, because of the implementation of virtual flux control, the average THD obtained by Conv. MPVFDPC and proposed MPVFDPC approaches slightly increase when the magnitude of the seventh-order harmonic component rises. Regarding total switching loss, it is clearly observed in
Figure 14b that the total switching loss from the developed MPVFDPC is decreased in comparison with the two remaining approaches under different magnitudes of the injected seventh-order harmonic component. This difference is about 10%. Meanwhile, both the error between active power and reference active power and the error between reactive power and reference reactive power obtained by Conv. MPDPC are higher than those of the proposed MPVFDPC approach.
The part focusing on quantitative performance comparison substantiates the effectiveness of the MPVFDPC approach with the switching state predetermination approach under varied conditions. The proposed MPVFDPC method substantially reduces switching losses, enhances the efficiency of the PWM rectifier, and simultaneously upholds the THD performance of grid currents. Moreover, the reduction in switching losses is consistently maintained even as the harmonic component increases, which confirms the robust performance of the proposed MPVFDPC technique. Actual grids often have distorted voltage waveforms in the shape of sinuses with slightly cut-off peaks. Those distorted grid voltage waveforms in the time-domain lead to increased unwanted high-frequency components contained in the frequency components of the grid voltage in the frequency domain. The increased high-frequency elements in the grid voltage can lead to distorted input current waveforms and reduced power controllability. However, the developed method in this paper directly controls real and reactive power components using the virtual flux, which is an integrator of the grid voltage. Integrating the grid voltage in the time domain can function as low-pass filtering of the voltage in the frequency domain, and correspondingly, the adverse effects of distorted grid voltage waveforms with a sinus shape with slightly cut-off peaks on the converter controller can be reduced.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}