
Analysis of Scraper Conveyor Chain Dynamics under Falling Coal Impact Conditions

Abstract
1. Introduction
2. Methodology
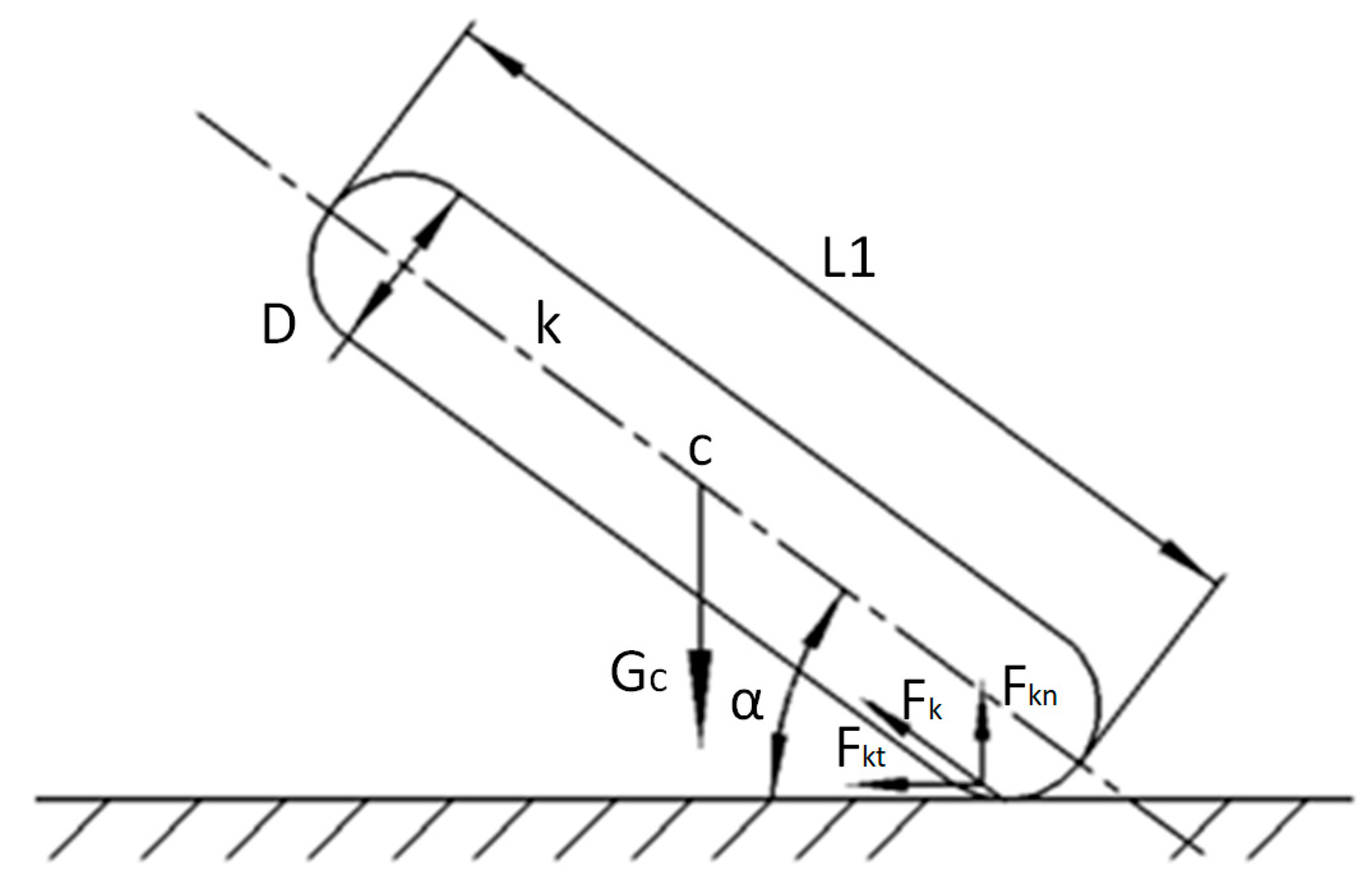
2.1. Coal Impact Theory
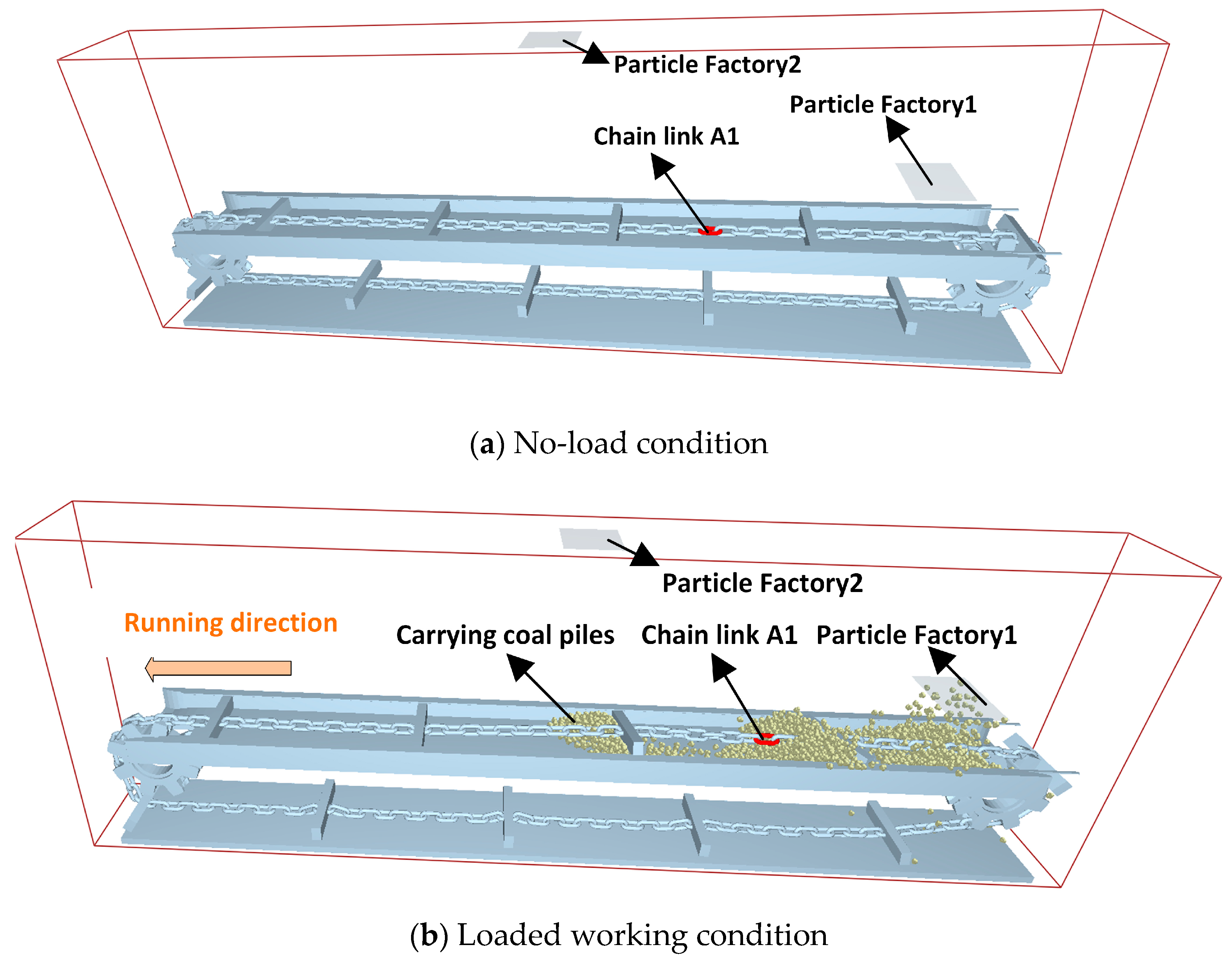
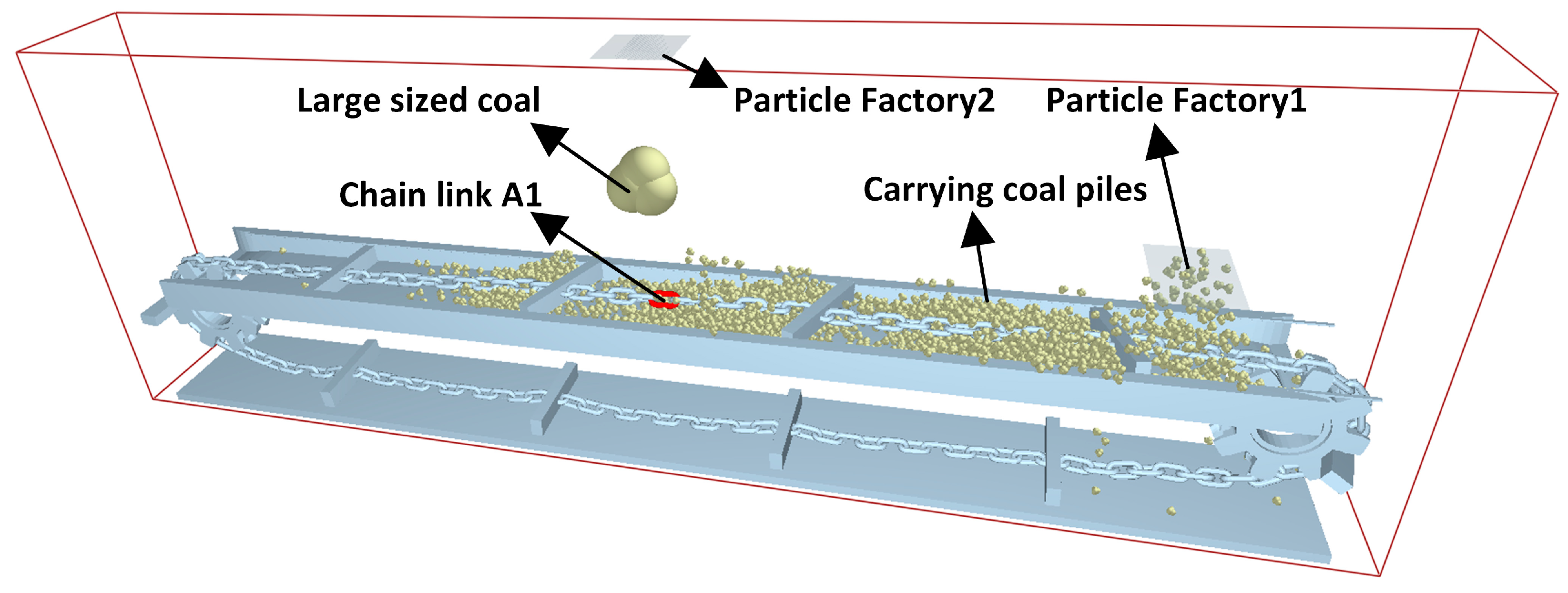
2.2. Adams-EDEM Coupling Model Creation
3. Results and Discussion
3.1. Simulation Programming
3.2. Simulation and Analysis of Chain Drive System under Stable Operating Conditions
3.2.1. Chain Ring Contact Force Analysis
3.2.2. Scraper Vibration Acceleration Analysis
3.3. Simulation and Analysis of Shock in Chain Drive System under No-Load Condition
3.3.1. Chain Ring Impact Analysis
3.3.2. Chain Ring Contact Force Analysis
3.3.3. Scraper Vibration Acceleration Analysis
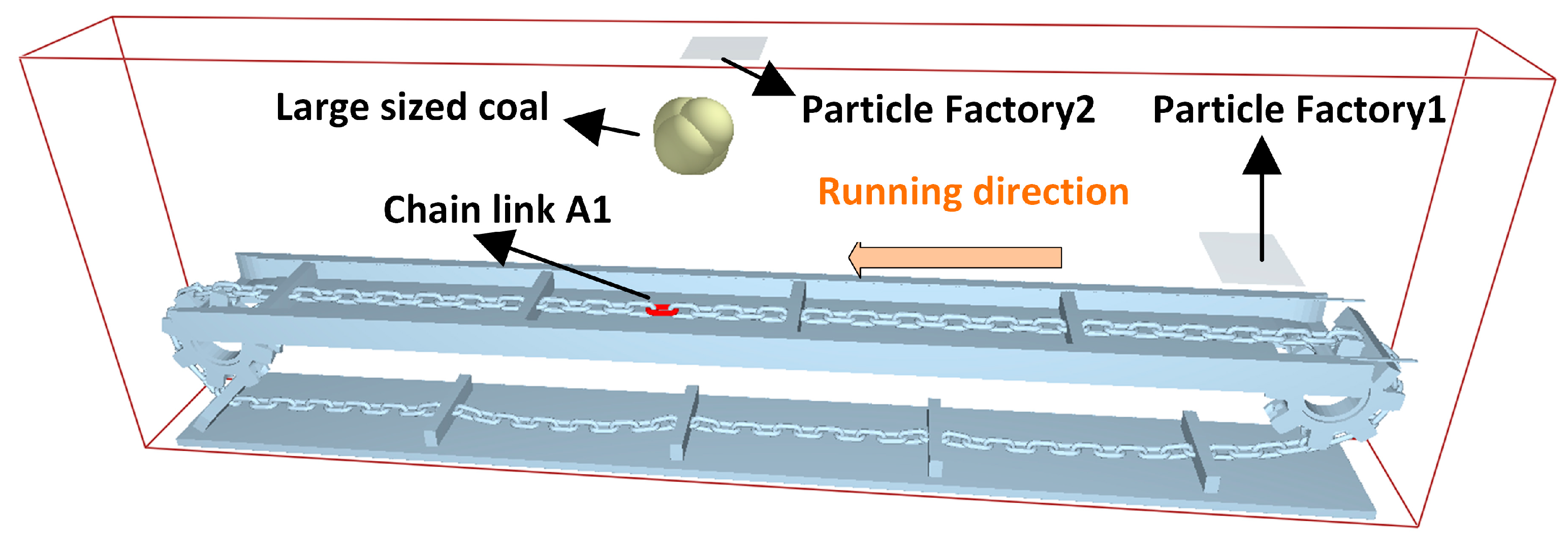
3.4. Simulation and Analysis of the Impact of Chain Drive System under Loaded Condition
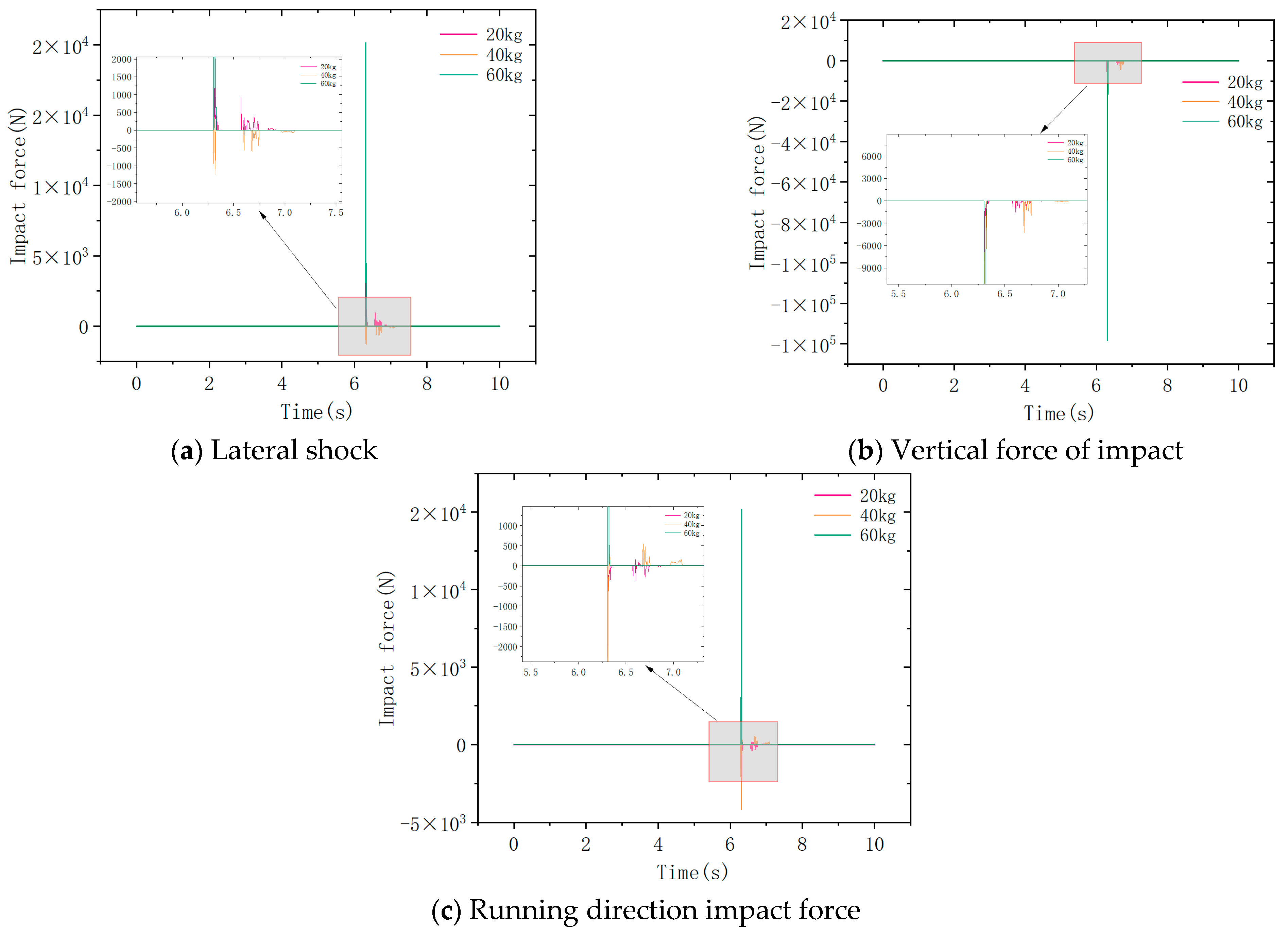
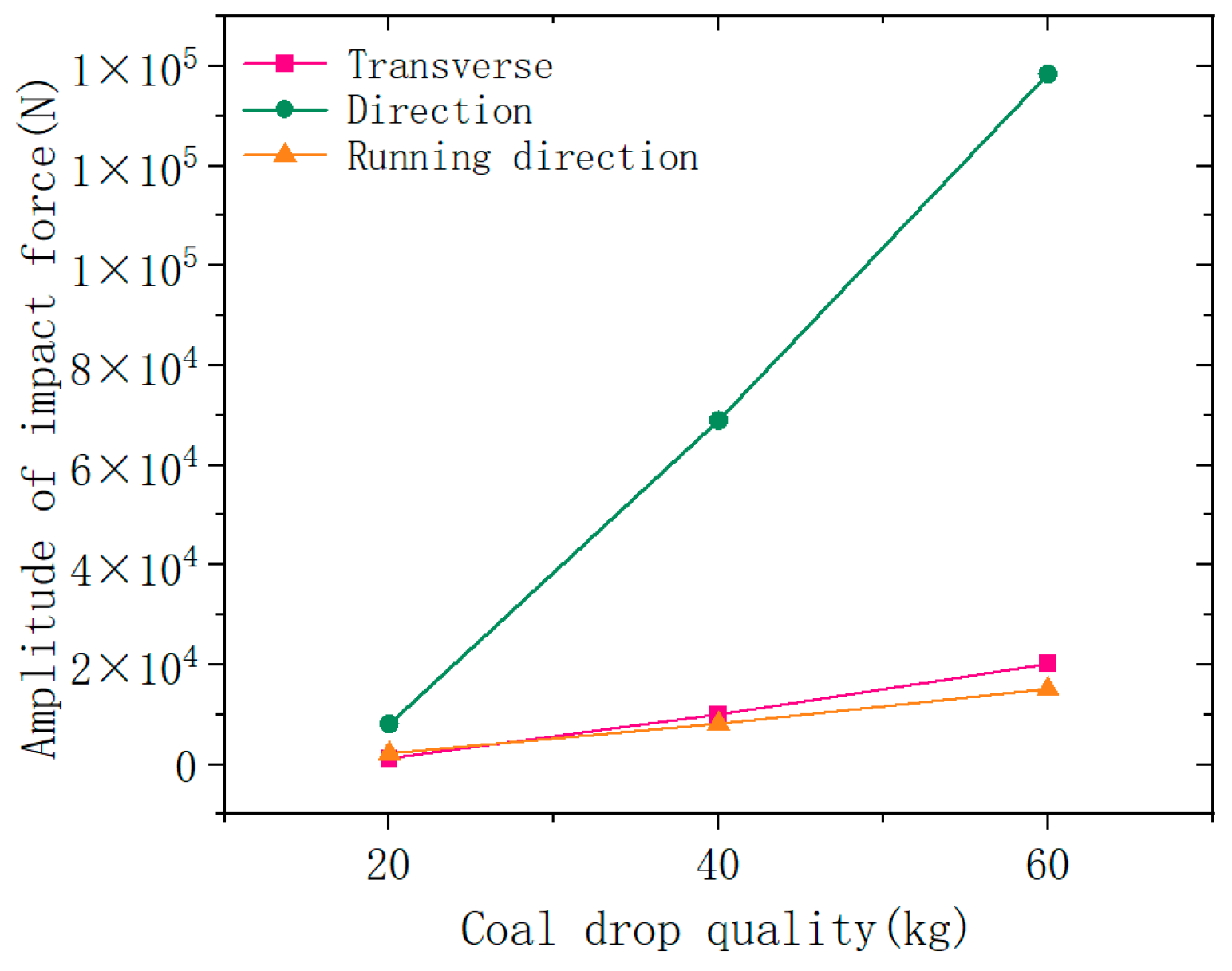
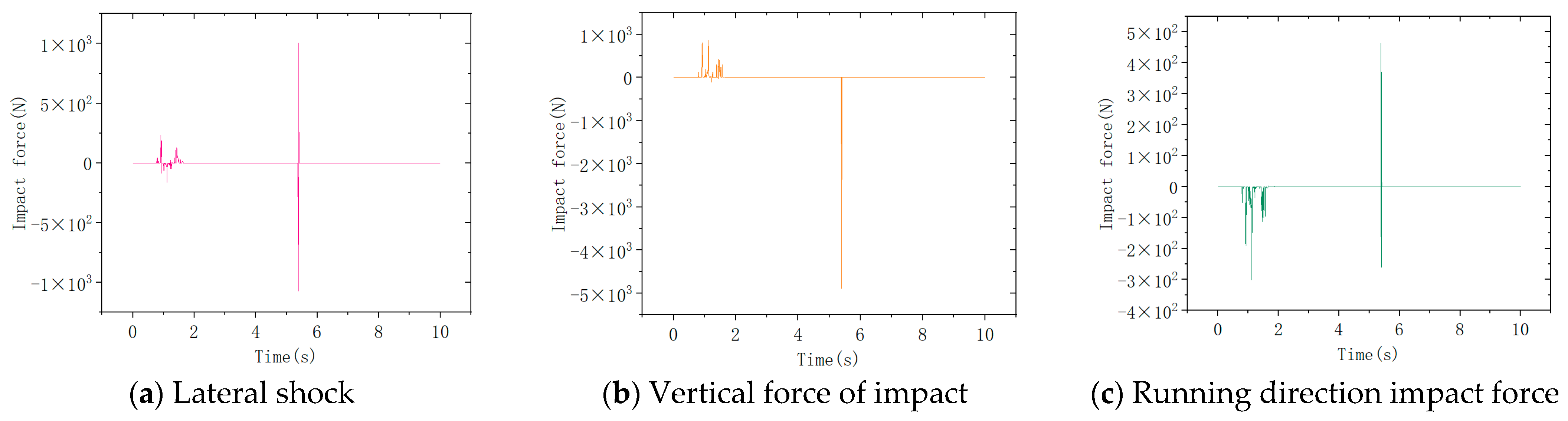
3.4.1. Chain Ring Impact Analysis
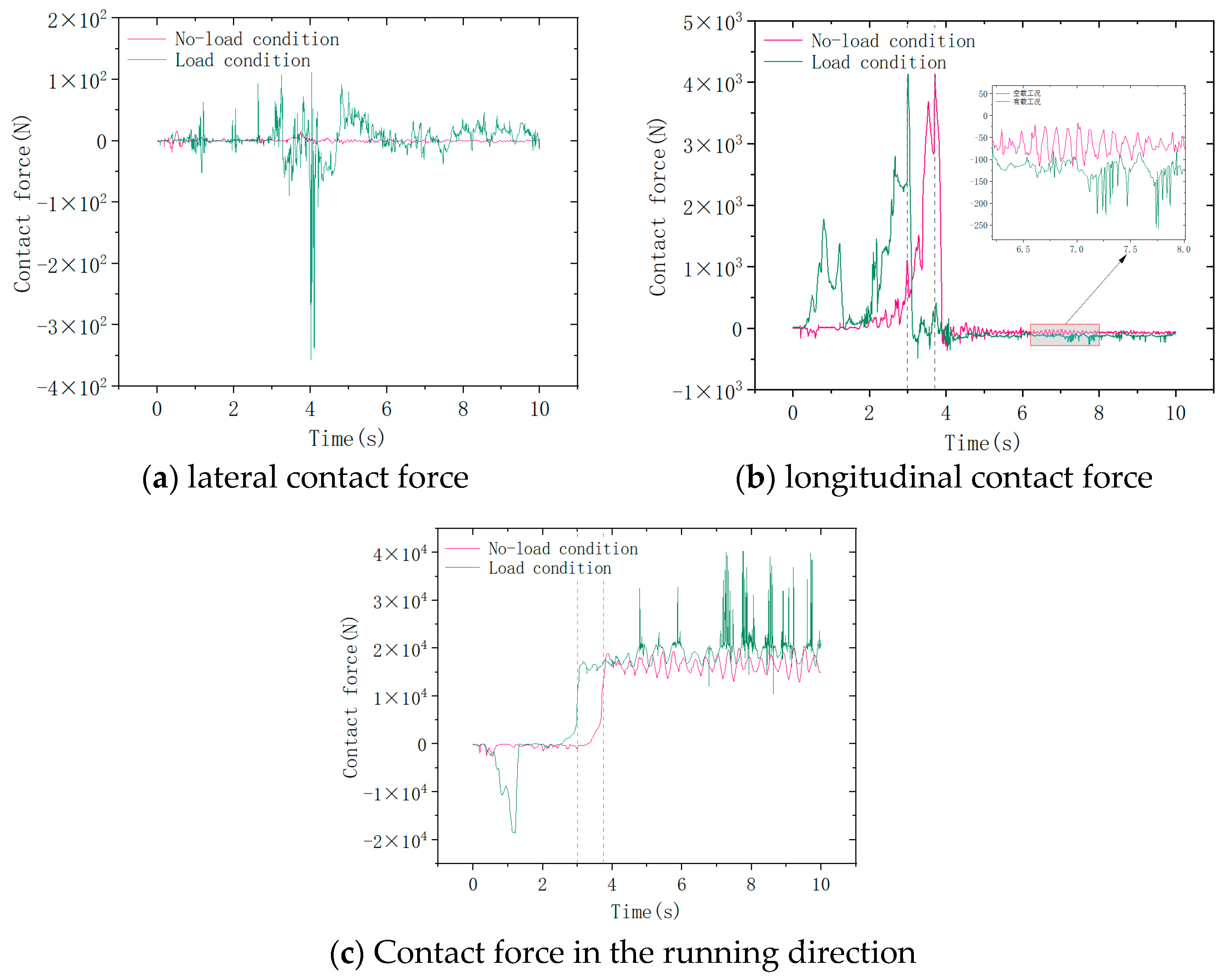
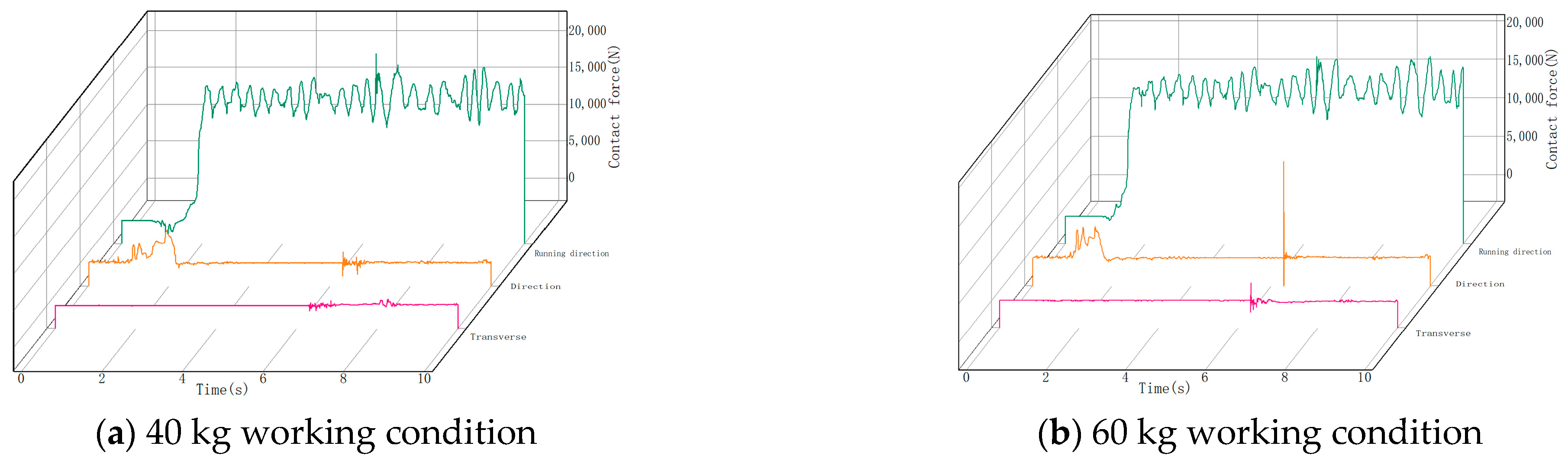
3.4.2. Analysis of Contact Force in Chain Links
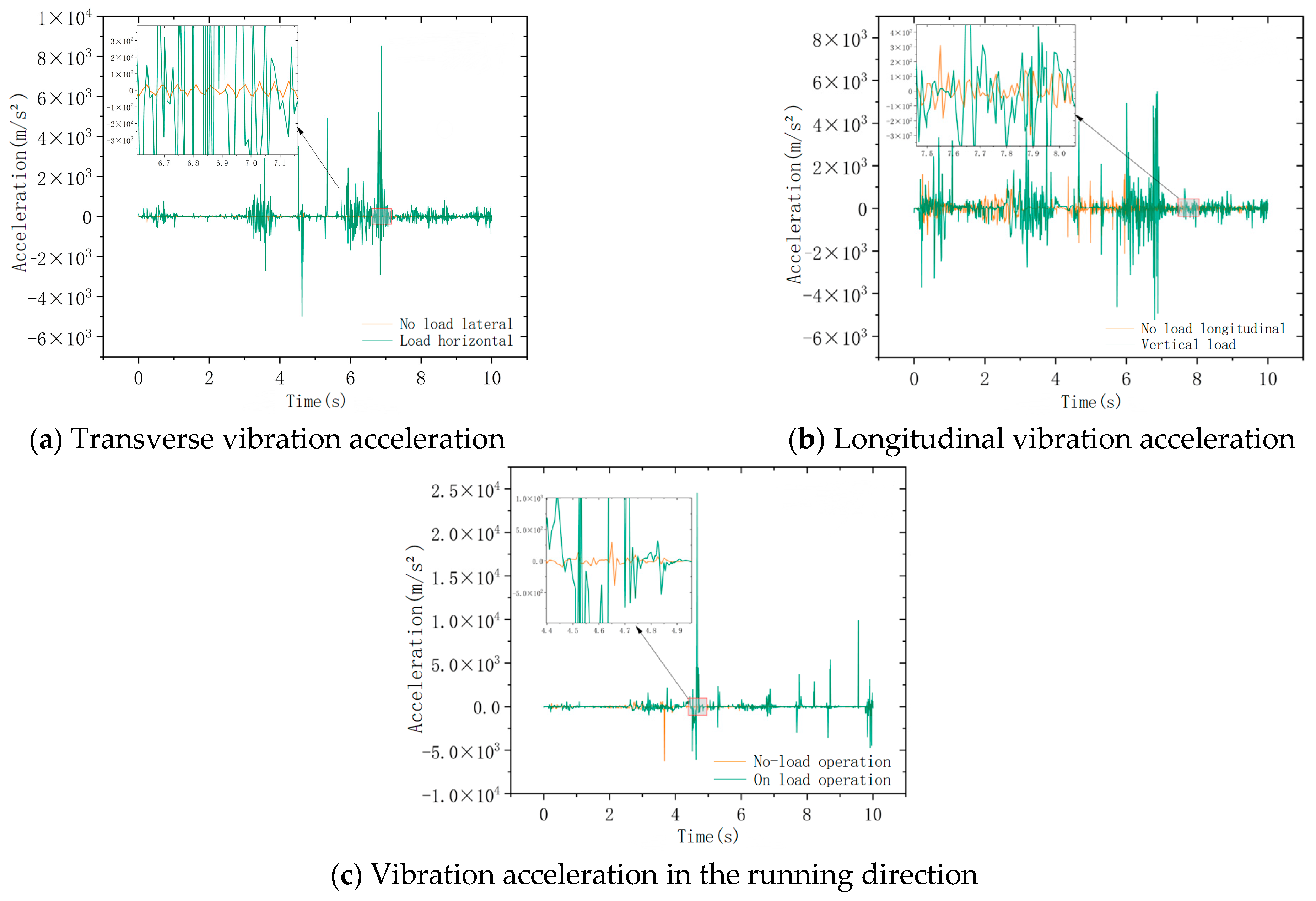
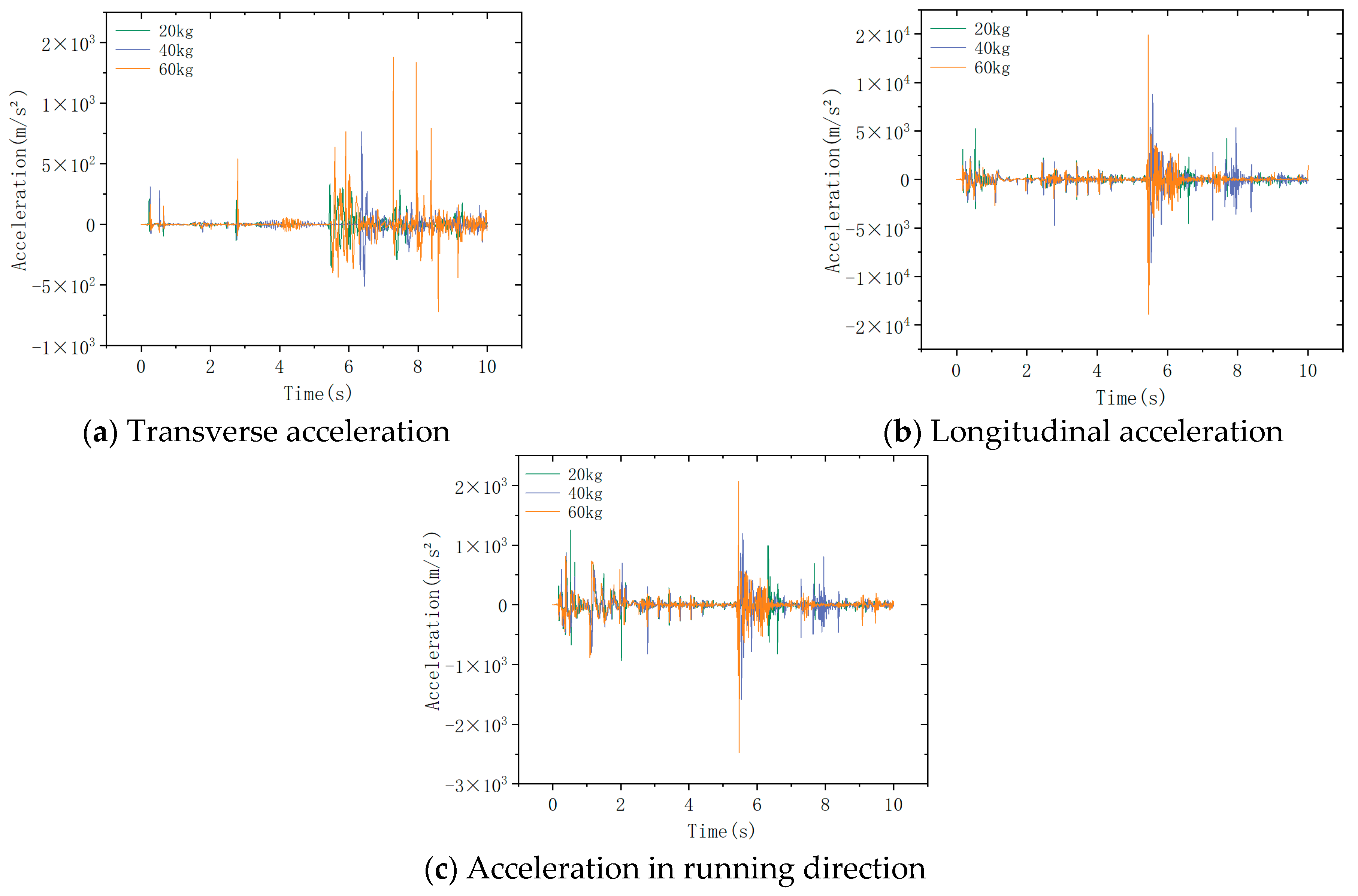
3.4.3. Scraper Vibration Acceleration Analysis
4. Conclusions
- (1)
- The acceleration of the scraper in all three directions under loaded conditions is greater than under unloaded conditions, with the highest acceleration occurring in the running direction. The loaded coal pile increases the speed of the driven sprocket.
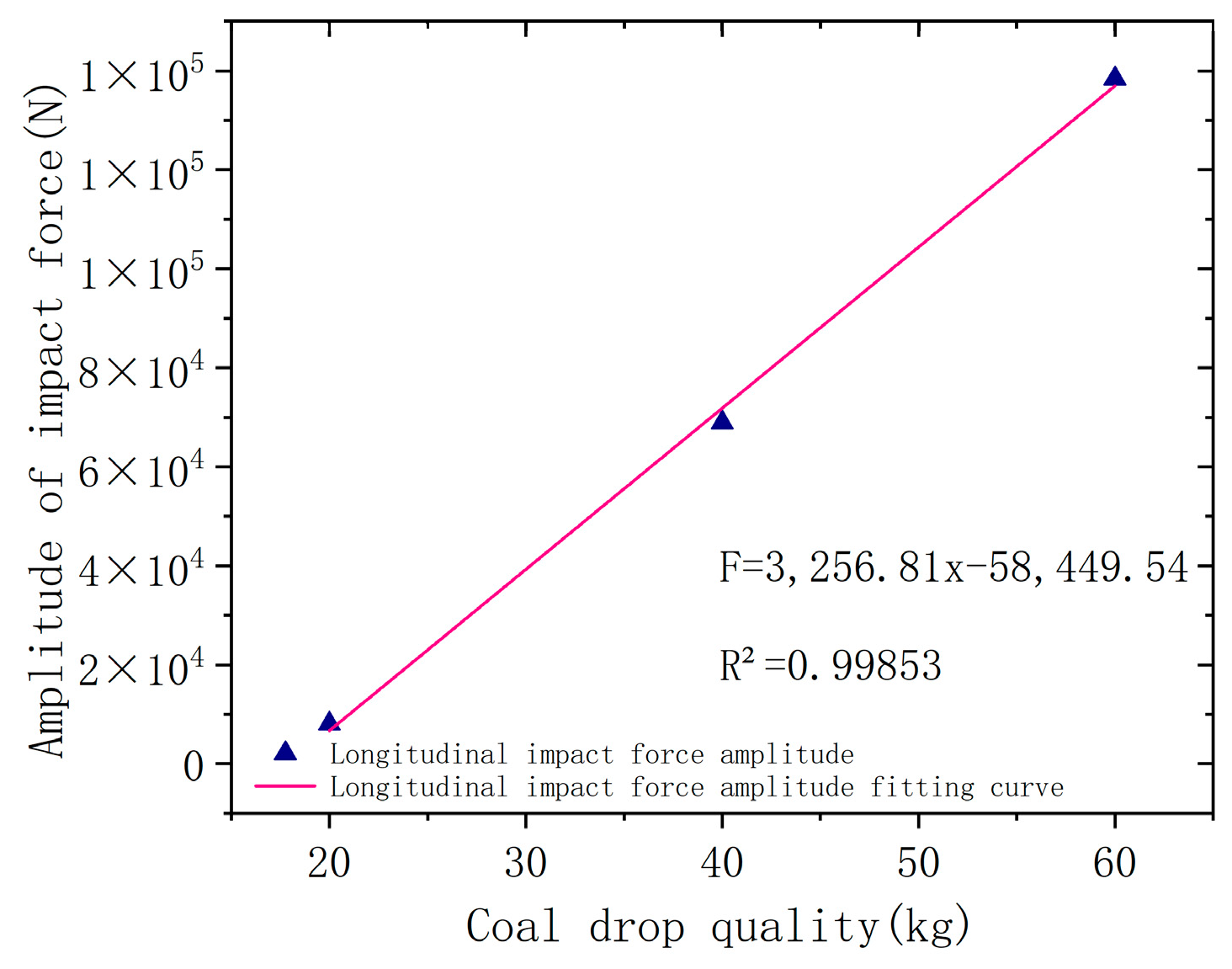
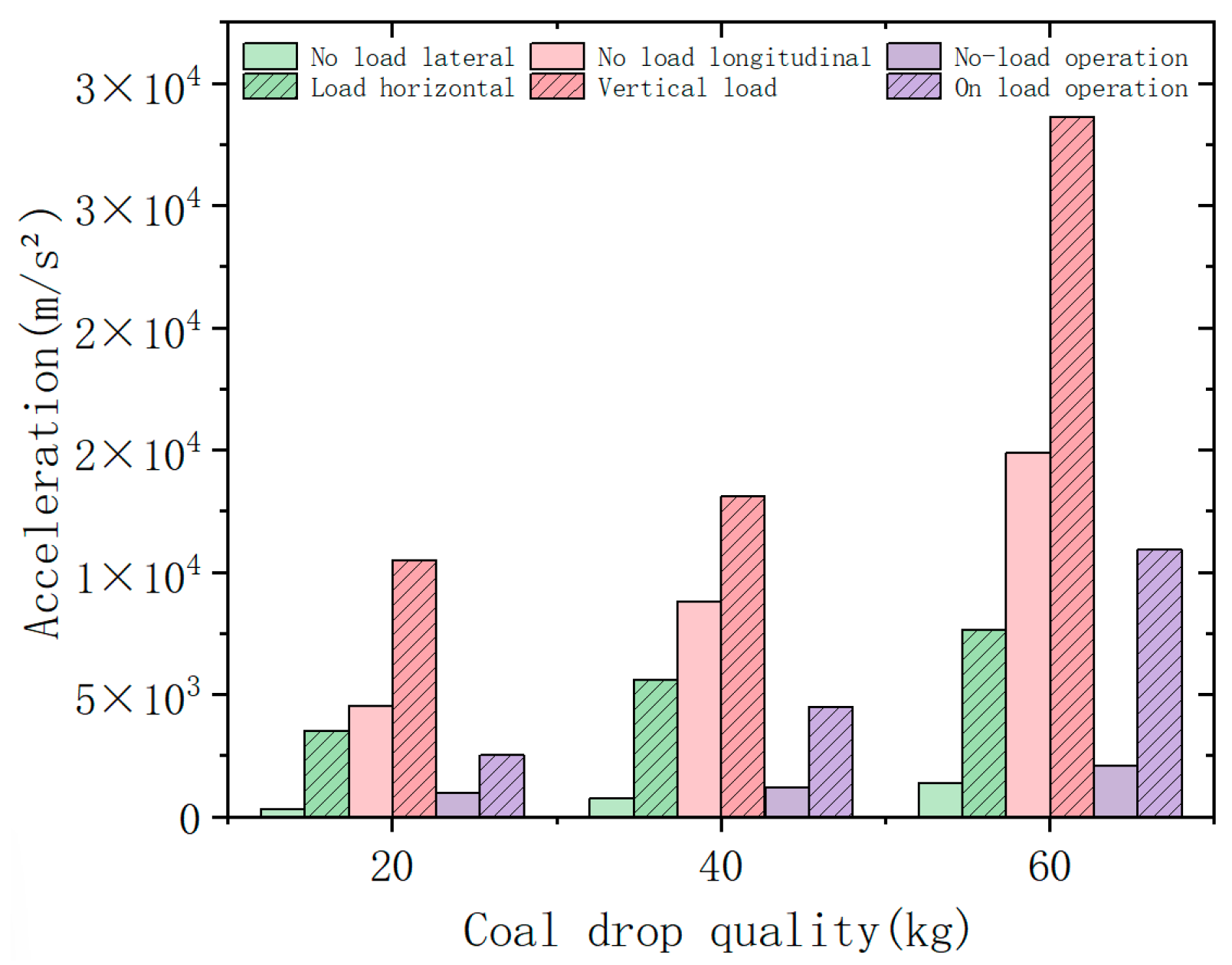
- (2)
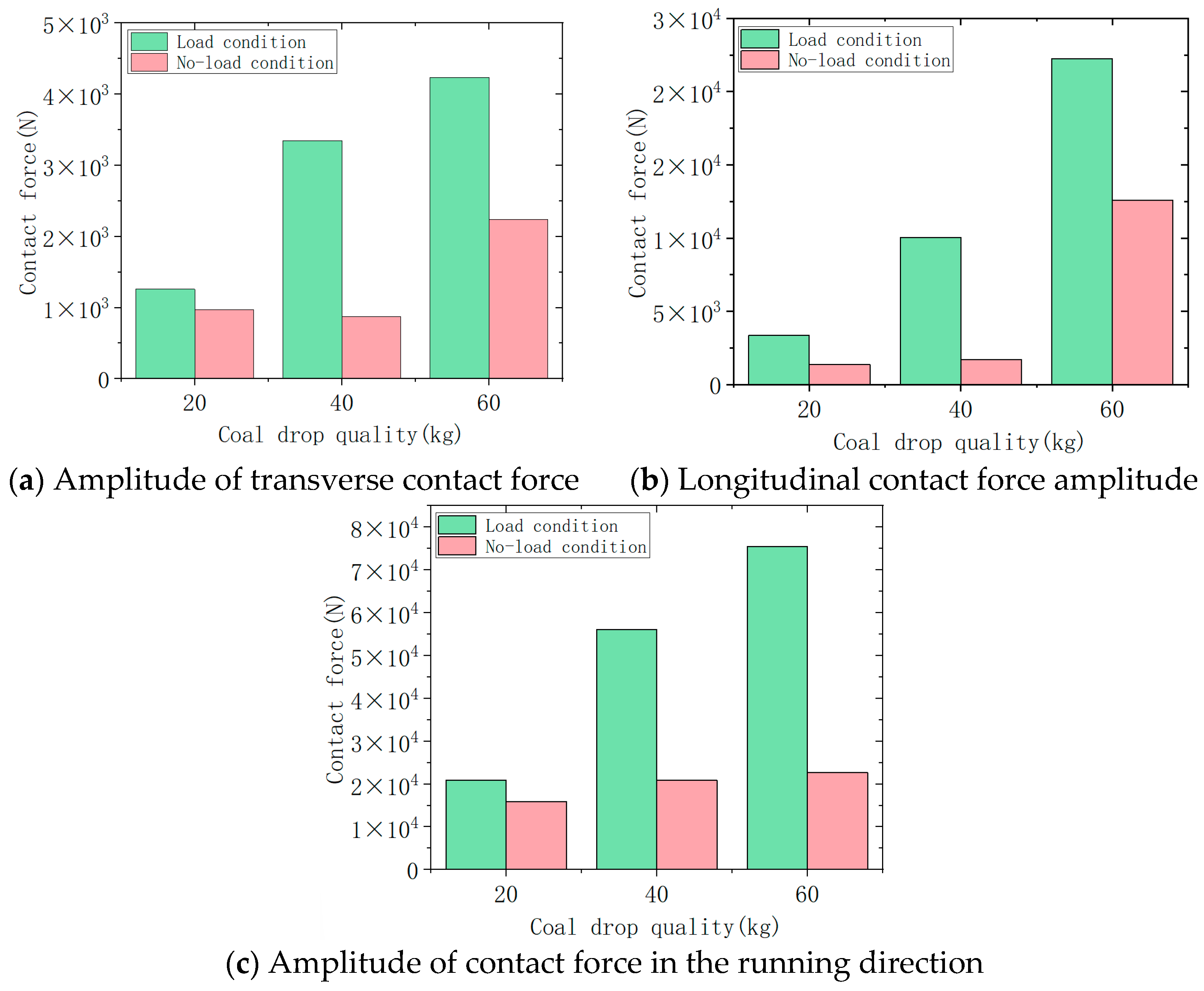
- As the mass of falling coal increases, the longitudinal impact force on the chain ring exhibits a clear linear relationship: . The maximum acceleration fluctuation of the scraper occurs in the longitudinal direction, while the transverse acceleration fluctuation lasts the longest.
- (3)
- Compared to the unloaded condition, the loaded coal pile in the loaded condition reduces the three-way impact force and three-way acceleration fluctuations experienced by the chain ring due to its cushioning and stabilizing effects. However, the three-way contact force between the chain rings is greater than in the unloaded condition. Thus, under the impact of falling coal, the loaded coal pile has a damping effect on the vibration of the chain drive system but increases the contact force between the chain rings.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wieczorek, A.N.; Wójcicki, M. Synergism of the Binary Wear Process of Machinery Elements Used for Gaining Energy Raw Materials. Energies 2021, 14, 1981. [Google Scholar] [CrossRef]
- Jiang, S.B.; Huang, S.; Mao, Q.H.; Zeng, Q.L.; Gao, K.D.; Lv, J.W. Dynamic Properties of Chain Drive in a Scraper Conveyor under Various Working Conditions. Machines 2022, 10, 579. [Google Scholar] [CrossRef]
- Grinschgl, M.; Reich, F.M.; Abeltshauser, R.; Eder, M.; Antretter, T. New approach for the simulation of chain drive dynamics with consideration of the elastic environment. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2017, 231, 103–120. [Google Scholar] [CrossRef]
- Zhang, D.S.; Mao, J.; Liu, Z.S. Dynamics simulation and experiment on the starting and braking of scraper conveyor. J. China Coal Soc. 2016, 2, 0356. [Google Scholar] [CrossRef]
- Xie, C.X.; Liu, Z.X.; Mao, J.; Miao, X.M.; Lu, J.N. Analysis of torsional vibration characteristics of scraper conveyor on chain blocked condition. J. China Coal. Soc. 2018, 8, 1722. [Google Scholar] [CrossRef]
- Zhang, P.L.; Li, B.; Wang, X.W.; Liu, C.Y.; Bi, W.J.; Ma, H.Z. The Loading Characteristics of Bulk Coal in the Middle Trough and Its Influence on Rigid Body Parts. Stroj. Vestn. J. Mech. E 2020, 66, 114–126. [Google Scholar] [CrossRef]
- Jiang, S.B.; Lv, R.B.; Wan, L.R.; Mao, Q.H.; Zeng, Q.L.; Gao, K.D.; Yang, Y. Dynamic Characteristics of the Chain Drive System of Scraper Conveyor Based on the Speed Difference. IEEE Access 2020, 8, 168650–168658. [Google Scholar] [CrossRef]
- Wang, D.G.; Zhang, J.; Zhu, Z.C.; Gang, S.; Xiang, L. Crack initiation characteristics of ring chain of heavy-duty scraper conveyor under time-varying loads. Adv. Mech. Eng. 2019, 11, 1687814019880366. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, R.X.; Tian, Y. Scraper Conveyor Structure Improvement and Performance Comparative Analysis. Strength Mater. 2020, 52, 683–690. [Google Scholar] [CrossRef]
- Cundall, P.A. A computer model for simulating progressive, large-scale movement in blocky rock system. In Proceedings of the International Symposium on Rock Mechanics, Nancy, France, 4–6 October 1971; pp. 129–136. [Google Scholar]
- Yuan, P.F.; He, B.Y.; Zhang, L.H. Planar dynamic modelling of round link chain drives considering the irregular polygonal action and guide rail. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2021, 235, 338–352. [Google Scholar] [CrossRef]
- Dai, K.Y.; Zhu, Z.C.; Shen, G.; Li, X.; Tang, Y.; Wang, W. Modeling and Adaptive Tension Control of Chain Transmission System with Variable Stiffness and Random Load. IEEE T Ind. Electron. 2022, 69, 8335–8345. [Google Scholar] [CrossRef]
- Jonczy, I.; Wieczorek, A.N.; Podwórny, J.; Gerle, A.; Staszuk, M.; Szweblik, J. Characteristics of hard coal and its mixtures with water subjected to friction. Gospod. Surowcami Min. 2020, 36, 185–201. [Google Scholar] [CrossRef]
- Fedorko, G.; Nečas, J.; Zegzulka, J.; Gelnar, D.; Molnár, V.; Tomašková, M. Measurement of amount for steel abrasive material transported by special scraper conveyor. Appl. Sci. 2021, 11, 1852. [Google Scholar] [CrossRef]
- Dzidek, B.M.; Adams, M.J.; Andrews, J.W.; Zhang, Z.B.; Johnson, S.A. Contact mechanics of the human finger pad under compressive loads. J. R. Soc. Interface 2017, 14, 20160935. [Google Scholar] [CrossRef] [PubMed]
- Thornton, C. Coefficient of restitution for collinear collisions of elastic-perfectly plastic spheres. J. Appl. Mech. 1997, 64, 383–386. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Particle Radius (mm) | Particle Density (kg/m3) | Young’s Modulus (Pa) | Shear Modulus (Pa) | Poisson’s Ratio |
|---|---|---|---|---|---|
| numerical value | 38.8 | 7801 | 1011 | 1010 | 0.29 |
| Groups | Operational State | Coal Transportation | Falling Coal Mass (kg) |
|---|---|---|---|
| 1 | Run smoothly | No-load condition | - |
| 2 | Loaded working condition | - | |
| 3 | Impact condition | No-load condition | 20 |
| 4 | 40 | ||
| 5 | 60 | ||
| 6 | Loaded working condition | 20 | |
| 7 | 40 | ||
| 8 | 60 |
| Type of Working Condition | Orthogonal | Vertically | Running Direction |
|---|---|---|---|
| No-load condition | 0.12382 N | 160.01 N | 9876.1 N |
| Loaded condition | 2.5852 N | 137.82 N | 10,829 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, S.; Zhang, Y.; Zeng, Q.; Chen, S.; Qu, W.; Zhang, H. Analysis of Scraper Conveyor Chain Dynamics under Falling Coal Impact Conditions. Machines 2024, 12, 648. https://doi.org/10.3390/machines12090648
Jiang S, Zhang Y, Zeng Q, Chen S, Qu W, Zhang H. Analysis of Scraper Conveyor Chain Dynamics under Falling Coal Impact Conditions. Machines. 2024; 12(9):648. https://doi.org/10.3390/machines12090648
Chicago/Turabian StyleJiang, Shoubo, Yuqi Zhang, Qingliang Zeng, Shaojie Chen, Wei Qu, and Hongwei Zhang. 2024. "Analysis of Scraper Conveyor Chain Dynamics under Falling Coal Impact Conditions" Machines 12, no. 9: 648. https://doi.org/10.3390/machines12090648
APA StyleJiang, S., Zhang, Y., Zeng, Q., Chen, S., Qu, W., & Zhang, H. (2024). Analysis of Scraper Conveyor Chain Dynamics under Falling Coal Impact Conditions. Machines, 12(9), 648. https://doi.org/10.3390/machines12090648