
Compact Linear Flow Phantom Model for Retinal Blood-Flow Evaluation

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
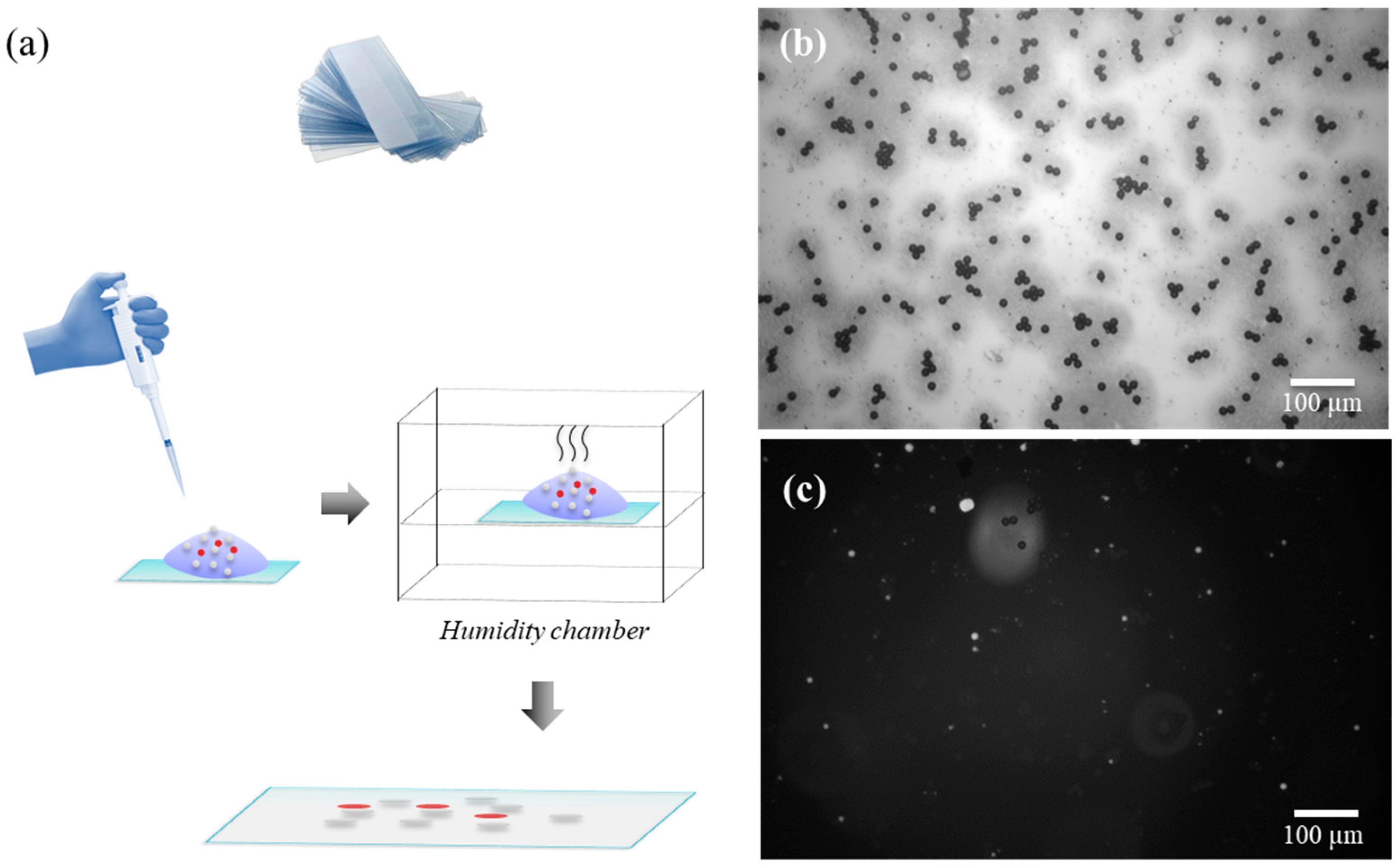
2.1. Phantom Fabrication
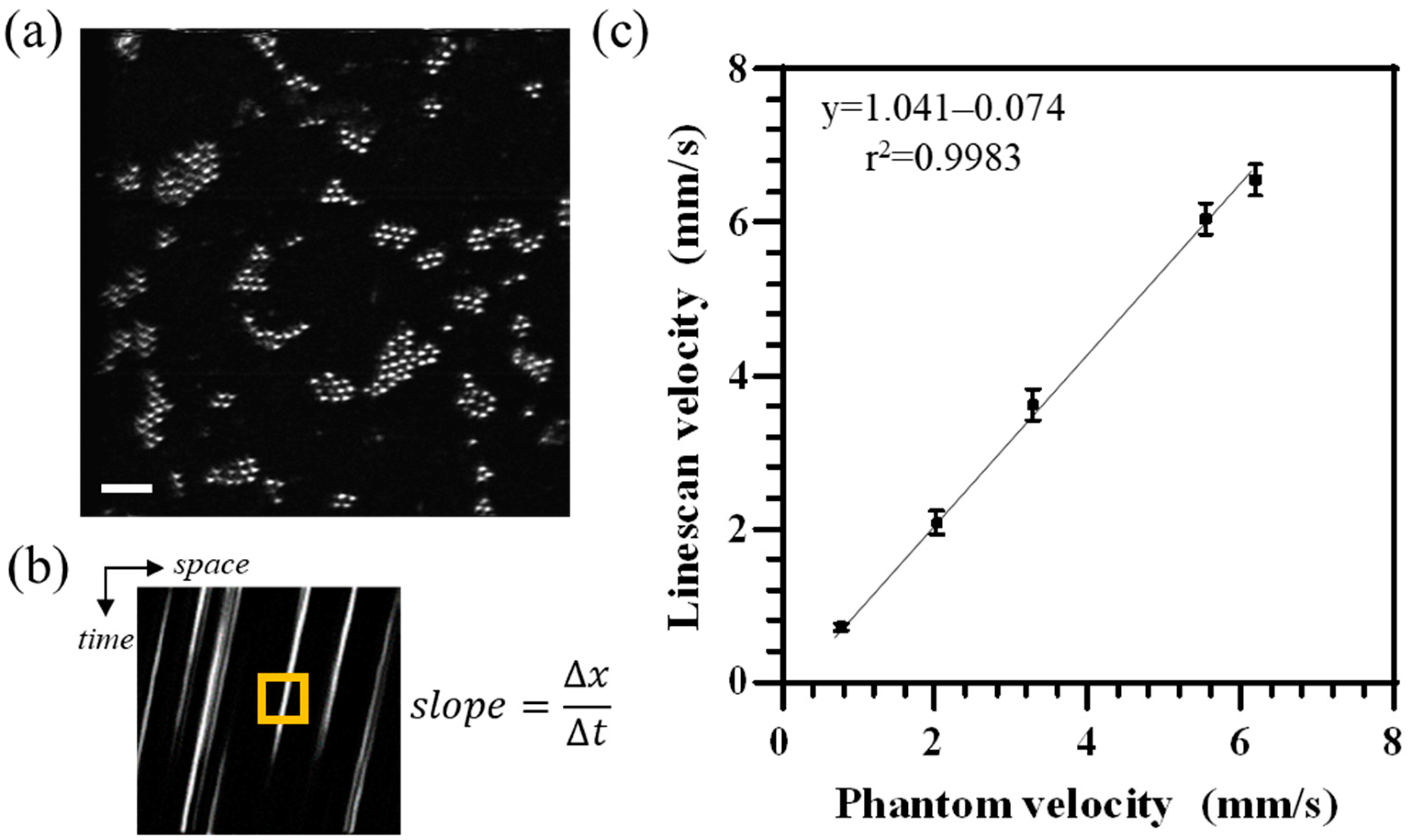
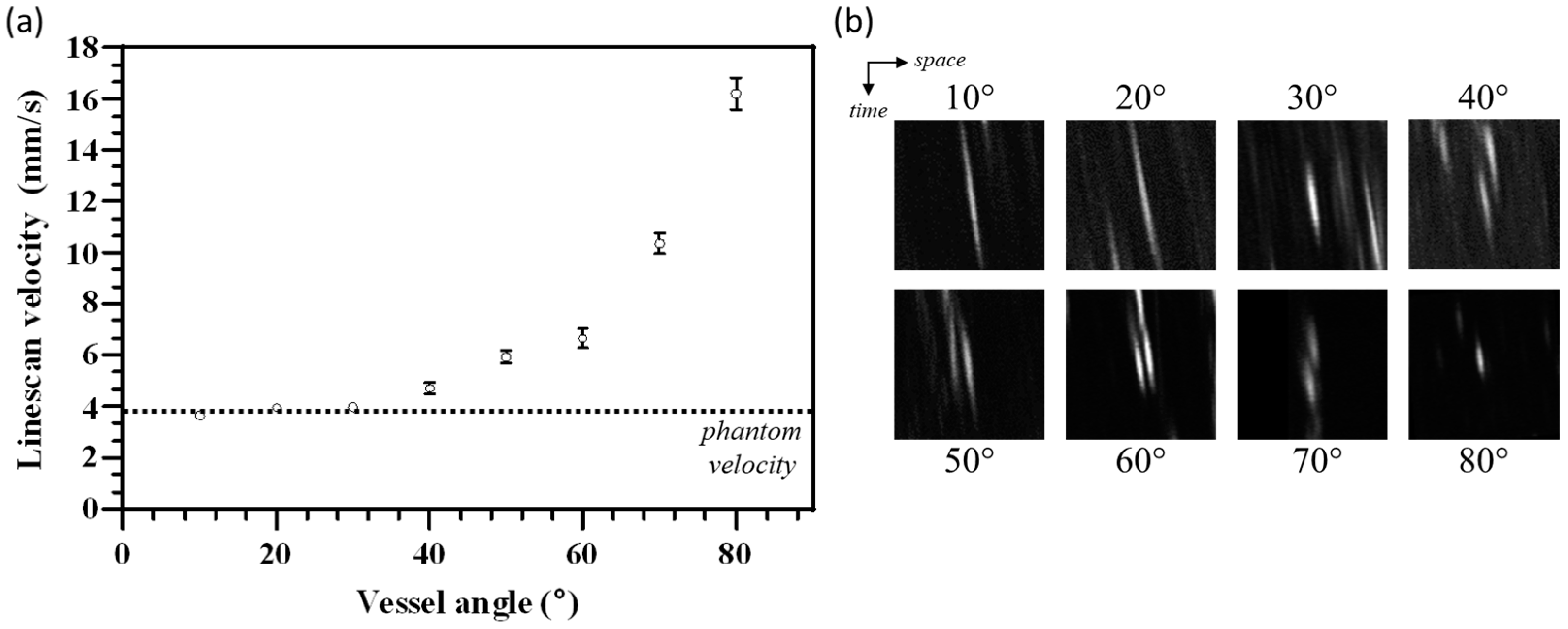
2.2. Phantom Calibration
2.3. Phantom Evaluation
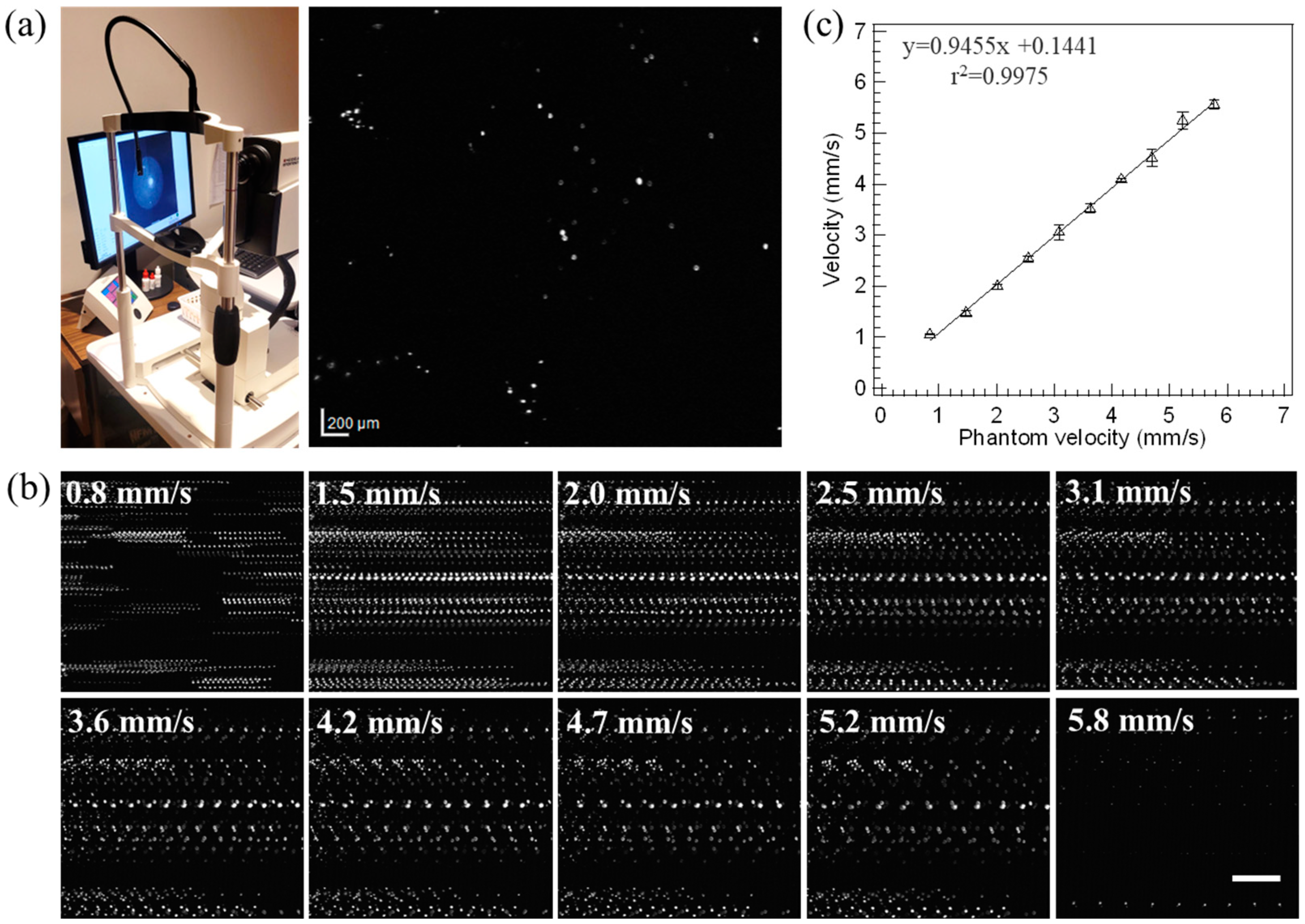
2.4. Clinical SLO Imaging
3. Results
3.1. Calibration Curves
3.2. AO-SLO Imaging
3.3. Clinical SLO Imaging/EMA
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Commercial Disclaimer
References
- Sehi, M.; Goharian, I.; Konduru, R.; Tan, O.; Srinivas, S.; Sadda, S.R.; Francis, B.A.; Huang, D.; Greenfield, D.S. Retinal blood flow in glaucomatous eyes with single-hemifield damage. Ophthalmology 2014, 121, 750–758. [Google Scholar] [CrossRef] [PubMed]
- Cherecheanu, A.P.; Garhofer, G.; Schmidl, D.; Werkmeister, R.; Schmetterer, L. Ocular perfusion pressure and ocular blood flow in glaucoma. Curr. Opin. Pharmacol. 2013, 13, 36–42. [Google Scholar] [CrossRef]
- Taylor, T.R.P.; Menten, M.J.; Rueckert, D.; Sivaprasad, S.; Lotery, A.J. The role of the retinal vasculature in age-related macular degeneration: A spotlight on OCTA. Eye 2024, 38, 442–449. [Google Scholar] [CrossRef] [PubMed]
- Mujat, M.; Sampani, K.; Patel, A.H.; Sun, J.K.; Iftimia, N. Cellular-level analysis of retinal blood vessel walls based on phase gradient images. Diagnostics 2023, 13, 3399. [Google Scholar] [CrossRef] [PubMed]
- Witt, N.; Wong, T.Y.; Hughes, A.D.; Chaturvedi, N.; Klein, B.E.; Evans, R.; McNamara, M.; Thom, S.A.M.; Klein, R. Abnormalities of retinal microvascular structure and risk of mortality from ischemic heart disease and stroke. Hypertension 2006, 47, 975–981. [Google Scholar] [CrossRef] [PubMed]
- Cheung, C.Y.; Ikram, M.K.; Chen, C.; Wong, T.Y. Imaging retina to study dementia and stroke. Prog. Retin. Eye Res. 2017, 57, 89–107. [Google Scholar] [CrossRef] [PubMed]
- Hanaguri, J.; Yokota, H.; Watanabe, M.; Yamagami, S.; Kushiyama, A.; Kuo, L.; Nagaoka, T. Retinal blood flow dysregulation precedes neural retinal dysfunction in type 2 diabetic mice. Sci. Rep. 2021, 11, 18401. [Google Scholar] [CrossRef] [PubMed]
- Nagaoka, T.; Sato, E.; Takahashi, A.; Yokota, H.; Sogawa, K.; Yoshida, A. Impaired retinal circulation in patients with type 2 diabetes mellitus: Retinal laser Doppler velocimetry study. Investig. Ophthalmol. Vis. Sci. 2010, 51, 6729–6734. [Google Scholar] [CrossRef] [PubMed]
- Bedggood, P.; Metha, A. Adaptive optics imaging of the retinal microvasculature. Clin. Exp. Optom. 2020, 103, 112–122. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Wang, D.; Pottenburgh, J.; Bower, A.J.; Asanad, S.; Lai, E.W.; Simon, C.; Im, L.; Huryn, L.A.; Tao, Y.; et al. Visualization of erythrocyte stasis in the living human eye in health and disease. iScience 2023, 26, 105755. [Google Scholar] [CrossRef]
- Joseph, A.; Guevara-Torres, A.; Schallek, J. Imaging single-cell blood flow in the smallest to largest vessels in the living retina. Elife 2019, 8, e45077. [Google Scholar] [CrossRef] [PubMed]
- Gu, B.; Wang, X.; Twa, M.D.; Tam, J.; Girkin, C.A.; Zhang, Y. Noninvasive in vivo characterization of erythrocyte motion in human retinal capillaries using high-speed adaptive optics near-confocal imaging. Biomed. Opt. Express 2018, 9, 3653–3677. [Google Scholar] [CrossRef]
- Bedggood, P.; Metha, A. Direct visualization and characterization of erythrocyte flow in human retinal capillaries. Biomed. Opt. Express 2012, 3, 3264–3277. [Google Scholar] [CrossRef] [PubMed]
- Tam, J.; Tiruveedhula, P.; Roorda, A. Characterization of single-file flow through human retinal parafoveal capillaries using an adaptive optics scanning laser ophthalmoscope. Biomed. Opt. Express 2011, 2, 781–793. [Google Scholar] [CrossRef] [PubMed]
- Martin, J.A.; Roorda, A. Direct and noninvasive assessment of parafoveal capillary leukocyte velocity. Ophthalmology 2005, 112, 2219–2224. [Google Scholar] [CrossRef] [PubMed]
- Chui, T.Y.; Gast, T.J.; Burns, S.A. Imaging of vascular wall fine structure in the human retina using adaptive optics scanning laser ophthalmoscopy. Investig. Ophthalmol. Vis. Sci. 2013, 54, 7115–7124. [Google Scholar] [CrossRef] [PubMed]
- Koch, E.; Rosenbaum, D.; Brolly, A.; Sahel, J.A.; Chaumet-Riffaud, P.; Girerd, X.; Rossant, F.; Paques, M. Morphometric analysis of small arteries in the human retina using adaptive optics imaging: Relationship with blood pressure and focal vascular changes. J. Hypertens. 2014, 32, 890–898. [Google Scholar] [CrossRef]
- Zhong, Z.; Petrig, B.L.; Qi, X.; Burns, S.A. In vivo measurement of erythrocyte velocity and retinal blood flow using adaptive optics scanning laser ophthalmoscopy. Opt. Express 2008, 16, 12746–12756. [Google Scholar] [CrossRef]
- Burns, S.A.; Elsner, A.E.; Sapoznik, K.A.; Warner, R.L.; Gast, T.J. Adaptive optics imaging of the human retina. Prog. Retin. Eye Res. 2019, 68, 1–30. [Google Scholar] [CrossRef]
- Bedggood, P.; Metha, A. Mapping flow velocity in the human retinal capillary network with pixel intensity cross correlation. PLoS ONE 2019, 14, e0218918. [Google Scholar] [CrossRef]
- Liu, Z.; Saeedi, O.; Zhang, F.; Villanueva, R.; Asanad, S.; Agrawal, A.; Hammer, D.X. Quantification of Retinal Ganglion Cell Morphology in Human Glaucomatous Eyes. Investig. Ophthalmol. Vis. Sci. 2021, 62, 34. [Google Scholar] [CrossRef] [PubMed]
- Chen, V.Y.; Le, C.T.; Pottenburgh, J.; Siddiqui, A.; Park, A.; Asanad, S.; Magder, L.; Im, L.T.; Saeedi, O.J. A pilot study assessing retinal blood flow dysregulation in glaucoma using erythrocyte mediated velocimetry. Transl. Vision. Sci. Technol. 2022, 11, 19. [Google Scholar] [CrossRef] [PubMed]
- Burns, S.A.; Elsner, A.E.; Gast, T.J. Imaging the Retinal Vasculature. Annu. Rev. Vis. Sci. 2021, 7, 129–153. [Google Scholar] [CrossRef] [PubMed]
- Riva, C.E.; Sinclair, S.H.; Grunwald, J.E. Autoregulation of retinal circulation in response to decrease of perfusion pressure. Investig. Ophthalmol. Vis. Sci. 1981, 21 Pt 1, 34–38. [Google Scholar]
- Warner, R.L.; Gast, T.J.; Sapoznik, K.A.; Carmichael-Martins, A.; Burns, S.A. Measuring Temporal and Spatial Variability of Red Blood Cell Velocity in Human Retinal Vessels. Investig. Ophthalmol. Vis. Sci. 2021, 62, 29. [Google Scholar] [CrossRef] [PubMed]
- Agrawal, A.; Connors, M.; Beylin, A.; Liang, C.P.; Barton, D.; Chen, Y.; Drezek, R.A.; Pfefer, T.J. Characterizing the point spread function of retinal OCT devices with a model eye-based phantom. Biomed. Opt. Express 2012, 3, 1116–1126. [Google Scholar] [CrossRef] [PubMed]
- Kedia, N.; Liu, Z.; Sochol, R.D.; Tam, J.; Hammer, D.X.; Agrawal, A. 3-D printed photoreceptor phantoms for evaluating lateral resolution of adaptive optics imaging systems. Opt. Lett. 2019, 44, 1825–1828. [Google Scholar] [CrossRef] [PubMed]
- Okubo, T.; Mino, T. Design and fabrication of a long-term stable model eye for OCT retinal imaging. In Proceedings of the SPIE Optical Coherence Tomography and Coherence Domain Optical Methods in Biomedicine XXVII, San Francisco, CA, USA, 28 January–3 February 2023. [Google Scholar]
- Lee, H.-J.; Samiudin, N.M.; Lee, T.G.; Doh, I.; Lee, S.-W. Retina phantom for the evaluation of optical coherence tomography angiography based on microfluidic channels. Biomed. Opt. Express 2019, 10, 5535–5548. [Google Scholar] [CrossRef] [PubMed]
- Chiaravalli, G.; Guidoboni, G.; Sacco, R.; Radell, J.; Harris, A. A multi-scale/multi-physics model for the theoretical study of the vascular configuration of retinal capillary plexuses based on OCTA data. Math. Med. Biol. A J. IMA 2022, 39, 77–104. [Google Scholar] [CrossRef]
- Guidoboni, G.; Harris, A.; Cassani, S.; Arciero, J.; Siesky, B.; Amireskandari, A.; Tobe, L.; Egan, P.; Januleviciene, I.; Park, J. Intraocular pressure, blood pressure, and retinal blood flow autoregulation: A mathematical model to clarify their relationship and clinical relevance. Investig. Ophthalmol. Vis. Sci. 2014, 55, 4105–4118. [Google Scholar] [CrossRef]
- Liu, D.; Wood, N.; Witt, N.; Hughes, A.; Thom, S.; Xu, X. Computational analysis of oxygen transport in the retinal arterial network. Curr. Eye Res. 2009, 34, 945–956. [Google Scholar] [CrossRef]
- Sampson, D.M.; Dubis, A.M.; Chen, F.K.; Zawadzki, R.J.; Sampson, D.D. Towards standardizing retinal optical coherence tomography angiography: A review. Light. Sci. Appl. 2022, 11, 63. [Google Scholar] [CrossRef] [PubMed]
- Saeedi, O.; Ou, M.; Kalarn, S.; Jones, A.; Toledo, L.; Im, L.; Quigley, H.A. Erythrocyte Mediated Angiography: Use of a Novel Method to Determine Erythrocyte Dynamics in the Glaucomatous Optic Nerve. Investig. Ophthalmol. Vis. Sci. 2017, 58, 3130. [Google Scholar]
- Liu, Z.; Tam, J.; Saeedi, O.; Hammer, D.X. Trans-retinal cellular imaging with multimodal adaptive optics. Biomed. Opt. Express 2018, 9, 4246–4262. [Google Scholar] [CrossRef]
- Raghavendra, A.; Chen, V.; Liu, Z.; Hammer, D.; Saeedi, O. Quantitative retinal blood flow measurement in humans using adaptive optics scanning laser ophthalmoscopy and erythrocyte mediated angiography. In Proceedings of the SPIE Ophthalmic Technologies XXXIII, San Francisco, CA, USA, 28 January–3 February 2023. [Google Scholar]
- Tinevez, J.Y.; Perry, N.; Schindelin, J.; Hoopes, G.M.; Reynolds, G.D.; Laplantine, E.; Bednarek, S.Y.; Shorte, S.L.; Eliceiri, K.W. TrackMate: An open and extensible platform for single-particle tracking. Methods 2017, 115, 80–90. [Google Scholar] [CrossRef]
- Jaqaman, K.; Loerke, D.; Mettlen, M.; Kuwata, H.; Grinstein, S.; Schmid, S.L.; Danuser, G. Robust single-particle tracking in live-cell time-lapse sequences. Nat. Methods 2008, 5, 695–702. [Google Scholar] [CrossRef]
- Chhatbar, P.Y.; Kara, P. Improved blood velocity measurements with a hybrid image filtering and iterative Radon transform algorithm. Front. Neurosci. 2013, 7, 106. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Anderson, T.; Dubra, A. Retinal magnification factors at the fixation locus derived from schematic eyes with four individualized surfaces. Biomed. Opt. Express 2022, 13, 3786–3808. [Google Scholar] [CrossRef] [PubMed]
- Rudnicka, A.R.; Burk, R.O.; Edgar, D.F.; Fitzke, F.W. Magnification characteristics of fundus imaging systems. Ophthalmology 1998, 105, 2186–2192. [Google Scholar] [CrossRef] [PubMed]
- Bennett, A.G.; Rudnicka, A.R.; Edgar, D.F. Improvements on Littmann’s method of determining the size of retinal features by fundus photography. Graefe’s Arch. Clin. Exp. Ophthalmol. 1994, 232, 361–367. [Google Scholar] [CrossRef]
- Bengtsson, B.; Krakau, C. Some essential optical features of the Zeiss fundus camera. Acta Ophthalmol. 1977, 55, 123–131. [Google Scholar] [CrossRef] [PubMed]
- Garway-Heath, D.F.; Rudnicka, A.R.; Lowe, T.; Foster, P.J.; Fitzke, F.W.; Hitchings, R.A. Measurement of optic disc size: Equivalence of methods to correct for ocular magnification. Br. J. Ophthalmol. 1998, 82, 643–649. [Google Scholar] [CrossRef] [PubMed]
- Sampson, D.M.; Gong, P.; An, D.; Menghini, M.; Hansen, A.; Mackey, D.A.; Sampson, D.D.; Chen, F.K. Axial length variation impacts on superficial retinal vessel density and foveal avascular zone area measurements using optical coherence tomography angiography. Investig. Ophthalmol. Vis. Sci. 2017, 58, 3065–3072. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.Y.; Huang, E.J.C.; Kuo, C.N.; Wu, P.L.; Chen, C.L.; Wu, P.C.; Wu, S.H.; King, Y.C.; Lai, C.H. The relationship between age, axial length and retinal nerve fiber layer thickness in the normal elderly population in Taiwan: The Chiayi eye study in Taiwan. PLoS ONE 2018, 13, e0194116. [Google Scholar] [CrossRef] [PubMed]
- Savini, G.; Barboni, P.; Parisi, V.; Carbonelli, M. The influence of axial length on retinal nerve fibre layer thickness and optic-disc size measurements by spectral-domain OCT. Br. J. Ophthalmol. 2011, 96, 57–61. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Milner, T.E.; Dave, D.; Nelson, J.S. Optical Doppler tomographic imaging of fluid flow velocity in highly scattering media. Opt. Lett. 1997, 22, 64–66. [Google Scholar] [CrossRef] [PubMed]
- Baxi, J.; Calhoun, W.; Sepah, Y.J.; Hammer, D.X.; Ilev, I.; Joshua Pfefer, T.; Nguyen, Q.D.; Agrawal, A. Retina-simulating phantom for optical coherence tomography. J. Biomed. Opt. 2014, 19, 021106. [Google Scholar] [CrossRef] [PubMed]
- Rowe, T.S.; Zawadzki, R.J. New developments in eye models with retina tissue phantoms for ophthalmic optical coherence tomography. In Proceedings of the SPIE Optical Diagnostics and Sensing XII: Toward Point-of-Care Diagnostics, and Design and Performance Validation of Phantoms Used in Conjunction with Optical Measurement of Tissue IV, San Francisco, CA, USA, 21–26 January 2012. [Google Scholar]
- Horng, H.; O’Brien, K.; Lamont, A.; Sochol, R.D.; Pfefer, T.J.; Chen, Y. 3D printed vascular phantoms for high-resolution biophotonic image quality assessment via direct laser writing. Opt. Lett. 2021, 46, 1987–1990. [Google Scholar] [CrossRef]
- Tokayer, J.; Jia, Y.; Dhalla, A.-H.; Huang, D. Blood flow velocity quantification using split-spectrum amplitude-decorrelation angiography with optical coherence tomography. Biomed. Opt. Express 2013, 4, 1909–1924. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raghavendra, A.J.; Elhusseiny, A.M.; Agrawal, A.; Liu, Z.; Hammer, D.X.; Saeedi, O.J. Compact Linear Flow Phantom Model for Retinal Blood-Flow Evaluation. Diagnostics 2024, 14, 1615. https://doi.org/10.3390/diagnostics14151615
Raghavendra AJ, Elhusseiny AM, Agrawal A, Liu Z, Hammer DX, Saeedi OJ. Compact Linear Flow Phantom Model for Retinal Blood-Flow Evaluation. Diagnostics. 2024; 14(15):1615. https://doi.org/10.3390/diagnostics14151615
Chicago/Turabian StyleRaghavendra, Achyut J., Abdelrahman M. Elhusseiny, Anant Agrawal, Zhuolin Liu, Daniel X. Hammer, and Osamah J. Saeedi. 2024. "Compact Linear Flow Phantom Model for Retinal Blood-Flow Evaluation" Diagnostics 14, no. 15: 1615. https://doi.org/10.3390/diagnostics14151615