
Assessing the Efficacy of the Spectrum-Aided Vision Enhancer (SAVE) to Detect Acral Lentiginous Melanoma, Melanoma In Situ, Nodular Melanoma, and Superficial Spreading Melanoma



 ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Dataset
2.2. YOLO Architectures
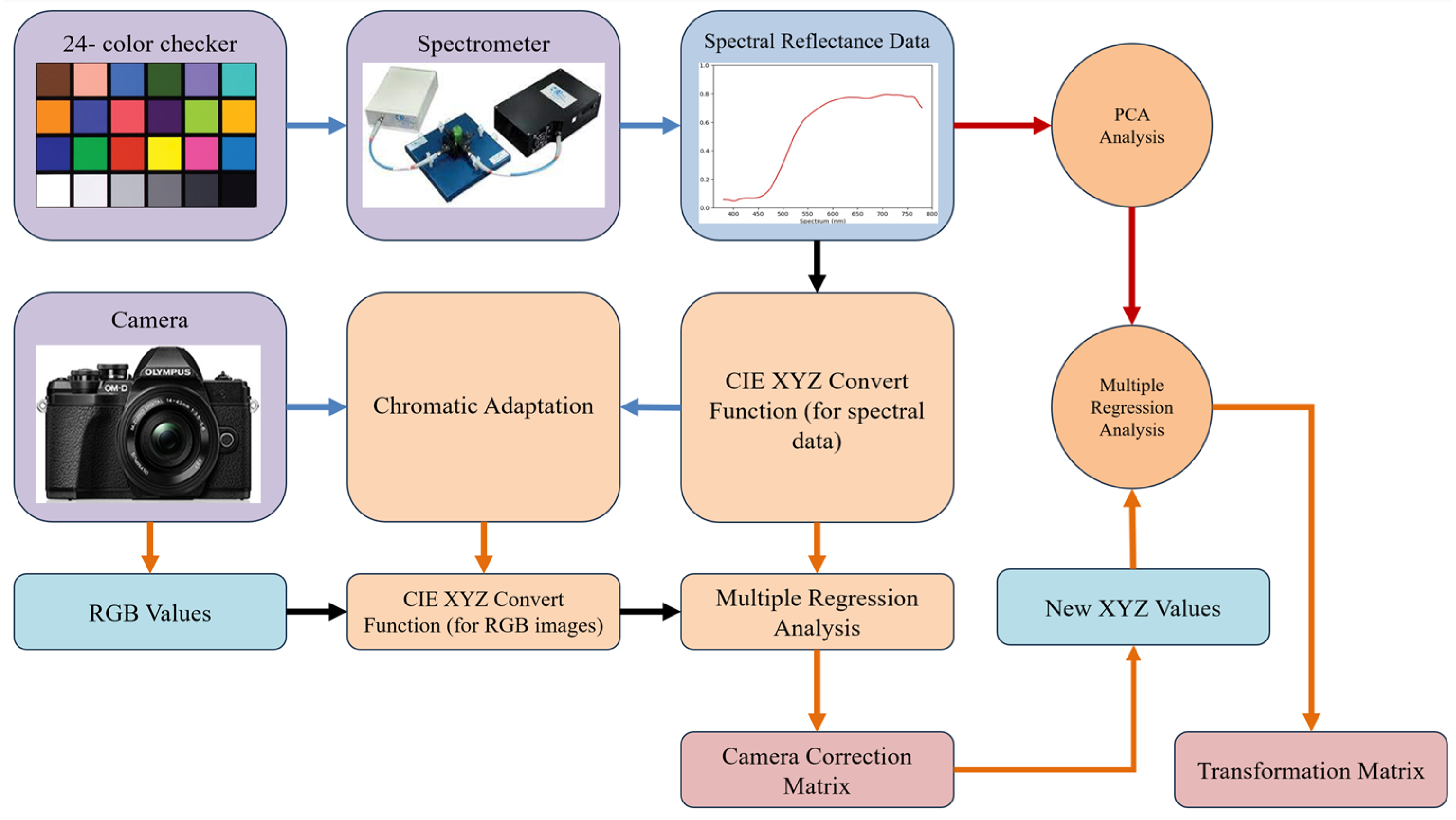
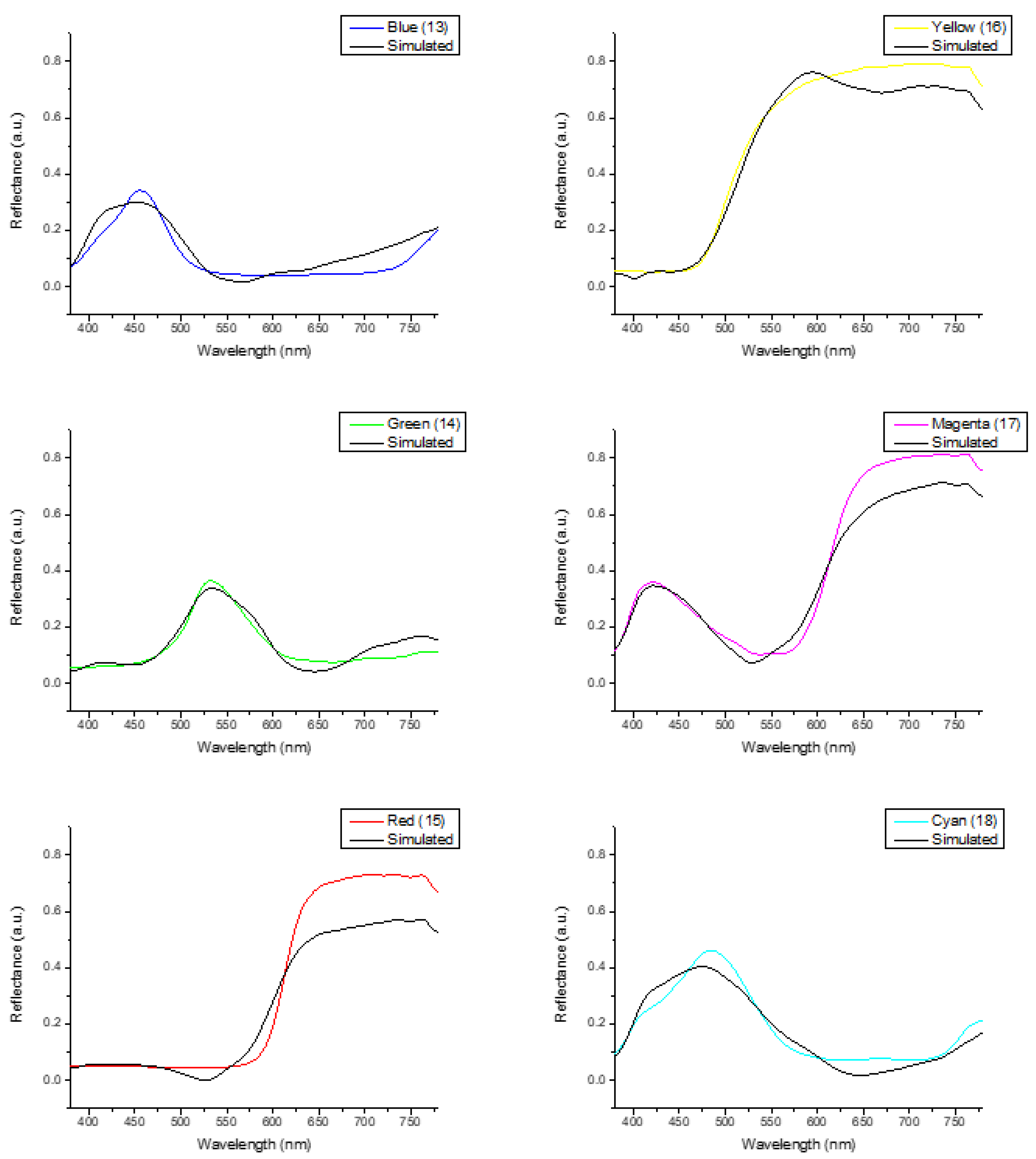
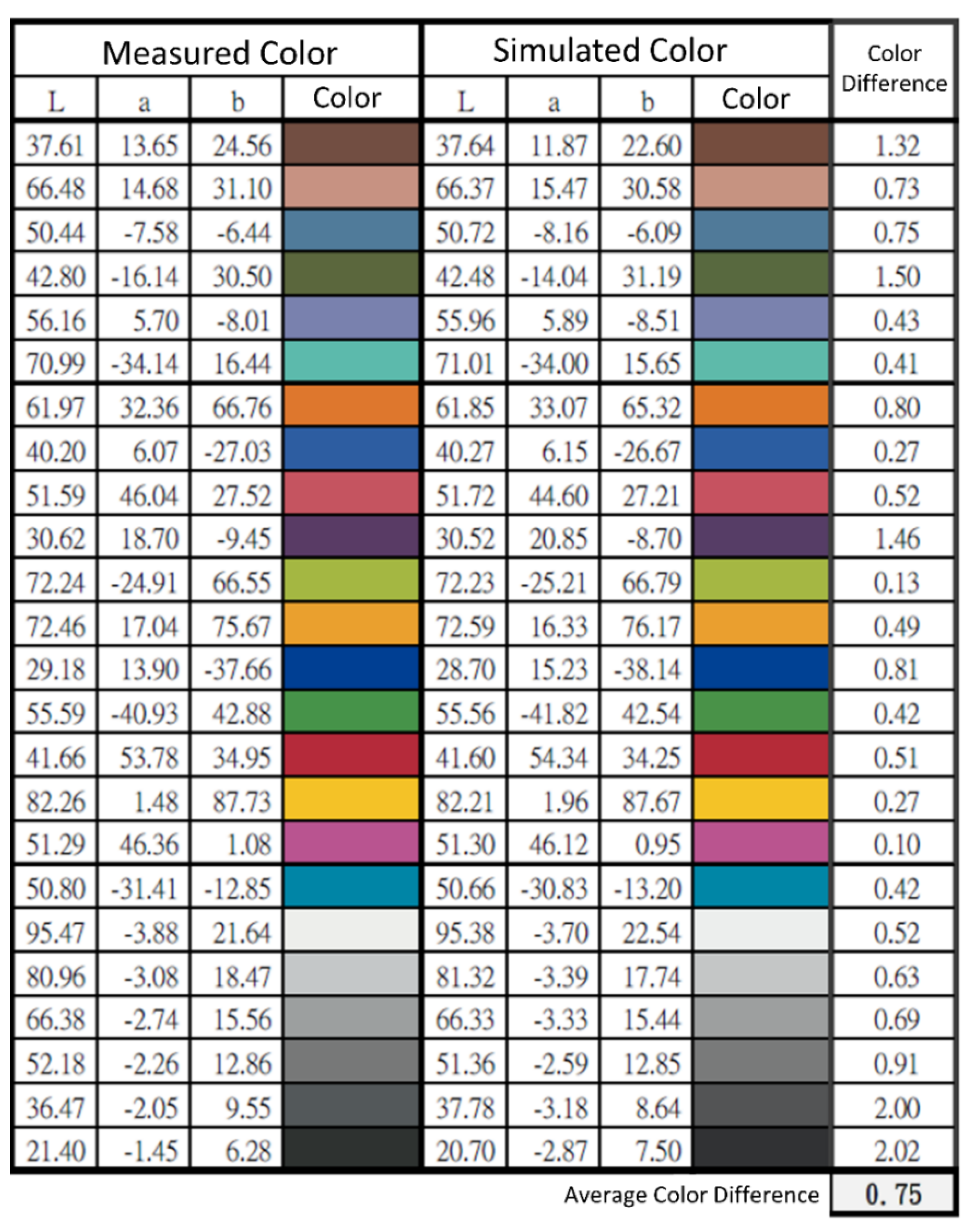
2.3. Spectrum-Aided Vision Enhancer
2.4. Band Selection
2.5. Evaluation Indices
3. Results
3.1. SAVE Performance Evaluation
3.2. Model Performance Evaluation
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Linares, M.A.; Zakaria, A.; Nizran, P. Skin cancer. Prim. Care Clin. Off. Pract. 2015, 42, 645–659. [Google Scholar] [CrossRef] [PubMed]
- Simoes, M.F.; Sousa, J.S.; Pais, A.C. Skin cancer and new treatment perspectives: A review. Cancer Lett. 2015, 357, 8–42. [Google Scholar] [CrossRef] [PubMed]
- Goydos, J.S.; Shoen, S.L. Acral lentiginous melanoma. Melanoma 2016, 321–329. [Google Scholar]
- Basurto-Lozada, P.; Molina-Aguilar, C.; Castaneda-Garcia, C.; Vázquez-Cruz, M.E.; Garcia-Salinas, O.I.; Álvarez-Cano, A.; Martínez-Said, H.; Roldán-Marín, R.; Adams, D.J.; Possik, P.A. Acral lentiginous melanoma: Basic facts, biological characteristics and research perspectives of an understudied disease. Pigment Cell Melanoma Res. 2021, 34, 59–71. [Google Scholar] [CrossRef] [PubMed]
- Balch, C.M.; Gershenwald, J.E.; Soong, S.-J.; Thompson, J.F.; Atkins, M.B.; Byrd, D.R.; Buzaid, A.C.; Cochran, A.J.; Coit, D.G.; Ding, S. Final version of 2009 AJCC melanoma staging and classification. J. Clin. Oncol. 2009, 27, 6199. [Google Scholar] [CrossRef] [PubMed]
- National Cancer Institute Surveillance, Epidemiology, and End Results (SEER) Program. Cancer Statistics, SEER Data & Software, Registry Operations. 2018. Available online: https://seer.cancer.gov/archive/csr/1975_2018/ (accessed on 27 July 2024).
- Higgins, H.W., II; Lee, K.C.; Galan, A.; Leffell, D.J. Melanoma in situ: Part, I. Epidemiology, screening, and clinical features. J. Am. Acad. Dermatol. 2015, 73, 181–190. [Google Scholar] [CrossRef] [PubMed]
- Corneli, P.; Zalaudek, I.; Magaton Rizzi, G.; di Meo, N. Improving the early diagnosis of early nodular melanoma: Can we do better? Expert Rev. Anticancer Ther. 2018, 18, 1007–1012. [Google Scholar] [CrossRef]
- Liu, W.; Dowling, J.P.; Murray, W.K.; McArthur, G.A.; Thompson, J.F.; Wolfe, R.; Kelly, J.W. Rate of growth in melanomas: Characteristics and associations of rapidly growing melanomas. Arch. Dermatol. 2006, 142, 1551–1558. [Google Scholar] [CrossRef] [PubMed]
- Dildar, M.; Akram, S.; Irfan, M.; Khan, H.U.; Ramzan, M.; Mahmood, A.R.; Alsaiari, S.A.; Saeed, A.H.M.; Alraddadi, M.O.; Mahnashi, M.H. Skin cancer detection: A review using deep learning techniques. Int. J. Environ. Res. Public Health 2021, 18, 5479. [Google Scholar] [CrossRef]
- Kousis, I.; Perikos, I.; Hatzilygeroudis, I.; Virvou, M. Deep learning methods for accurate skin cancer recognition and mobile application. Electronics 2022, 11, 1294. [Google Scholar] [CrossRef]
- Mehr, R.A.; Ameri, A. Skin cancer detection based on deep learning. J. Biomed. Phys. Eng. 2022, 12, 559. [Google Scholar]
- Agrahari, P.; Agrawal, A.; Subhashini, N. Skin cancer detection using deep learning. In Proceedings of the Futuristic Communication and Network Technologies: Select Proceedings of VICFCNT 2020, Chennai, India, 6–7 November 2020; pp. 179–190. [Google Scholar]
- Lu, B.; Dao, P.D.; Liu, J.; He, Y.; Shang, J. Recent advances of hyperspectral imaging technology and applications in agriculture. Remote Sens. 2020, 12, 2659. [Google Scholar] [CrossRef]
- El Masry, G. Principles of hyperspectral imaging technology. In Hyperspectral Imaging for Food Quality Analysis and Control; Sun, D.-W., Ed.; Elsevier: Dublin, Ireland, 2010; pp. 3–43. [Google Scholar]
- Fei, B. Hyperspectral imaging in medical applications. In Data Handling in Science and Technology; Elsevier: Dublin, Ireland, 2019; Volume 32, pp. 523–565. [Google Scholar]
- Tsai, T.-J.; Mukundan, A.; Chi, Y.-S.; Tsao, Y.-M.; Wang, Y.-K.; Chen, T.-H.; Wu, I.-C.; Huang, C.-W.; Wang, H.-C. Intelligent Identification of Early Esophageal Cancer by Band-Selective Hyperspectral Imaging. Cancers 2022, 14, 4292. [Google Scholar] [CrossRef]
- Mukundan, A.; Tsao, Y.-M.; Wang, H.-C. Early esophageal detection using hyperspectral engineering and convolutional neural network. In Proceedings of the Optics in Health Care and Biomedical Optics XIII, Beijing, China, 14–16 October 2023; pp. 12–19. [Google Scholar]
- Yang, K.-Y.; Mukundan, A.; Tsao, Y.-M.; Shi, X.-H.; Huang, C.-W.; Wang, H.-C. Assessment of hyperspectral imaging and CycleGAN-simulated narrowband techniques to detect early esophageal cancer. Sci. Rep. 2023, 13, 20502. [Google Scholar] [CrossRef] [PubMed]
- Tsai, C.-L.; Mukundan, A.; Chung, C.-S.; Chen, Y.-H.; Wang, Y.-K.; Chen, T.-H.; Tseng, Y.-S.; Huang, C.-W.; Wu, I.-C.; Wang, H.-C. Hyperspectral imaging combined with artificial intelligence in the early detection of esophageal cancer. Cancers 2021, 13, 4593. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.-Y.; Hsiao, Y.-P.; Mukundan, A.; Tsao, Y.-M.; Chang, W.-Y.; Wang, H.-C. Classification of Skin Cancer Using Novel Hyperspectral Imaging Engineering via YOLOv5. J. Clin. Med. 2023, 12, 1134. [Google Scholar] [CrossRef]
- Sano, Y.; Tanaka, S.; Kudo, S.E.; Saito, S.; Matsuda, T.; Wada, Y.; Fujii, T.; Ikematsu, H.; Uraoka, T.; Kobayashi, N. Narrow-band imaging (NBI) magnifying endoscopic classification of colorectal tumors proposed by the Japan NBI Expert Team. Dig. Endosc. 2016, 28, 526–533. [Google Scholar] [CrossRef] [PubMed]
- Zheng, C.; Lv, Y.; Zhong, Q.; Wang, R.; Jiang, Q. Narrow band imaging diagnosis of bladder cancer: Systematic review and meta-analysis. BJU Int. 2012, 110, E680–E687. [Google Scholar] [CrossRef]
- Gono, K.; Obi, T.; Yamaguchi, M.; Ohyama, N.; Machida, H.; Sano, Y.; Yoshida, S.; Hamamoto, Y.; Endo, T. Appearance of enhanced tissue features in narrow-band endoscopic imaging. J. Biomed. Opt. 2004, 9, 568–577. [Google Scholar] [CrossRef]
- van Schaik, J.E.; Halmos, G.B.; Witjes, M.J.; Plaat, B.E. An overview of the current clinical status of optical imaging in head and neck cancer with a focus on Narrow Band imaging and fluorescence optical imaging. Oral Oncol. 2021, 121, 105504. [Google Scholar] [CrossRef]
- Kim, D.H.; Lee, M.H.; Lee, S.; Kim, S.W.; Hwang, S.H. Comparison of Narrowband Imaging and White-Light Endoscopy for Diagnosis and Screening of Nasopharyngeal Cancer. Otolaryngol. Head Neck Surg. 2022, 166, 795–801. [Google Scholar] [CrossRef] [PubMed]
- Ezoe, Y.; Muto, M.; Horimatsu, T.; Minashi, K.; Yano, T.; Sano, Y.; Chiba, T.; Ohtsu, A. Magnifying narrow-band imaging versus magnifying white-light imaging for the differential diagnosis of gastric small depressive lesions: A prospective study. Gastrointest. Endosc. 2010, 71, 477–484. [Google Scholar] [CrossRef] [PubMed]
- Ezoe, Y.; Muto, M.; Uedo, N.; Doyama, H.; Yao, K.; Oda, I.; Kaneko, K.; Kawahara, Y.; Yokoi, C.; Sugiura, Y. Magnifying narrowband imaging is more accurate than conventional white-light imaging in diagnosis of gastric mucosal cancer. Gastroenterology 2011, 141, 2017–2025.e3. [Google Scholar] [CrossRef] [PubMed]
- Park, J.-S.; Seo, D.-W.; Song, T.J.; Park, D.H.; Lee, S.S.; Lee, S.K.; Kim, M.-H. Usefulness of white-light imaging–guided narrow-band imaging for the differential diagnosis of small ampullary lesions. Gastrointest. Endosc. 2015, 82, 94–101. [Google Scholar] [CrossRef] [PubMed]
- Du Le, V.; Wang, Q.; Gould, T.; Ramella-Roman, J.C.; Pfefer, T.J. Vascular contrast in narrow-band and white light imaging. Appl. Opt. 2014, 53, 4061–4071. [Google Scholar] [CrossRef] [PubMed]
- Ren, J.; Wang, Z.; Zhang, Y.; Liao, L. YOLOv5-R: Lightweight real-time detection based on improved YOLOv5. J. Electron. Imaging 2022, 31, 033033. [Google Scholar] [CrossRef]
- Liu, H.; Sun, F.; Gu, J.; Deng, L. Sf-yolov5: A lightweight small object detection algorithm based on improved feature fusion mode. Sensors 2022, 22, 5817. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Xiao, T.; Gu, Q.; Chen, Q. YOLOv5_CSL_F: YOLOv5’s loss improvement and attention mechanism application for remote sensing image object detection. In Proceedings of the 2021 International Conference on Wireless Communications and Smart Grid (ICWCSG), Hangzhou, China, 13–15 August 2021; pp. 197–203. [Google Scholar]
- Hussain, M. YOLO-v1 to YOLO-v8, the rise of YOLO and its complementary nature toward digital manufacturing and industrial defect detection. Machines 2023, 11, 677. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 10–17 June 2018; pp. 8759–8768. [Google Scholar]
- Wang, C.-Y.; Liao, H.-Y.M.; Wu, Y.-H.; Chen, P.-Y.; Hsieh, J.-W.; Yeh, I.-H. CSPNet: A new backbone that can enhance learning capability of CNN. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 390–391. [Google Scholar]
- Wang, C.-Y.; Yeh, I.-H.; Liao, H.-Y.M. YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information. arXiv 2024, arXiv:2402.13616. [Google Scholar]
- Chien, C.-T.; Ju, R.-Y.; Chou, K.-Y.; Chiang, J.-S. YOLOv9 for Fracture Detection in Pediatric Wrist Trauma X-ray Images. arXiv 2024, arXiv:2403.11249. [Google Scholar] [CrossRef]
- Aziz, F.; Saputri, D.U.E. Efficient Skin Lesion Detection using YOLOv9 Network. J. Med. Inform. Technol. 2024, 2, 11–15. [Google Scholar] [CrossRef]
- Arisholm, E.; Briand, L.C.; Johannessen, E.B. A systematic and comprehensive investigation of methods to build and evaluate fault prediction models. J. Syst. Softw. 2010, 83, 2–17. [Google Scholar] [CrossRef]
- Gray, D.; Bowes, D.; Davey, N.; Sun, Y.; Christianson, B. Further thoughts on precision. In Proceedings of the 15th Annual Conference on Evaluation & Assessment in Software Engineering (EASE 2011), Durham, UK, 11–12 April 2011; pp. 129–133. [Google Scholar]
- Saito, T.; Rehmsmeier, M. The precision-recall plot is more informative than the ROC plot when evaluating binary classifiers on imbalanced datasets. PLoS ONE 2015, 10, e0118432. [Google Scholar] [CrossRef] [PubMed]
- Lipton, Z.C.; Elkan, C.; Narayanaswamy, B. Thresholding classifiers to maximize F1 score. arXiv 2014, arXiv:1402.1892. [Google Scholar]
- Henderson, P.; Ferrari, V. End-to-end training of object class detectors for mean average precision. In Proceedings of the Computer Vision–ACCV 2016: 13th Asian Conference on Computer Vision, Taipei, Taiwan, 20–24 November 2016; pp. 198–213, (revised 2017). [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Training | Validation | Testing |
|---|---|---|---|
| Acral Lentignious Melanoma | 239 | 69 | 34 |
| Melanoma in Situ | 128 | 37 | 18 |
| Nodular Melanoma | 70 | 20 | 10 |
| Superficial Spreading Melanoma | 178 | 50 | 25 |
| Total | 615 | 176 | 87 |
| S. No | Before Calibration | After Calibration | RMSE | SD | ||||
|---|---|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | |||
| 1 | 10.96 | 9.92 | 4.63 | 11.14 | 9.87 | 4.26 | 0.24 | 0.30 |
| 2 | 38.74 | 35.80 | 18.65 | 38.57 | 35.94 | 18.66 | 0.13 | 0.08 |
| 3 | 16.62 | 19.07 | 24.13 | 16.48 | 18.79 | 24.11 | 0.18 | 0.17 |
| 4 | 10.33 | 12.86 | 4.62 | 10.16 | 13.03 | 4.85 | 0.19 | 0.19 |
| 5 | 24.05 | 23.87 | 31.55 | 24.16 | 24.07 | 31.60 | 0.13 | 0.08 |
| 6 | 30.12 | 42.15 | 32.40 | 30.10 | 42.17 | 32.42 | 0.02 | 0.002 |
| 7 | 38.10 | 30.24 | 4.28 | 38.04 | 30.37 | 4.22 | 0.09 | 0.04 |
| 8 | 11.70 | 11.47 | 25.90 | 11.64 | 11.37 | 25.91 | 0.07 | 0.02 |
| 9 | 29.01 | 19.91 | 9.62 | 29.20 | 19.78 | 9.60 | 0.13 | 0.08 |
| 10 | 8.26 | 6.49 | 9.63 | 8.06 | 6.49 | 9.86 | 0.18 | 0.17 |
| 11 | 34.15 | 44.06 | 8.44 | 34.15 | 44.02 | 8.53 | 0.06 | 0.01 |
| 12 | 47.99 | 44.55 | 6.05 | 48.05 | 44.34 | 6.17 | 0.15 | 0.11 |
| 13 | 6.82 | 5.79 | 21.07 | 6.90 | 5.91 | 21.00 | 0.09 | 0.04 |
| 14 | 14.55 | 23.55 | 7.22 | 14.58 | 23.51 | 7.12 | 0.07 | 0.02 |
| 15 | 21.08 | 12.25 | 3.57 | 21.01 | 12.28 | 3.65 | 0.06 | 0.01 |
| 16 | 58.40 | 60.69 | 7.54 | 58.38 | 60.79 | 7.42 | 0.09 | 0.04 |
| 17 | 28.98 | 19.54 | 20.67 | 28.94 | 19.52 | 20.66 | 0.02 | 0.002 |
| 18 | 12.81 | 19.01 | 28.54 | 12.84 | 19.10 | 28.56 | 0.05 | 0.01 |
| 19 | 82.12 | 88.54 | 67.20 | 82.31 | 88.73 | 67.51 | 0.24 | 0.30 |
| 20 | 54.74 | 58.92 | 45.52 | 54.28 | 58.40 | 44.75 | 0.60 | 1.89 |
| 21 | 33.08 | 35.73 | 27.24 | 33.26 | 35.82 | 27.54 | 0.21 | 0.23 |
| 22 | 18.18 | 19.62 | 14.94 | 18.86 | 20.31 | 15.62 | 0.68 | 2.43 |
| 23 | 9.13 | 10.01 | 8.13 | 8.56 | 9.26 | 7.21 | 0.76 | 3.04 |
| 24 | 2.87 | 3.19 | 2.39 | 3.10 | 3.35 | 2.68 | 0.23 | 0.27 |
| Average | 0.19 | 0.39 | ||||||
| Model | Image Modality | Precision | Recall | mAp | F1-Score |
|---|---|---|---|---|---|
| YOLO v5 | RGB | 0.804 | 0.716 | 0.797 | 0.751 |
| SAVE | 0.799 | 0.829 | 0.819 | 0.810 | |
| YOLO v8 | RGB | 0.843 | 0.755 | 0.807 | 0.795 |
| SAVE | 0.904 | 0.710 | 0.801 | 0.794 | |
| YOLO v9 | RGB | 0.806 | 0.605 | 0.737 | 0.65 |
| SAVE | 0.783 | 0.666 | 0.775 | 0.71 | |
| YOLO-NAS | RGB | 0.733 | 0.541 | 0.659 | 0.623 |
| SAVE | 0.731 | 0.665 | 0.690 | 0.69 | |
| Roboflow 3.0 | RGB | 0.719 | 0.643 | 0.660 | 0.675 |
| SAVE | 0.781 | 0.613 | 0.680 | 0.68 |
| Architecture | Model | Skin Cancer Types | Precision | Recall | mAP50 | mAP 50–95 |
|---|---|---|---|---|---|---|
| YOLO v-5 | RGB | Acral Lentiginous Melanoma | 0.865 | 0.875 | 0.966 | 0.6 |
| Melanoma in Situ | 0.78 | 0.545 | 0.597 | 0.323 | ||
| Nodular Melanoma | 0.732 | 0.9 | 0.932 | 0.679 | ||
| Superficial Spreading Melanoma | 0.784 | 0.542 | 0.612 | 0.33 | ||
| SAVE | Acral Lentiginous Melanoma | 0.919 | 0.812 | 0.903 | 0.551 | |
| Melanoma in Situ | 0.551 | 0.455 | 0.481 | 0.223 | ||
| Nodular Melanoma | 0.84 | 0.8 | 0.842 | 0.6 | ||
| Superficial Spreading Melanoma | 0.669 | 0.625 | 0.598 | 0.299 | ||
| YOLO v-8 | RGB | Acral Lentiginous Melanoma | 0.938 | 0.95 | 0.965 | 0.562 |
| Melanoma in Situ | 0.685 | 0.545 | 0.608 | 0.294 | ||
| Nodular Melanoma | 0.867 | 0.9 | 0.932 | 0.62 | ||
| Superficial Spreading Melanoma | 0.882 | 0.623 | 0.725 | 0.419 | ||
| SAVE | Acral Lentiginous Melanoma | 0.946 | 0.812 | 0.957 | 0.55 | |
| Melanoma in Situ | 0.859 | 0.555 | 0.7 | 0.286 | ||
| Nodular Melanoma | 0.851 | 0.9 | 0.891 | 0.631 | ||
| Superficial Spreading Melanoma | 0.875 | 0.582 | 0.639 | 0.338 | ||
| YOLO v-9 | RGB | Acral Lentiginous Melanoma | 0.657 | 0.846 | 0.814 | 0.508 |
| Melanoma in Situ | 0.949 | 0.667 | 0.826 | 0.46 | ||
| Nodular Melanoma | 0.882 | 0.231 | 0.533 | 0.33 | ||
| Superficial Spreading Melanoma | 0.737 | 0.676 | 0.776 | 0.472 | ||
| SAVE | Acral Lentiginous Melanoma | 0.849 | 1 | 0.995 | 0.4 | |
| Melanoma in Situ | 0.798 | 0.607 | 0.749 | 0.45 | ||
| Nodular Melanoma | 0.755 | 0.571 | 0.765 | 0.416 | ||
| Superficial Spreading Melanoma | 0.73 | 0.484 | 0.579 | 0.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, T.-L.; Lu, C.-T.; Karmakar, R.; Nampalley, K.; Mukundan, A.; Hsiao, Y.-P.; Hsieh, S.-C.; Wang, H.-C. Assessing the Efficacy of the Spectrum-Aided Vision Enhancer (SAVE) to Detect Acral Lentiginous Melanoma, Melanoma In Situ, Nodular Melanoma, and Superficial Spreading Melanoma. Diagnostics 2024, 14, 1672. https://doi.org/10.3390/diagnostics14151672
Lin T-L, Lu C-T, Karmakar R, Nampalley K, Mukundan A, Hsiao Y-P, Hsieh S-C, Wang H-C. Assessing the Efficacy of the Spectrum-Aided Vision Enhancer (SAVE) to Detect Acral Lentiginous Melanoma, Melanoma In Situ, Nodular Melanoma, and Superficial Spreading Melanoma. Diagnostics. 2024; 14(15):1672. https://doi.org/10.3390/diagnostics14151672
Chicago/Turabian StyleLin, Teng-Li, Chun-Te Lu, Riya Karmakar, Kalpana Nampalley, Arvind Mukundan, Yu-Ping Hsiao, Shang-Chin Hsieh, and Hsiang-Chen Wang. 2024. "Assessing the Efficacy of the Spectrum-Aided Vision Enhancer (SAVE) to Detect Acral Lentiginous Melanoma, Melanoma In Situ, Nodular Melanoma, and Superficial Spreading Melanoma" Diagnostics 14, no. 15: 1672. https://doi.org/10.3390/diagnostics14151672
APA StyleLin, T.-L., Lu, C.-T., Karmakar, R., Nampalley, K., Mukundan, A., Hsiao, Y.-P., Hsieh, S.-C., & Wang, H.-C. (2024). Assessing the Efficacy of the Spectrum-Aided Vision Enhancer (SAVE) to Detect Acral Lentiginous Melanoma, Melanoma In Situ, Nodular Melanoma, and Superficial Spreading Melanoma. Diagnostics, 14(15), 1672. https://doi.org/10.3390/diagnostics14151672