Changes in Surface Topography and Light Load Hardness in Thrust Bearings as a Reason of Tribo-Electric Loads



Abstract
1. Introduction
2. Test Setup
- Test series A—axial load 4000 N (C0/P 19);
- Test series B—axial load 6000 N (C0/P 13);
- Test series C—axial load 8000 N (C0/P 10).
3. Test Procedure and Measured Variables
3.1. Acceleration Measurement
3.2. Confocal and Light Microscopy of the Rolling Elements and Raceway Surfaces
3.3. Light Load Hardness
3.4. Determination of Wear Weights
4. Results
4.1. Electrical Load over Time
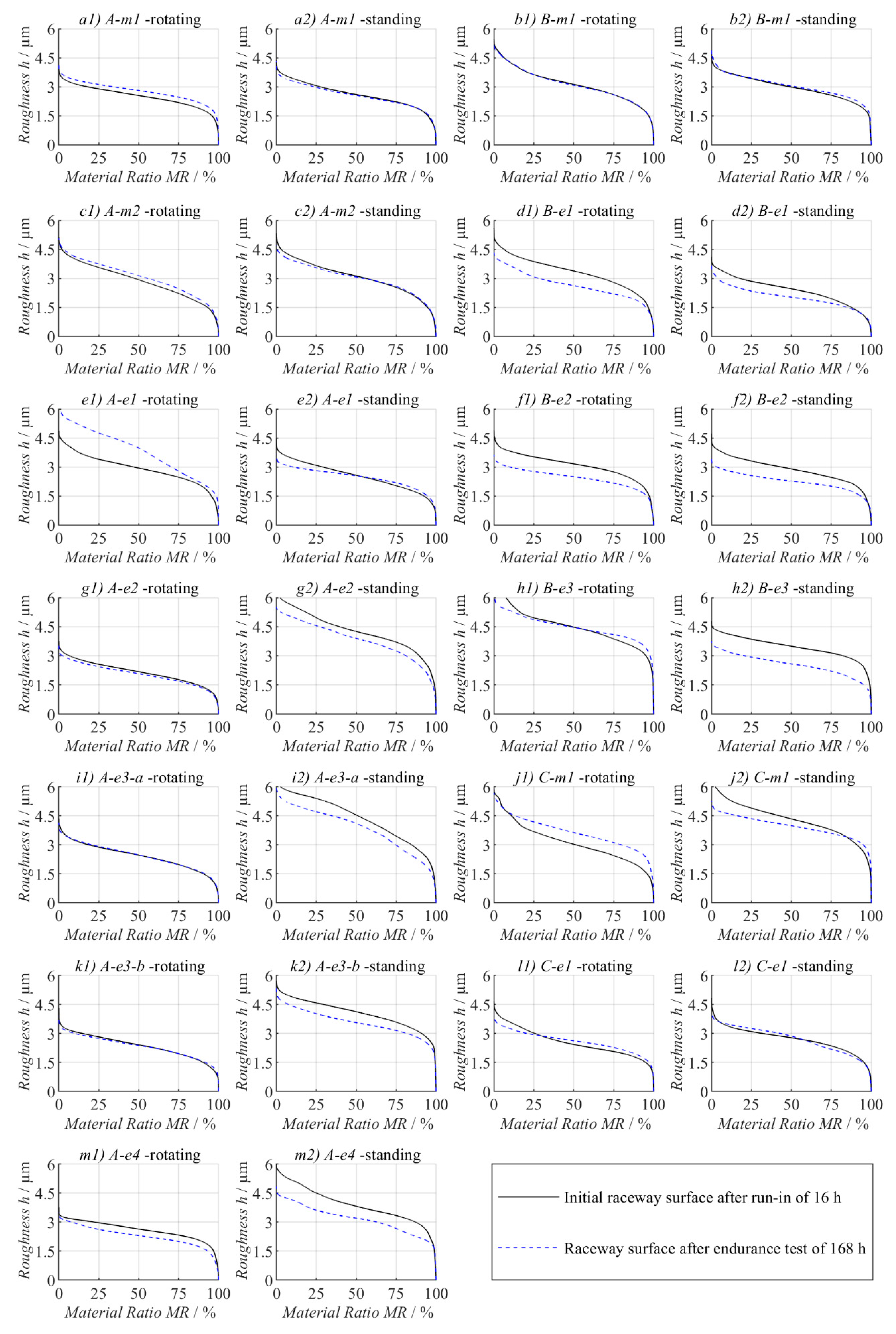
4.2. Surface Topography
4.3. Acceleration Detection
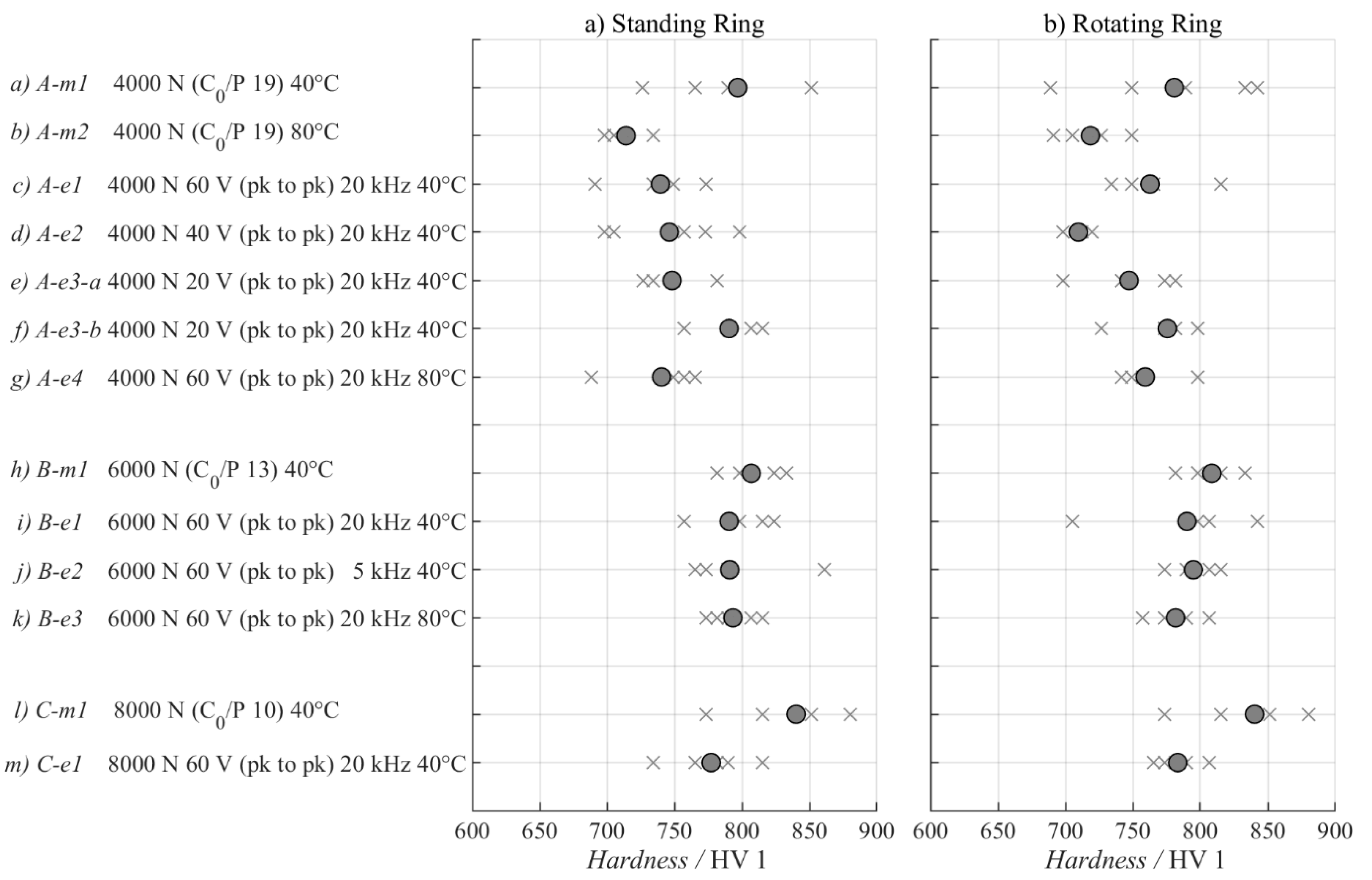
4.4. Light Load Hardness
4.5. Wear Weight
5. Discussion of the Findings
5.1. Surface Topography—Significant
5.2. Acceleration Analysis—Assisting Interpretation
5.3. Light Load Hardness—Further Research Necessary
5.4. Wear Mass—Possibly Too Short Test Duration
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ammann, C.; Reichert, K.; Joho, R.; Posedel, Z. Shaft voltages in generators with static excitation systems-problems and solution, Energy Conversion. IEEE Trans. 1988, 3, 409–419. [Google Scholar]
- Kerszenbaum, I. Shaft currents in electric machines fed by solid-state drives. In Proceedings of the 1992 IEEE Conference Record of the Industrial and Commercial Power Systems Technical Conference, Pittsburgh, PA, USA, 4–7 May 1992; pp. 71–79. [Google Scholar]
- Preisinger, G. Cause and Effect of Bearing Currents in Frequency Converter Driven Electrical Motor, Investigations of Electrical Properties of Rolling Bearings. Ph.D. Thesis, Technische Universität Wien, Vienna, Austria, 2002. [Google Scholar]
- Recker, C.; Weicker, M. Einfluss der elektrischen Schmierfettleitfähigkeit auf die Ausbildung von Lagerströmen bei umrichterbetriebenen 1.5 kW-Asynchronmotoren. In Proceedings of the 5th VDI-Fachkonferenz—Schadensmechanismen an Lagern, Aachen, Germany, 28–29 June 2022. [Google Scholar]
- Zika, T. Electric Discharge Damaging in Lubricated Rolling Contacts. Ph.D. Thesis, Technische Universität Wien, Vienna, Austria, 2010. [Google Scholar]
- Spikes, H.A. Triboelectrochemistry: Influence of Applied Electrical Potentials on Friction and Wear of Lubricated Contacts. Tribol. Lett. 2020, 68, 1–27. [Google Scholar] [CrossRef]
- García Tuero, A.; Rivera, N.; Rodríguez, E.; Fernández-González, A.; Viesca, J.L.; Hernandez Battez, A. Influence of Additives Concentration on the Electrical Properties and the Tribological Behaviour of Three Automatic Transmission Fluids. Lubricants 2022, 10, 276. [Google Scholar] [CrossRef]
- Durkin, W.; Fish, G.; Dura, R. Compositional Effects on the Electrical Properties of Greases. In Proceedings of the ELGI Eurogrease Q2, Hamburg, Germany, 22 March 2022. [Google Scholar]
- Erdemir, A.; Farfan-Cabrera, L.; Anderson, W.B. Comparative Tri Comparative Tribological Properties of Commercial Drivetrain Lubricants under Electrified Sliding Contact Conditions. In Proceedings of the 2nd STLE Tribology & Lubrication for E-Mobility Conference, San Antonio, TX, USA, 30 November–2 December 2022. [Google Scholar]
- Holweger, W.; Bobbio, L.; Mo, Z.; Fliege, J.; Goerlach, B.; Simon, B. A Validated Computational Study of Lubricants under White Etching Crack Conditions Exposed to Electrical Fields. Lubricants 2023, 11, 45. [Google Scholar] [CrossRef]
- Graf, S.; Sauer, B. Surface mutation of the bearing raceway during electrical current passage in mixed friction operation. Bear. World J. 2021, 5, 137–147. [Google Scholar]
- Schneider, V.; Stockbrügger, J.O.; Poll, G.; Ponick, B. Abschlussbericht FVA 863 I—Stromdurchgang am Wälzlager–Verhalten Stromführender Wälzlager; Forschungsvereinigung Antriebstechnik e.V.: Frankfurt, Germany, 2022. [Google Scholar]
- Tischmacher, H. Systemanalysen zur Elektrischen Belastung von Wälzlagern bei Umrichtergespeisten Elektromotoren. Ph.D. Thesis, Gottfried Wilhelm Leibniz University, Hannover, Germany, 2017. [Google Scholar]
- Kohaut, A. Riffelbildung in Wälzlagern infolge elektrischer Korrosion. Z. Für Angew. Phys. 1948, 1, 197–211. [Google Scholar]
- Capan, R.; Graf, S.; Koch, O.; Sauer, B.; Safdarzadeh, O.; Weicker, M.; Binder, A. Abschlussbericht FVA 650 III—Stromdurchgang in Wälzlagern—Untersuchung von Oberflächenveränderungen und Folgeschäden an Wälzoberflächen durch Stromdurchgang; Forschungsvereinigung Antriebstechnik e.V.: Frankfurt, Germany, 2024. [Google Scholar]
- Muetze, A. Bearing Currents in Inverter-Fed AC Motors; Shaker Verlag: Darmstadt, Germany, 2004. [Google Scholar]
- Gemeinder, Y. Lagerimpedanz und Lagerschädigung bei Umrichtergespeisten Antrieben. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2016. [Google Scholar]
- Graf, S. Charakterisierung und Auswirkungen von Parasitären Lagerströmen in Mischreibung. Ph.D. Thesis, University of Kaiserslautern-Landau, Landau in der Pfalz, Germany, 2023. [Google Scholar]
- Kriese, M.; Wittek, E.; Gattermann, S.; Tischmacher, H.; Poll, G.; Ponick, B. Influence of bearing currents on the bearing lifetime for converter driven machines. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 1735–1739. [Google Scholar] [CrossRef]
- Boyanton, H.E.; Hodges, G. Bearing fluting [motors]. IEEE Ind. Appl. Mag. 2002, 8, 53–57. [Google Scholar] [CrossRef]
- Bechev, D. Prüfmethodik zur Charakterisierung der Elektrischen Eigenschaften von Wälzlagerschmierstoffen. Ph.D. Thesis, Technische Universität Kaiserslautern, Kaiserslautern, Germany, 2020. [Google Scholar]
- Gonda, A.; Capan, R.; Bechev, D.; Sauer, B. The Influence of Lubricant Conductivity on Bearing Currents in the Case of Rolling Bearing Greases. Lubricants 2019, 7, 108. [Google Scholar] [CrossRef]
- Graf, S.; Capan, R.; Koch, O. Wechselwirkung von Tribologie und Elektrisch Induzierter Oberflächenmutation in Wälzlagern. In Proceedings of the 5th VDI-Fachkonferenz—Schadensmechanismen an Lagern, Aachen, Germany, 28–29 June 2022. [Google Scholar]
- Biswas, S.; Bose, S.C.; Bhave, S.K.; Pramila Bai, B.N.; Biswas, S.K. Study of corrugations in motor bearings. Tribol. Int. 1992, 25, 27–36. [Google Scholar] [CrossRef]
- Tsypkin, M. Induction motor condition monitoring: Vibration analysis technique—A practical implementation. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 406–411. [Google Scholar] [CrossRef]
- Zuercher, M.; Heinzler, V.; Schlücker, E.; Esmaeili, K.; Harvey, T.J.; Holweger, W.; Wang, L. Early failure detection for bearings in electrical environments. Int. J. Cond. Monit. 2018, 8, 24–29. [Google Scholar] [CrossRef]
- Hemati, A. A Case Study: Fluting Failure Analysis by Using Vibrations Analysis. J Fail. Anal. Preven. 2018, 19, 917–921. [Google Scholar] [CrossRef]
- Kudelina, K.; Asad, B.; Vaimann, T.; Belahcen, A.; Rassõlkin, A.; Kallaste, A.; Lukichev, D.V. Bearing Fault Analysis of BLDC Motor for Electric Scooter Application. Designs 2020, 4, 42. [Google Scholar] [CrossRef]
- Romanenko, A.; Mütze, A.; Ahola, J. Incipient Bearing Damage Monitoring of 940-h Variable Speed Drive System Operation. IEEE Trans. Energy Convers. 2017, 32, 99–110. [Google Scholar] [CrossRef]
- Ma, J.; Xue, Y.; Han, Q.; Li, X.; Yu, C. Motor Bearing Damage Induced by Bearing Current: A Review. Machines 2022, 10, 1167. [Google Scholar] [CrossRef]
- Didenko, T.; Pridemore, W.D. Electrical Fluting Failure of a Tri-Lobe Roller Bearing. J Fail. Anal. Preven. 2012, 12, 575–580. [Google Scholar] [CrossRef]
- He, F.; Xie, G.; Luo, J. Electrical bearing failures in electric vehicles. Friction 2020, 8, 4–28. [Google Scholar] [CrossRef]
- Becker, A.; Abanteriba, S. Electric discharge damage in aircraft propulsion bearings. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2014, 228, 104–113. [Google Scholar] [CrossRef]
- Ost, W.; De Baets, P. Failure analysis of the deep groove ball bearings of an electric motor. Eng. Fail. Anal. 2005, 12, 772–783. [Google Scholar] [CrossRef]
- Ghosh, B.; Cao, J.; Zhu, J. A Study on Heatsink Cooling Fan Lifetime Evaluation. In Proceedings of the 2023 Annual Reliability and Maintainability Symposium (RAMS), Orlando, FL, USA, 23–26 January 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Graf, S.; Koch, O.; Sauer, B. Influence of Parasitic Electric Currents on an Exemplary Mineral-Oil-Based Lubricant and the Raceway Surfaces of Thrust Bearings. Lubricants 2023, 11, 313. [Google Scholar] [CrossRef]
- Hamrock, J.B.; Dowson, D. Isothermal elastohydrodynamic lubrication of point contacts III: Fully Flooded Results. J. Lubr. Technol. 1977, 99, 264–275. [Google Scholar] [CrossRef]
- Gonda, A.; Paulus, S.; Graf, S.; Koch, O.; Götz, S.; Sauer, B. Basic experimental and numerical investigations to improve the modeling of the electrical capacitance of rolling bearings. Tribol. Int. 2024, 193, 109354. [Google Scholar] [CrossRef]
- Abbott, E.; Firestone, F. Specifying Surface Quality—A Method Based on Accurate Measurement and Comparison. Mech. Eng. 1933, 55, 569–572. [Google Scholar]
- DIN-EN-ISO-25178-2; Geometrische Produktspezifikation (GPS)—Oberflächenbeschaffenheit: Flächenhaft—Teil 2: Begriffe und Oberflächen-Kenngrößen. Deutsches Institut für Normung (DIN): Berlin, Germany, 2012.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation | Force/N | Rotation Speed/rpm | Temperature/°C | Common-Mode-Voltage/Vpp | Switching Frequency/kHz |
|---|---|---|---|---|---|
| A-m1 | 4000 | 1000 | 40 | - | - |
| A-m2 | 80 | ||||
| A-e1 | 4000 | 1000 | 40 | 60 | 20 |
| A-e2 | 40 | 40 | |||
| A-e3 * | 40 | 20 | |||
| A-e4 | 80 | 60 | |||
| B-m1 | 6000 | 1000 | 40 | - | - |
| B-e1 | 6000 | 1000 | 40 | 60 | 20 |
| B-e2 | 40 | 5 | |||
| B-e3 | 80 | 20 | |||
| C-m1 | 8000 | 1000 | 40 | - | - |
| C-e1 | 8000 | 1000 | 40 | 60 | 20 |
| Parameter | Unit | Test Series A | Test Series B | Test Series C |
|---|---|---|---|---|
| Contact force | N | 4000 | 6000 | 8000 |
| C0/P | - | 19 | 13 | 10 |
| Hertzian pressure | MPa | 1494 | 1710 | 1883 |
| Single contact area | mm2 | 0.27 | 0.35 | 0.43 |
| Lubrication gap height * | µm | 0.79 @40 °C | 0.76 @40 °C | 0.72 @40 °C |
| 0.22 @80 °C | 0.21 @80 °C | - | ||
| Specific lubrication gap | - | 1.23 @40 °C | 1.19 @40 °C | 1.13 @40 °C |
| 0.34 @80 °C | 0.33 @80 °C | - |
| Designation | Light Load Hardness @Standing Ring (in HV 1) Mean (Single Measurement) | Light Load Hardness @Rotating Ring (in HV 1) Mean (Single Measurement) |
|---|---|---|
| A-m1 | 796.6 (765/851/851/726/790) | 780.4 (749/689/842/833/789) |
| A-m2 | 713.8 (734/698/698/734/705) | 718.4 (705/691/720/749/727) |
| A-e1 | 739.2 (749/749/734/691/773) | 762.4 (749/734/815/765/749) |
| A-e1 in fluting area | 681.2 (665/678/652/720/691) | |
| A-e2 | 746.2 (773/698/798/705/757) | 709.6 (698/698/720/712/720) |
| A-e3-a | 748.0 (749/749/727/781/734) | 747.2 (773/781/742/742/698) |
| A-e3-b | 790.2 (757/815/757/815/807) | 775.4 (798/727/781/773/798) |
| A-e4 | 740.2 (688/765/757/749/742) | 759.0 (742/749/798/749/757) |
| B-m1 | 806.8 (798/798/781/824/833) | 808.4 (815/781/815/798/833) |
| B-e1 | 790.2 (824/757/757/815/798) | 790.0 (842/798/705/798/807) |
| B-e2 | 790.8 (765/861/773/790/765) | 795.0 (815/790/807/773/790) |
| B-e3 | 793.2 (781/773/790/807/815) | 781.6 (781/773/790/757/807) |
| C-m1 | - | 840.0 (880/773/852/815/880) |
| C-e1 | 777.0 (734/781/815/790/765) | 783.2 (765/790/781/773/807) |
| Designation | Mass after Run-In/g (Figure 1—6a/6b/6c) | Mass after Load Phase/g (Figure 1—6a/6b/6c) | Delta/g (Figure 1—6a/6b/6c) |
|---|---|---|---|
| A-m1 | 89.413/76.958/83.486 | 89.411/76.937/83.486 | −0.002/−0.021/0.001 |
| A-m2 | - | - | - |
| A-e1 | 88.846/76.935/83.817 | 88.847/76.905/83.818 | 0.001/−0.030/0.001 |
| A-e2 | 89,221/76,828/83,453 | 89,219/76,760/83,455 | −0.002/−0.068/0.002 |
| A-e3-a | - | - | - |
| A-e3-b | 89,317/76,525/83,718 | 89,317/76,477/83,719 | 0.001/−0.047/0.001 |
| A-e4 | - | - | - |
| B-m1 | 88,751/76,331/83,350 | 88,750/76,328/83,351 | −0.001/−0.003/0.001 |
| B-e1 | - | - | - |
| B-e2 | 89,512/76,924/83,814 | 89,510/76,872/83,810 | −0.002/−0.052/−0.004 |
| B-e3 | 89,938/76,804/83,502 | 89,934/76,810/83,495 | −0.004/0.007/−0.006 |
| C-m1 | 89,380/76,408/83,614 | 89,380/76,380/83,619 | −0.001/−0.028/0.005 |
| C-e1 | 88,916/77,009/83,429 | 88,916/76,971/83,431 | 0.000/−0.038/0.002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Graf, S.; Koch, O. Changes in Surface Topography and Light Load Hardness in Thrust Bearings as a Reason of Tribo-Electric Loads. Lubricants 2024, 12, 303. https://doi.org/10.3390/lubricants12090303
Graf S, Koch O. Changes in Surface Topography and Light Load Hardness in Thrust Bearings as a Reason of Tribo-Electric Loads. Lubricants. 2024; 12(9):303. https://doi.org/10.3390/lubricants12090303
Chicago/Turabian StyleGraf, Simon, and Oliver Koch. 2024. "Changes in Surface Topography and Light Load Hardness in Thrust Bearings as a Reason of Tribo-Electric Loads" Lubricants 12, no. 9: 303. https://doi.org/10.3390/lubricants12090303
APA StyleGraf, S., & Koch, O. (2024). Changes in Surface Topography and Light Load Hardness in Thrust Bearings as a Reason of Tribo-Electric Loads. Lubricants, 12(9), 303. https://doi.org/10.3390/lubricants12090303