
Serious Damage Localization of Continuous Girder Bridge by Support Reaction Influence Lines



Abstract
:1. Introduction
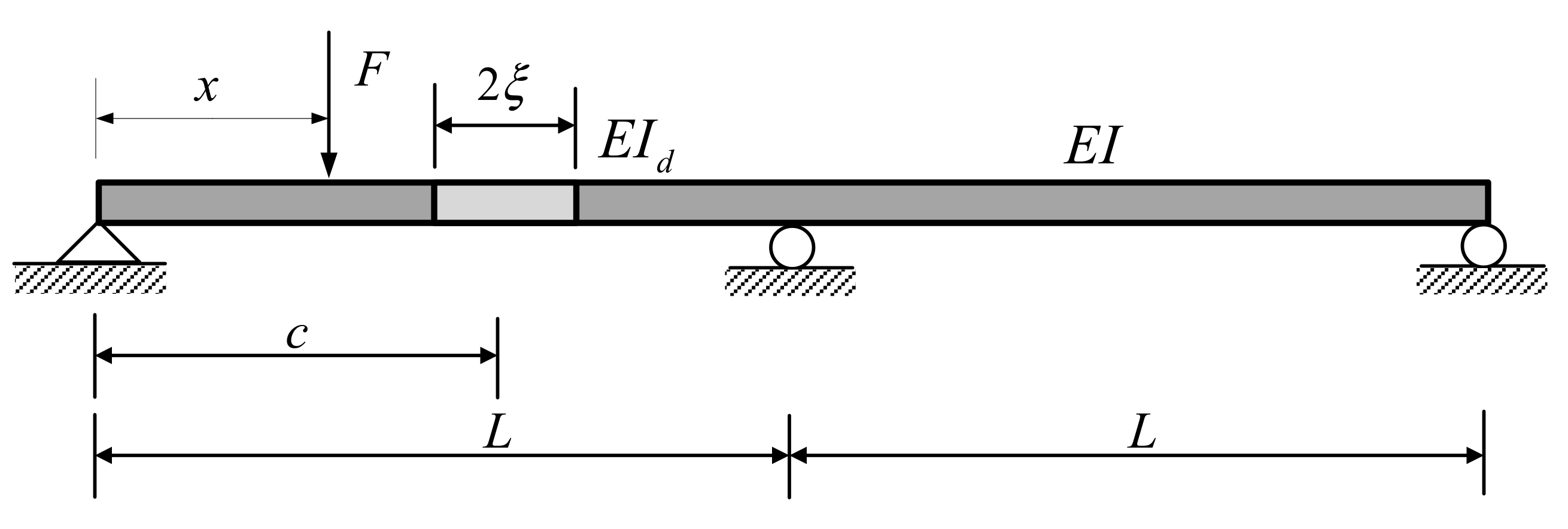
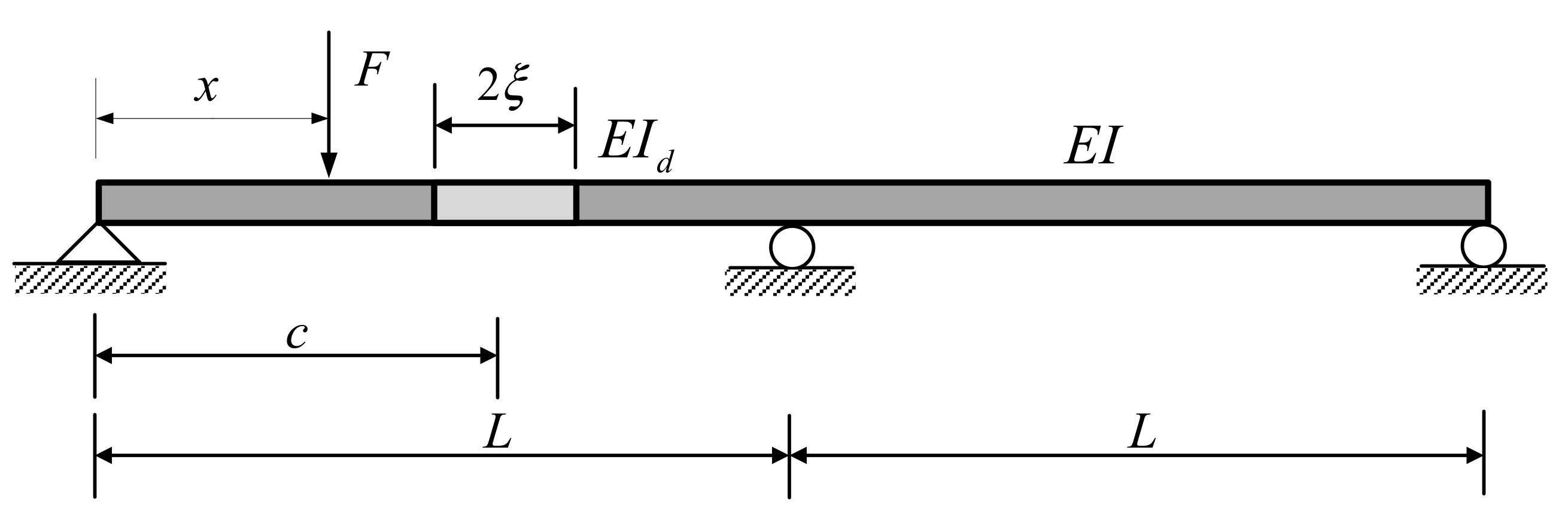
2. Support Reaction IL—Based Damage Index
3. Damage Localization Based on Measured Support Reaction ILs
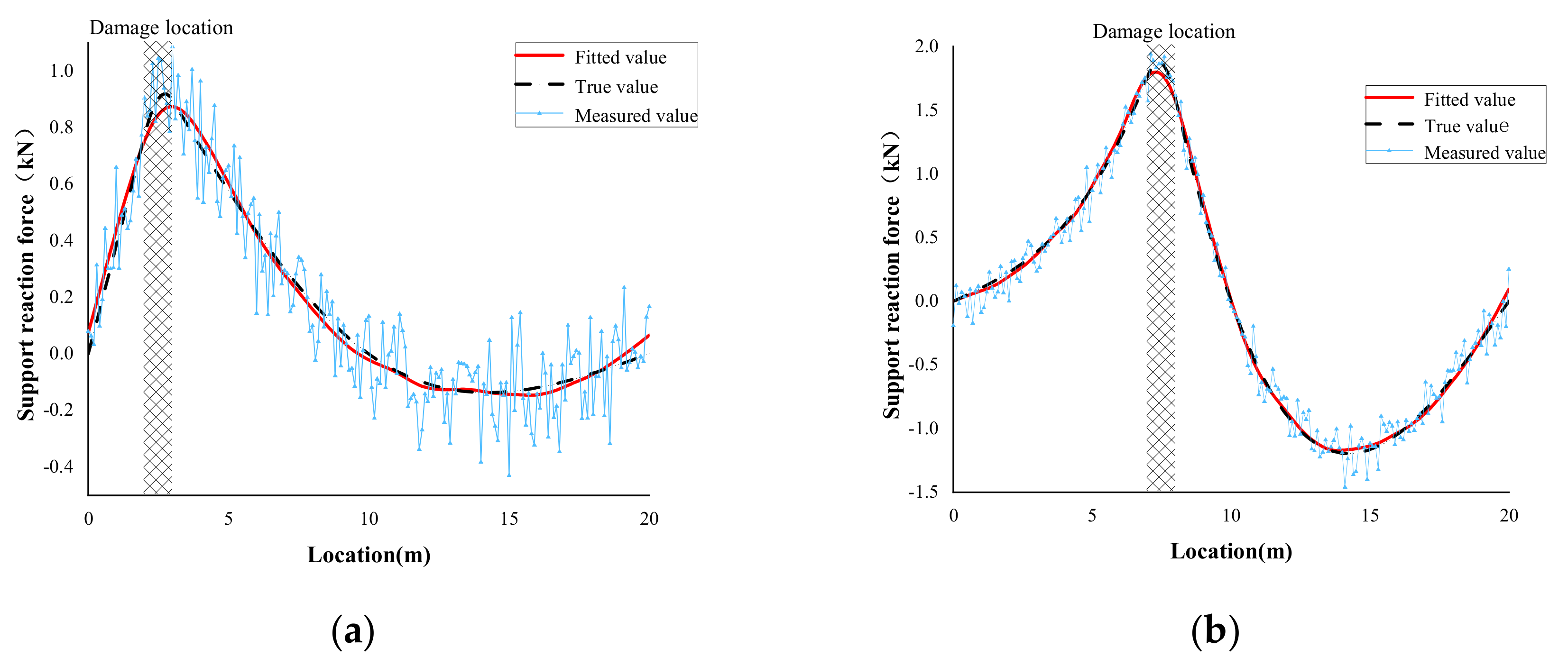
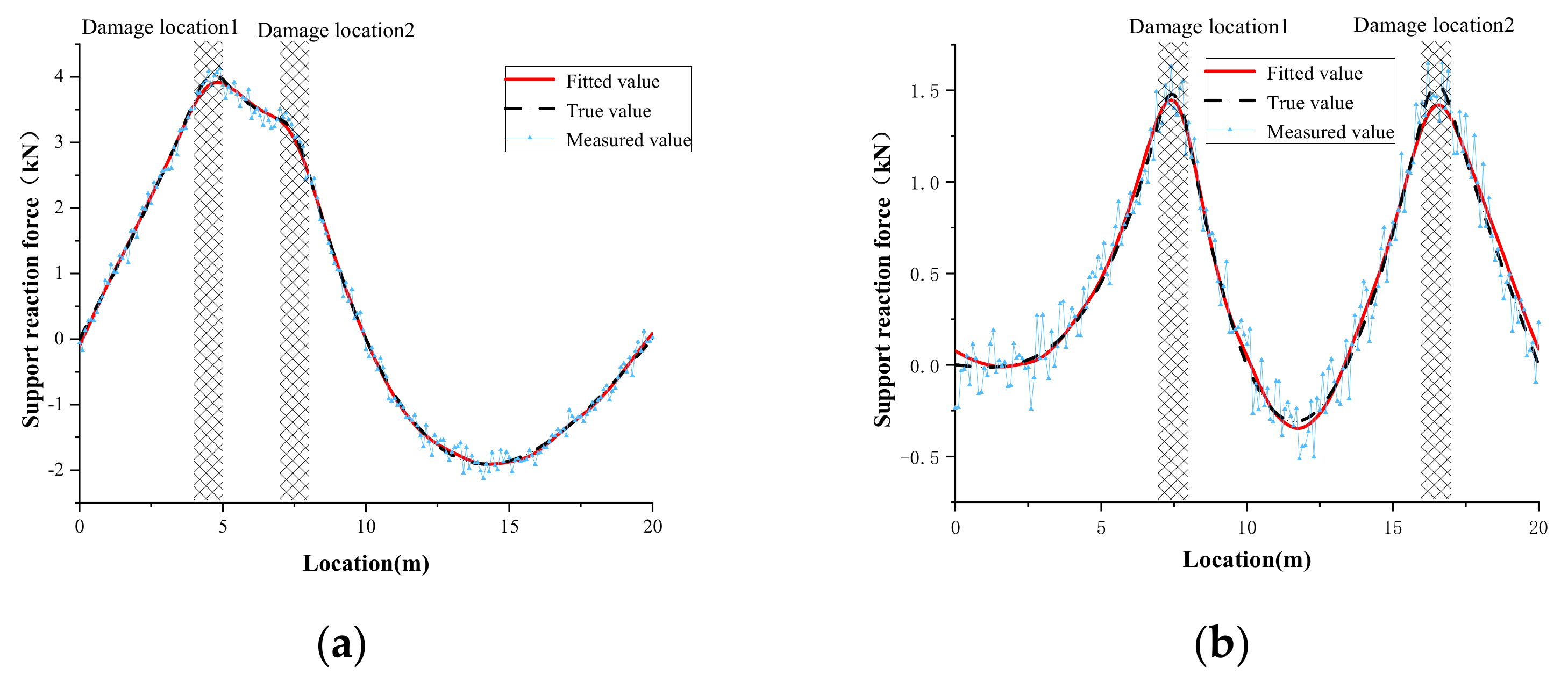
3.1. Curve Fitting of the Support Reaction ILs Change Based on Cubic Spline Function
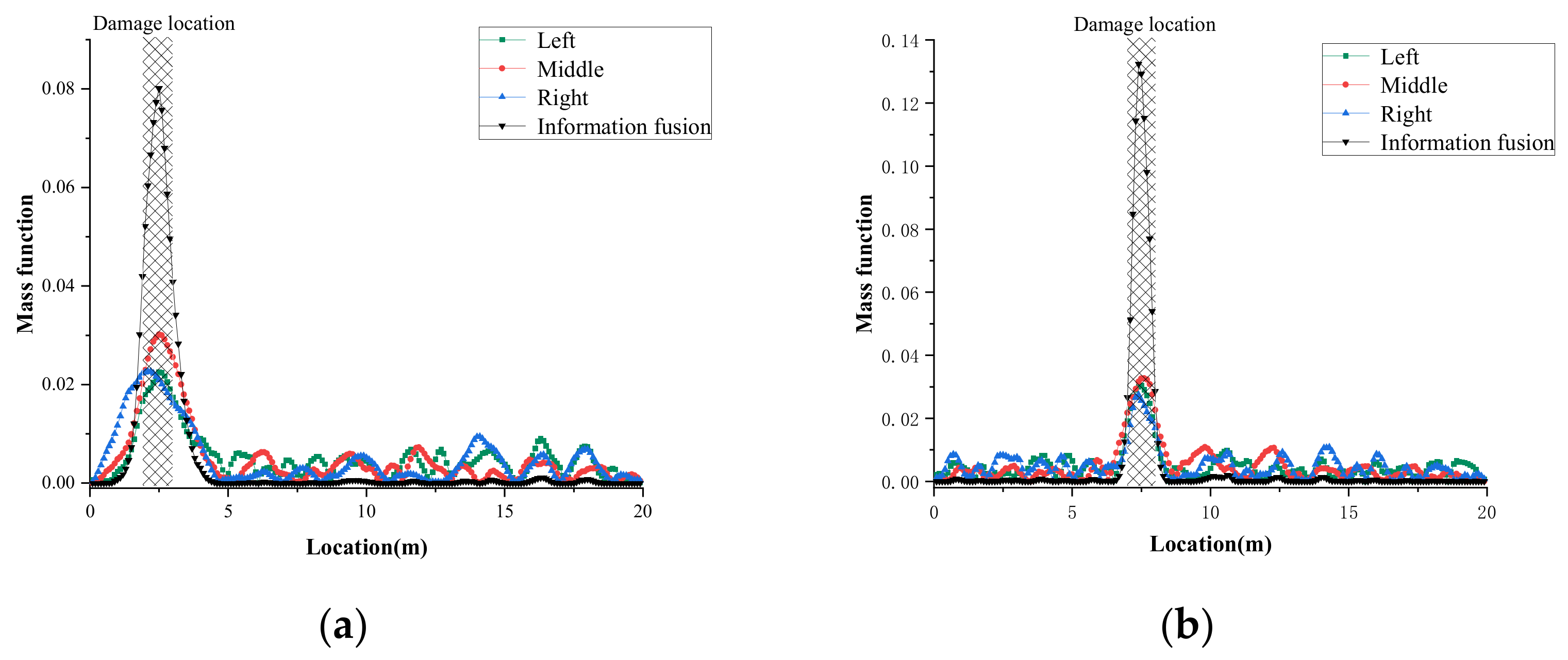
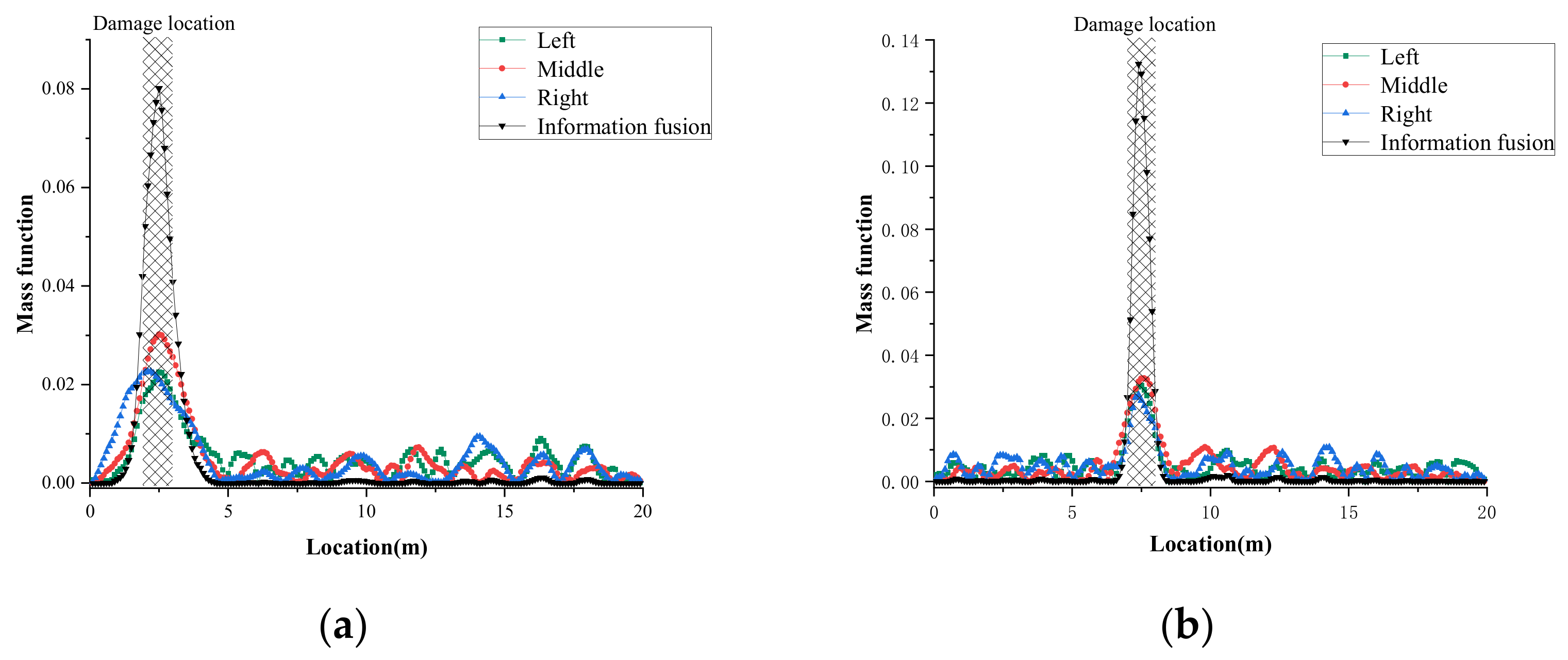
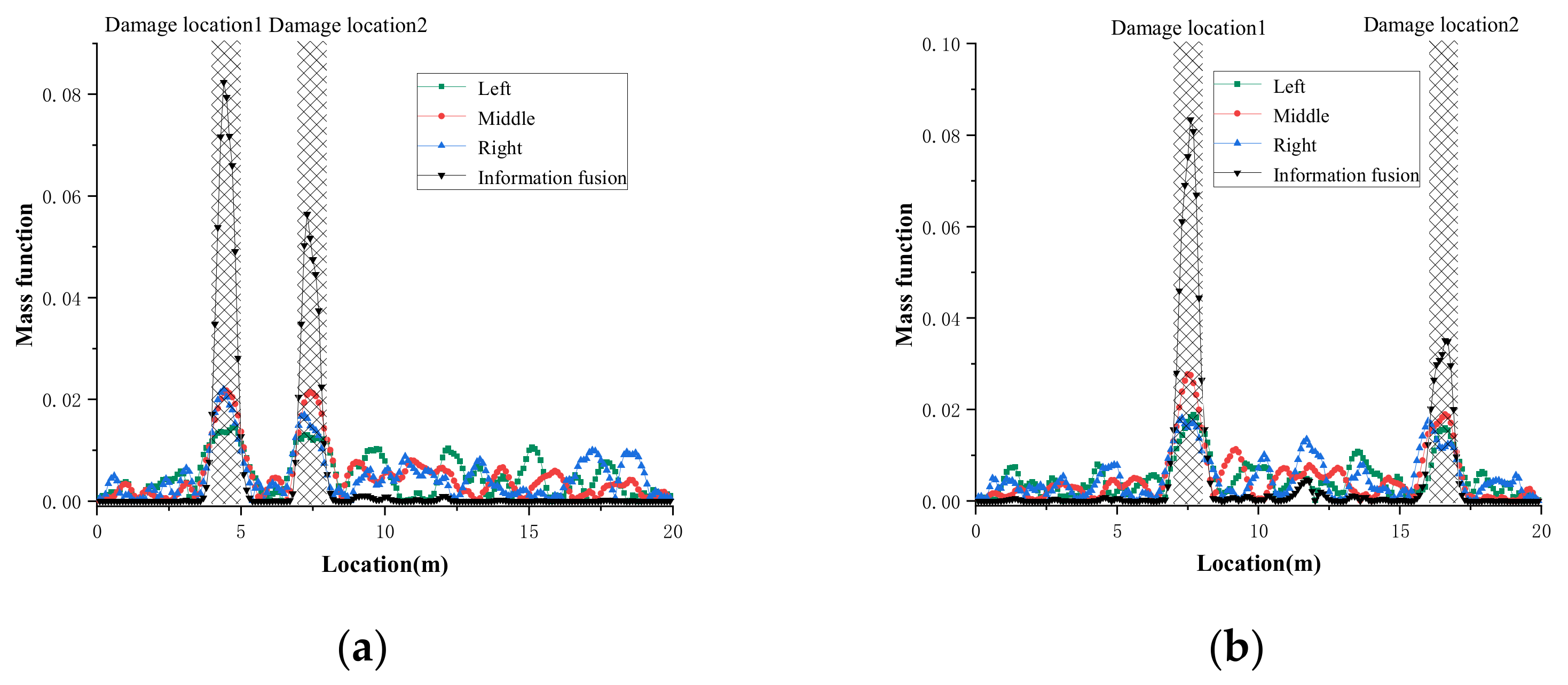
3.2. Damage Localization Based on Information Fusion of Multiple ILs
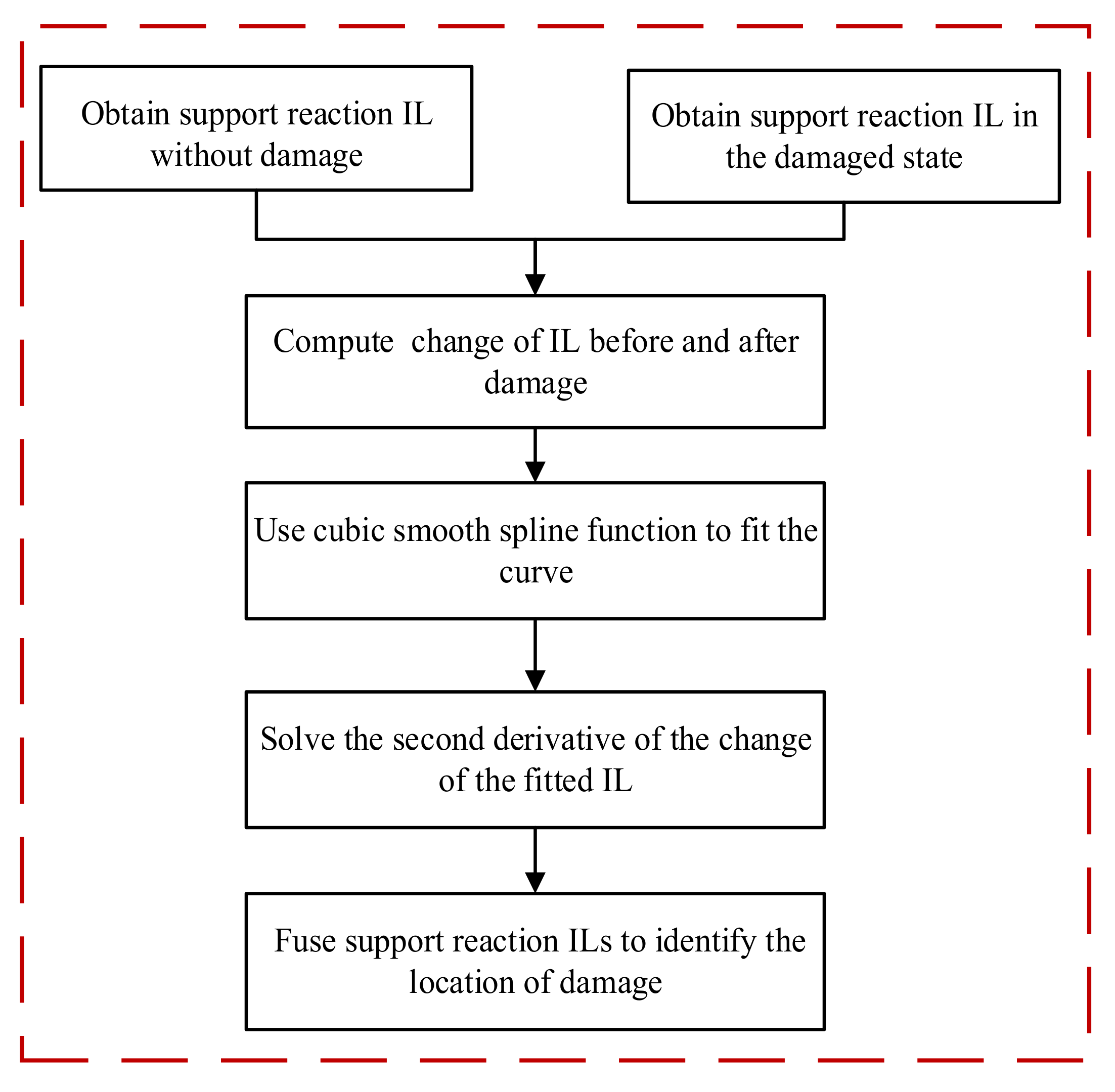
3.3. Main Steps of Damage Localization Approach
- Step 1: Use the measured data to compute the change of the IL of the support reaction before and after the damage;
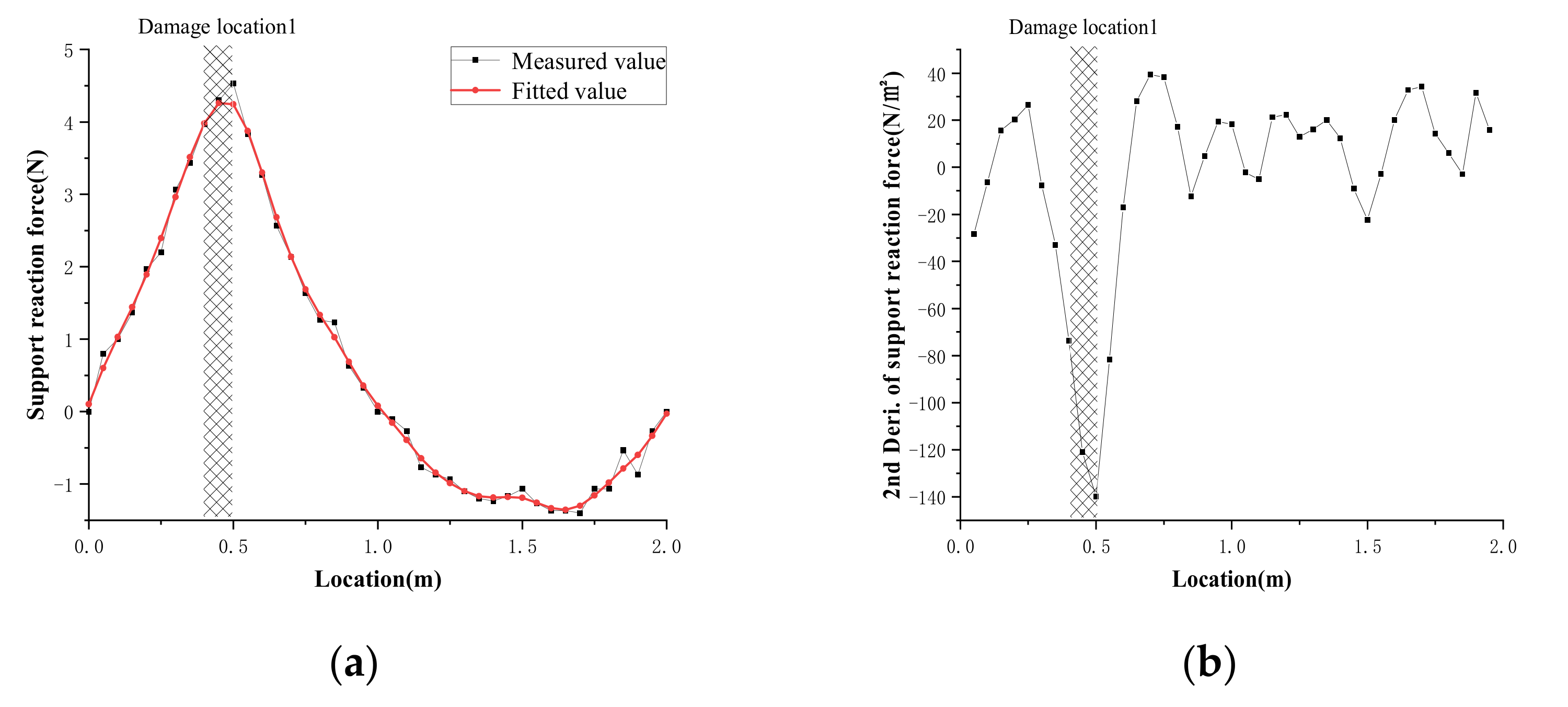
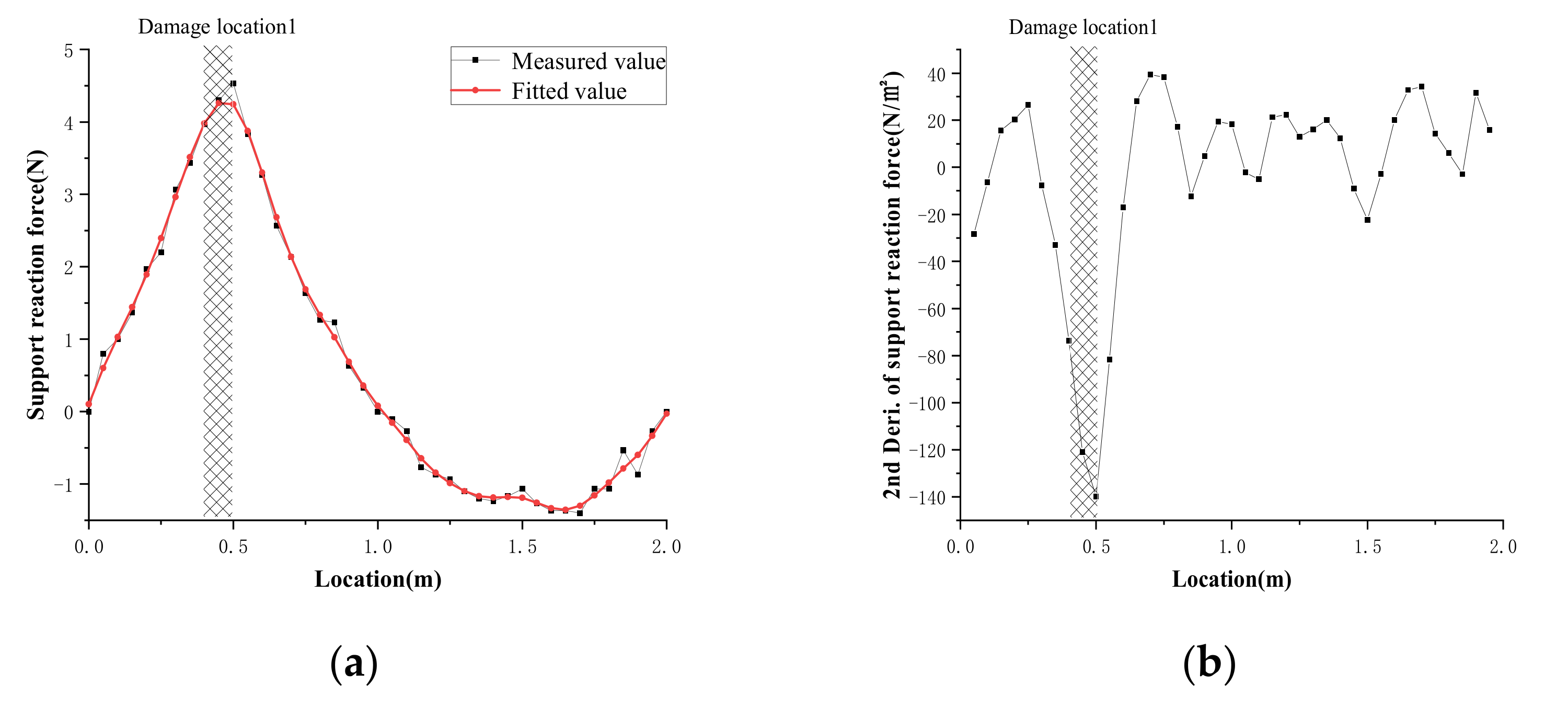
- Step 2: Use the cubic smoothing spline function to solve the fitted curve of the change in the support reaction IL;
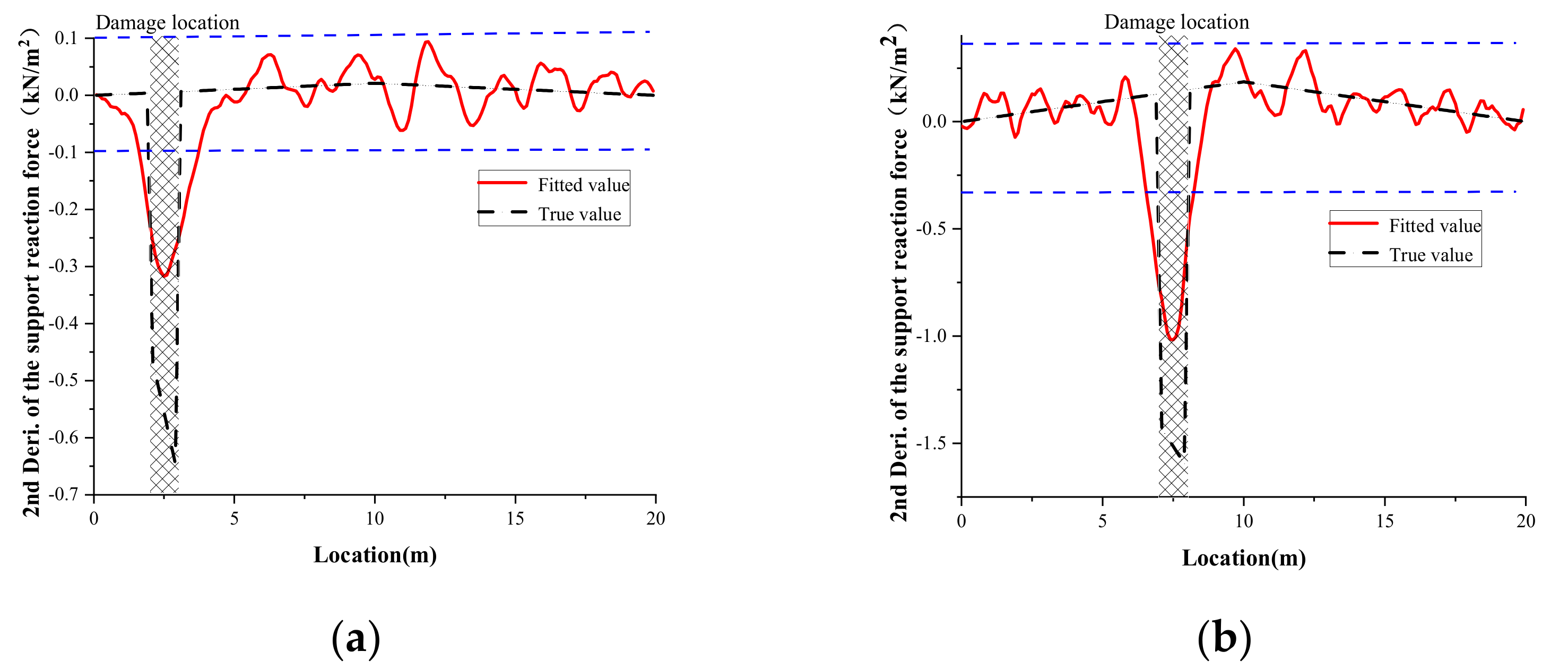
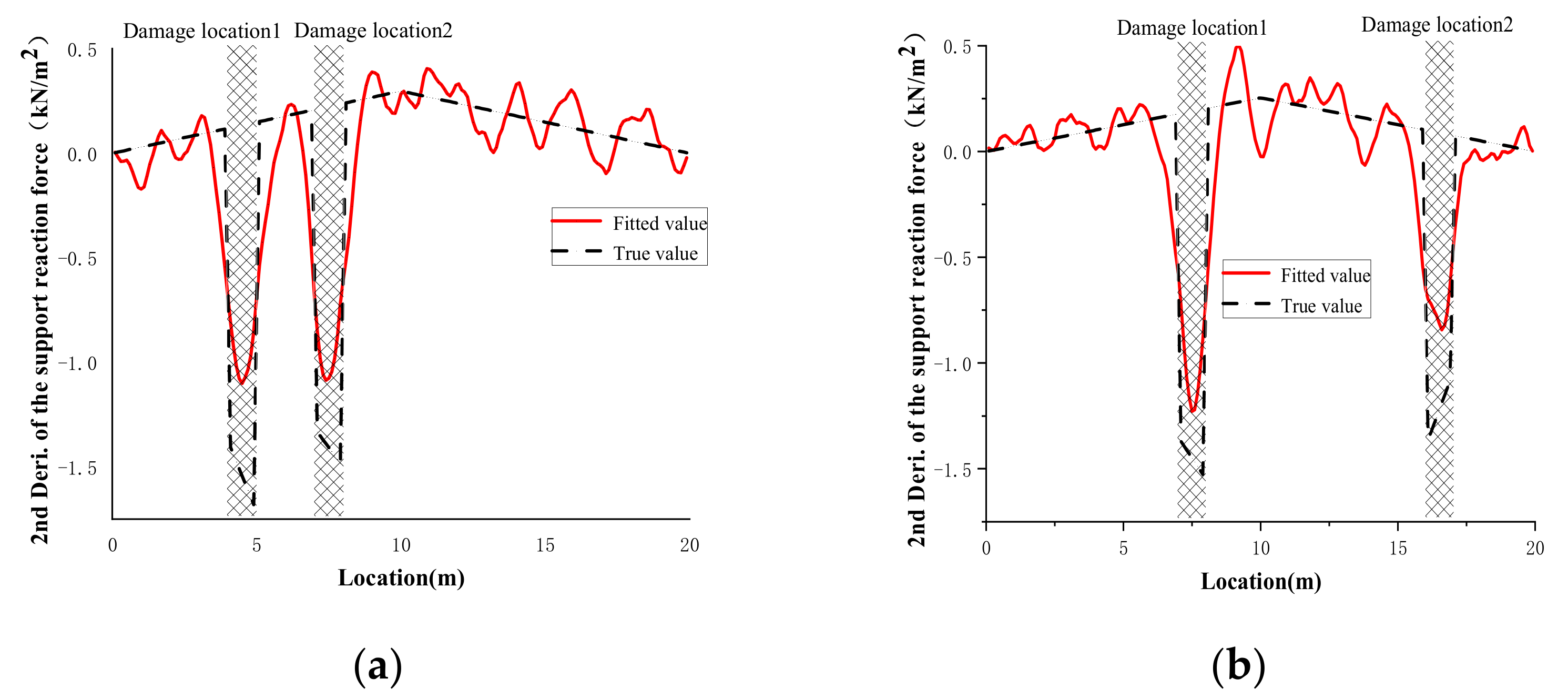
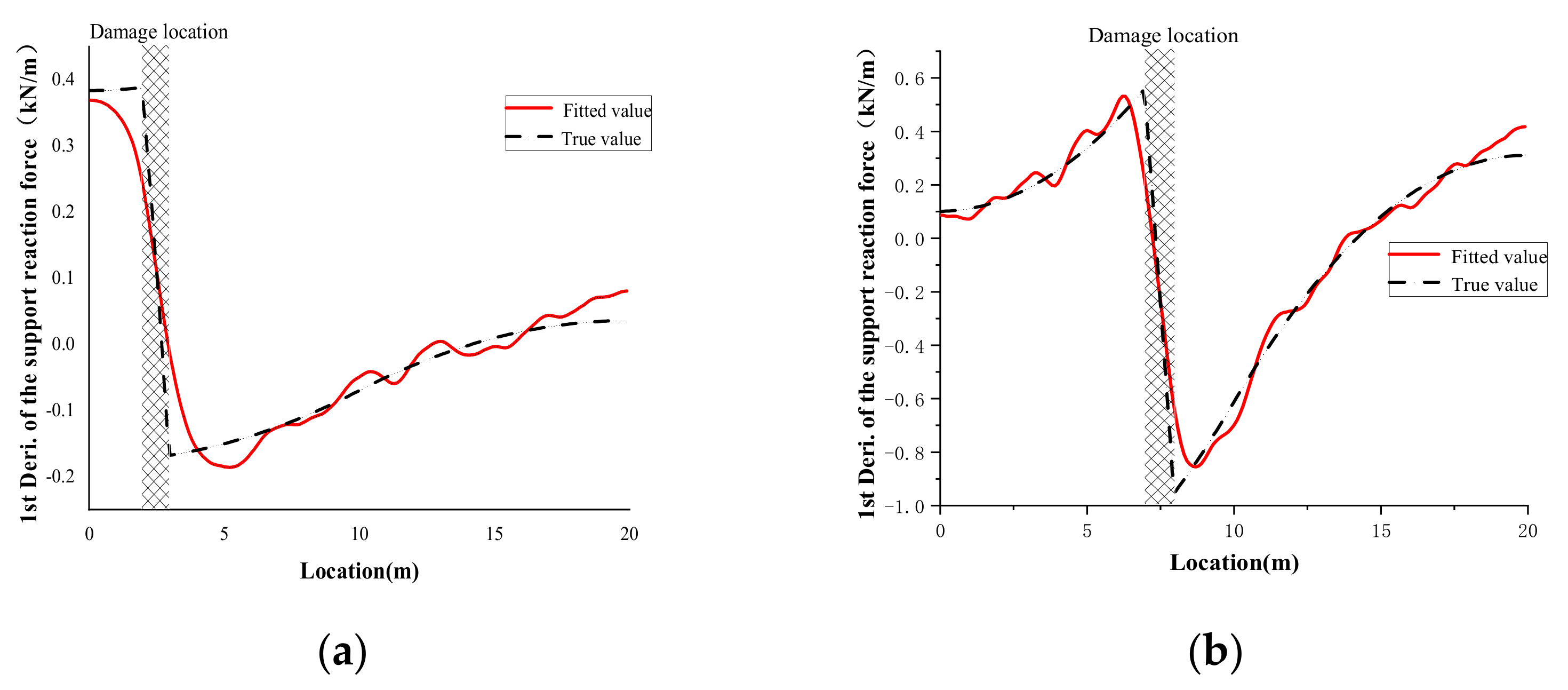
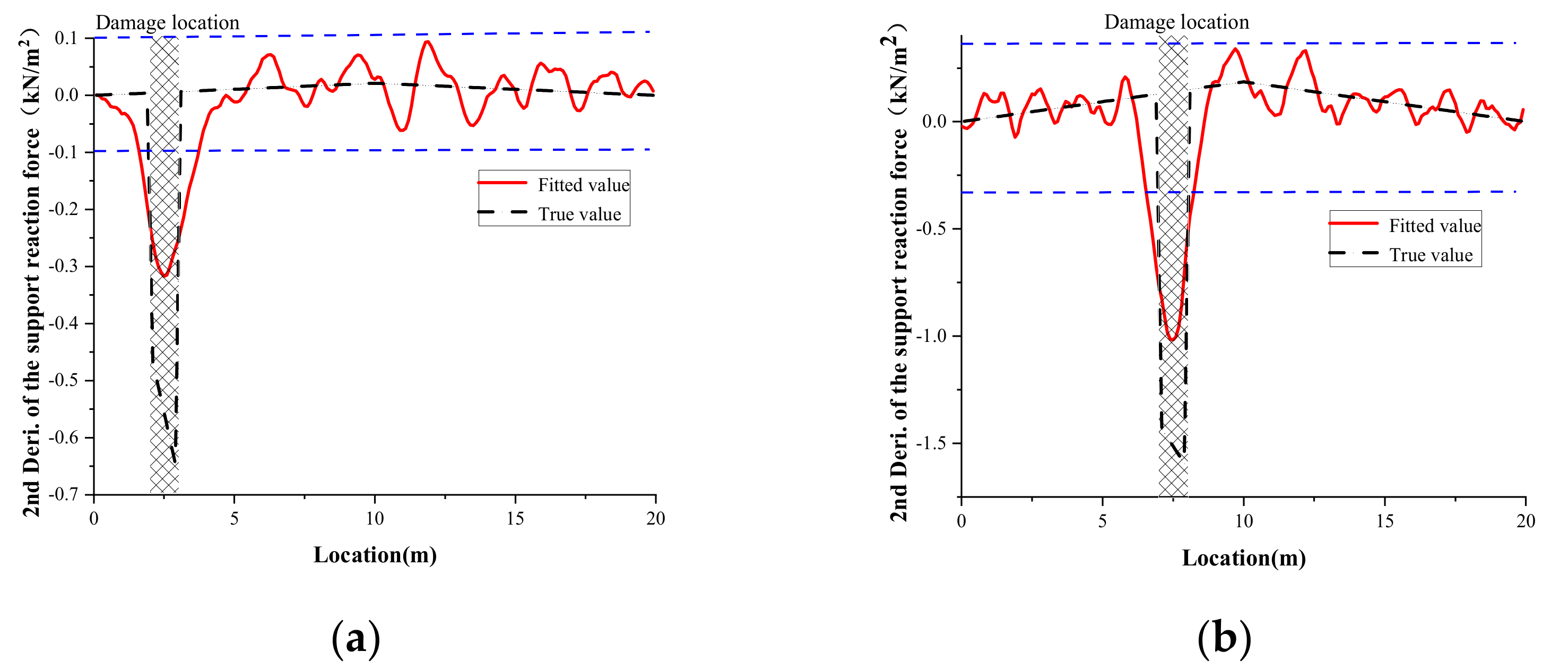
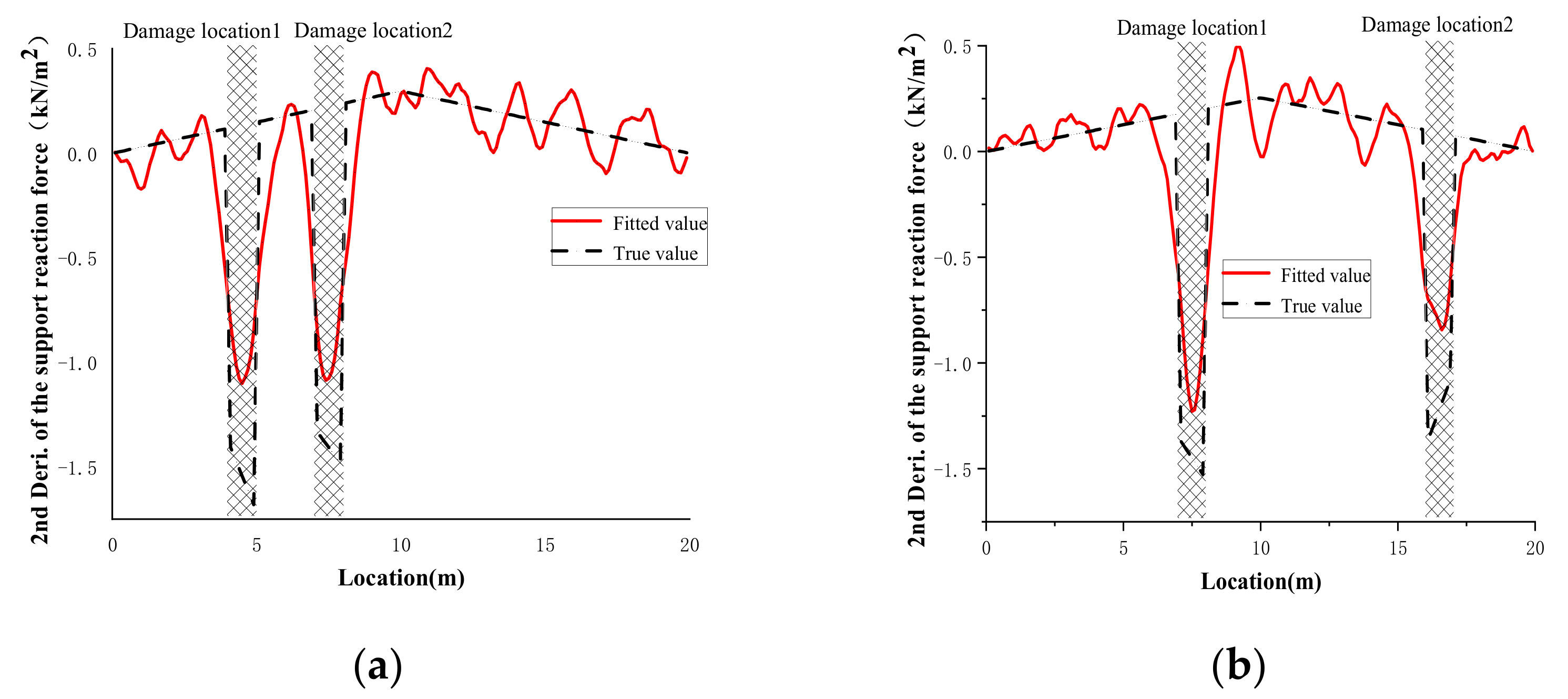
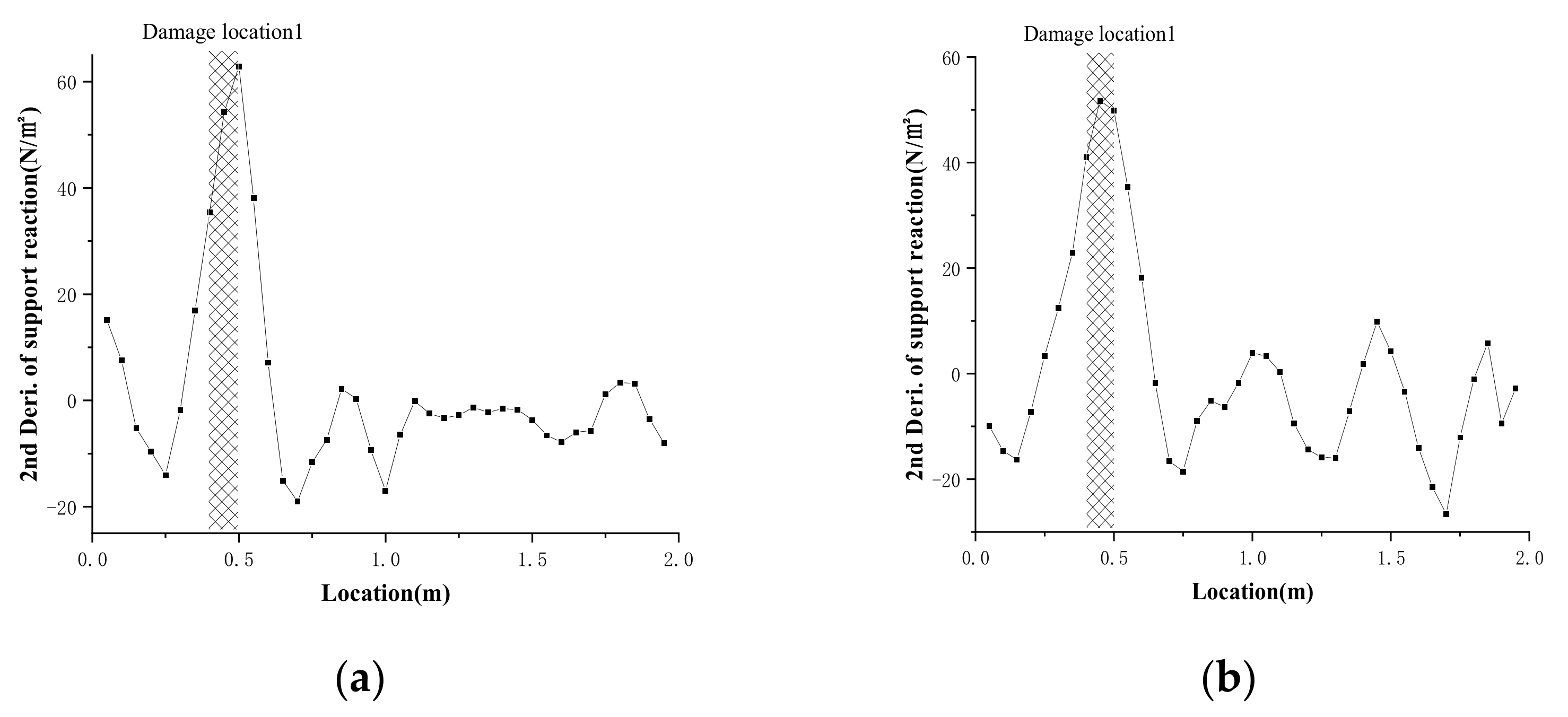
- Step 3: Use the central difference method to solve the second derivative of the fitted curve of the change in the support reaction IL;
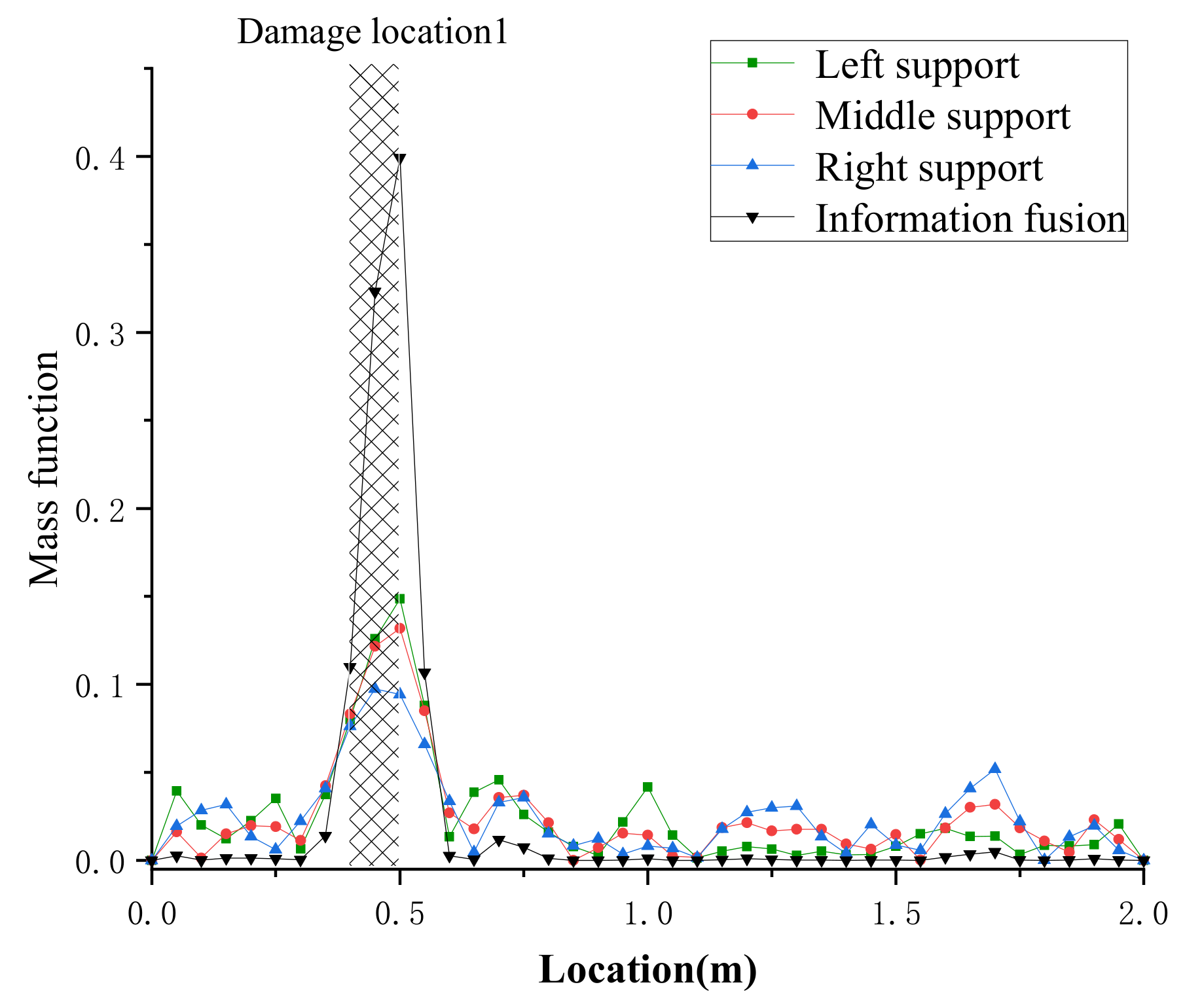
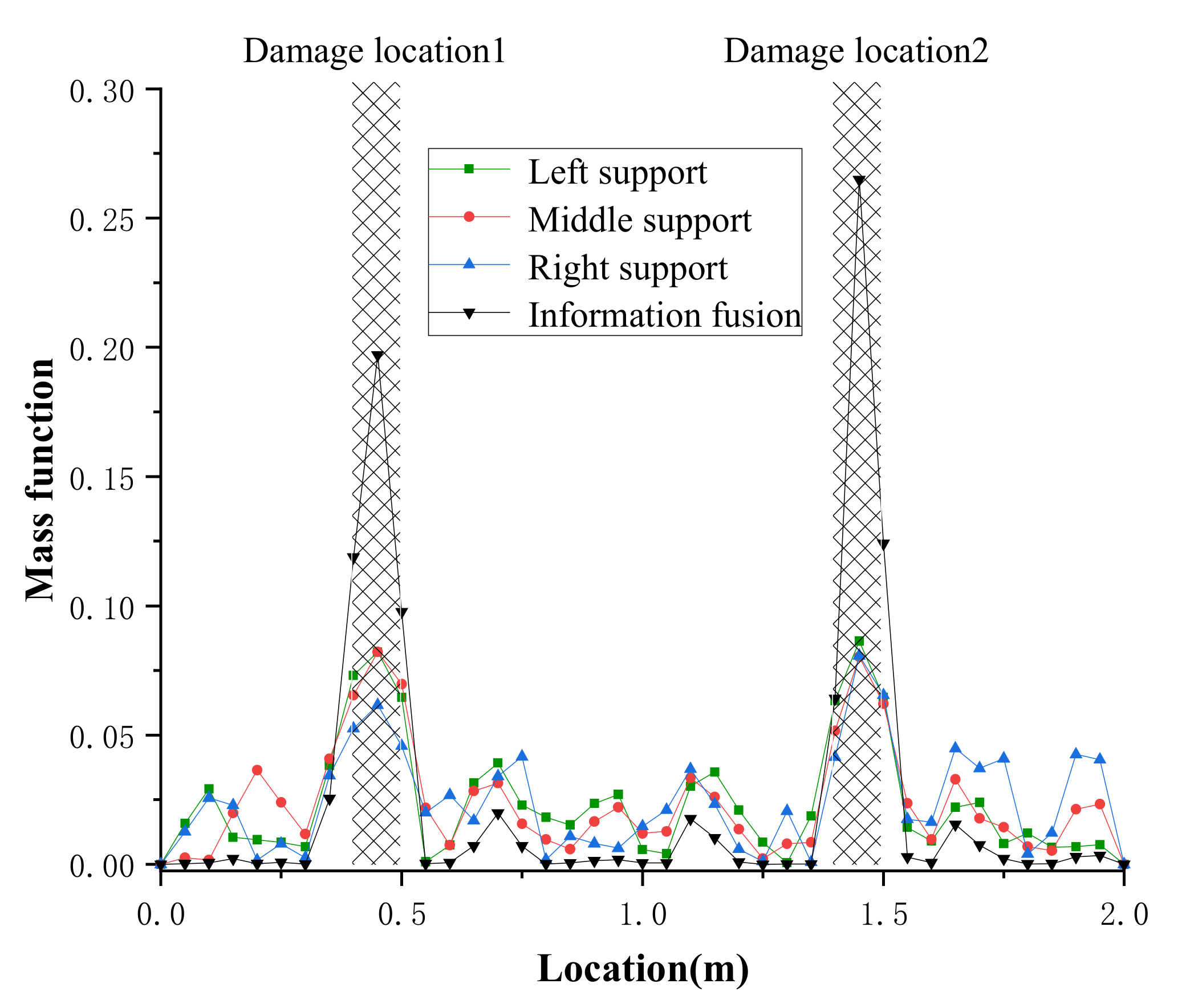
- Step 4: Use Equation (18) to combine data from multiple sensors to provide a comprehensive index of the likelihood of each detection region.
4. Verification of the Proposed Damage Localization Method
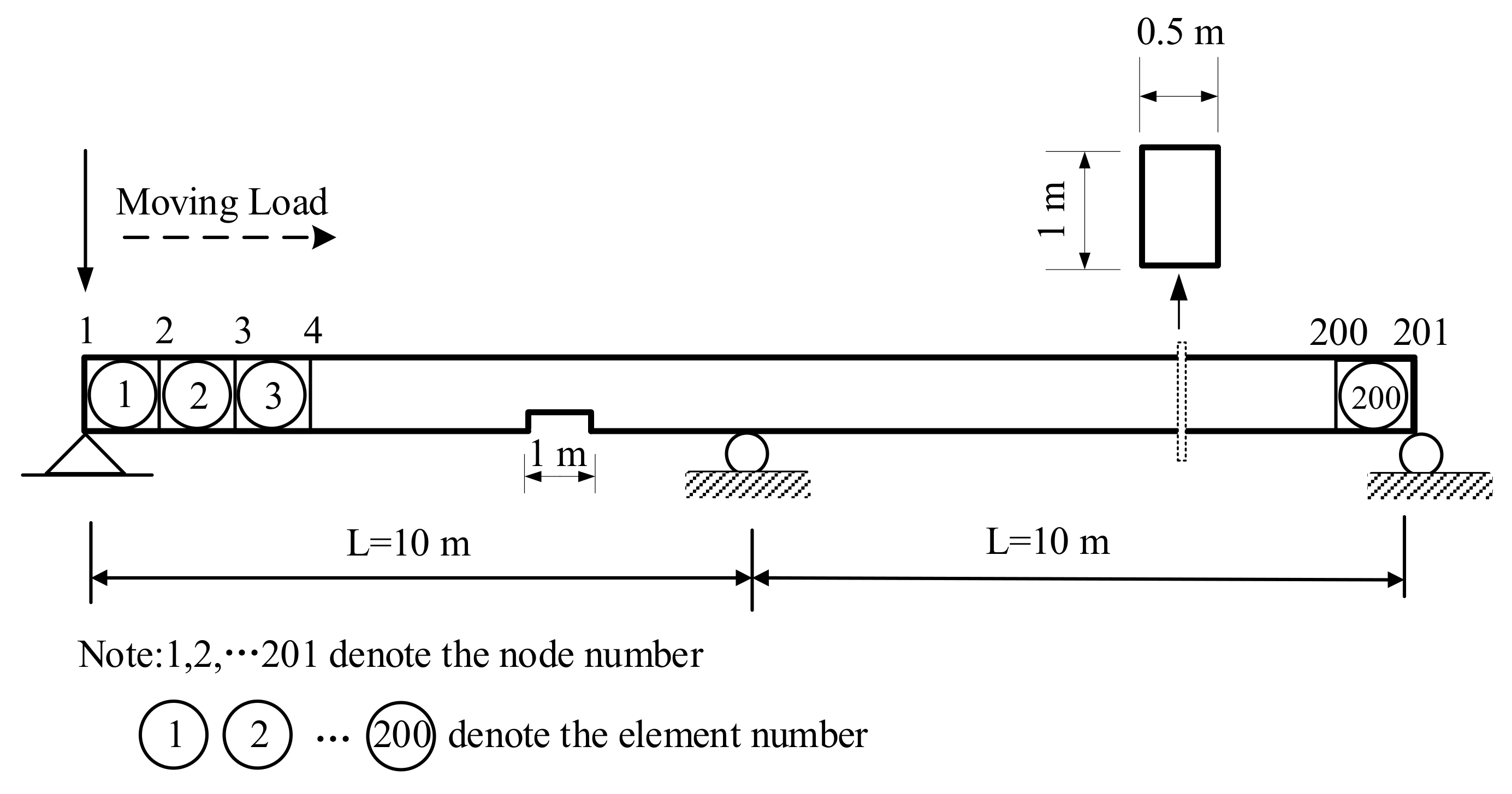
4.1. Case Study 1: Numerical Simulation of a Two-Span Continuous Beam
4.1.1. Model Introduction
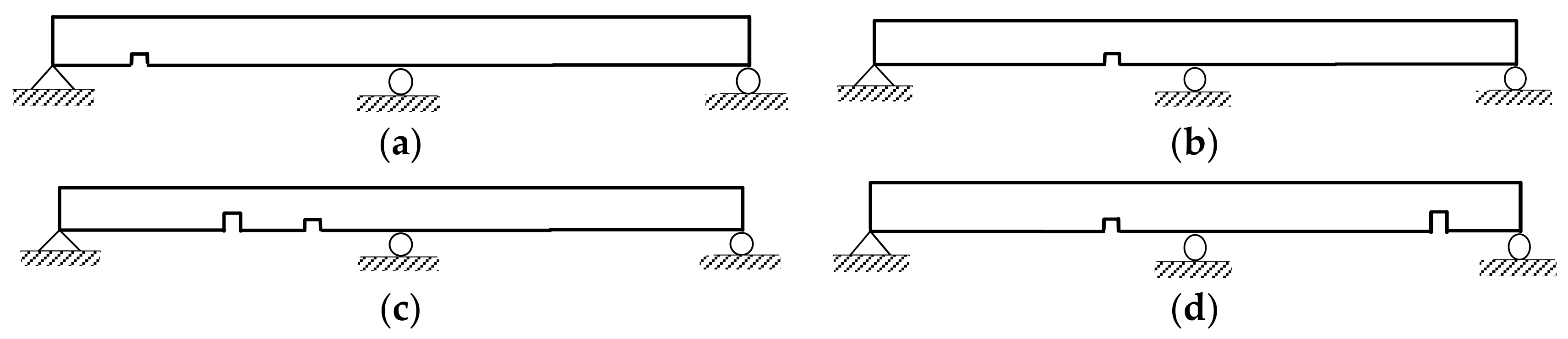
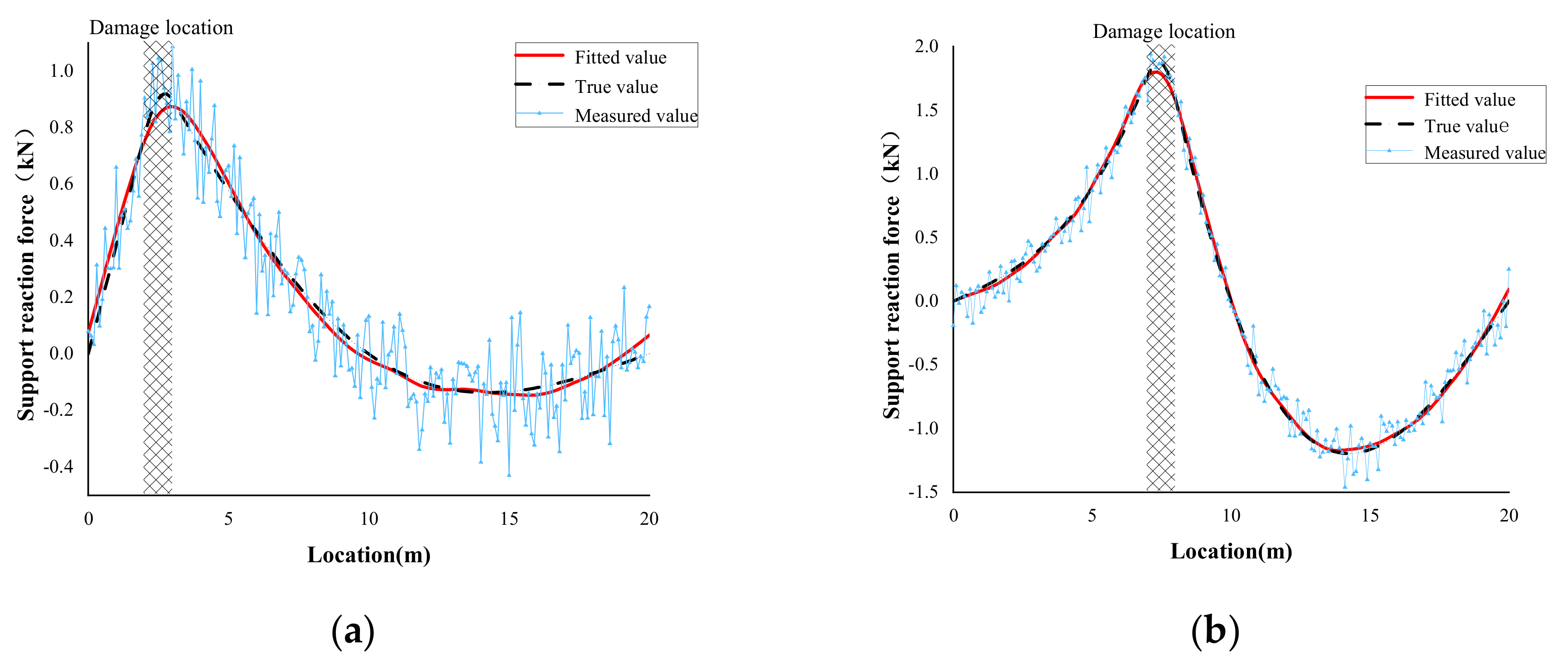
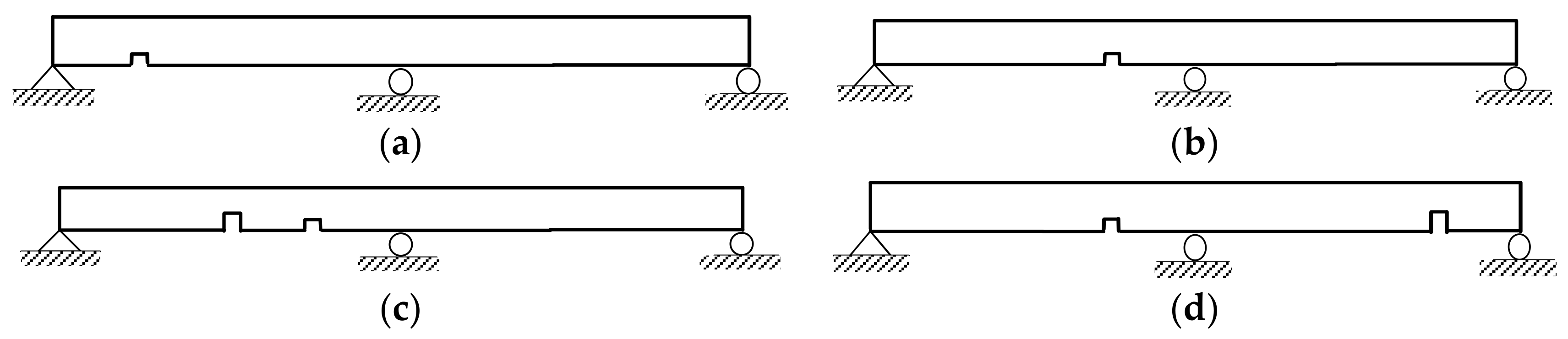
4.1.2. Single Damage Case
4.1.3. Double Damage Case
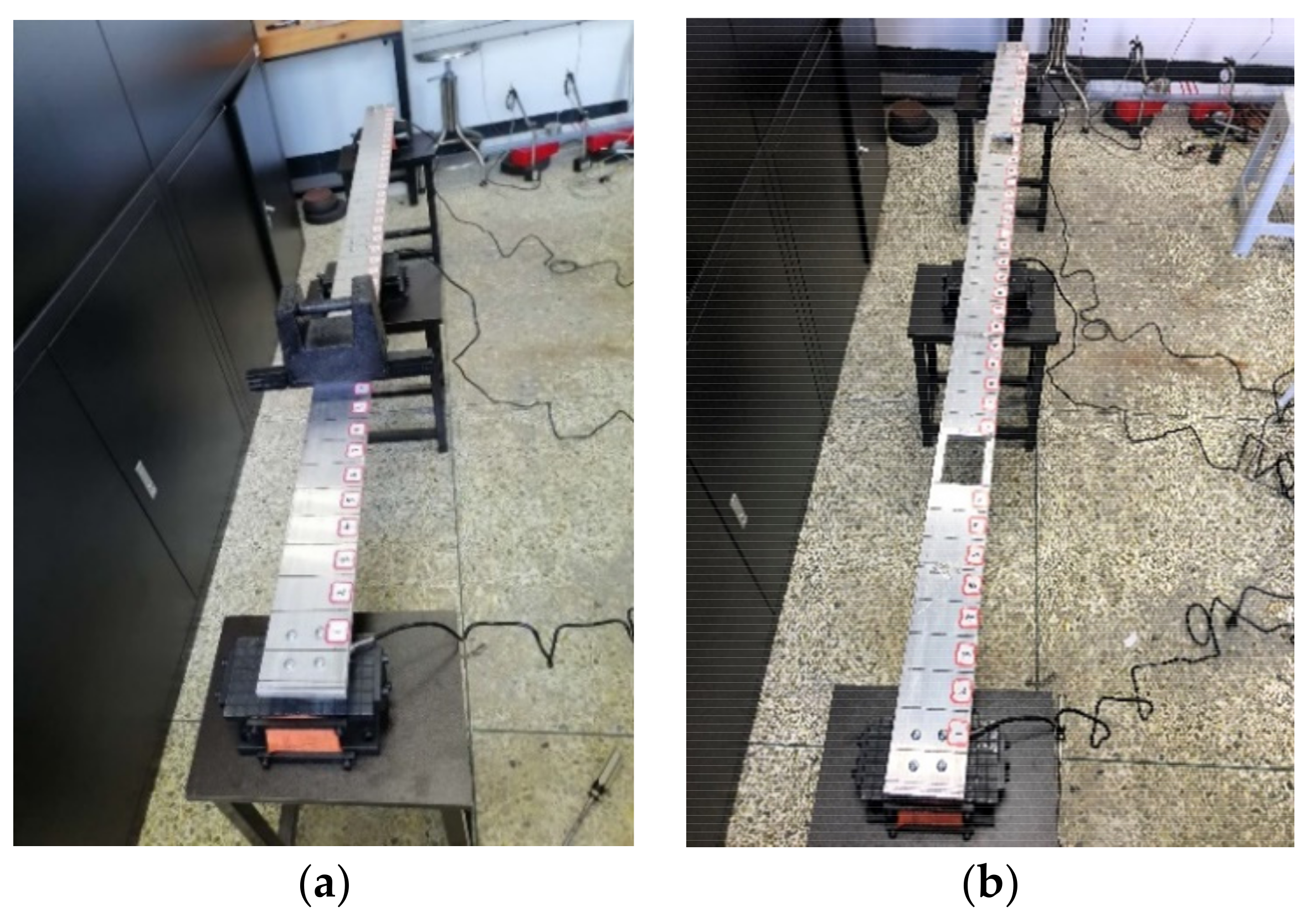
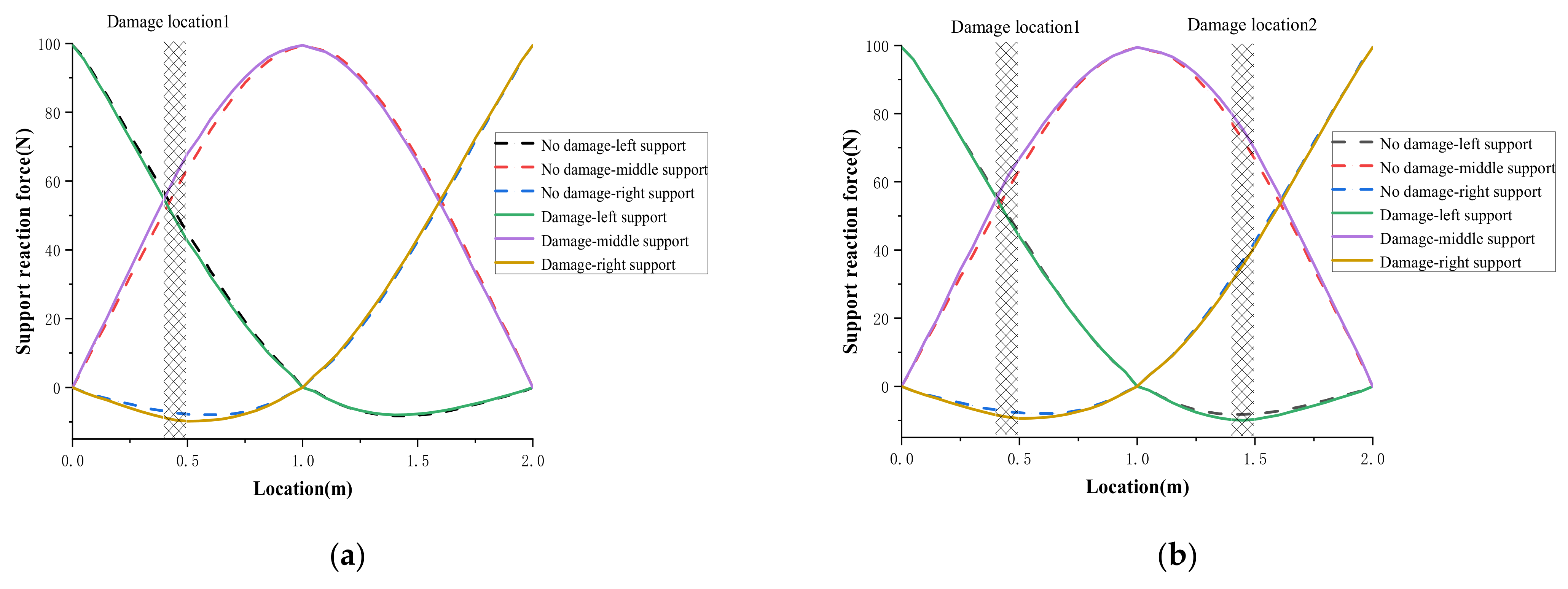
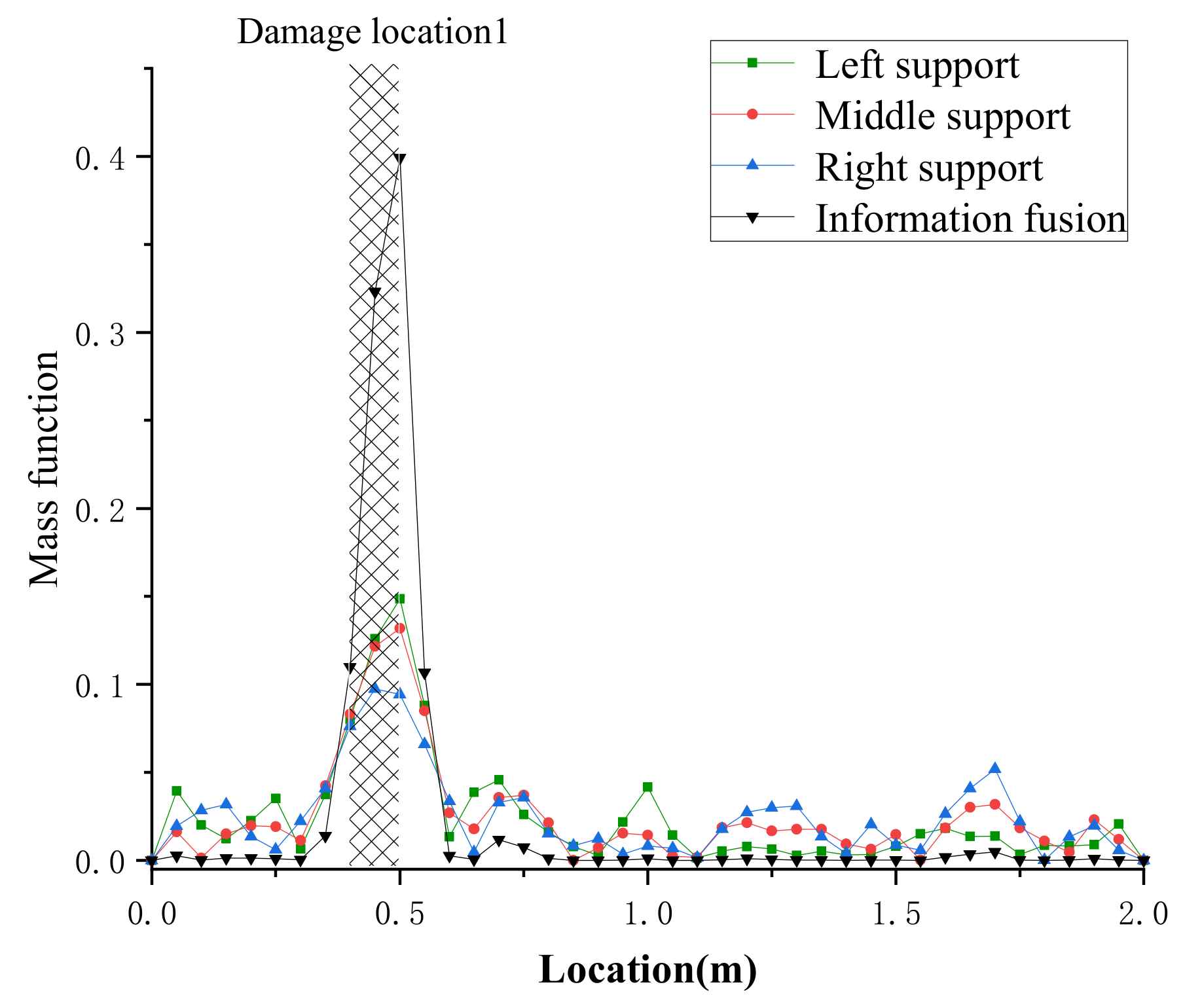
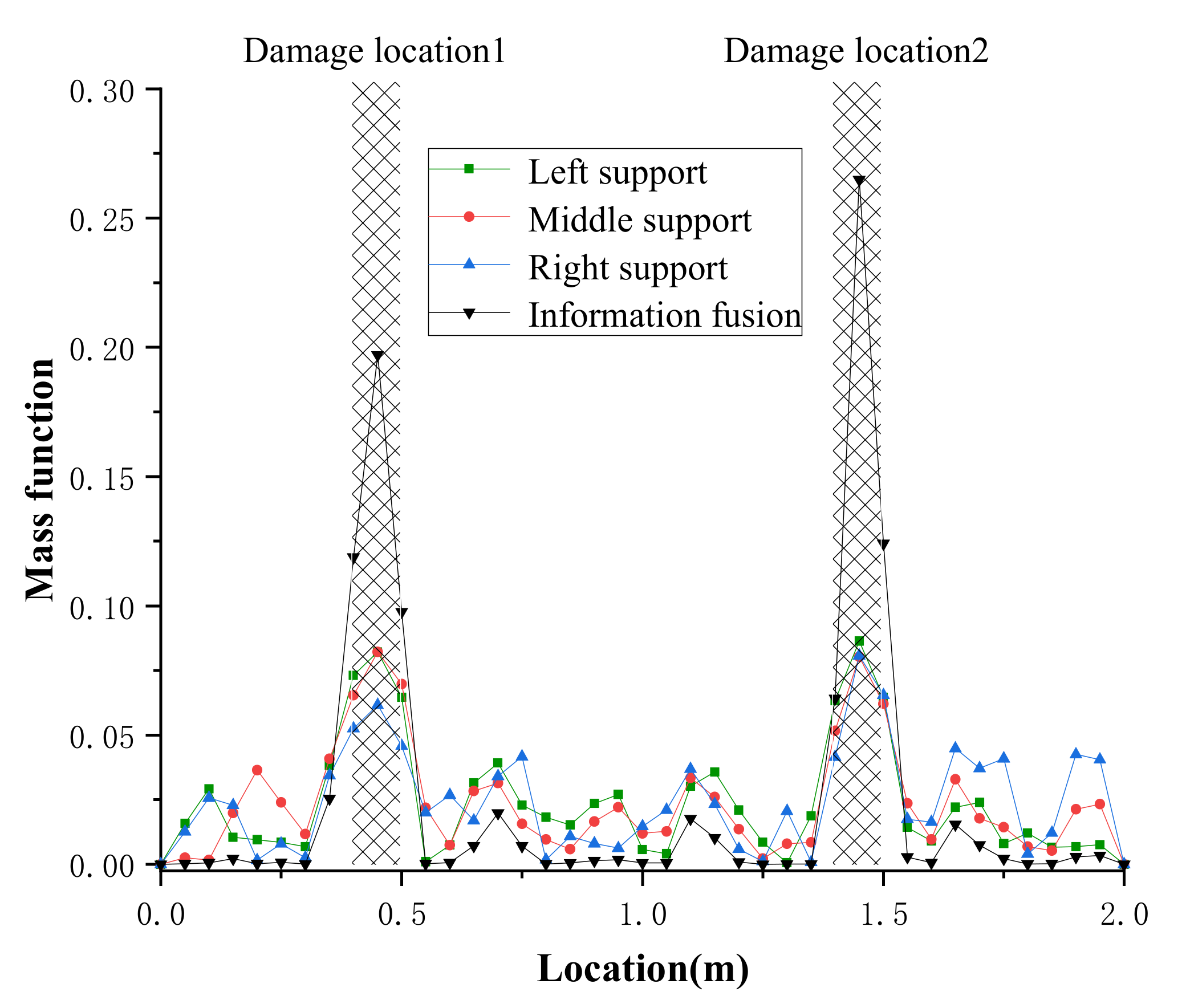
4.2. Case Study 2: Laboratory Experiment of a Two-Span Aluminum Beam
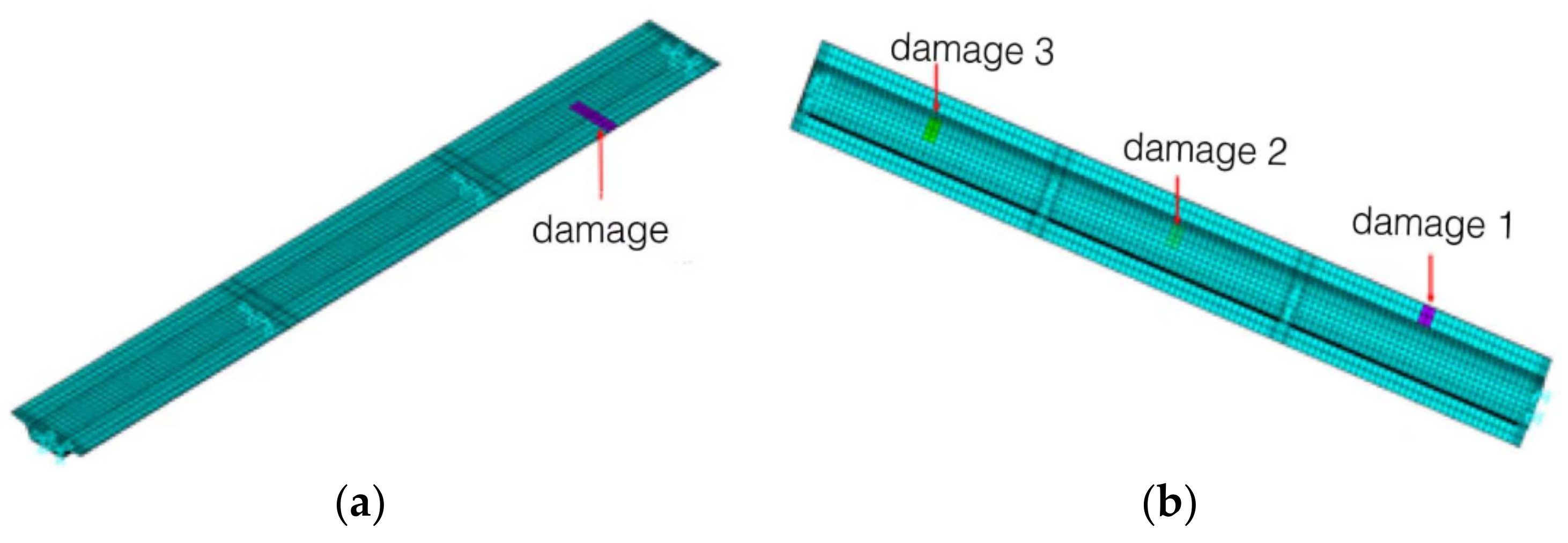
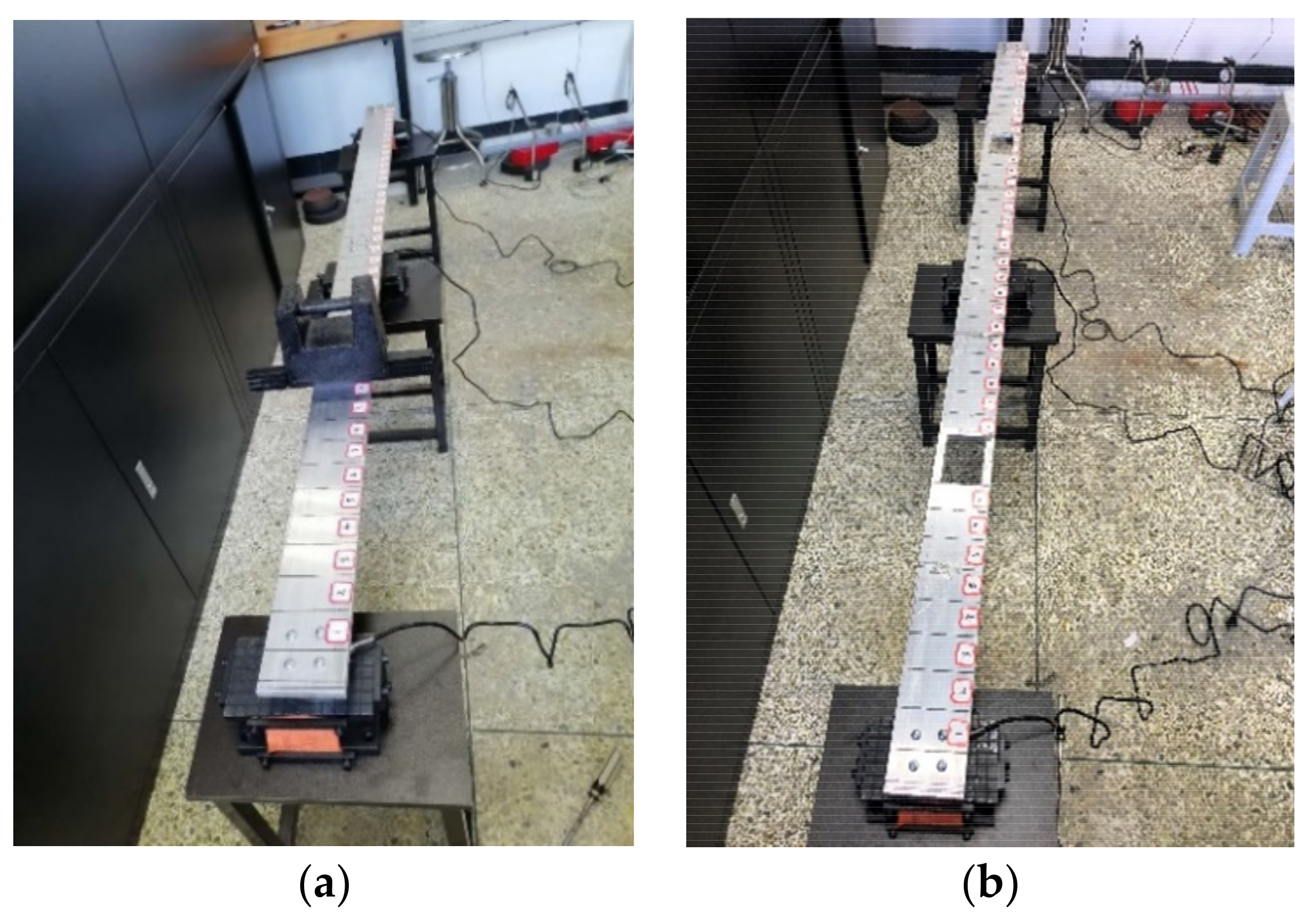
4.2.1. Experiment Introduction
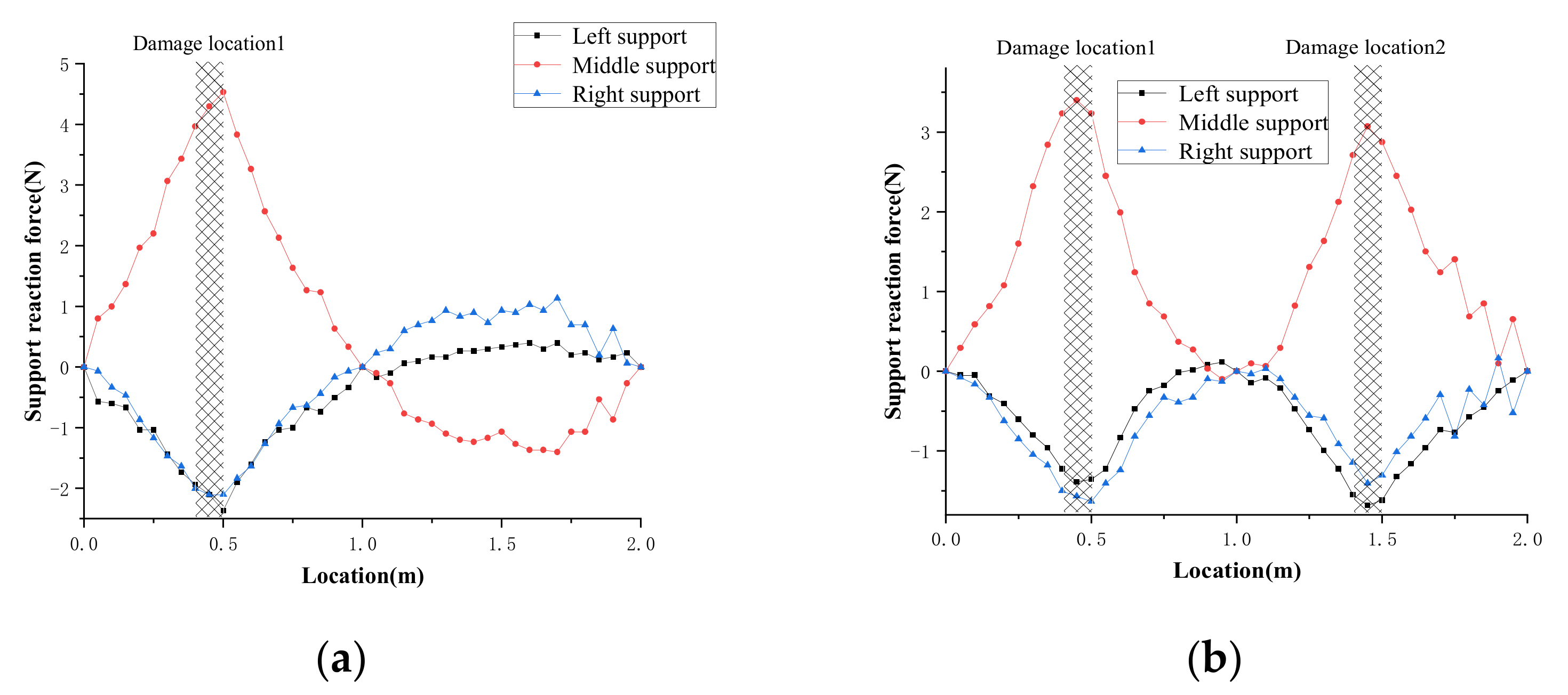
- Single damage case: A single damage was introduced at 0.4–0.5 m from the section, with a moment of inertia reduction of 70% by making a hole.
- Double damage case: Afterwards, the second damage was introduced at 1.4–1.5 m from the section in a similar manner. The corresponding moment of inertia reduction was relatively smaller (60%).
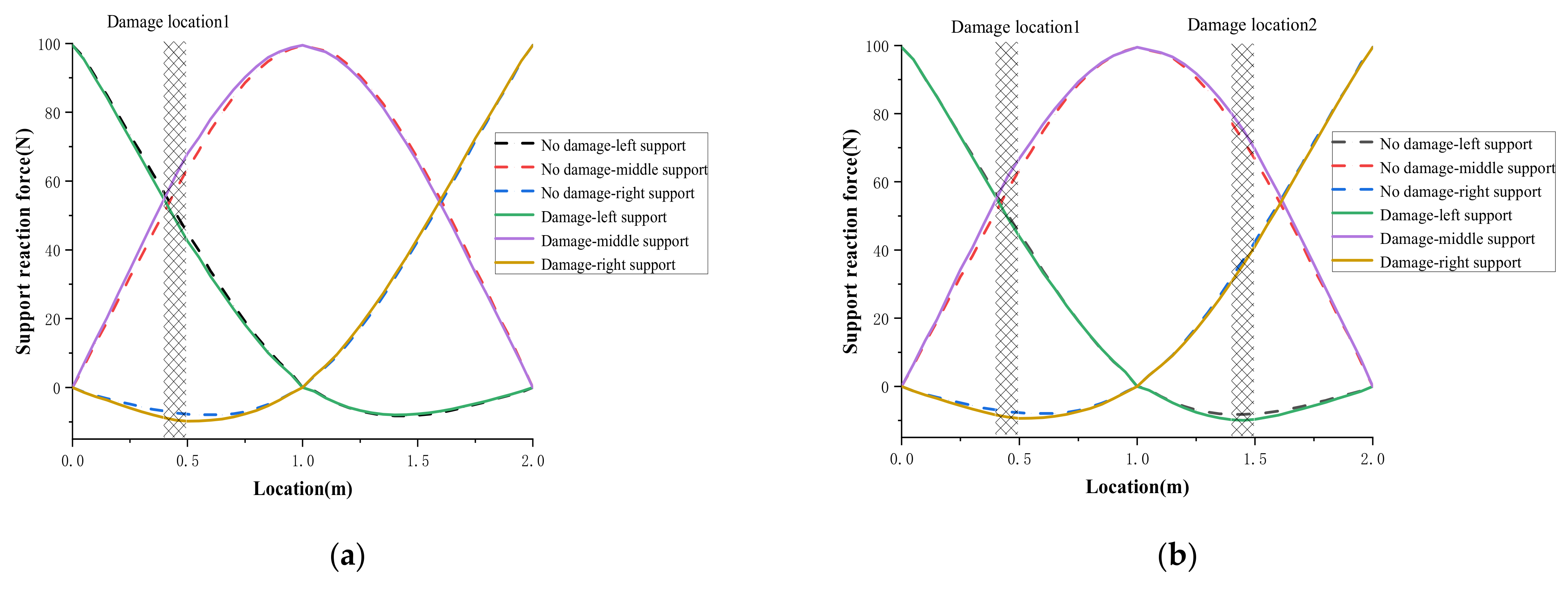
4.2.2. Support Reaction Influence Line Indicator Calculation
4.2.3. Damage Location Results
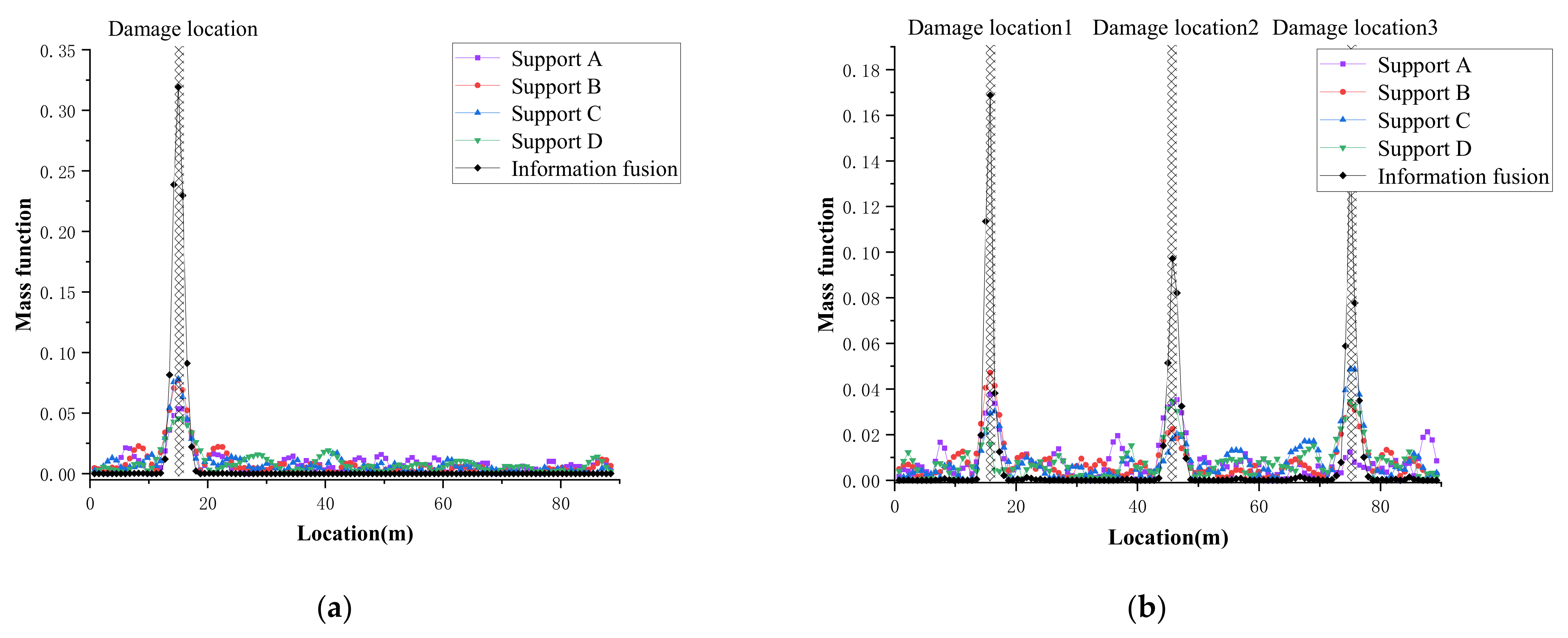
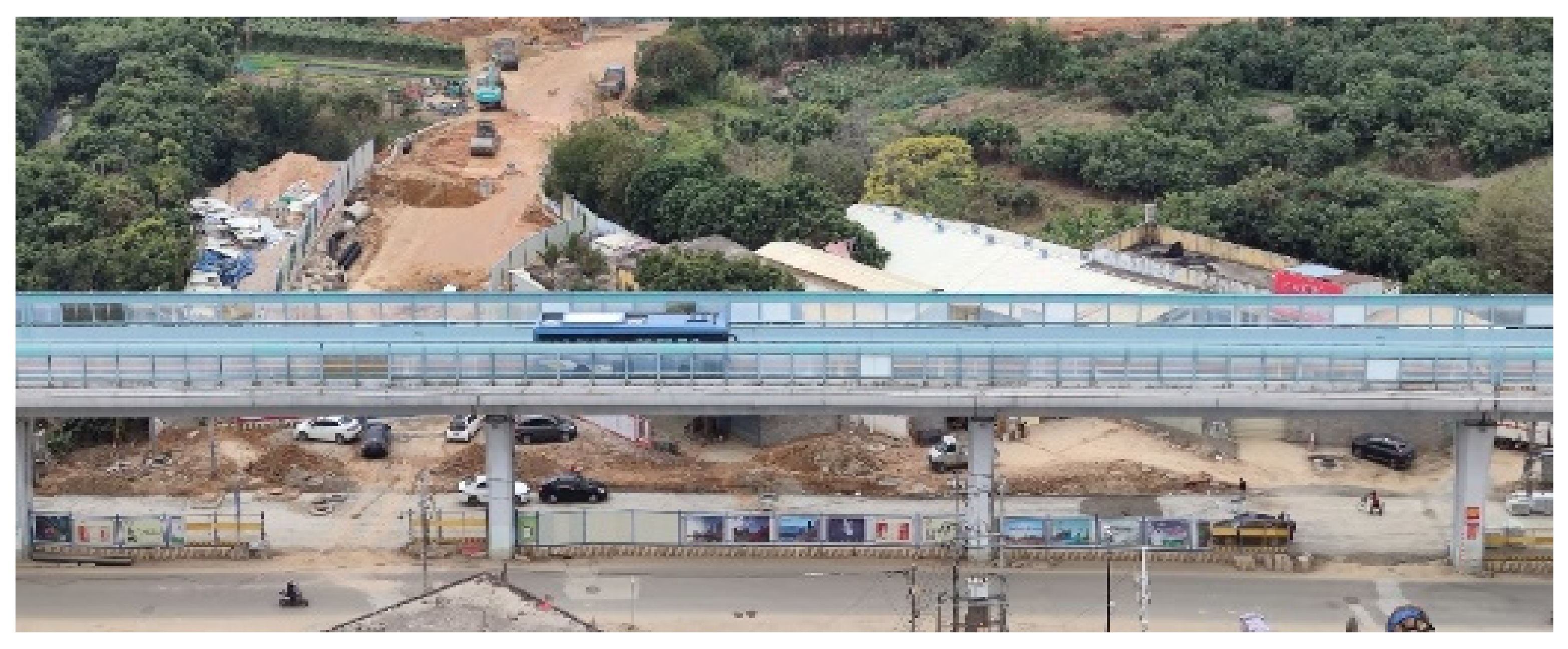
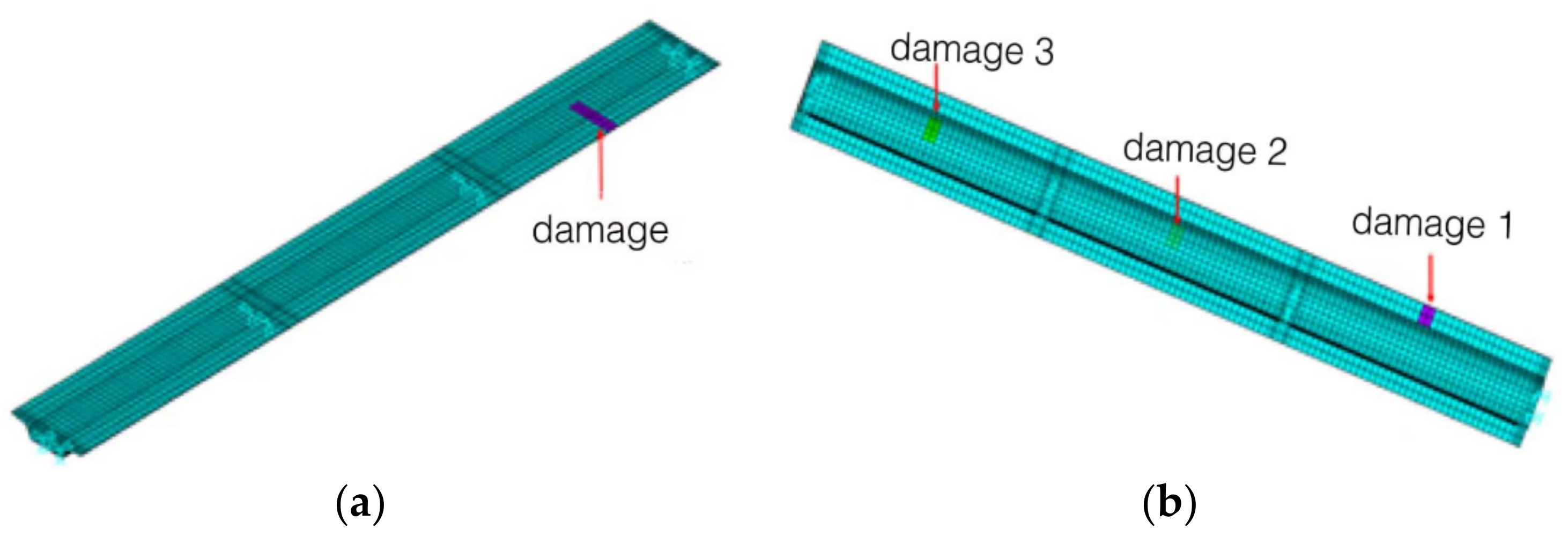
4.3. Case Study 3: BRT Continuous Box Girder Bridge
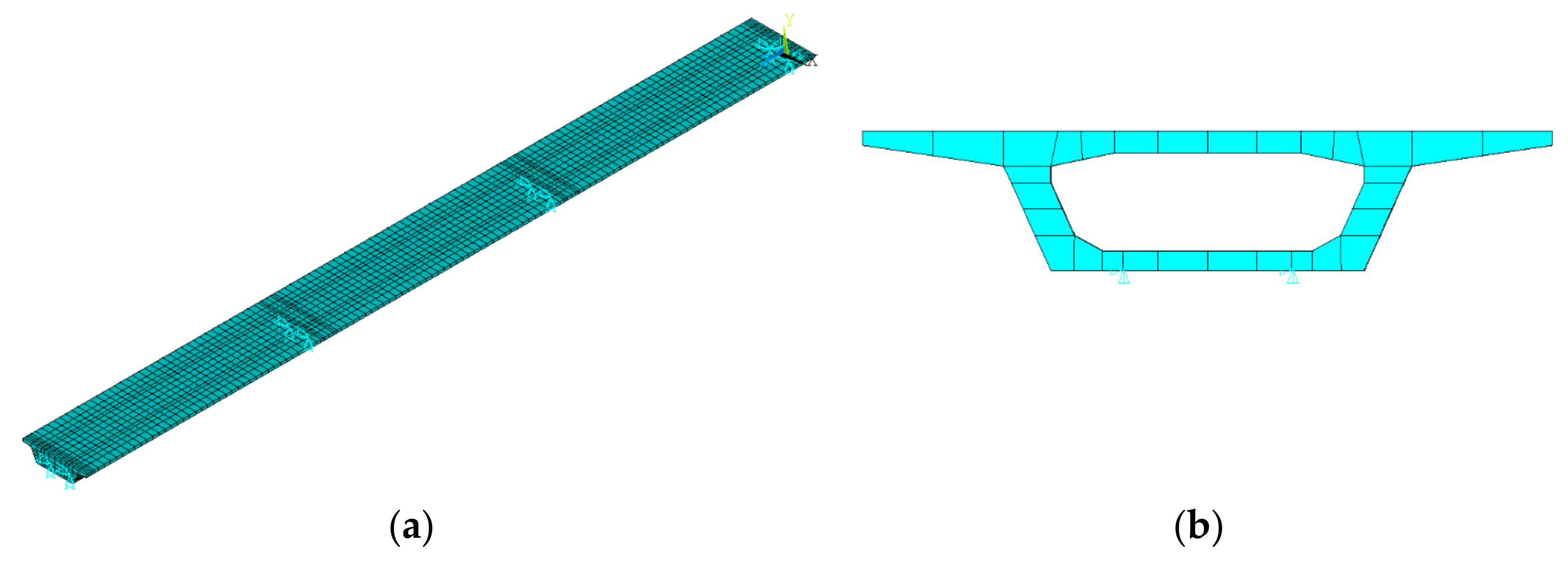
4.3.1. Finite Element Model of the BRT Bridge
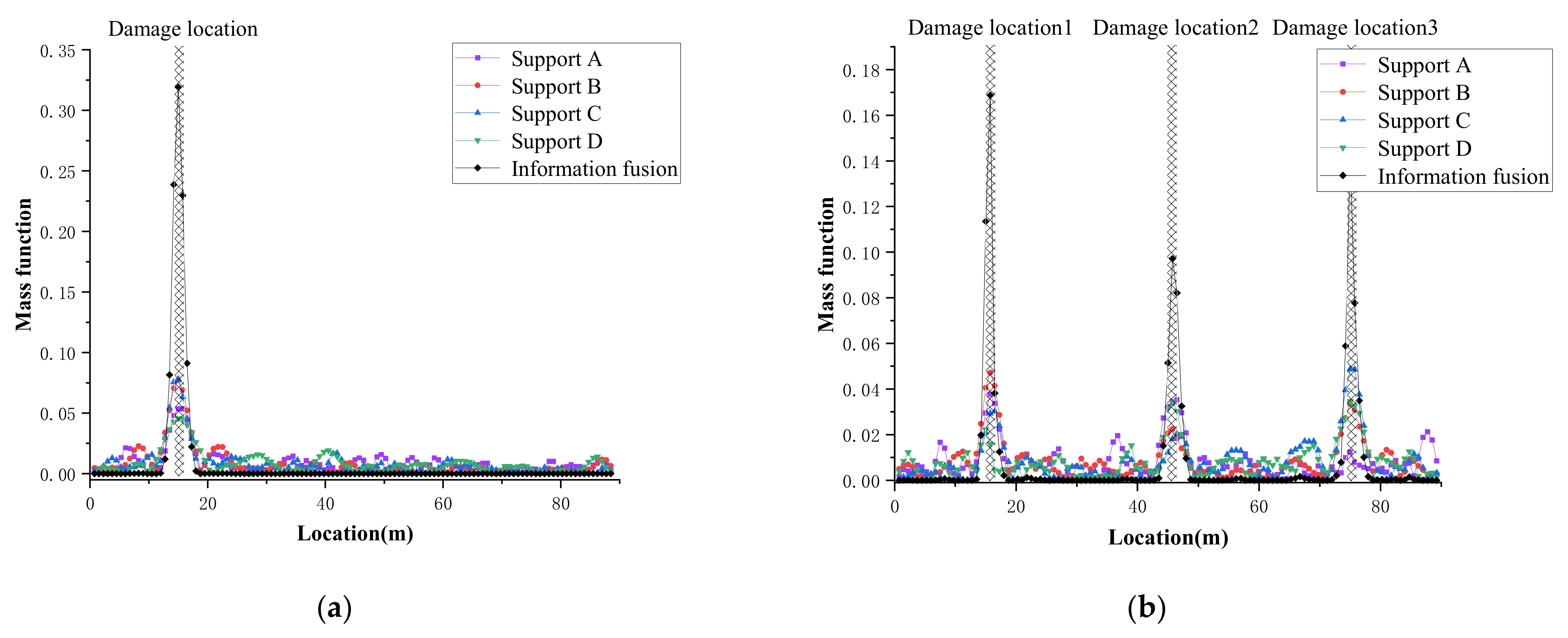
4.3.2. Validation Results of Different Hypothetical Scenarios
5. Parameter Analysis
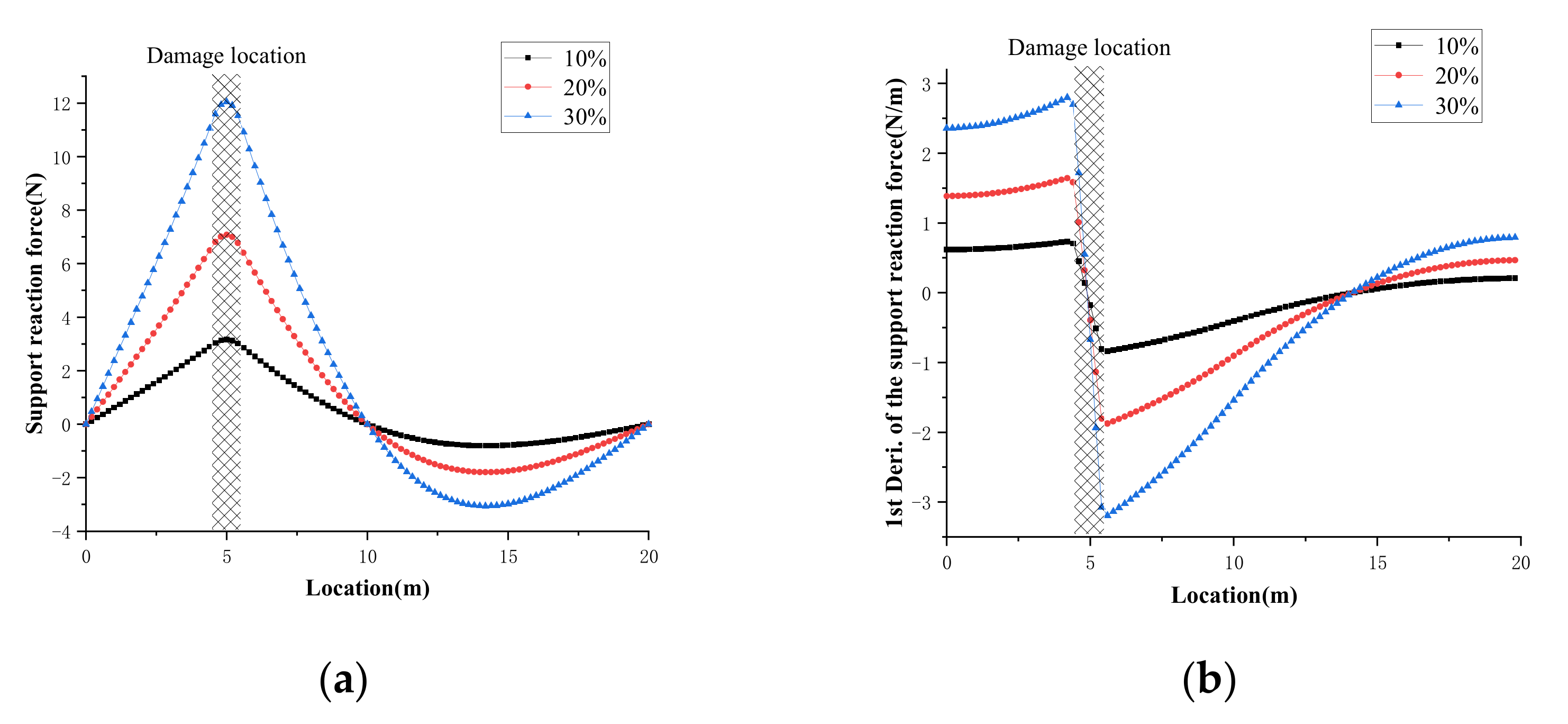
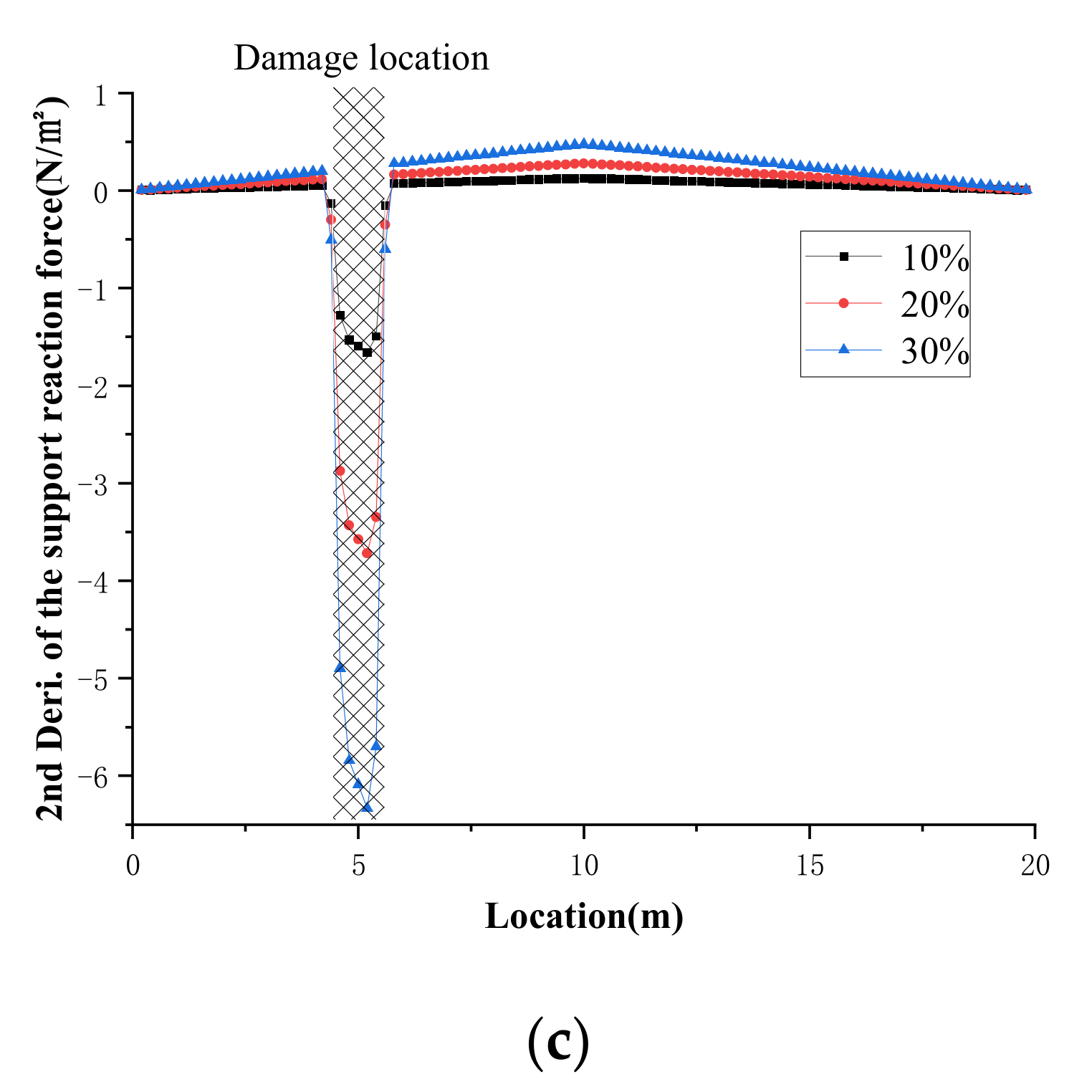
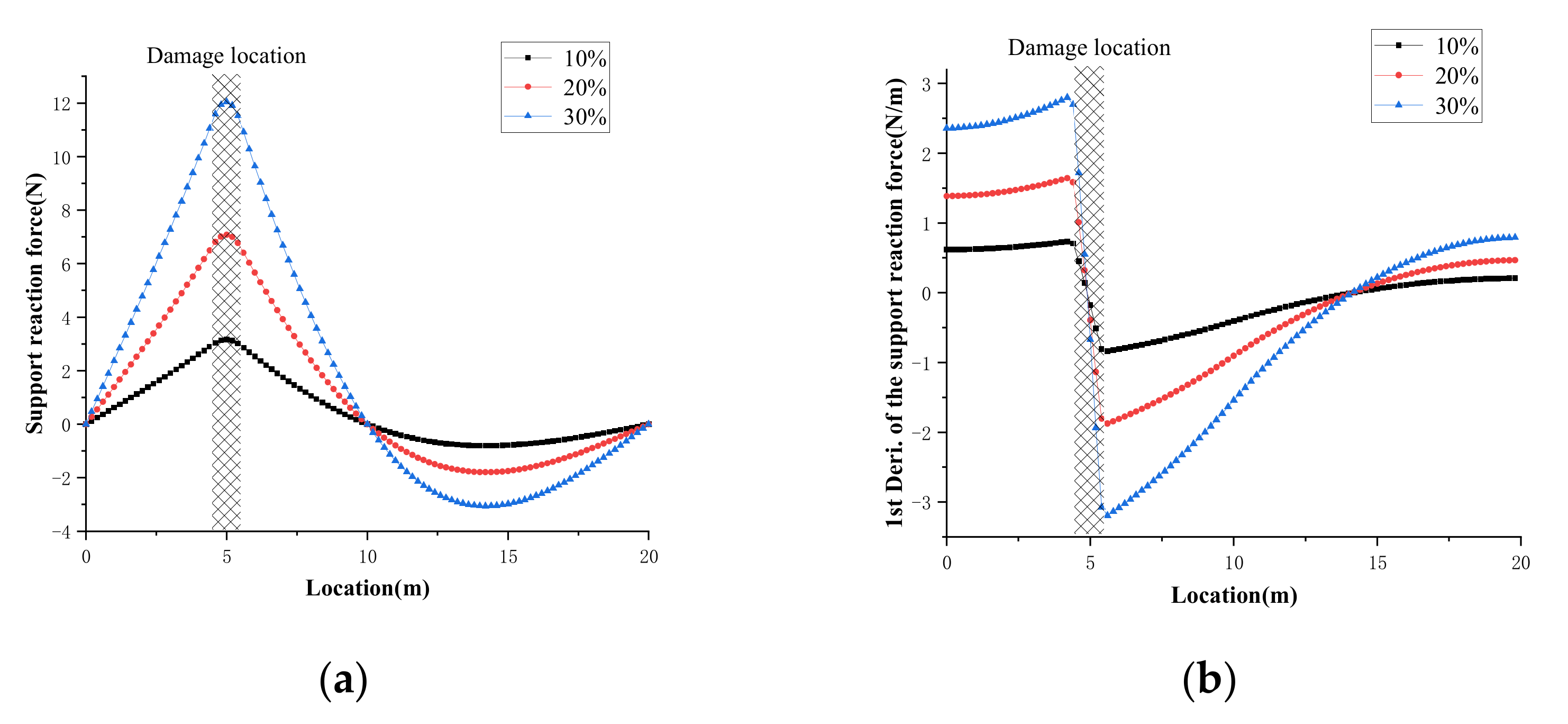
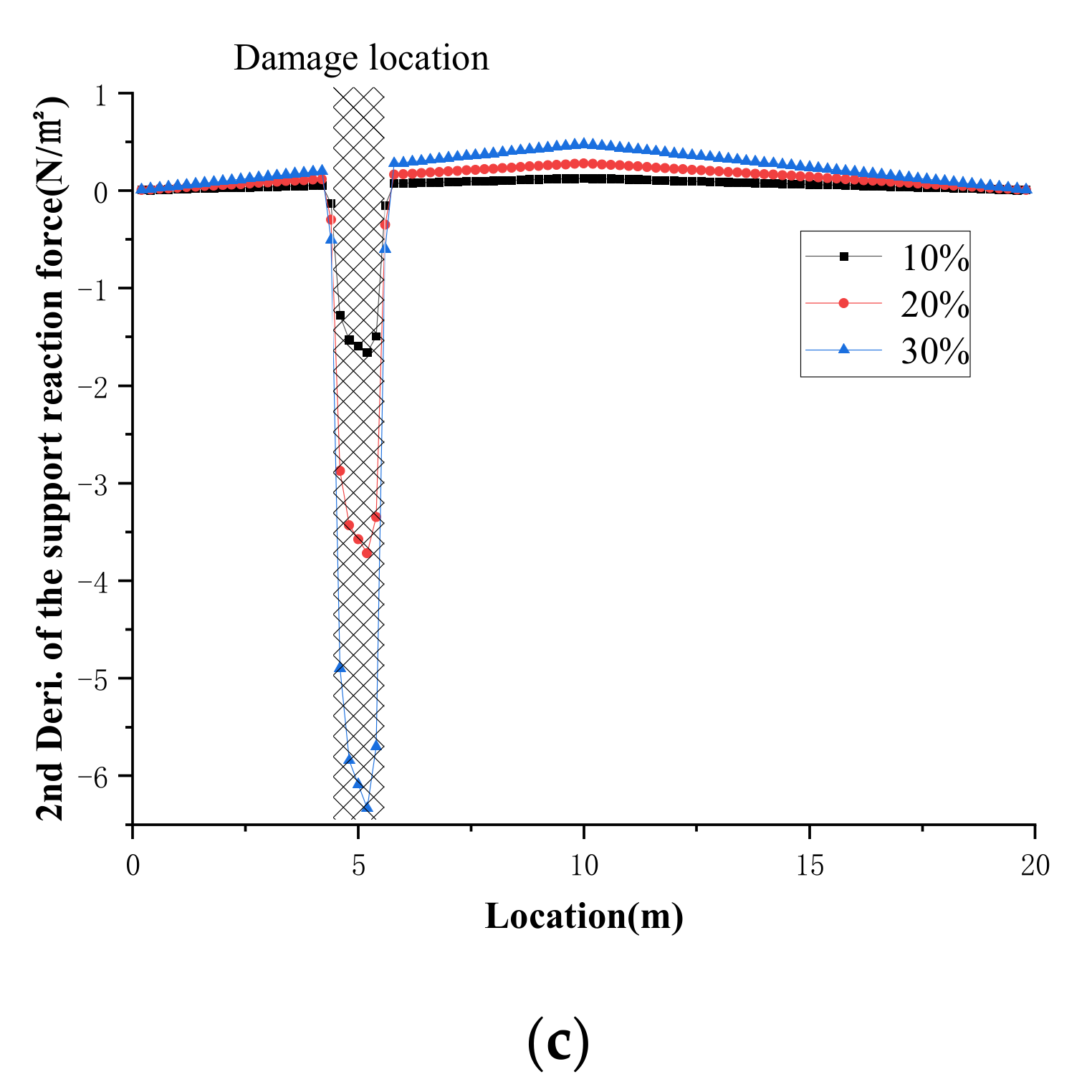
5.1. Effect of Damage Degree in Case Study 1
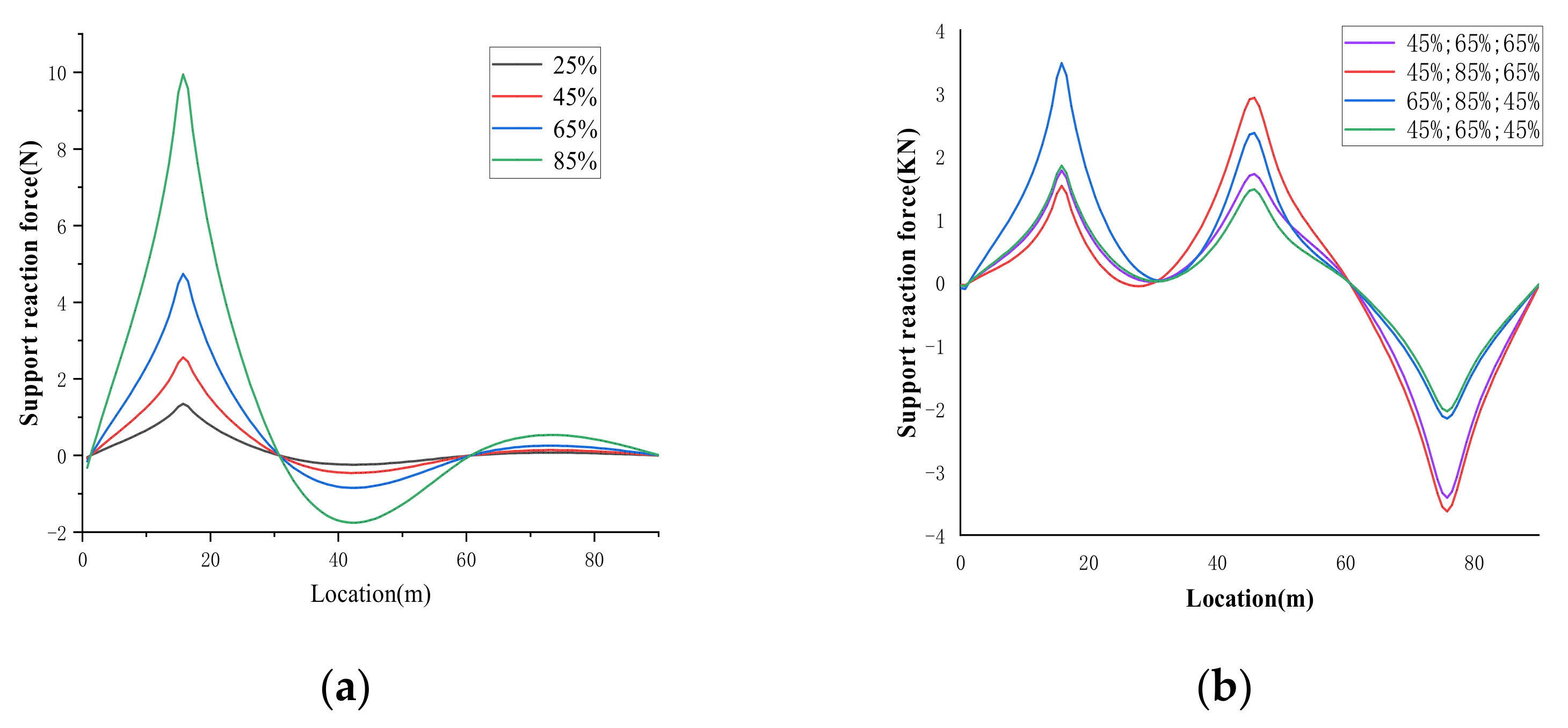
5.2. Effect of Damage Degree in Case Study 3
6. Conclusions
- The relationship between the local damage of a continuous beam and support reaction IL change has been established by formula derivation, which provides a theoretical basis for the damage location of the support reaction IL-based damage index.
- It was observed that the support reaction IL-based damage index has strong noise resistance and robustness due to the use of a cubic smooth spline curve to fit the IL polluted by noise and D-S evidence theory to fuse the data of the multi-support reaction ILs.
- The detection performance of numerical cases demonstrates that the usage of a cubic smoothing spline function to fit the change of the measured support reaction IL can get a result closer to the true value, successfully resolving the problem of the second derivative index of the IL change being sensitive to noise.
- In addition, the application of D-S evidence theory to fuse the ILs information of multiple measuring locations in order to construct the mass function can effectively reduce the interference of inconsistent information, thereby identifying the location of damages in continuous girder bridges accurately.
- Different from the damage index that is sensitive to local damage (e.g., stress influence line), the support-reaction influence line is a more global index, which is less sensitive but has a wider detectable range.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Banan, M.R.; Mehdi-Pour, Y. Detection and assessment of damage in 2D structures using measured modal response. J. Sound Vib. 2007, 306, 803–817. [Google Scholar] [CrossRef]
- Hu, M.-H.; Tu, S.-T.; Xuan, F.-Z.; Xia, C.-M.; Shao, H.-H. Strain energy numerical technique for structural damage detection. Appl. Math. Comput. 2012, 219, 2424–2431. [Google Scholar] [CrossRef]
- Chen, Z.-W.; Zhu, S.; Xu, Y.-L.; Li, Q.; Cai, Q.-L. Damage detection in long suspension bridges using stress influence lines. J. Bridge Eng. 2015, 20, 05014013. [Google Scholar] [CrossRef]
- Narkis, Y. Identification of crack location in vibrating simply supported beams. J. Sound Vib. 1994, 172, 549–558. [Google Scholar] [CrossRef]
- Cawley, P.; Adams, R.D. The location of defects in structures from measurements of natural frequencies. J. Strain Anal. Eng. Des. 1979, 14, 49–57. [Google Scholar] [CrossRef]
- Khiem, N.; Lien, T. Multi-crack detection for beam by the natural frequencies. J. Sound Vib. 2004, 273, 175–184. [Google Scholar] [CrossRef]
- He, W.-Y.; Zhu, S. Moving load-induced response of damaged beam and its application in damage localization. J. Vib. Control. 2016, 22, 3601–3617. [Google Scholar] [CrossRef]
- Pandey, A.; Biswas, M.; Samman, M. Damage detection from changes in curvature mode shapes. J. Sound Vib. 1991, 145, 321–332. [Google Scholar] [CrossRef]
- Stubbs, N.; Kim, J.-T. Damage localization in structures without baseline modal parameters. AIAA J. 1996, 34, 1644–1649. [Google Scholar] [CrossRef]
- Wang, J.; Qiao, P. On irregularity-based damage detection method for cracked beams. Int. J. Solids Struct. 2008, 45, 688–704. [Google Scholar] [CrossRef] [Green Version]
- Faverjon, B.; Sinou, J.-J. Robust damage assessment of multiple cracks based on the frequency response function and the Constitutive Relation Error updating method. J. Sound Vib. 2008, 312, 821–837. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Lieven, N.; Escamilla-Ambrosio, P.J. Frequency response function shape-based methods for structural damage localisation. Mech. Syst. Signal Process. 2009, 23, 1243–1259. [Google Scholar] [CrossRef]
- Shi, Z.; Law, S.; Zhang, L. Structural damage localization from modal strain energy change. J. Sound Vib. 1998, 218, 825–844. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, D.-H.; Yi, T.-H.; Li, H.-N. Development of bridge influence line identification methods based on direct measurement data: A comprehensive review and comparison. Eng. Struct. 2019, 198, 109539. [Google Scholar] [CrossRef]
- Chen, Z.-W.; Zhao, L.; Zhang, J.; Cai, Q.-L.; Li, J.; Zhu, S. Damage quantification of beam structures using deflection influence line changes and sparse regularization. Adv. Struct. Eng. 2021, 24, 1997–2010. [Google Scholar] [CrossRef]
- Wang, N.-B.; Ren, W.-X.; Huang, T.-L. Baseline-free damage detection method for beam structures based on an actual influence line. Smart Struct. Syst. 2019, 24, 475–490. [Google Scholar]
- Liu, Y.; Zhang, S. Damage localization of beam bridges using quasi-static strain influence lines based on the BOTDA technique. Sensors 2018, 18, 4446. [Google Scholar] [CrossRef] [Green Version]
- Zaurin, R.; Necati Catbas, F. Structural health monitoring using video stream, influence lines, and statistical analysis. Struct. Health Monit. 2011, 10, 309–332. [Google Scholar] [CrossRef]
- Chen, Z.W.; Cai, Q.L.; Zhu, S. Damage quantification of beam structures using deflection influence lines. Struct. Control. Health Monit. 2018, 25, e2242. [Google Scholar] [CrossRef]
- Alamdari, M.M.; Kildashti, K.; Samali, B.; Goudarzi, H.V. Damage diagnosis in bridge structures using rotation influence line: Validation on a cable-stayed bridge. Eng. Struct. 2019, 185, 1–14. [Google Scholar] [CrossRef]
- Huseynov, F.; Kim, C.; Obrien, E.J.; Brownjohn, J.; Hester, D.; Chang, K. Bridge damage detection using rotation measurements–Experimental validation. Mech. Syst. Signal Processing 2020, 135, 106380. [Google Scholar] [CrossRef]
- Zheng, X.; Yi, T.-H.; Yang, D.-H.; Li, H.-N. Stiffness Estimation of Girder Bridges Using Influence Lines Identified from Vehicle-Induced Structural Responses. J. Eng. Mech. 2021, 147, 04021042. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, X. Damage Localization Method Using Vertical Support Reaction Data for Real-world Continuous Bridge. In Sustainable Development of Critical Infrastructure; ASCE: Reston, VA, USA, 2014; pp. 447–454. [Google Scholar]
- Sun, L.; Li, Y.; Zhang, W. Experimental Study on Continuous Bridge-Deflection Estimation through Inclination and Strain. J. Bridge Eng. 2020, 25, 04020020. [Google Scholar] [CrossRef]
- de Boor, C. Spline Models for Observational Data; Wahba, G., Ed.; SIAM: Philadelphia, PA, USA, 1990. [Google Scholar]
- Basir, O.; Yuan, X. Engine fault diagnosis based on multi-sensor information fusion using Dempster–Shafer evidence theory. Inf. Fusion 2007, 8, 379–386. [Google Scholar] [CrossRef]
- Jiang, S.-F.; Zhang, C.-M.; Zhang, S. Two-stage structural damage detection using fuzzy neural networks and data fusion techniques. Expert Syst. Appl. 2011, 38, 511–519. [Google Scholar] [CrossRef]
- Guo, H.; Zhang, L. A weighted balance evidence theory for structural multiple damage localization. Comput. Methods Appl. Mech. Eng. 2006, 195, 6225–6238. [Google Scholar] [CrossRef]
- Yager, R.R. On the Dempster-Shafer framework and new combination rules. Inf. Sci. 1987, 41, 93–137. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. In Classic Works of the Dempster-Shafer Theory of Belief Functions; Springer: Berlin/Heidelberg, Germany, 2008; pp. 57–72. [Google Scholar]
- Schocken, S.; Hummel, R.A. On the use of the Dempster Shafer model in information indexing and retrieval applications. Int. J. Man-Mach. Stud. 1993, 39, 843–879. [Google Scholar] [CrossRef] [Green Version]
- Yager, R.R. Dempster–Shafer belief structures with interval valued focal weights. Int. J. Intell. Syst. 2001, 16, 497–512. [Google Scholar] [CrossRef]
- Yang, B.-S.; Kim, K.J. Application of Dempster–Shafer theory in fault diagnosis of induction motors using vibration and current signals. Mech. Syst. Signal Process. 2006, 20, 403–420. [Google Scholar] [CrossRef]
- Banerjee, T.P.; Das, S. Multi-sensor data fusion using support vector machine for motor fault detection. Inf. Sci. 2012, 217, 96–107. [Google Scholar] [CrossRef]
- Guo, H. Structural damage detection using information fusion technique. Mech. Syst. Signal Process. 2006, 20, 1173–1188. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | ||||
|---|---|---|---|---|
| S1 | 0.25 | 0.1 | 0.8 | 0.2 |
| S2 | 0.75 | 0.1 | 0.8 | 0.2 |
| S3 c | 0.45 | 0.1 | 0.7 | 0.3 |
| 0.75 | 0.1 | 0.8 | 0.2 | |
| S4 c | 0.75 | 0.1 | 0.8 | 0.2 |
| 1.65 | 0.1 | 0.7 | 0.3 |
| Case | Damage Location | Damage Level | Relative to the Vehicle |
|---|---|---|---|
| Single damage | 14.25 m–15.75 m (roof) | 0.7 | Ipsilateral |
| Multiple damage | 14.25 m–15.75 m (roof) | 0.6 | Ipsilateral |
| 44.25 m–45.75 m (bottom plate) | 0.7 | Ipsilateral | |
| 74.25 m–75.75 m (bottom plate) | 0.6 | Ipsilateral |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Q.; Ruan, X.; Wang, Y.; Chen, Z. Serious Damage Localization of Continuous Girder Bridge by Support Reaction Influence Lines. Buildings 2022, 12, 182. https://doi.org/10.3390/buildings12020182
Cheng Q, Ruan X, Wang Y, Chen Z. Serious Damage Localization of Continuous Girder Bridge by Support Reaction Influence Lines. Buildings. 2022; 12(2):182. https://doi.org/10.3390/buildings12020182
Chicago/Turabian StyleCheng, Qifeng, Xuzhi Ruan, Yize Wang, and Zhiwei Chen. 2022. "Serious Damage Localization of Continuous Girder Bridge by Support Reaction Influence Lines" Buildings 12, no. 2: 182. https://doi.org/10.3390/buildings12020182
APA StyleCheng, Q., Ruan, X., Wang, Y., & Chen, Z. (2022). Serious Damage Localization of Continuous Girder Bridge by Support Reaction Influence Lines. Buildings, 12(2), 182. https://doi.org/10.3390/buildings12020182