
Tuned-Mass-Damper-Inerter Performance Evaluation and Optimal Design for Transmission Line under Harmonic Excitation

 ,
,  , ,
, , 
Abstract
:1. Introduction
2. Dynamics Model
2.1. Equation of Motion
2.2. Closed-Form Solution of Displacement Response Spectrum
2.3. Closed-Form Solution of Optimization for TMDI
3. Numerical Examples
3.1. Parameter Optimization Analysis
3.2. Parameters Sensitivity Analysis
3.3. Vibration Control Performance of TMDI
4. Conclusions
- (1)
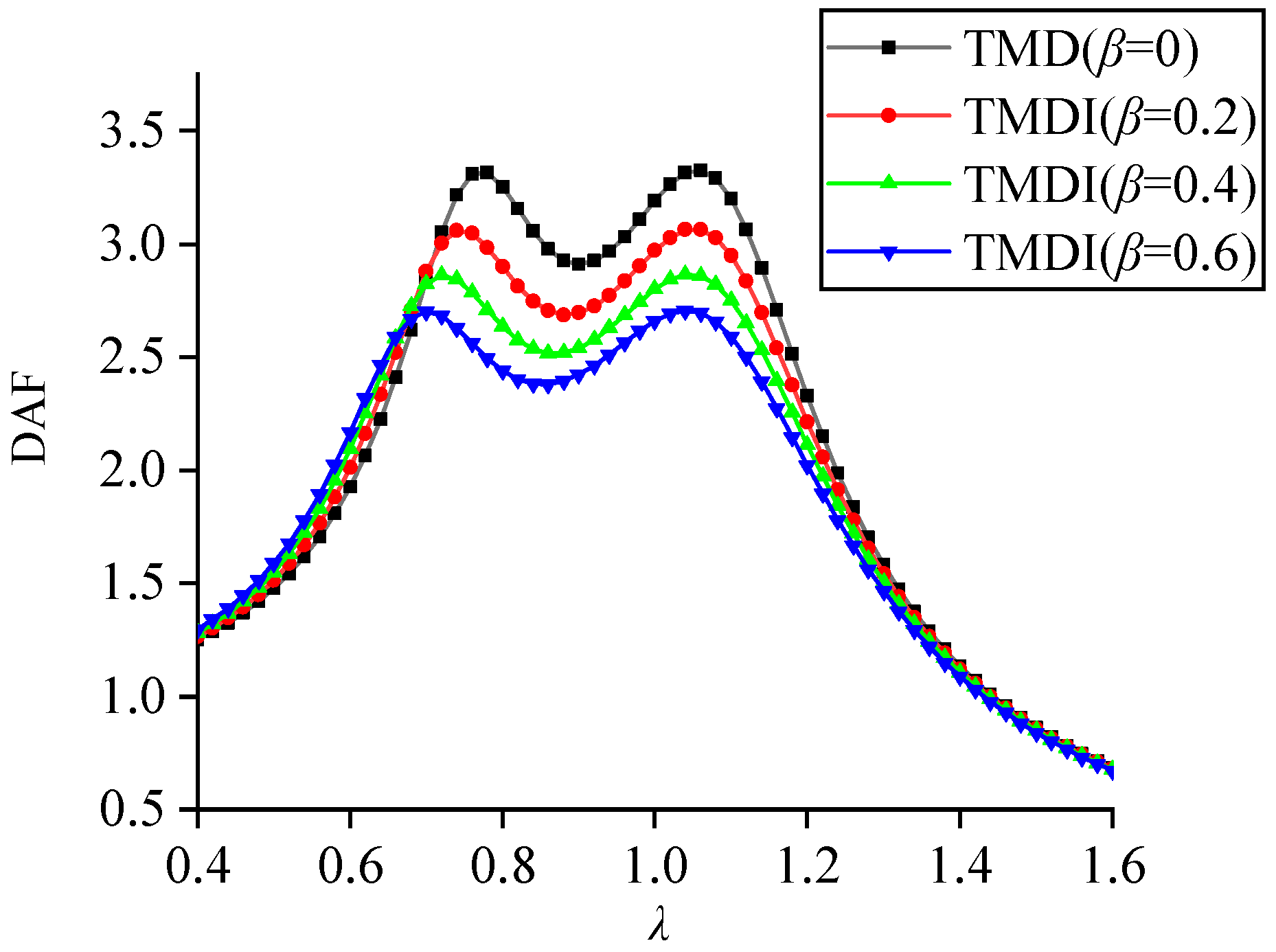
- With the increase in apparent mass ratio, β, the vibration control performance of TMDI increases. When β = 0.6, the dynamic amplification factor of the transmission line can be reduced by 30% compared with conventional TMD. In addition, the increase in β has a positive impact on the frequency band width of TMDIs vibration suppression;
- (2)
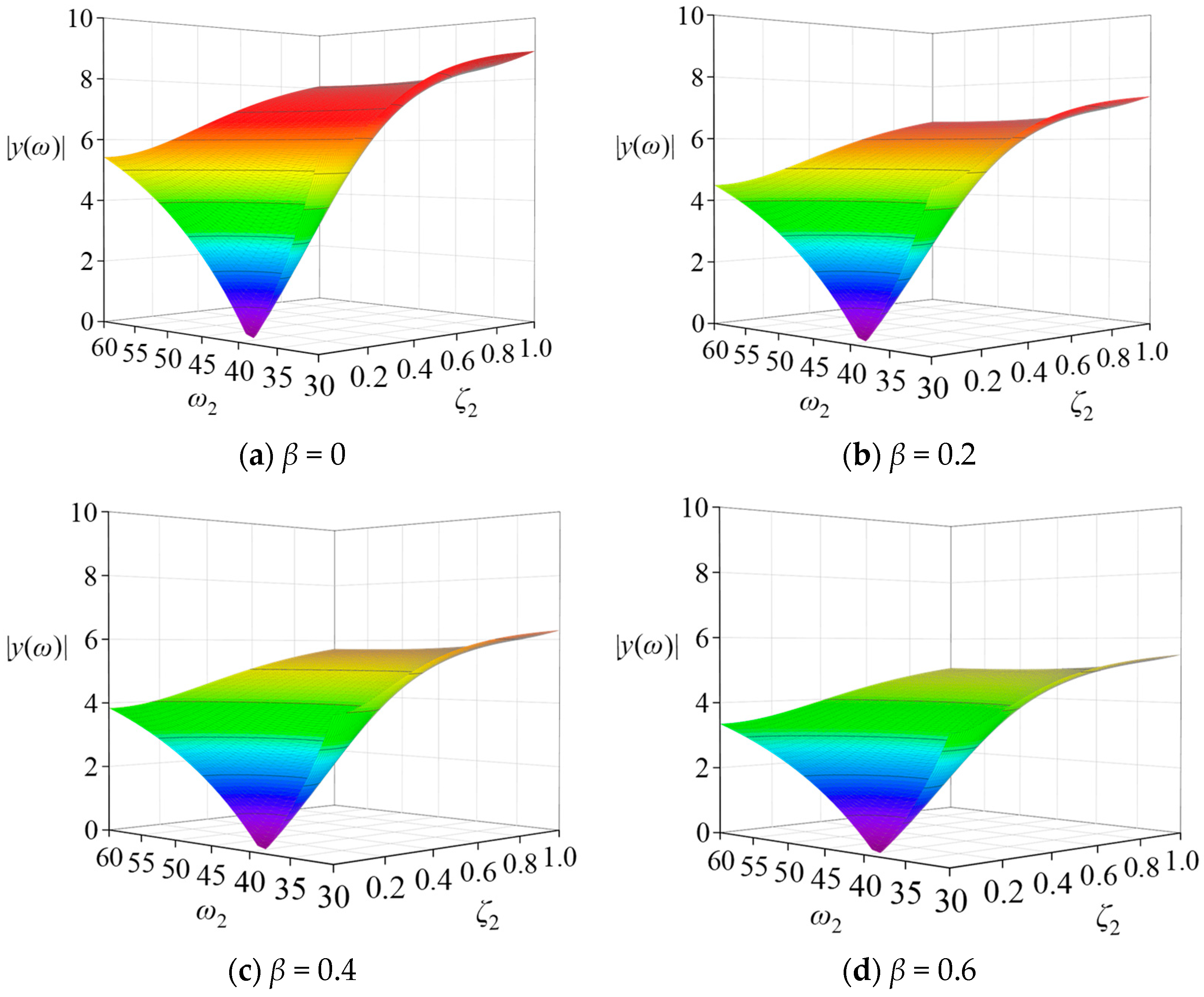
- The vibration control performance of TMDI is greatly affected by the frequency ratio, but the effect of the damping ratio is limited;
- (3)
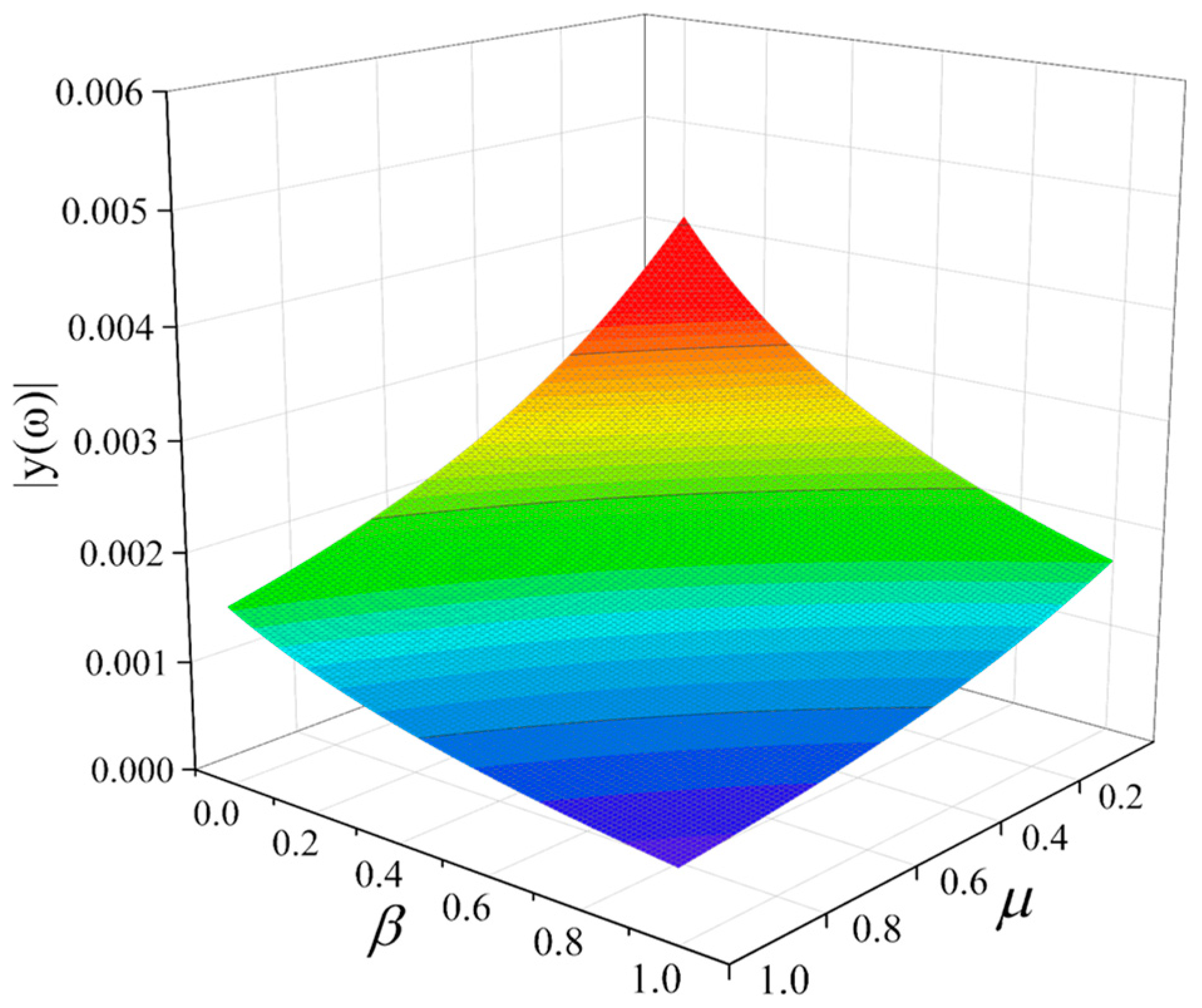
- Both mass ratio and apparent mass ratio, especially β < 0.2 or μ < 0.4, have positive effects on the vibration control performance of TMDI. However, with the increase in mass ratio and apparent mass ratio, of which, the influence on the vibration control performance of TMDI gradually decreases;
- (4)
- When the mass ratio μ = 0.02, the peak value of the transmission displacement response spectrum is about 1.34. Compared with TMD, the peak value of the response spectrum decreases by about 12%, and TMDI has better vibration reduction performance than TMD.
Author Contributions
Funding
Conflicts of Interest
References
- Williamson, C.; Govardhan, R. A brief review of recent results in vortex-induced vibrations. J. Wind Eng. Ind. Aerodyn. 2008, 96, 713–735. [Google Scholar] [CrossRef]
- Andika, M.G.; Purabaya, W. Suppression of Resonance Induced Vibration Because of Wind Load at Bridge Structure by Using Passive Damper. Int. J. Technol. Eng. Stud. 2018, 4, 112–119. [Google Scholar]
- Guo, K.; Yang, Q.; Liu, M.; Li, B. Aerodynamic Damping Model for Vortex-induced Vibration of Suspended Circular Cylinder in Uniform Flow. J. Wind Eng. Ind. Aerodyn. 2021, 209, 104497. [Google Scholar] [CrossRef]
- Han, Y.; Zhou, X.; Wang, L.; Cai, C.S.; Yan, H.; Hu, P. Experimental investigation of the vortex-induced vibration of tapered light poles. J. Wind Eng. Ind. Aerodyn. 2021, 211, 104555. [Google Scholar] [CrossRef]
- Griffin, O.M. Some Recent Studies of Vortex Shedding With Application to Marine Tubulars and Risers. J. Energy Resour. Technol. 1982, 104, 2–13. [Google Scholar] [CrossRef]
- Khalak, A.; Williamson, C. Motions, Forces and Mode Transitions in Vortex-Induced Vibrations at Low Mass-Damping. J. Fluids Struct. 1999, 13, 813–851. [Google Scholar] [CrossRef]
- Blackburn, H.M.; Govardhan, R.N.; Williamson, C. Erratum: A complementary numerical and physical investigation of vortex-induced vibration. J. Fluids Struct. 2001, 15, 481–488. [Google Scholar] [CrossRef] [Green Version]
- Sarpkaya, T. A critical review of the intrinsic nature of vortex-induced vibrations. J. Fluids Struct. 2004, 19, 389–447. [Google Scholar] [CrossRef]
- Gabbai, R.D.; Benaroya, H. An overview of modeling and experiments of vortex-induced vibration of circular cylinders. J. Sound Vib. 2005, 282, 575–616. [Google Scholar] [CrossRef]
- Sumner, D. Two circular cylinders in cross-flow: A review. J. Fluids Struct. 2010, 26, 849–899. [Google Scholar] [CrossRef]
- Wu, X.; Fei, G.; Hong, Y. A review of recent studies on vortex-induced vibrations of long slender cylinders. J. Fluids Struct. 2012, 28, 292–308. [Google Scholar] [CrossRef] [Green Version]
- Mackowski, A.; Williamson, C. An experimental investigation of vortex-induced vibration with nonlinear restoring forces. Phys. Fluids 2013, 25, 087101. [Google Scholar] [CrossRef]
- Huynh, B.H.; Tjahjowidodo, T.; Zhong, Z.W.; Wang, Y.; Srikanth, N. Design and experiment of controlled bistable vortex induced vibration energy harvesting systems operating in chaotic regions. Mech. Syst. Signal Process. 2018, 98, 1097–1115. [Google Scholar] [CrossRef]
- Huang, X.; Yang, B. Investigation on the energy trapping and conversion performances of a multi-stable vibration absorber. Mech. Syst. Signal Process. 2021, 160, 107938. [Google Scholar] [CrossRef]
- Wang, E.; Xu, W.; Gao, X.; Liu, L.; Xiao, Q.; Ramesh, K. The effect of cubic stiffness nonlinearity on the vortex-induced vibration of a circular cylinder at low Reynolds numbers. Ocean. Eng. 2018, 173, 12–27. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Song, Y.; Abdelkefi, A.; Yu, H.; Wang, J. Vortex-Induced Vibration of a Circular Cylinder with Nonlinear Stiffness: Prediction Using Forced Vibration Data. Nonlinear Dyn. 2022. [Google Scholar] [CrossRef]
- Soto, M.G.; Adeli, H. Tuned Mass Dampers. Arch. Comput. Methods Eng. 2013, 20, 419–431. [Google Scholar] [CrossRef]
- Bitaraf, M.; Hurlebaus, S.; Barroso, L.R. Active and Semi-active Adaptive Control for Undamaged and Damaged Building Structures Under Seismic Load. Comput. -Aided Civ. Infrastruct. Eng. 2011, 27, 48–64. [Google Scholar] [CrossRef]
- Lei, Y.; Wu, D.T.; Lin, Y. A Decentralized Control Algorithm for Large-Scale Building Structures. Comput. Aided Civ. Infrastruct. Eng. 2012, 27, 2–13. [Google Scholar] [CrossRef]
- Nigdeli, S.M.; Boduroglu, M.H. Active Tendon Control of Torsionally Irregular Structures under Near-Fault Ground Motion Excitation. Comput. -Aided Civ. Infrastruct. Eng. 2013, 28, 718–736. [Google Scholar] [CrossRef]
- Hermann, F. Device for Damper Vibration of Bodies. 1909. Available online: https://patentimages.storage.googleapis.com/ac/69/ab/4191d1f88063d0/US989958.pdf (accessed on 28 March 2022).
- Laura, P.A.A. Discussion: Performance of Multiple Mass Dampers under Random Loading. J. Struct. Eng. 1996, 122, 981–982. [Google Scholar] [CrossRef]
- Lin, J.L.; Tsai, K.C.; Yu, Y.J. Bi-directional coupled tuned mass dampers for the seismic response control of two-way asymmetric-plan buildings. Earthq. Eng. Struct. Dyn. 2011, 40, 675–690. [Google Scholar] [CrossRef]
- Huang, M.F.; Tse, K.T.; Chan, C.M.; Lou, W. Integrated Structural Optimization and Vibration Control for Improving Wind-Induced Dynamic Performance of Tall Buildings. Int. J. Struct. Stab. Dyn. 2011, 11, 1139–1161. [Google Scholar] [CrossRef]
- Patil, V.B.; Jangid, R.S. Optimum Multiple Tuned Mass Dampers for the Wind Excited Benchmark Building. Statyba 2011, 17, 540–557. [Google Scholar]
- Nagase, T. Earthquake records observed in tall buildings with tuned pendulum mass damper. In Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand, 30 January–4 February 2000. [Google Scholar]
- Gerges, R.R.; Vickery, B.J. Optimum design of pendulum-type tuned mass dampers. Struct. Des. Tall Spec. Build. 2005, 14, 353–368. [Google Scholar] [CrossRef]
- Almazán, J.L.; Juan, C.; Inaudi, J.A.; López-García, D.; Izquierdo, L.E. A bidirectional and homogeneous tuned mass damper: A new device for passive control of vibrations. Eng. Struct. 2007, 29, 1548–1560. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, F. Tuned mass damper for self-excited vibration control: Optimization involving nonlinear aeroelastic effect. J. Wind Eng. Ind. Aerodyn. 2022, 220, 104836. [Google Scholar] [CrossRef]
- Wang, Z.; Li, H.N.; Song, G. Aeolian vibration control of Power Transmission line Using Stockbridge Type Dampers—A review. Int. J. Struct. Stab. Dyn. 2021, 21, 2130001. [Google Scholar] [CrossRef]
- Stockbridge, G.H. Vibration Damper. U.S. Patent 1,675,391, 3 July 1928. [Google Scholar]
- Claren, R.; Diana, G. Mathematical analysis of transmission line vibration. IEEE Trans. Power Appar. Syst. 1969, 12, 1741–1771. [Google Scholar] [CrossRef]
- Wagner, H.; Ramamurti, V.; Sastry RV, R.; Hartmann, K. Dynamics of Stockbridge dampers. J. Sound Vib. 1973, 30, 207–220, IN1–IN2. [Google Scholar] [CrossRef]
- Leblond, A.; Hardy, C. On the estimation of a 2 × 2 complex stiffness matrix of symmetric stockbridge-type dampers. In Proceedings of the 3rd International Symposium on Cable Dynamics, Trondheim, Norway, 16–18 August 1999. [Google Scholar]
- Luo, X.; Wang, L.; Zhang, Y. Nonlinear numerical model with contact for Stock-bridge vibration damper and experimental validation. J. Vib. Control. 2016, 22, 1217–1227. [Google Scholar] [CrossRef]
- Vaja, N.K.; Barry, O.; DeJong, B. Finite element modeling of Stockbridge damper and vibration analysis: Equivalent cable stiffness. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017. [Google Scholar] [CrossRef] [Green Version]
- Richardson, A.S. Vibration damping required for overhead lines. IEEE Trans. Power Deliv. 1995, 10, 934–940. [Google Scholar] [CrossRef]
- Vecchiarelli, J.; Currie, I.G.; Havard, D.G. Computational analysis of aeolian conductor vibration with a stockbridge type damper. J. Fluids Struct. 2000, 14, 489–509. [Google Scholar] [CrossRef]
- Zhang, B.; Gong, W.S.; Wang, Z.H.; Zhang, M.G.; Han, L.; Zhang, Y. Study on equivalent viscous damping of aeolian vibration for transmission line by AACSR-400 steel core alminum alloy wire. Key Eng. Mater. 2017, 723, 94–99. [Google Scholar] [CrossRef]
- Smith, M.C. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef] [Green Version]
- Arakaki, T.; Kuroda, H.; Arima, F.; Inoue, Y.; Baba, K. Development of seismic devices applied to ball screw: Part 1 Basic performance test of RD-series. J. Technol. Des. 1999, 5, 239–244. (In Japanese) [Google Scholar]
- Arakaki, T.; Kuroda, H.; Arima, F.; Inoue, Y.; Baba, K. Development of seismic devices applied to ball screw: Part 2 Performance test and evaluation of RD-series. J. Technol. Des. 1999, 5, 265–270. (In Japanese) [Google Scholar]
- Soong, T. State-of-the-art review: Active structural control in civil engineering. Eng. Struct. 1988, 10, 74–84. [Google Scholar] [CrossRef]
- Ma, R.; Bi, K.; Hao, H. Inerter-based structural vibration control: A state-of-the-art review. Eng. Struct. 2021, 243, 112655. [Google Scholar] [CrossRef]
- Marian, L.; Giaralis, A. Optimal design of a novel tuned mass-damper–inerter (TMDI) passive vibration control configuration for stochastically support-excited structural systems. Probabilistic Eng. Mech. 2014, 38, 156–164. [Google Scholar] [CrossRef]
- Tiwari, N.D.; Gogoi, A.; Hazra, B.; Wang, Q. A shape memory alloy-tuned mass damper inerter system for passive control of linked-SDOF structural systems under seismic excitation. J. Sound Vib. 2021, 494, 115893. [Google Scholar] [CrossRef]
- Ruiz, R.; Taflanidis, A.A.; Giaralis, A.; Lopez-Garcia, D. Risk-informed optimization of the tuned mass-damper-inerter (TMDI) for the seismic protection of multi-story building structures. Eng. Struct. 2018, 177, 836–850. [Google Scholar] [CrossRef]
- Giaralis, A.; Taflanidis, A.A. Optimal tuned mass-damper-inerter (TMDI) design for seismically excited MDOF structures with model uncertainties based on reliability criteria. Struct. Control Health Monit. 2018, 25, e2082. [Google Scholar] [CrossRef]
- Pietrosanti, D.; De Angelis, M.; Basili, M. A generalized 2-DOF model for optimal design of MDOF structures controlled byTuned Mass Damper Inerter (TMDI). Int. J. Mech. Sci. 2020, 185, 105849. [Google Scholar] [CrossRef]
- Taflanidis, A.A.; Giaralis, A.; Patsialis, D. Multi-objective optimal design of inerter-based vibration absorbers for earthquake protection of multi-storey building structures. J. Frankl. Inst. 2019, 356, 7754–7784. [Google Scholar] [CrossRef]
- Giaralis, A.; Petrini, F. Wind-Induced Vibration Mitigation in Tall Buildings Using the Tuned Mass-Damper-Inerter. J. Struct. Eng. 2017, 143, 04017127. [Google Scholar] [CrossRef]
- Petrini, F.; Giaralis, A.; Wang, Z. Optimal tuned mass-damper-inerter (TMDI) design in wind-excited tall buildings for occupants’ comfort serviceability performance and energy harvesting. Eng. Struct. 2020, 204, 109904. [Google Scholar] [CrossRef]
- Xu, K.; Bi, K.; Han, Q.; Li, X.; Du, X. Using tuned mass damper inerter to mitigate vortex-induced vibration of long-span bridges: Analytical study. Eng. Struct. 2019, 182, 101–111. [Google Scholar] [CrossRef]
- Dai, J.; Xu, Z.D.; Gai, P.P. Tuned mass-damper-inerter control of wind-induced vibration of flexible structures based on inerter location. Eng. Struct. 2019, 199, 109585.1–109585.15. [Google Scholar] [CrossRef]
- Dai, J.; Xu, Z.; Gai, P.; Hu, Z. Optimal design of tuned mass damper inerter with a Maxwell element for mitigating the vortex-induced vibration in bridges. Mech. Syst. Signal. Process. 2021, 148, 107180. [Google Scholar] [CrossRef]
- Zhang, Z.; Fitzgerald, B. Tuned mass damper inerter (TMDI) for suppressing edgewise vibrations of wind turbine blades. Eng. Struct. 2020, 221, 110928. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Mechanical Vibrations; Courier Corporation: North Chelmsford, MA, USA, 1985. [Google Scholar]
- Zhou, S.; Jean-Mistral, C.; Chesne, S. Influence of inerters on the vibration control effect of series double tuned mass dampers: Two layouts and analytical study. Struct. Control Health Monit. 2019, 26, e2414. [Google Scholar] [CrossRef]
- Wang, Z.; Giaralis, A. Enhanced motion control performance of the tuned mass damper inerter (TMDI) through primary structure shaping. Struct. Control. Health Monit. 2021, 28, e2756. [Google Scholar] [CrossRef]
- Kaveh, A.; Mahdavi, V.R. Colliding Bodies Optimization: A Novel Meta-Heuristic Method; Elsevier Ltd.: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Kaveh, A.; Fahimi Farzam, M.; Hojat Jalali, H.; Maroofiazar, R. Robust optimum design of a tuned mass damper inerter. Acta Mech. 2020, 231, 3871–3896. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H.; Chen, S.; Zhu, D. Optimization and sensitivity of TMD parameters for mitigating bridge maximum vibration response under moving forces—ScienceDirect. Structures 2020, 28, 512–520. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Value | Parameters | Numerical Value | |
|---|---|---|---|---|
| Structure Number of shares/diameter (mm) | Aluminum | 48/2.85 | Outer diameter (mm) | 23.76 |
| Steel | 7/2.22 | Calculation of pull-off force (N) | 83,410 | |
| Calculated area | Aluminum | 306.21 | Modulus of elasticity (N/mm2) | 65,000 |
| Steel | 27.1 | Mass per unit length (kg/km) | 1058 | |
| Total | 333.31 | Length of test section (m) | 30.84 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Yang, Y.; Sun, Y.; Zhong, Y.; Zhou, L.; Li, S.; Wu, C. Tuned-Mass-Damper-Inerter Performance Evaluation and Optimal Design for Transmission Line under Harmonic Excitation. Buildings 2022, 12, 435. https://doi.org/10.3390/buildings12040435
Liu X, Yang Y, Sun Y, Zhong Y, Zhou L, Li S, Wu C. Tuned-Mass-Damper-Inerter Performance Evaluation and Optimal Design for Transmission Line under Harmonic Excitation. Buildings. 2022; 12(4):435. https://doi.org/10.3390/buildings12040435
Chicago/Turabian StyleLiu, Xinpeng, Yingwen Yang, Yi Sun, Yongli Zhong, Lei Zhou, Siyuan Li, and Chaoyue Wu. 2022. "Tuned-Mass-Damper-Inerter Performance Evaluation and Optimal Design for Transmission Line under Harmonic Excitation" Buildings 12, no. 4: 435. https://doi.org/10.3390/buildings12040435