
Macromechanical Failure Criteria: Elasticity, Plasticity and Numerical Applications for the Non-Linear Masonry Modelling



Abstract
:1. Introduction
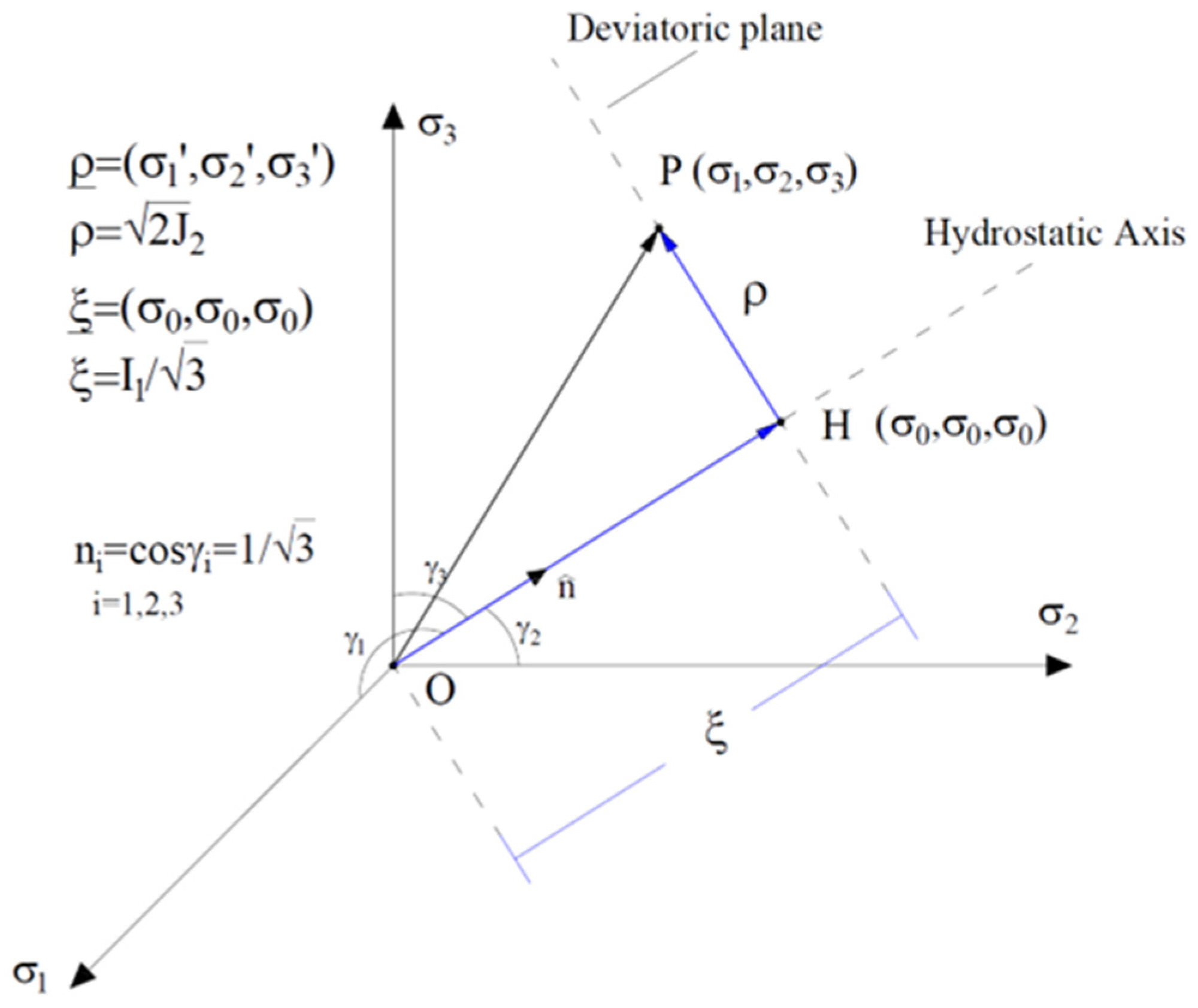
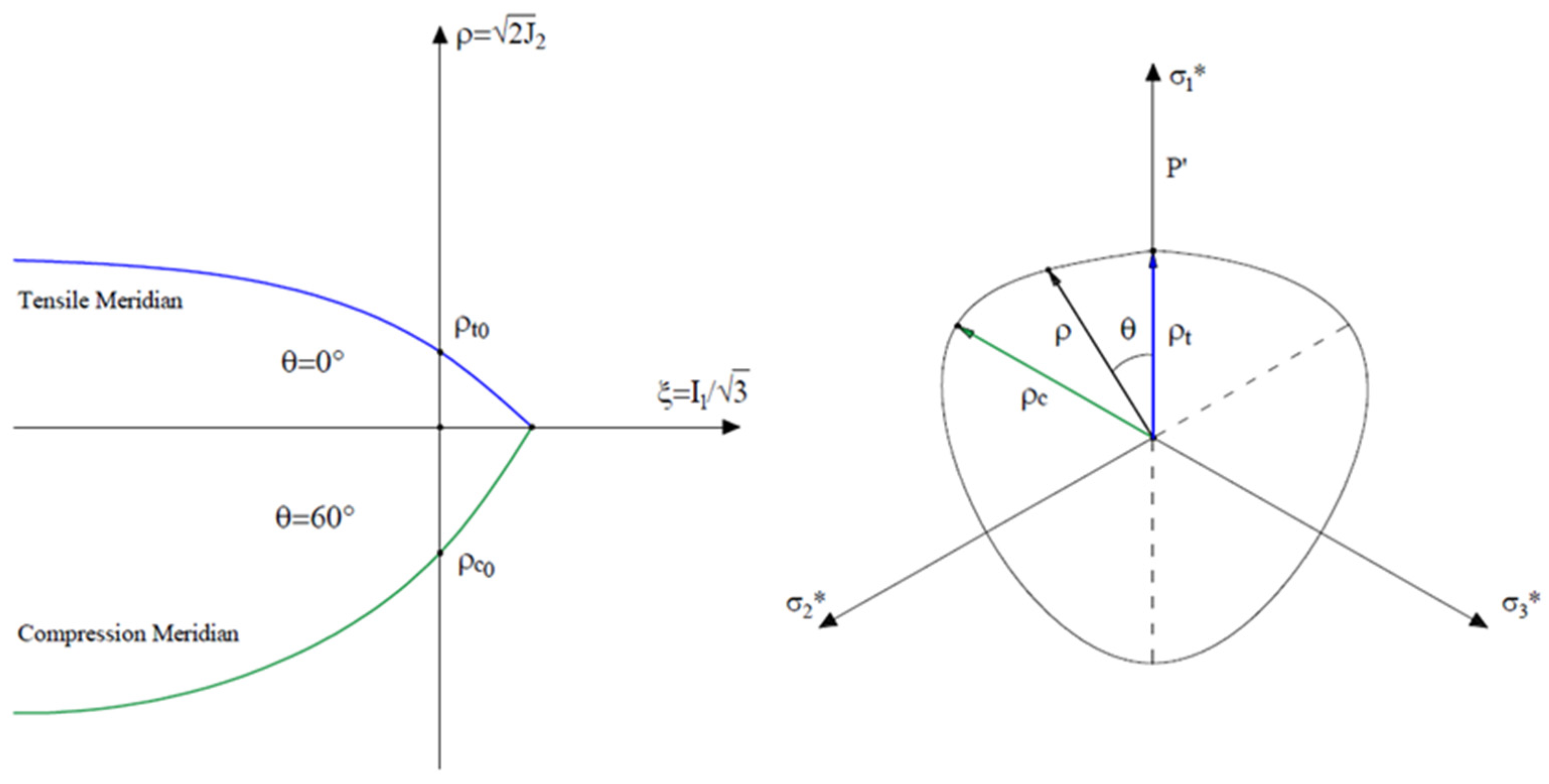
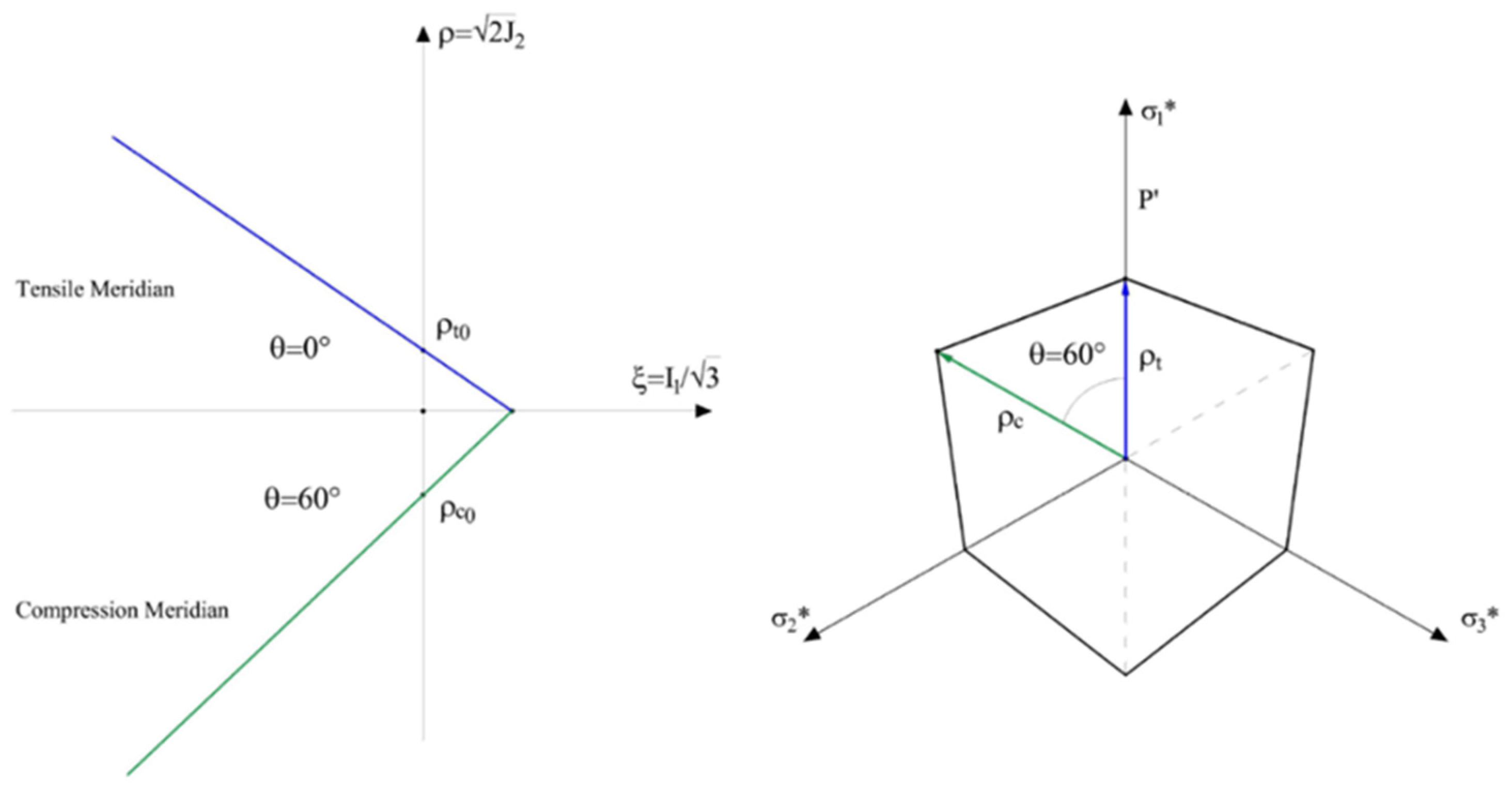
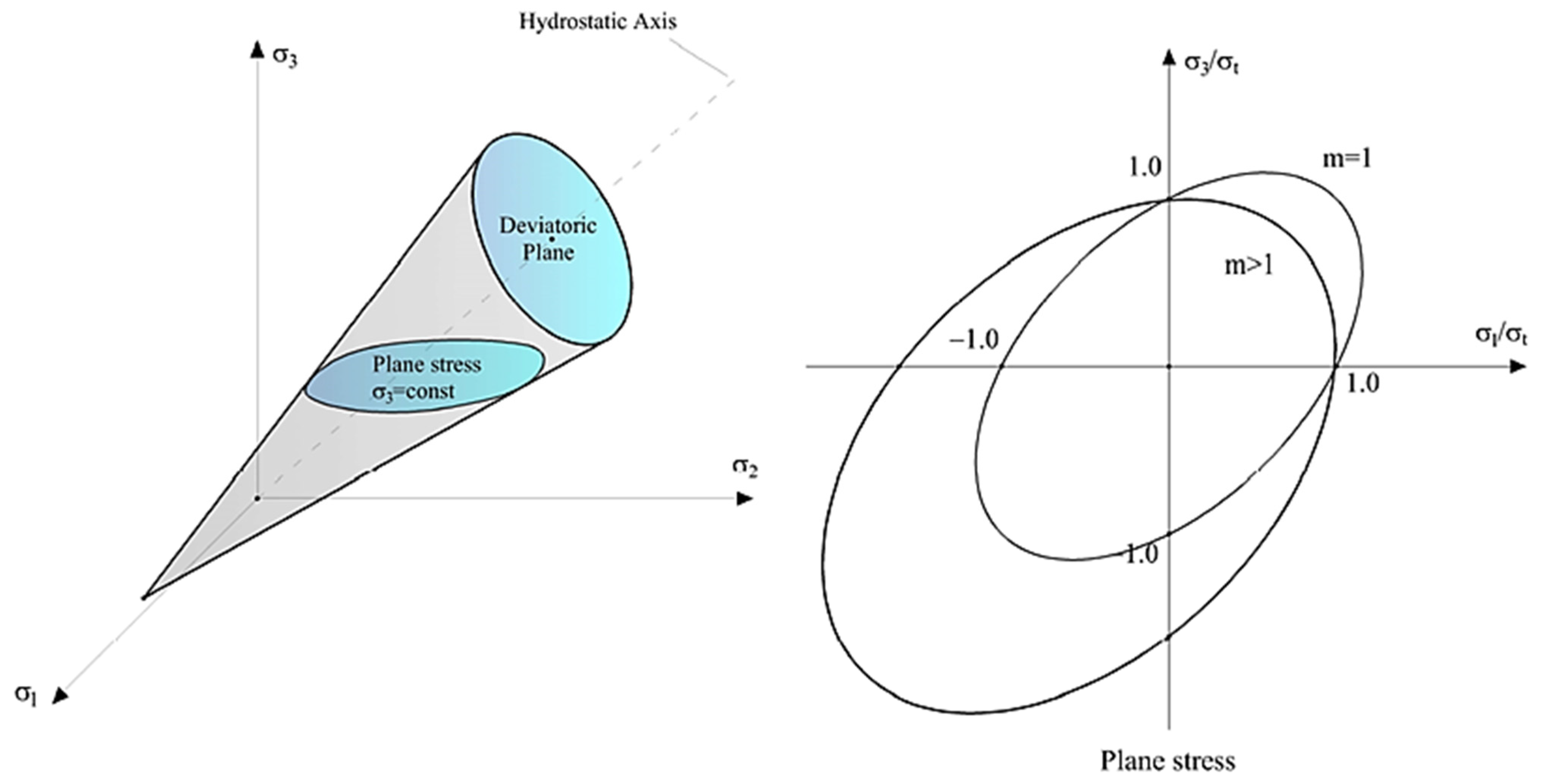
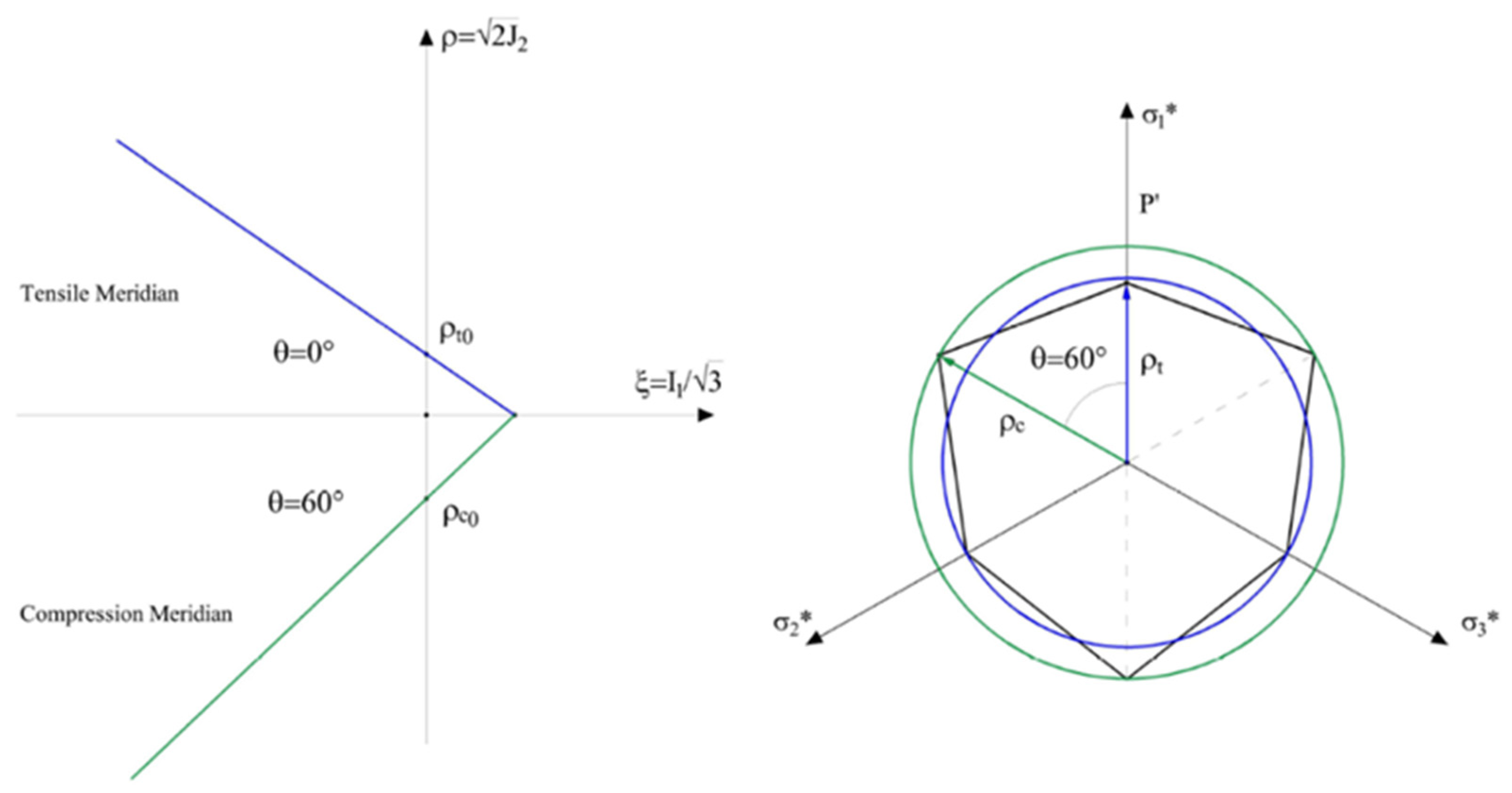
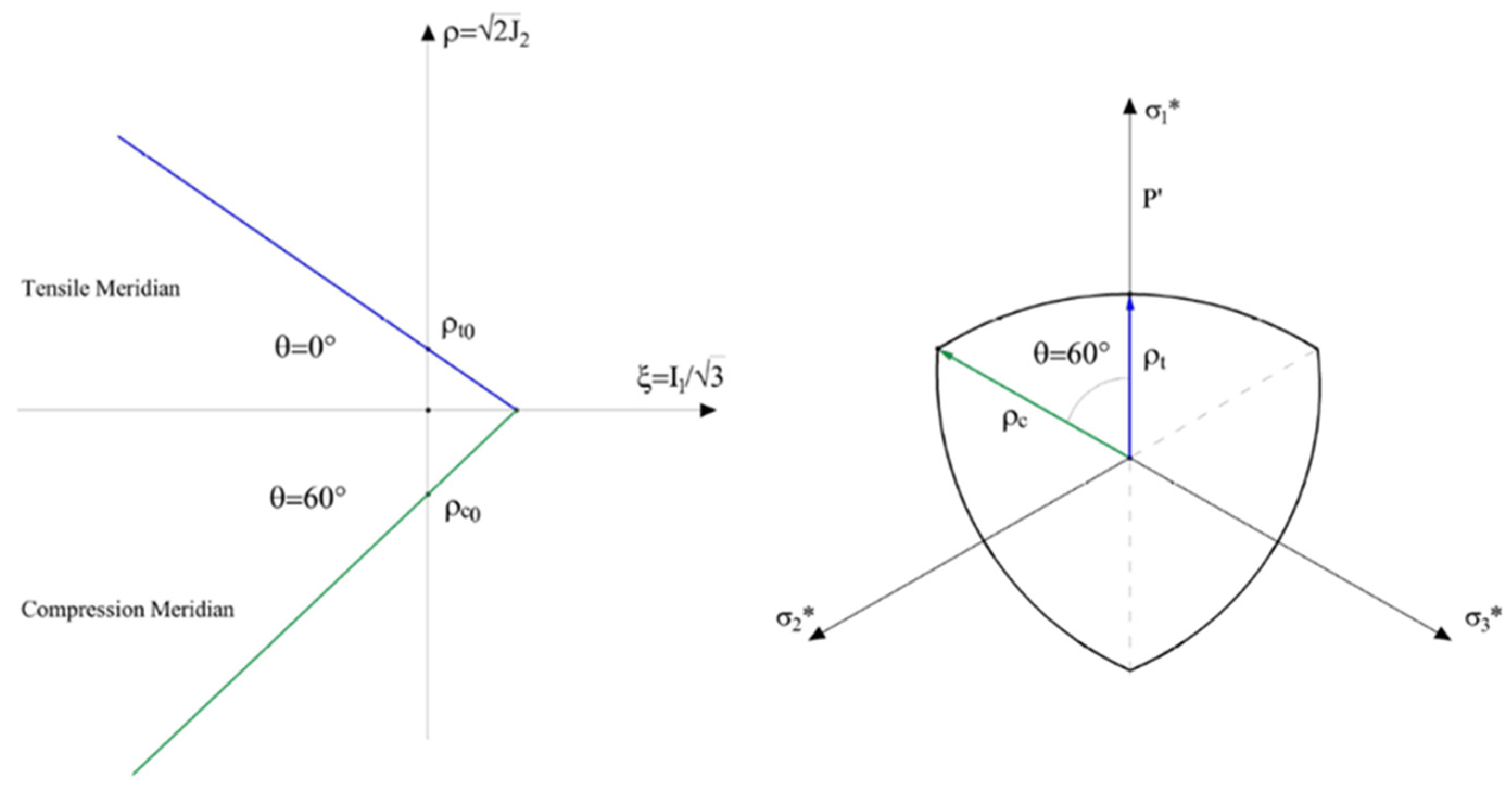
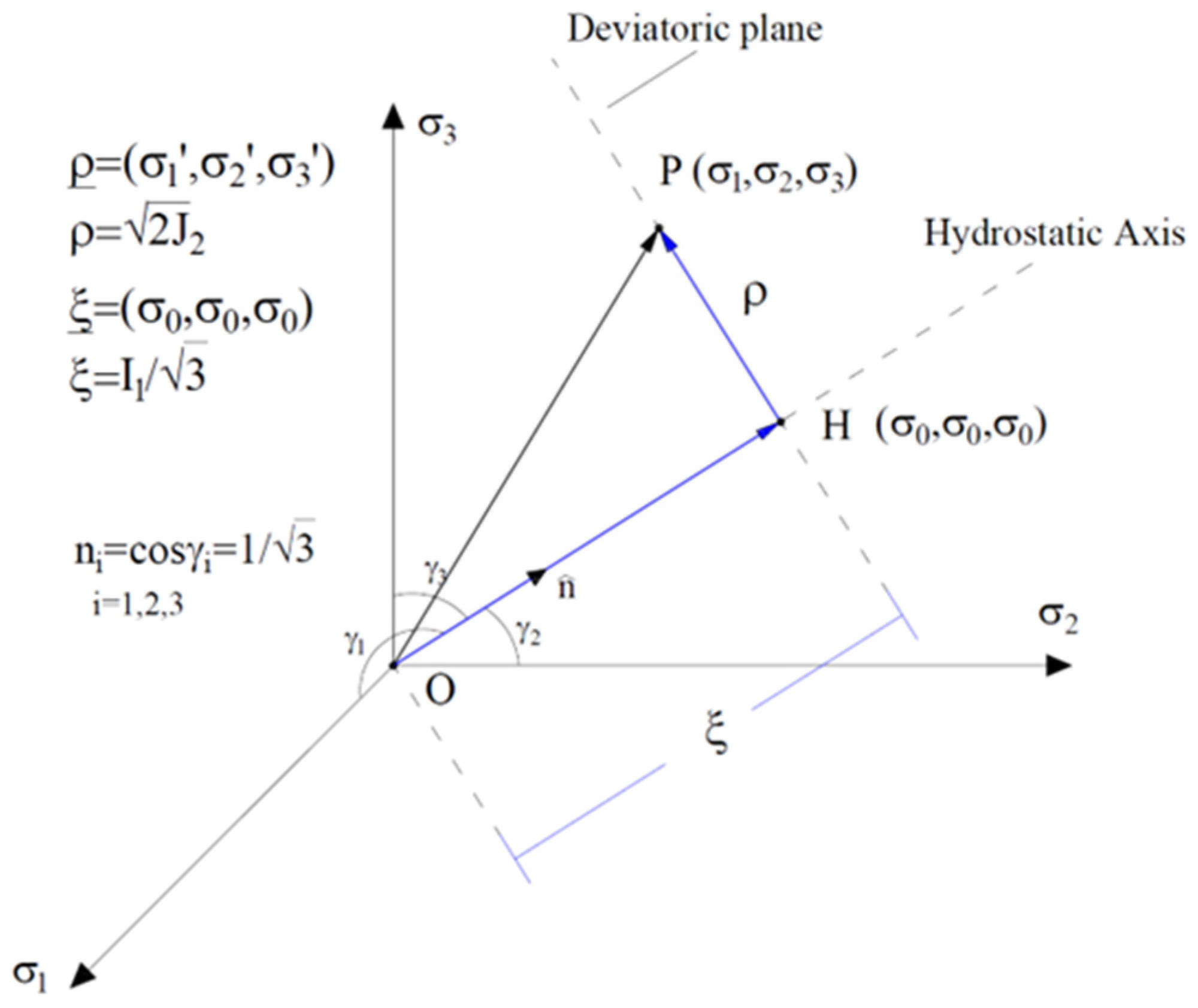
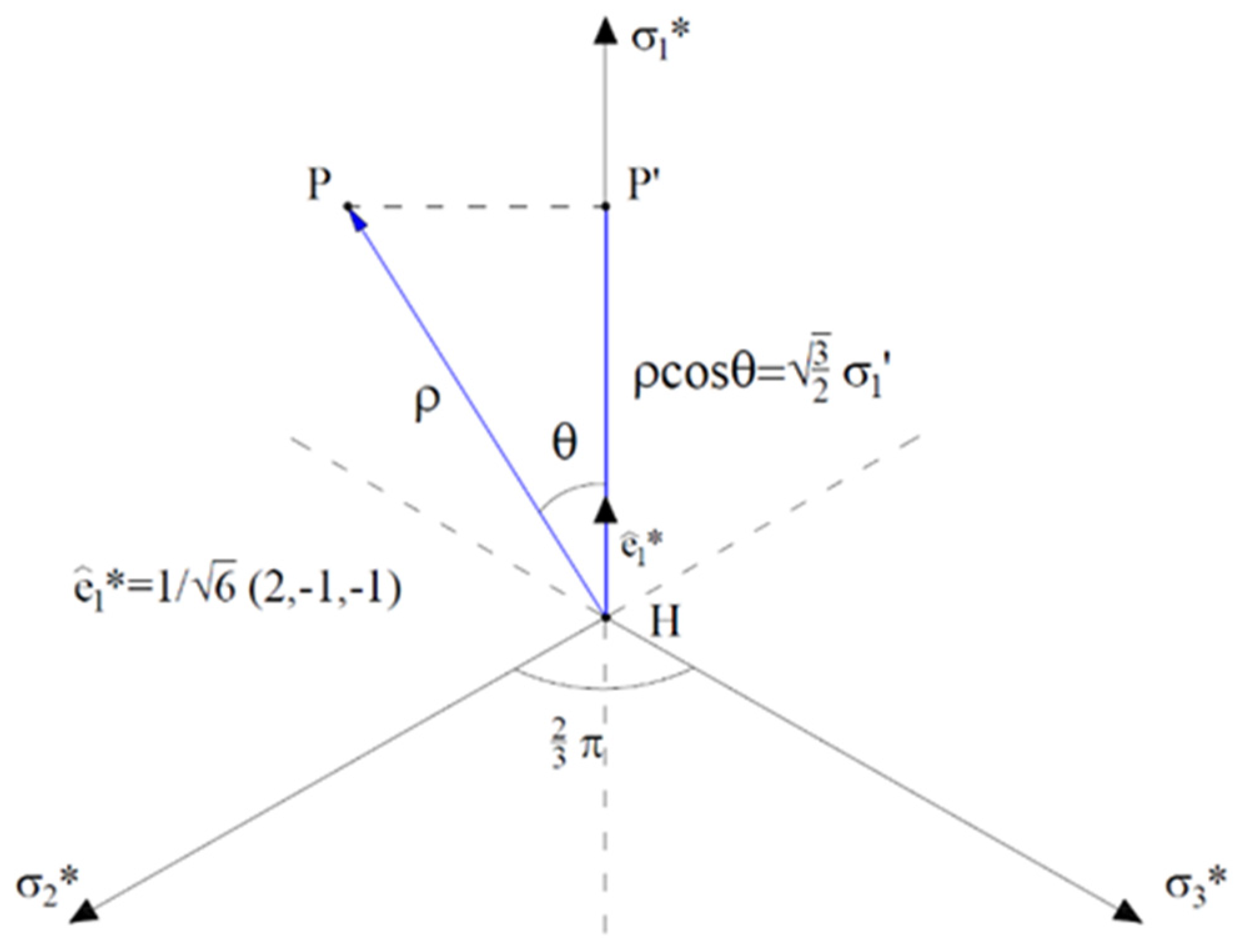
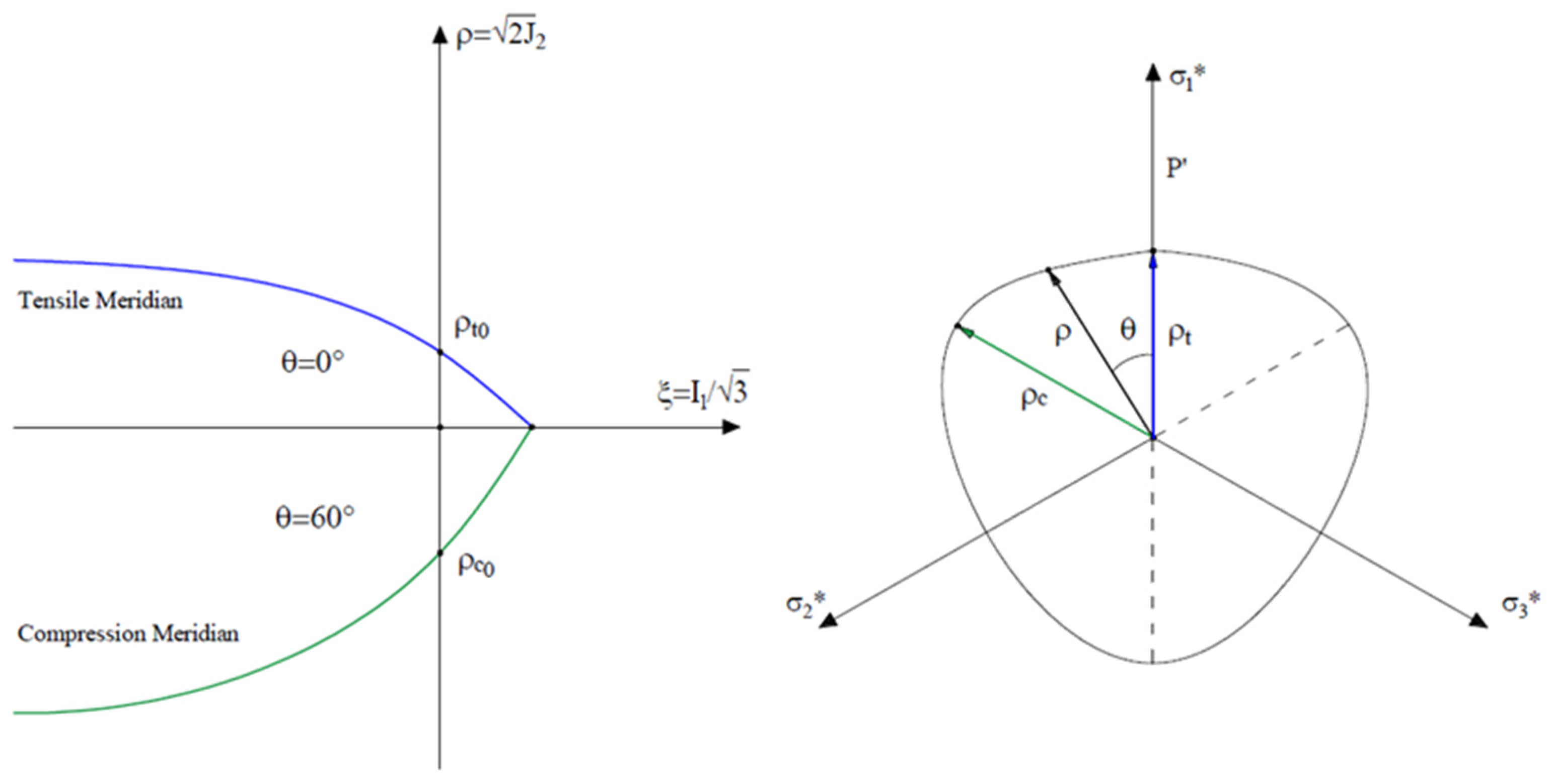
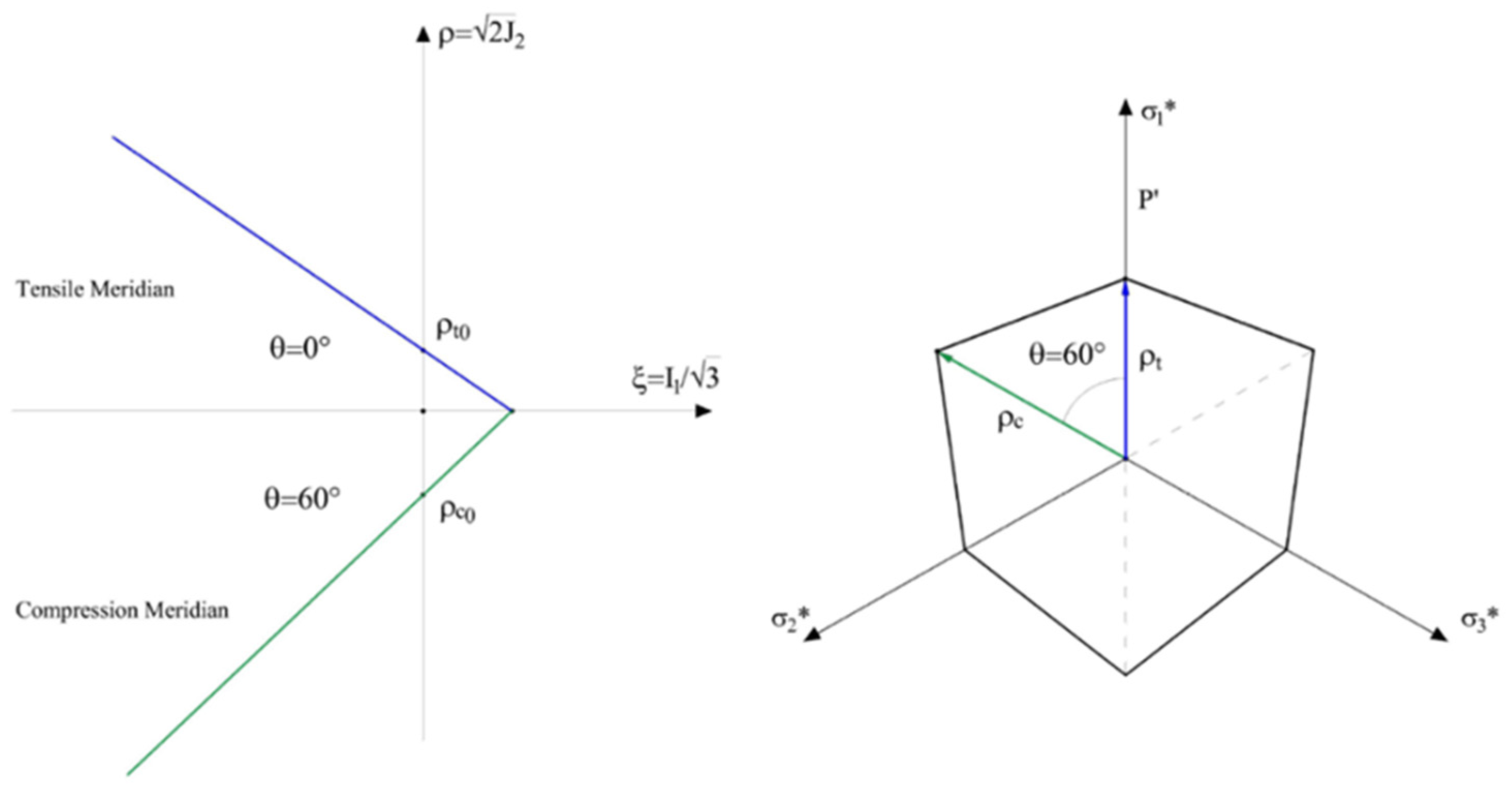
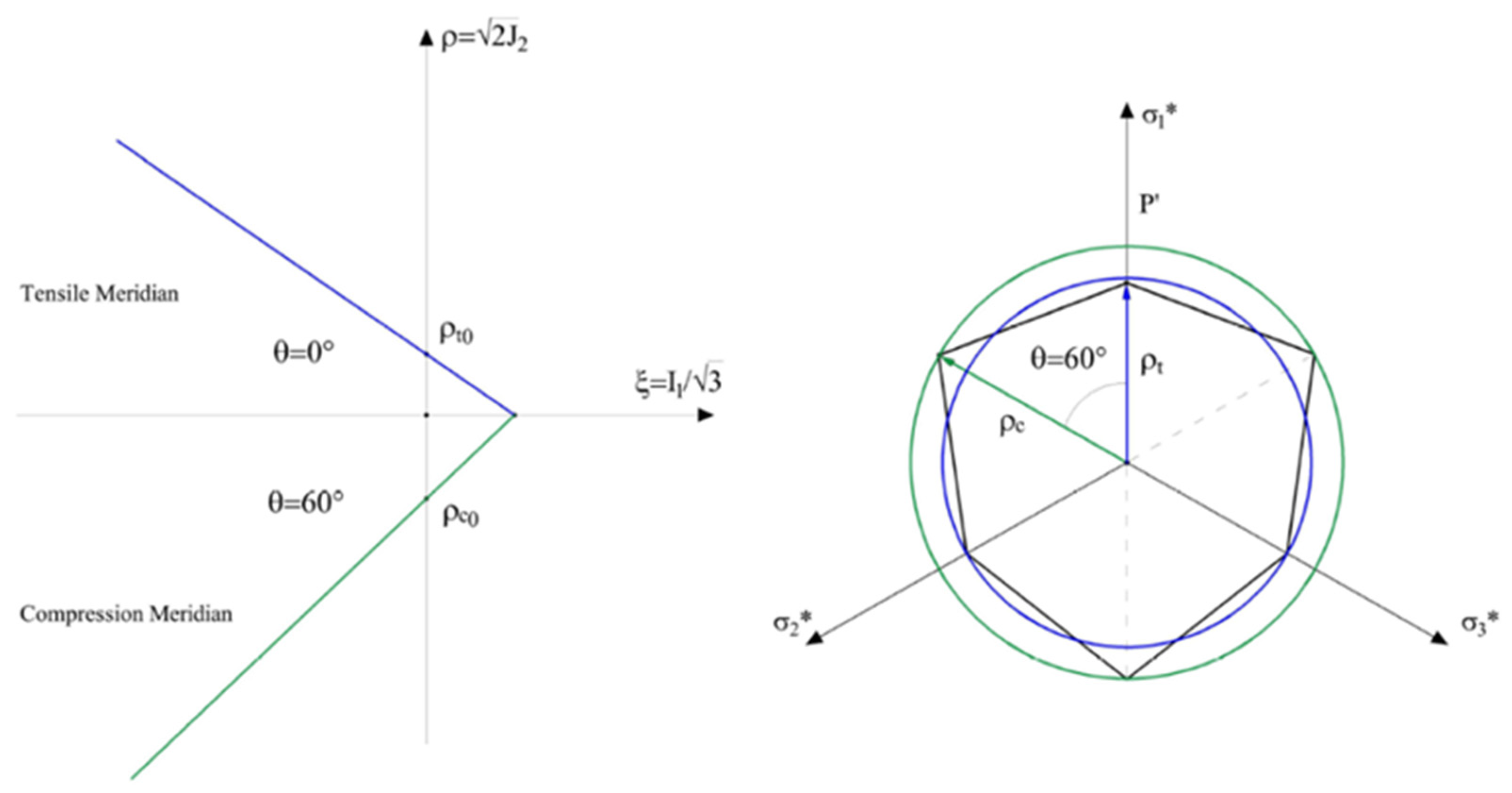
2. Meridian and Deviatoric Plane: Haigh-Westergaard Stress Space
3. Failure Criteria
3.1. Failure Criteria Independent of the Hydrostatic Pressure
3.2. Failure Criteria Dependent on the Hydrostatic Pressure
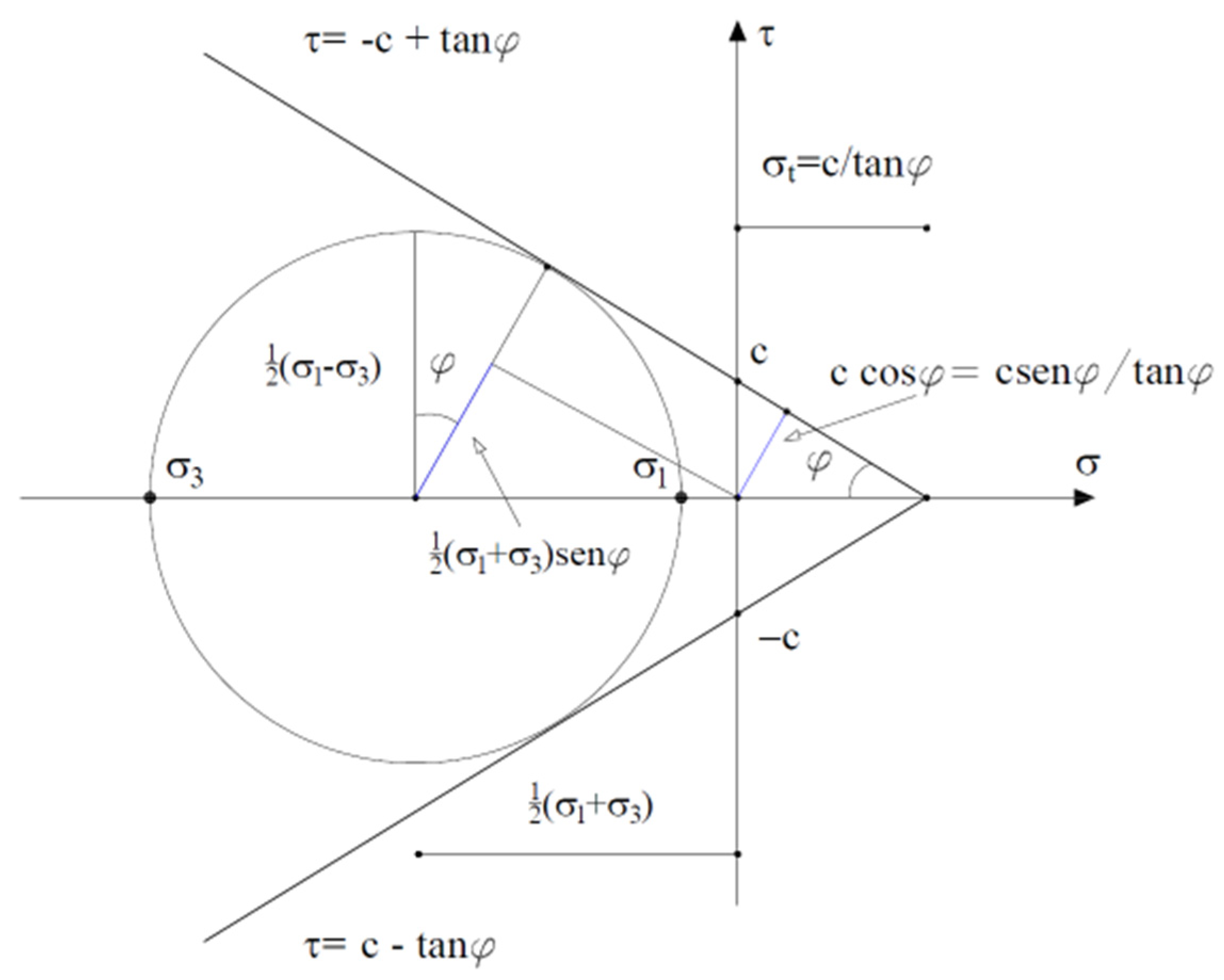
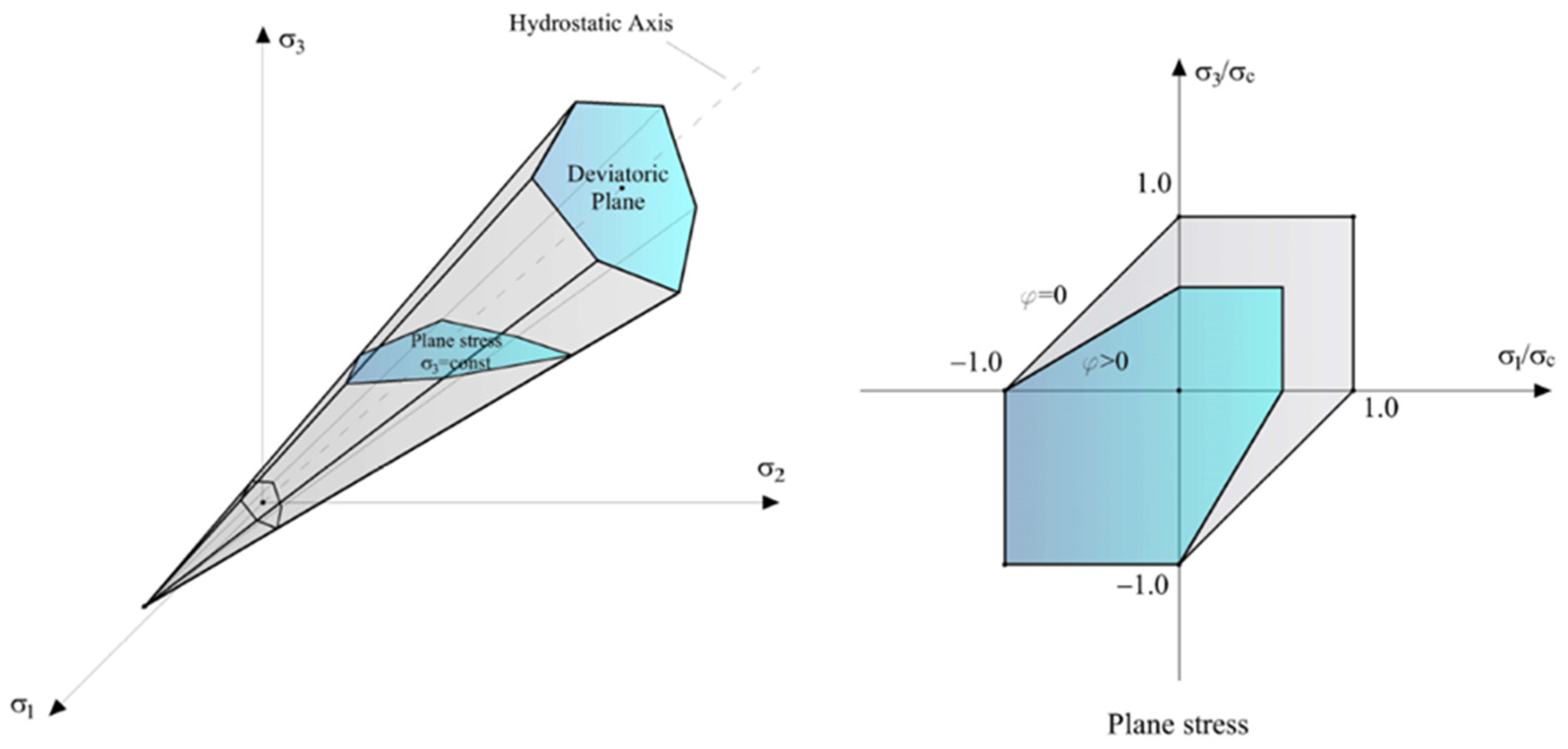
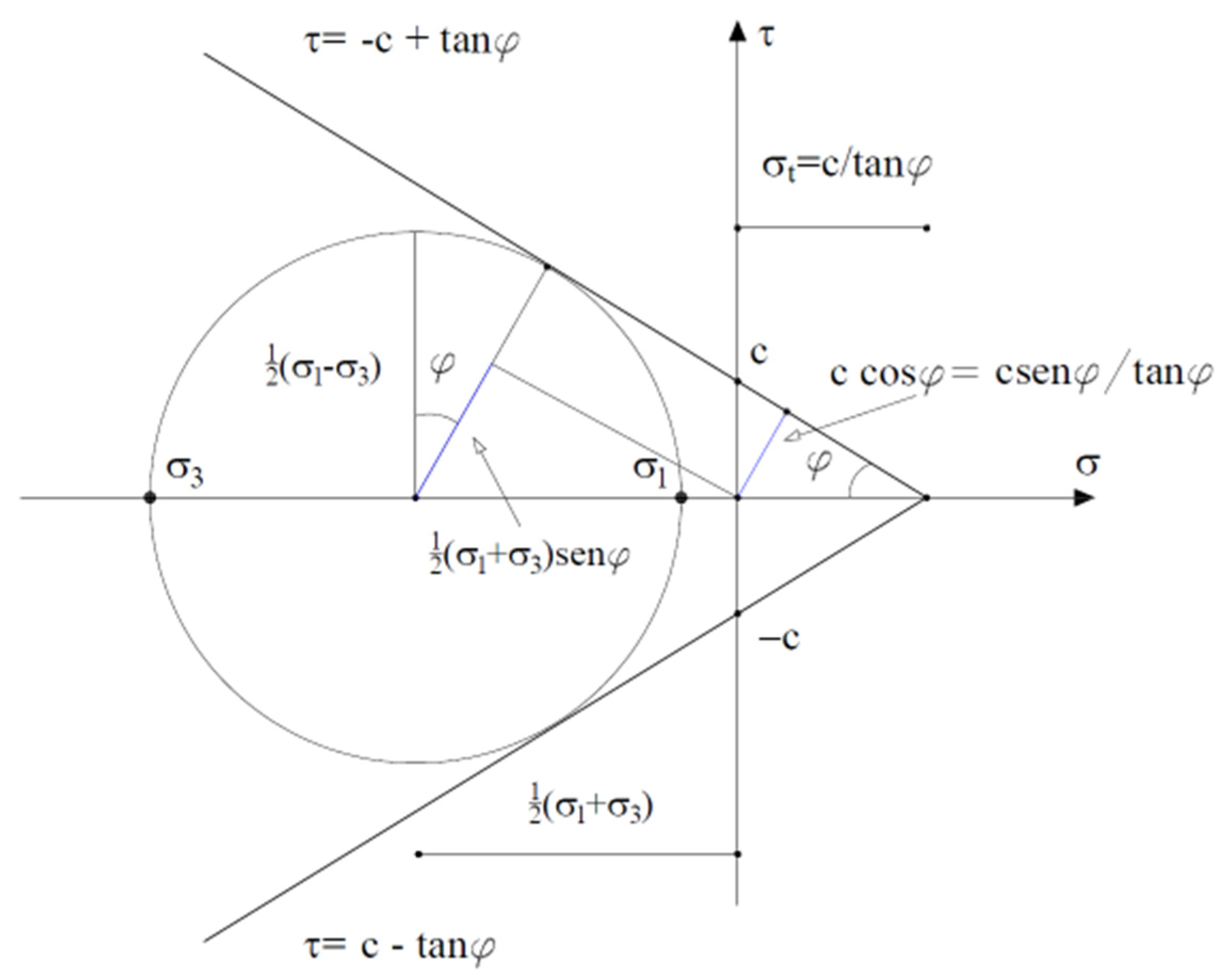
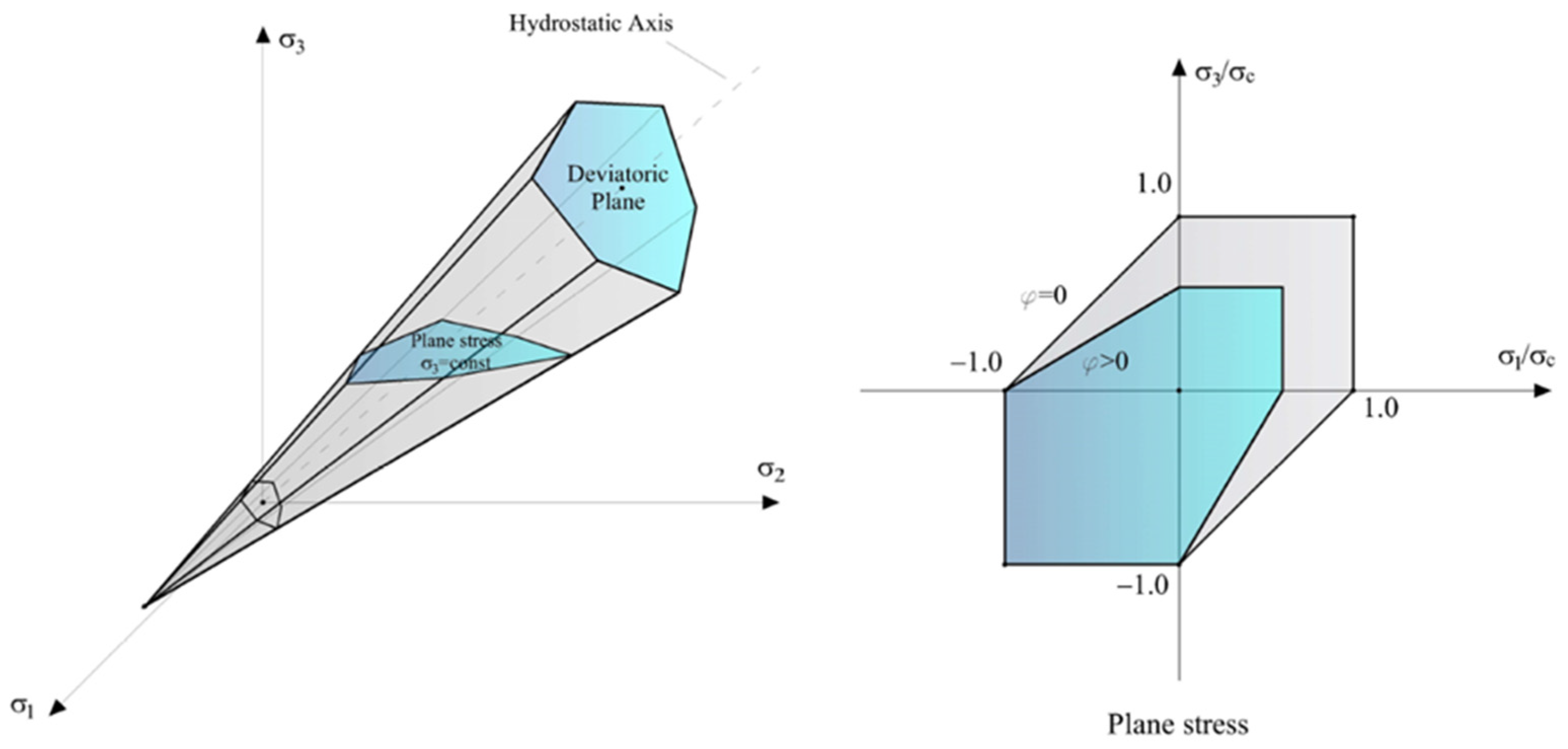
3.2.1. Mohr-Coulomb Failure Criterion
3.2.2. Drucker-Prager Failure Criterion
3.2.3. Calibration of Drucker-Prager Parameters according to Mohr-Coulomb Criterion
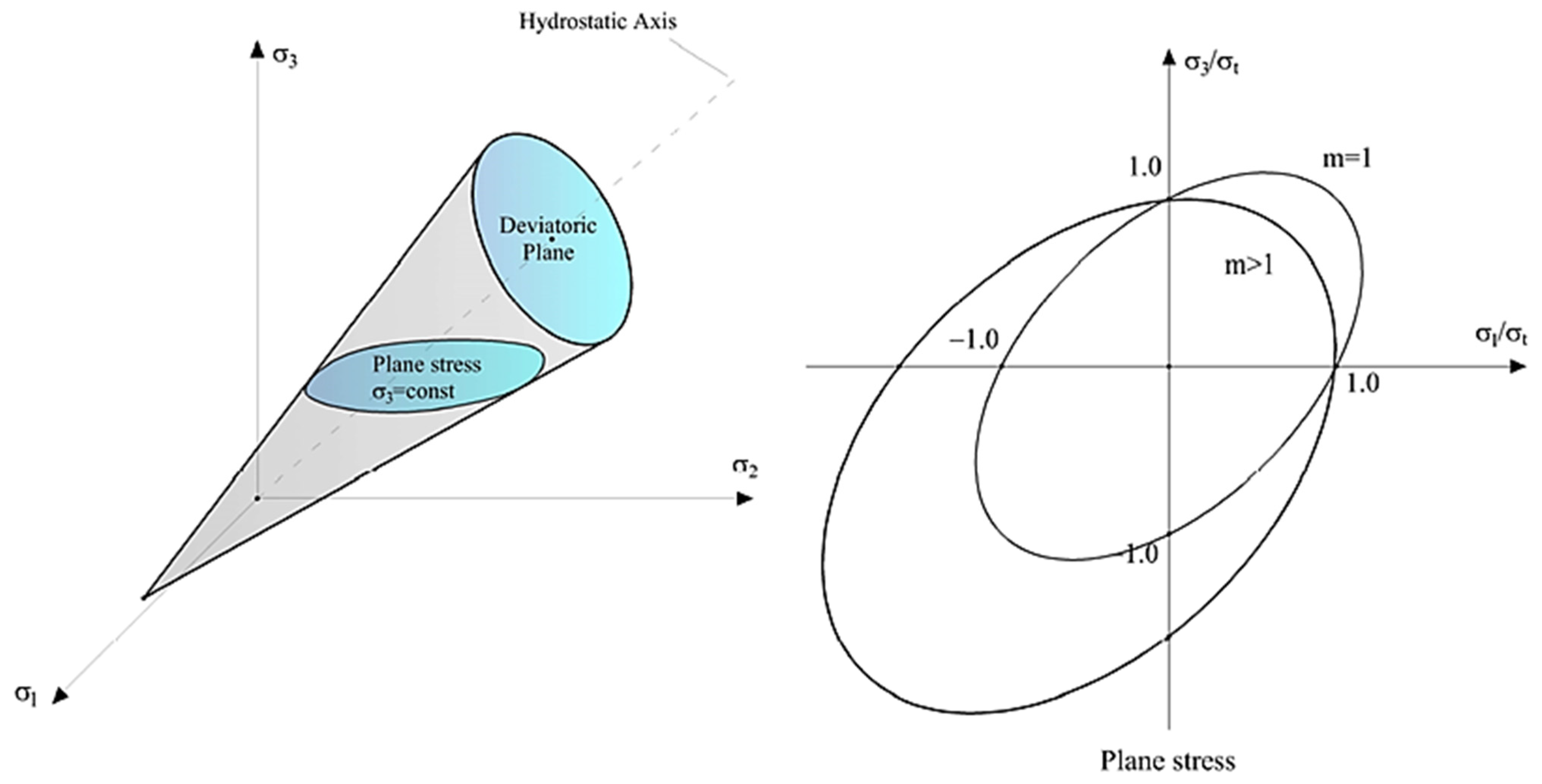
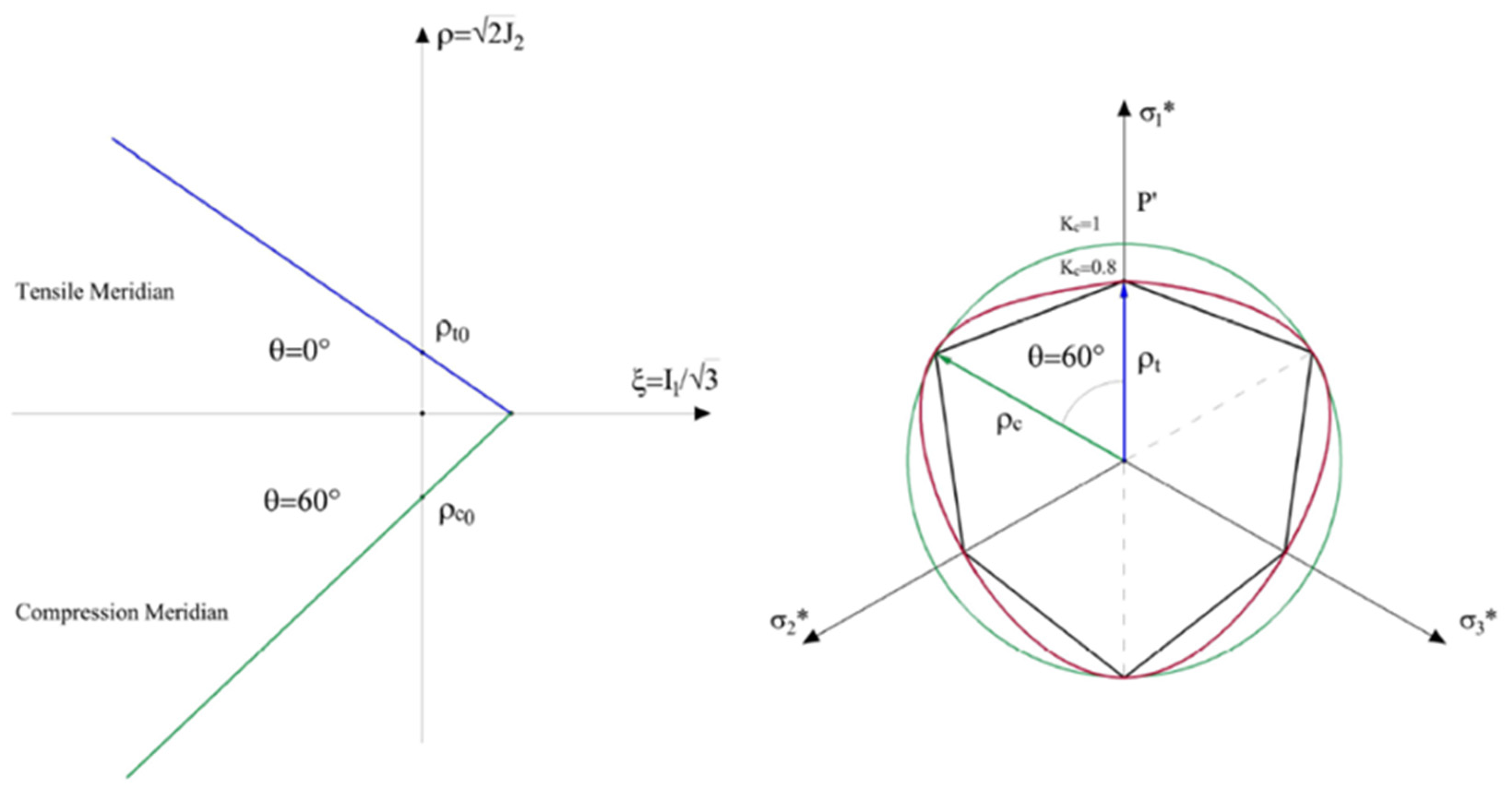
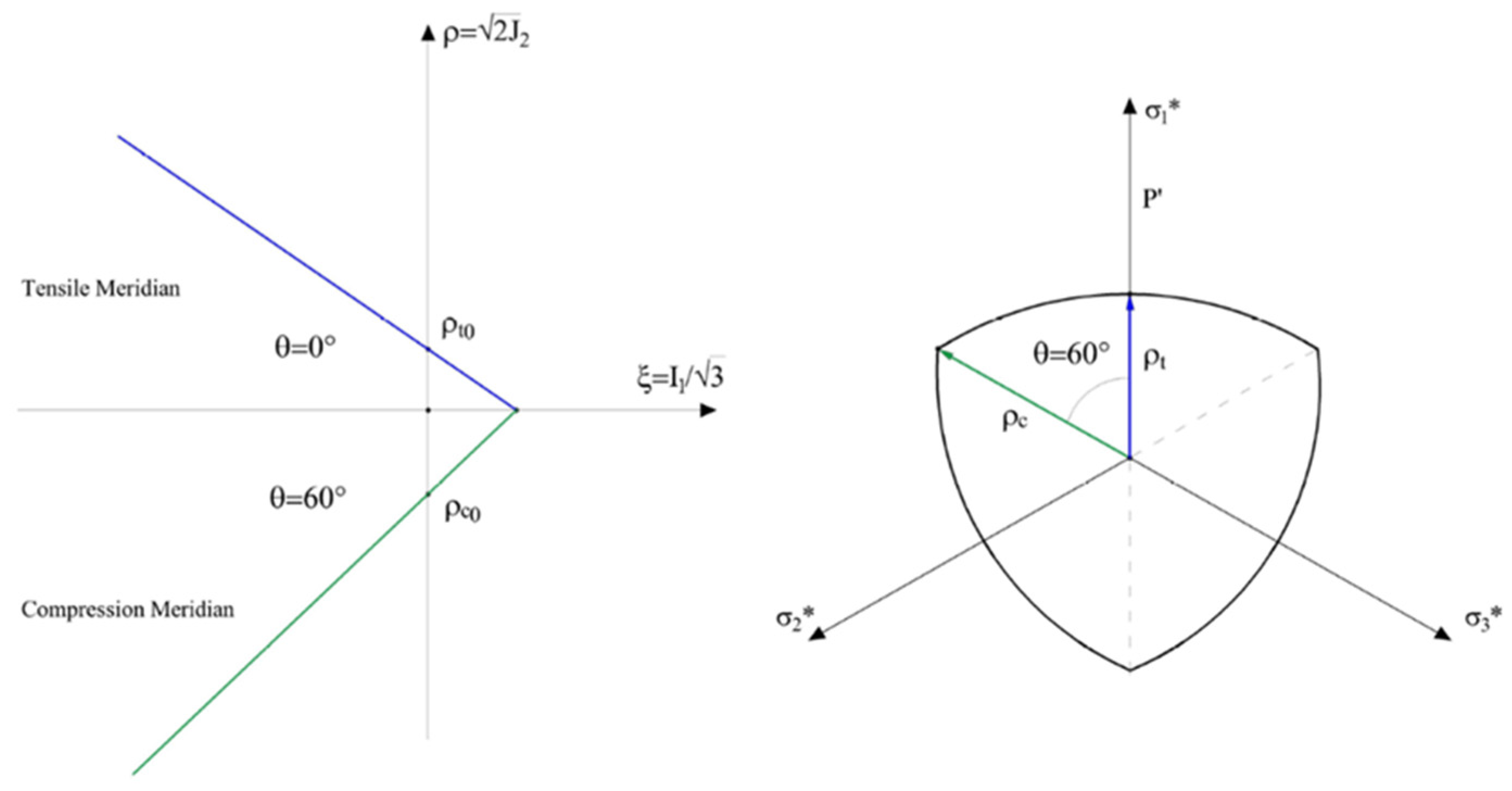
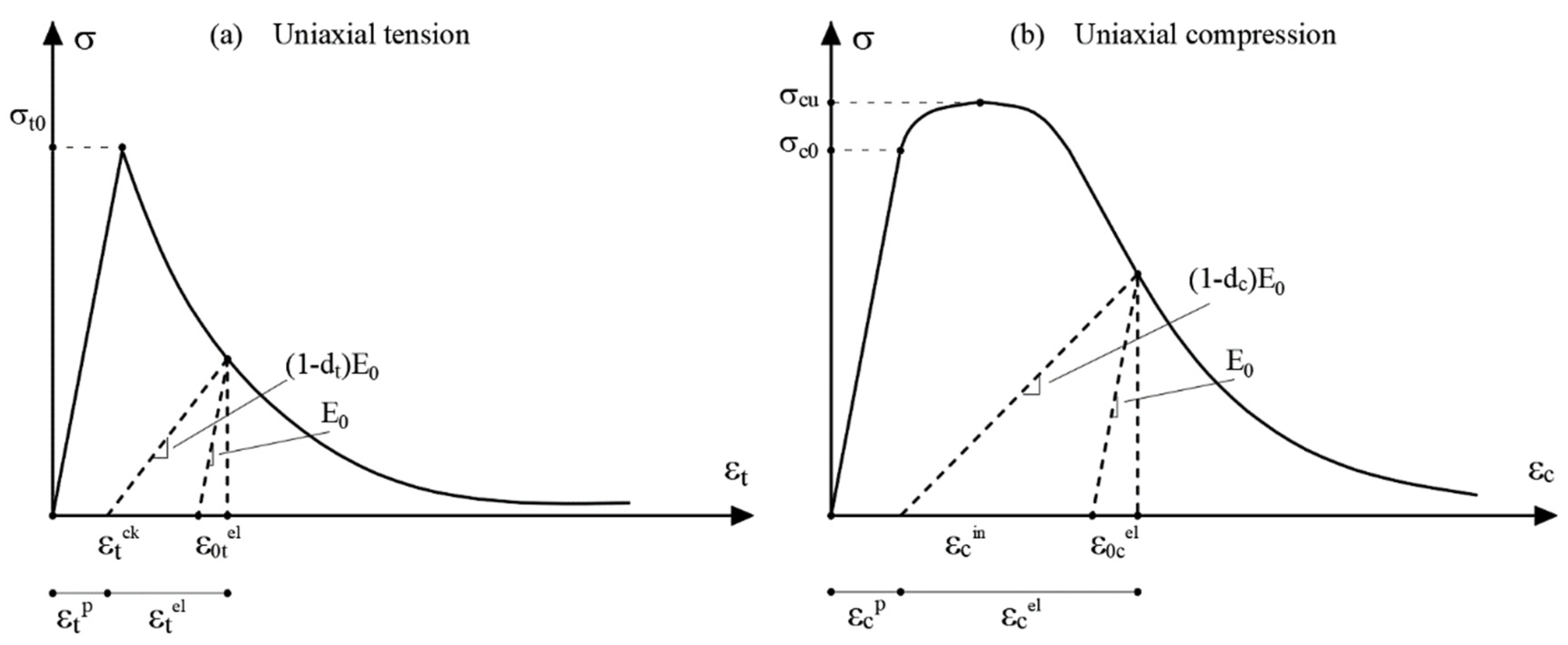
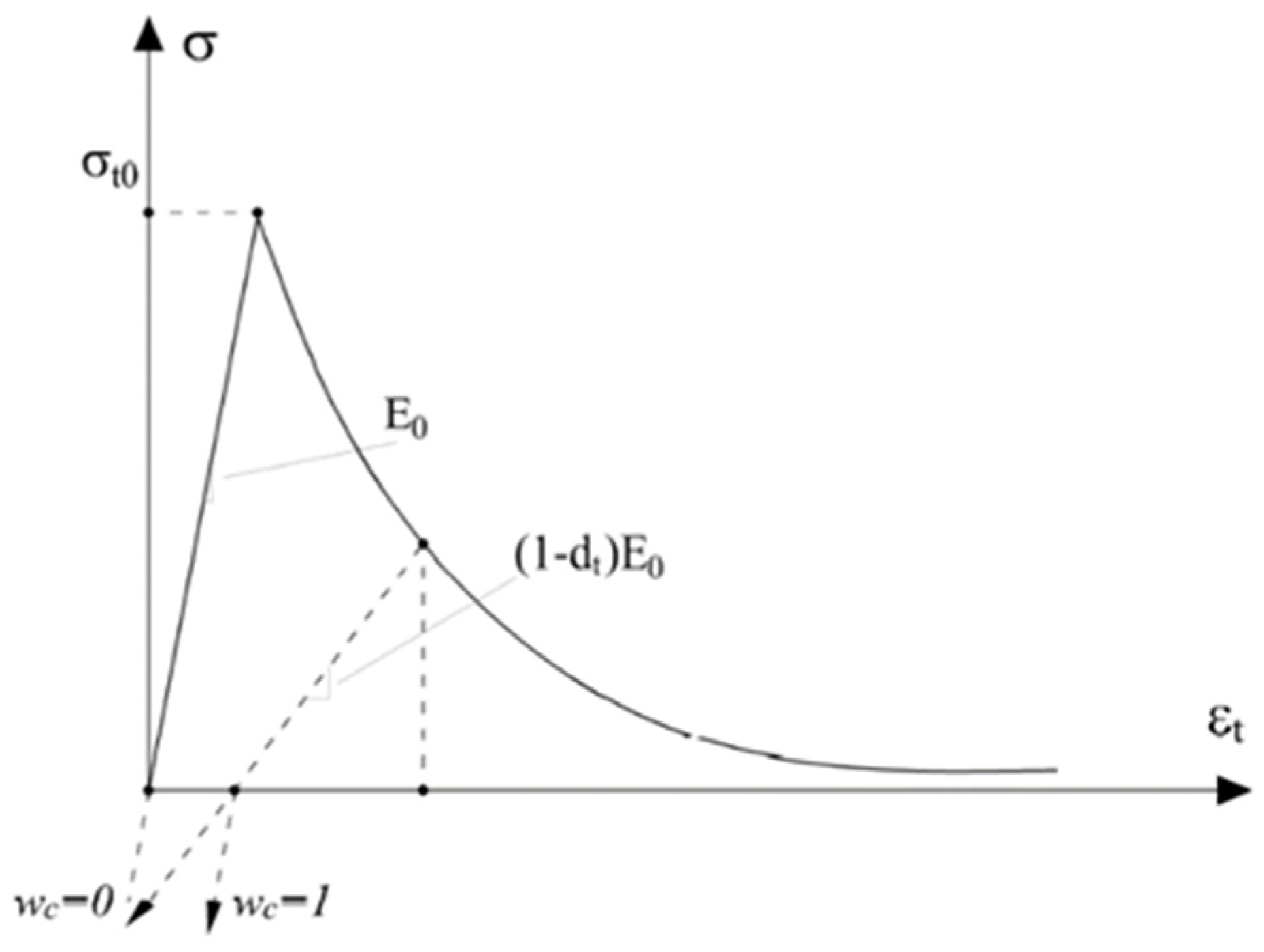
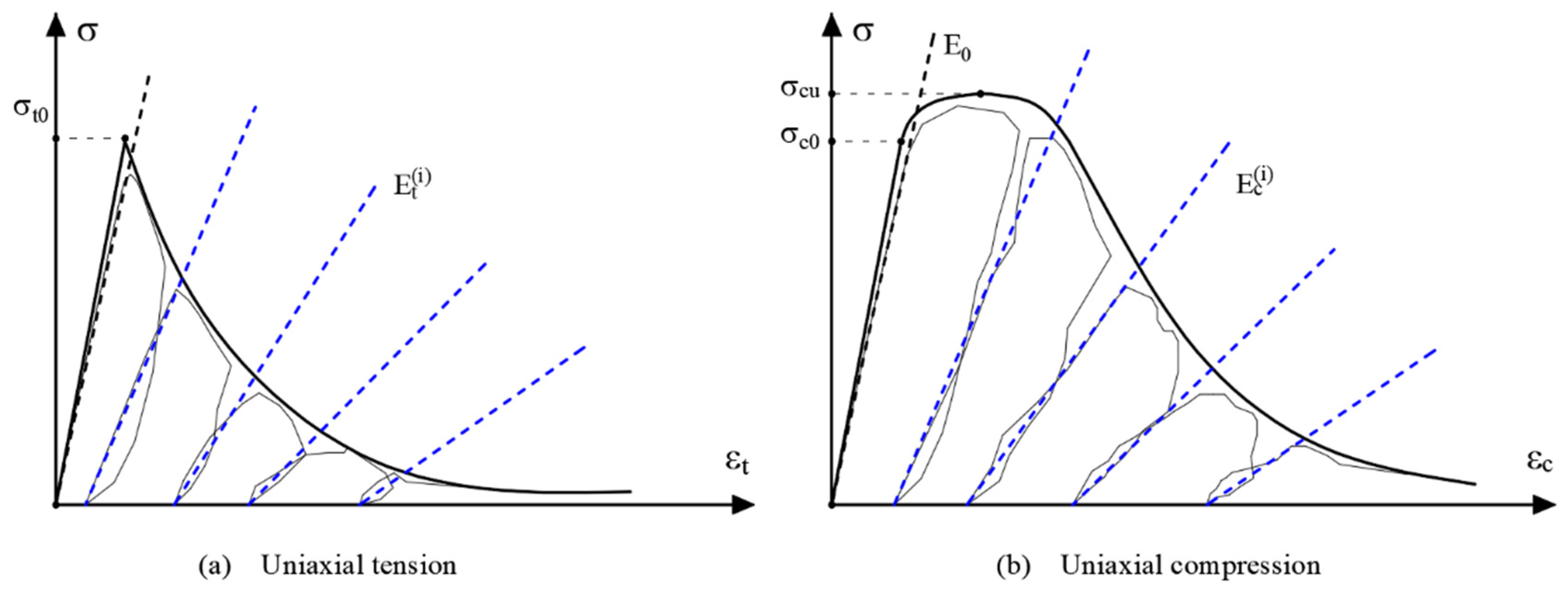
3.2.4. Concrete Damaged Plasticity Failure Criterion (CDP)
3.3. Yield Function, Flow Rule and Hardening Rule
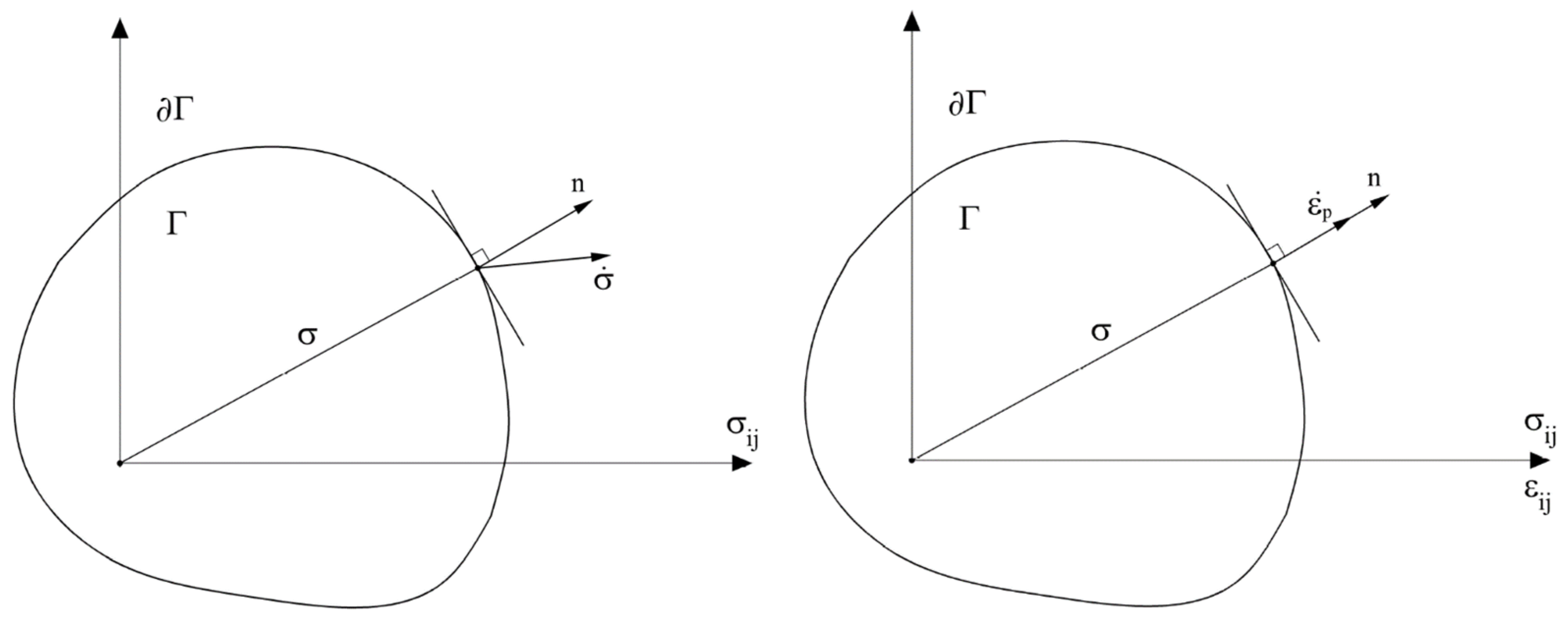
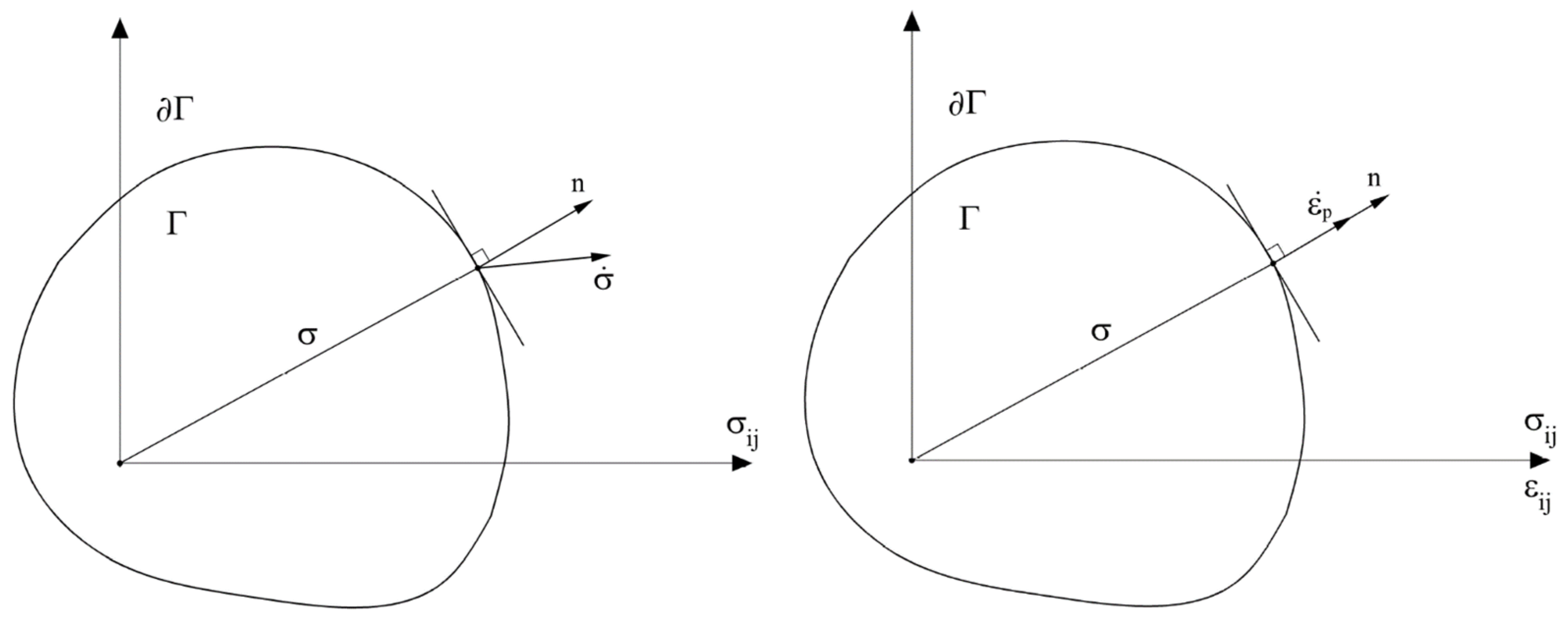
3.3.1. Flow Rule
3.3.2. Drucker Stability Postulate
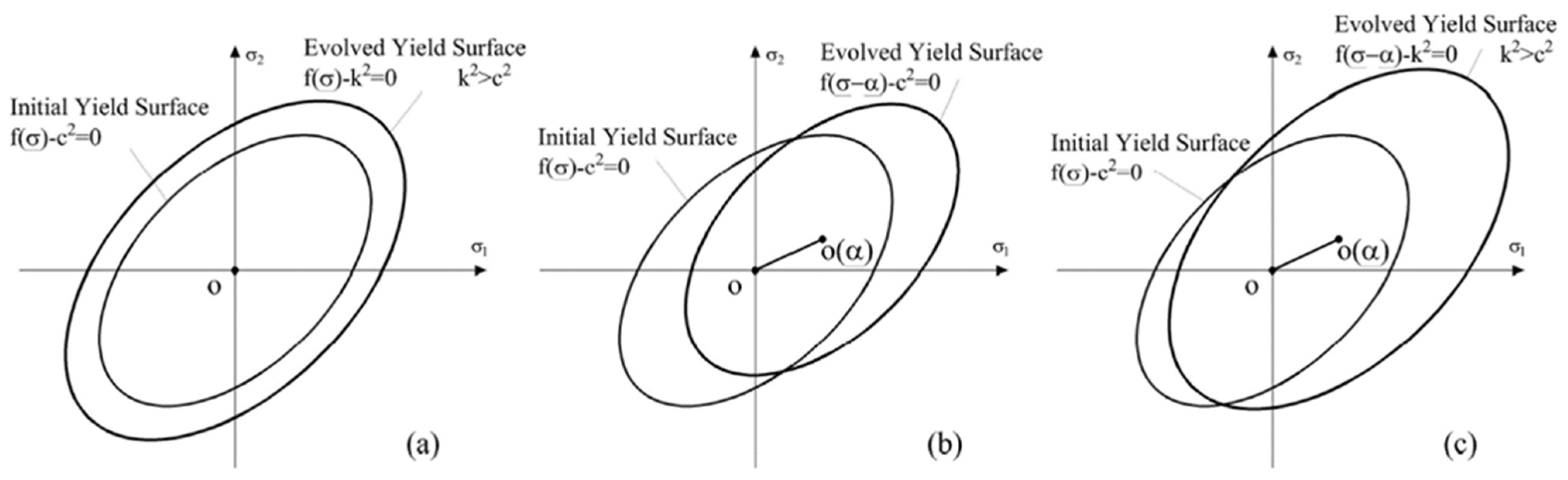
3.3.3. Hardening Rule
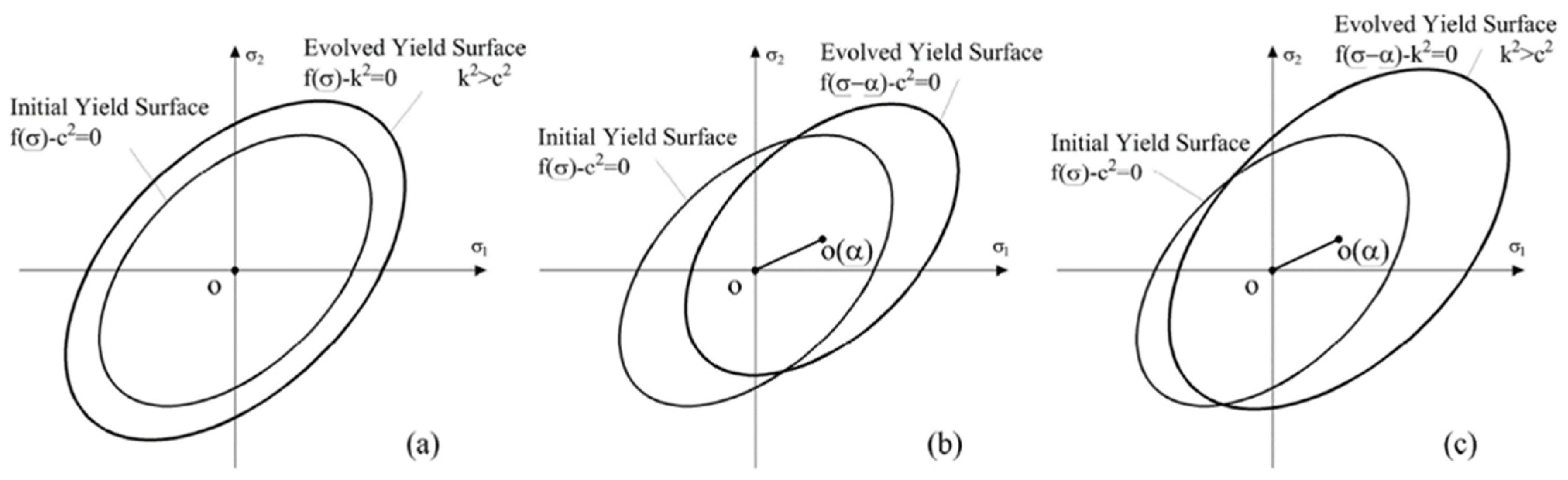
- Isotropic hardening: this is the simplest hardening rule and is based on the concept of homothetic expansion of the initial yield surface, without any kind of distortion or translation. The function is characterized by a single parameter k and takes the form:
- Kinematic hardening: in this case the surface translates into the space of tensions, keeping its shape, orientation and size rigid unchanged. The evolved domain is characterized by a variable center as a function of the plastic deformations:with c constant and defined through the Prager or Ziegler rule which determines these parameters as a function of the history of plastic deformation.
- Combined hardening: isotropic hardening is accepted in the case of proportional increasing actions; kinematic hardening is used when the Bauschinger effect prevails. In many cases, the behaviour turns out to be mixed and for this reason, a work hardening function has been defined that contemplates both the previously exposed types and can be written as:
3.3.4. Non-Associated Flow Rule
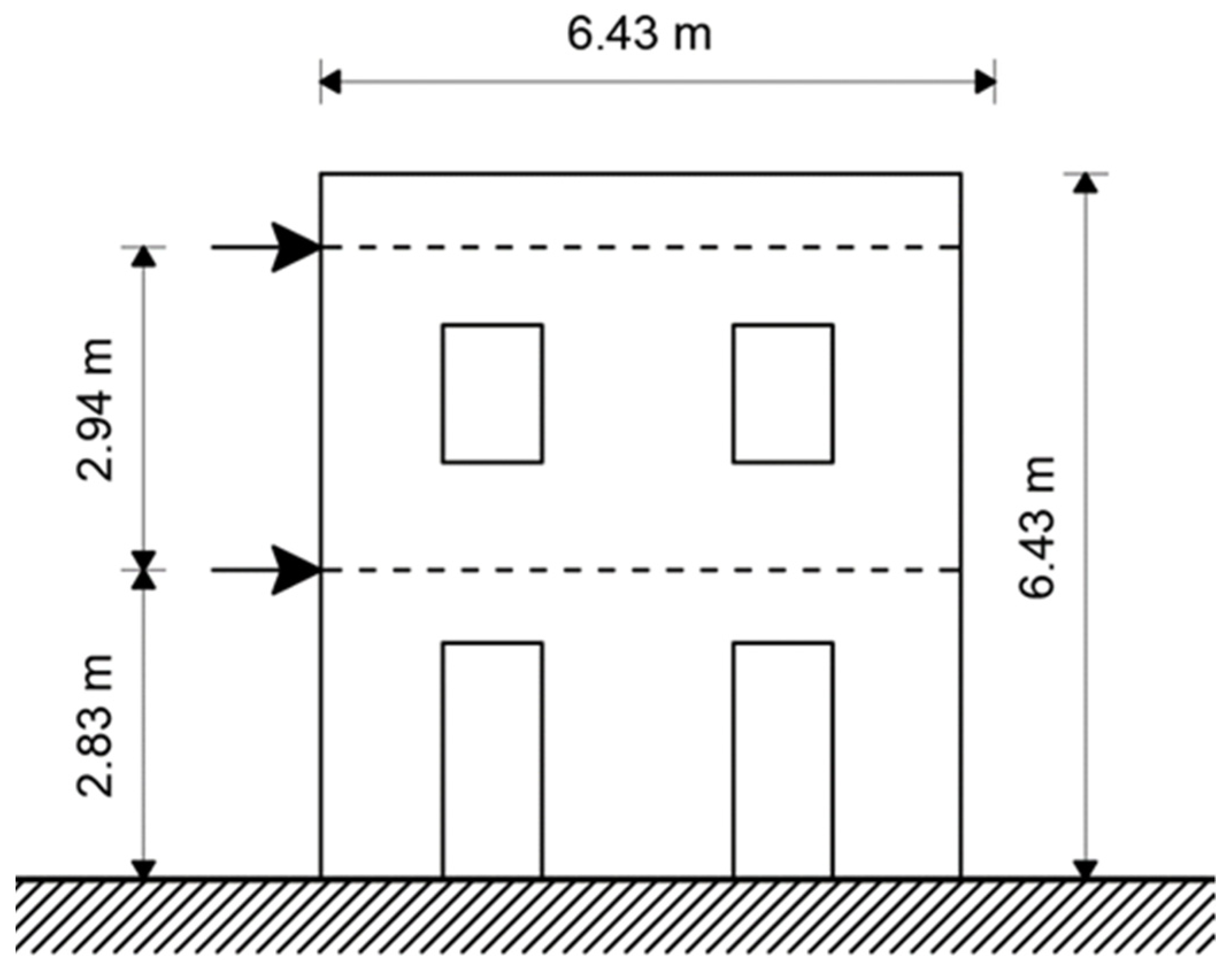
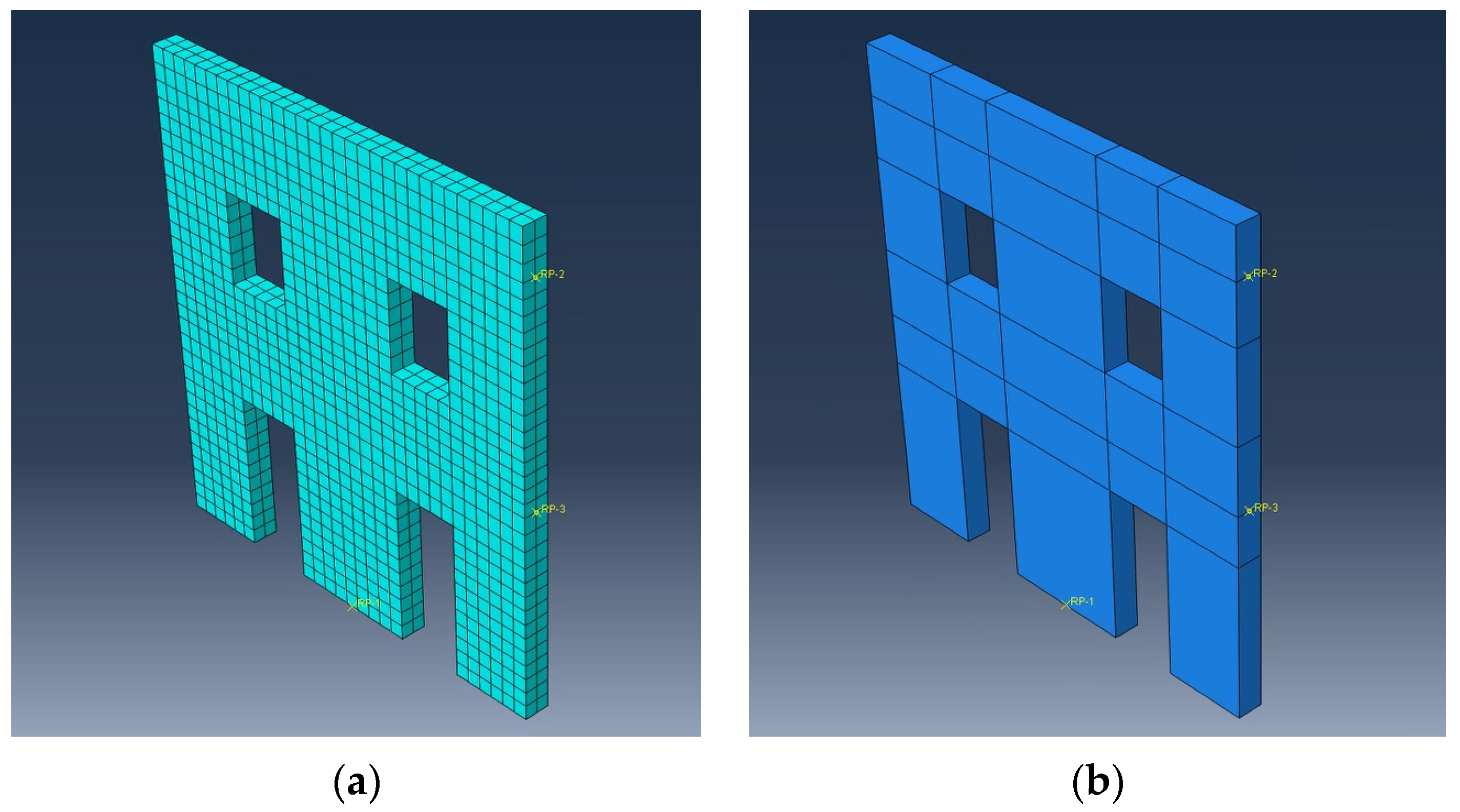
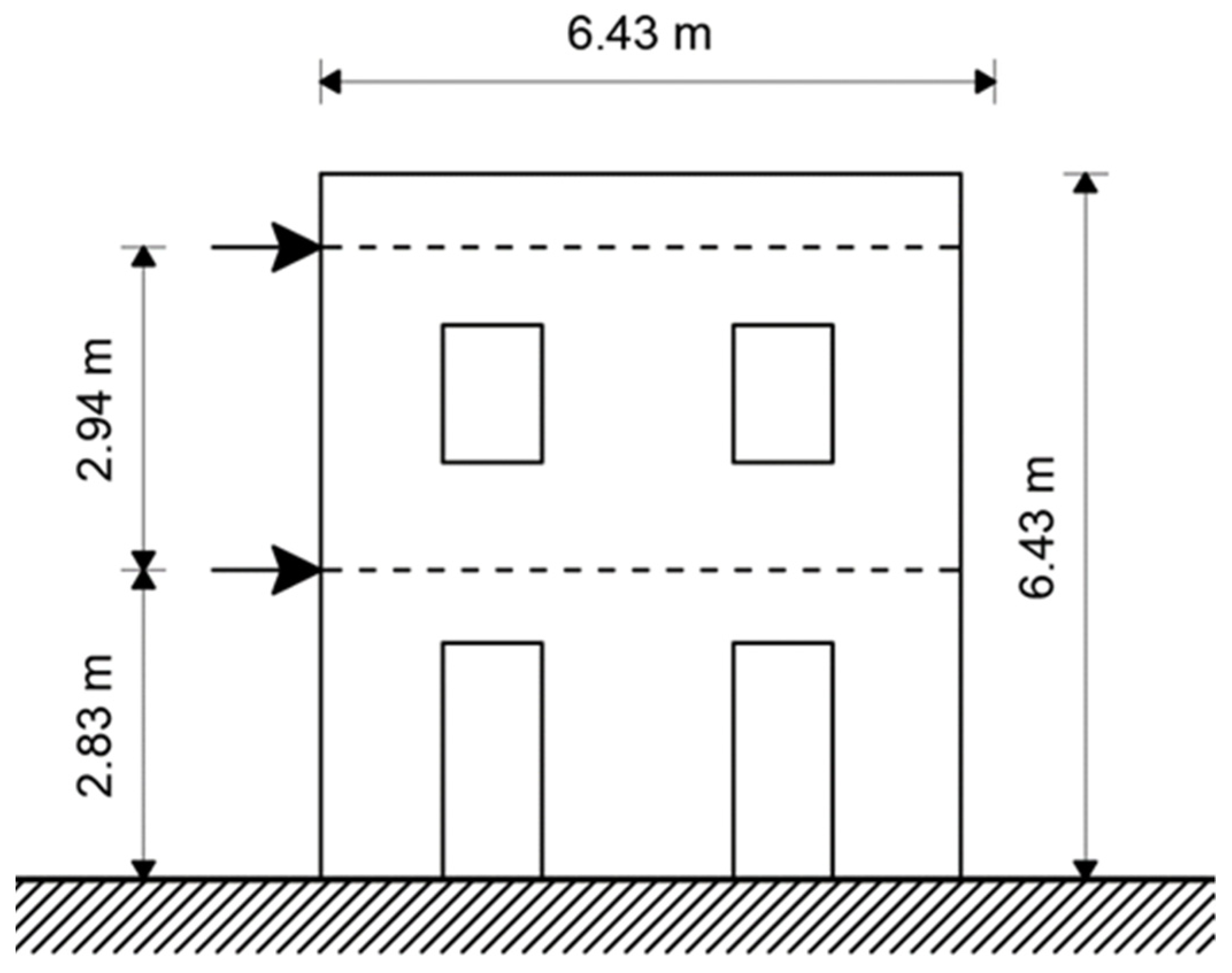
4. Case Study: Application to a Masonry Wall
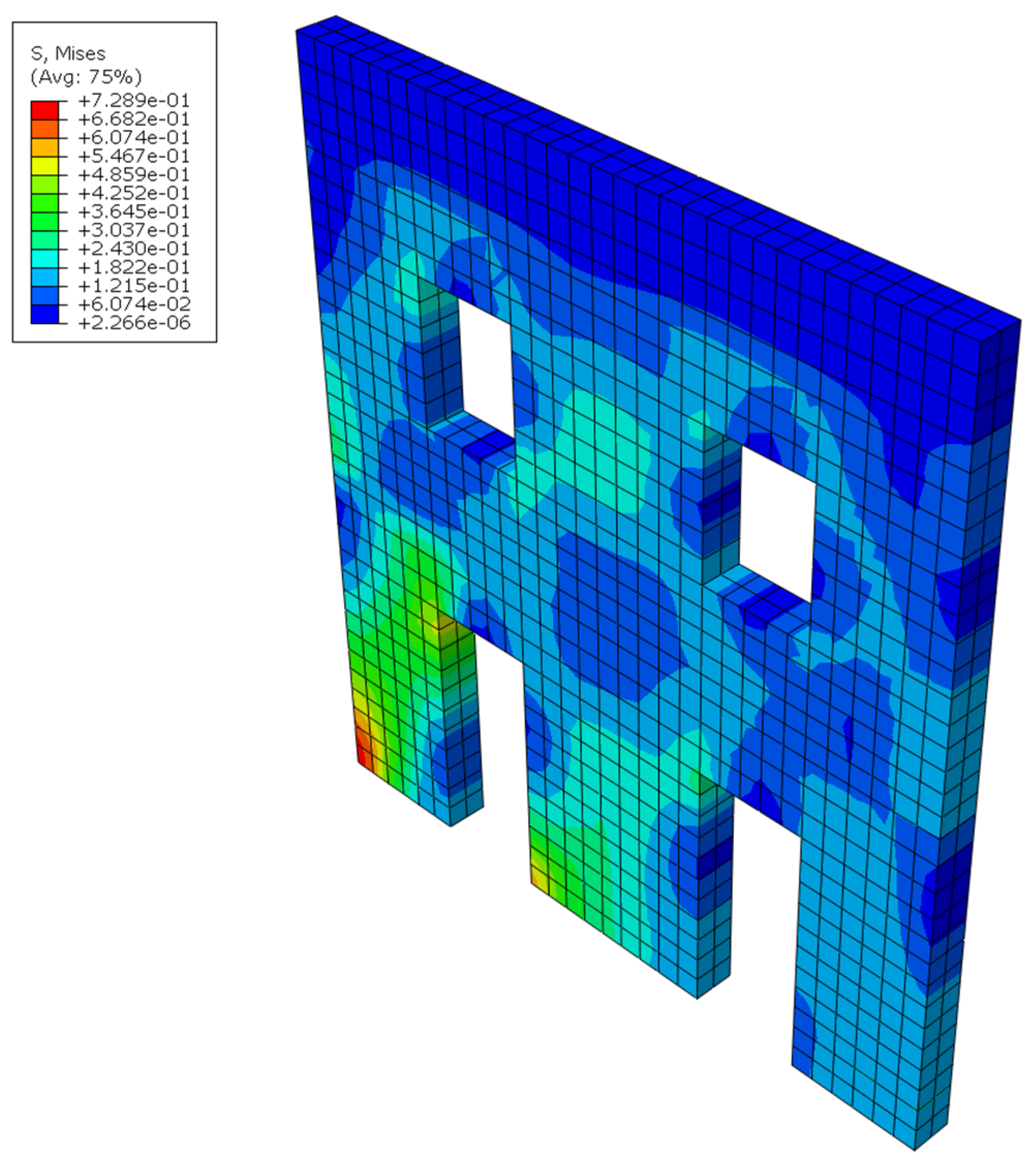
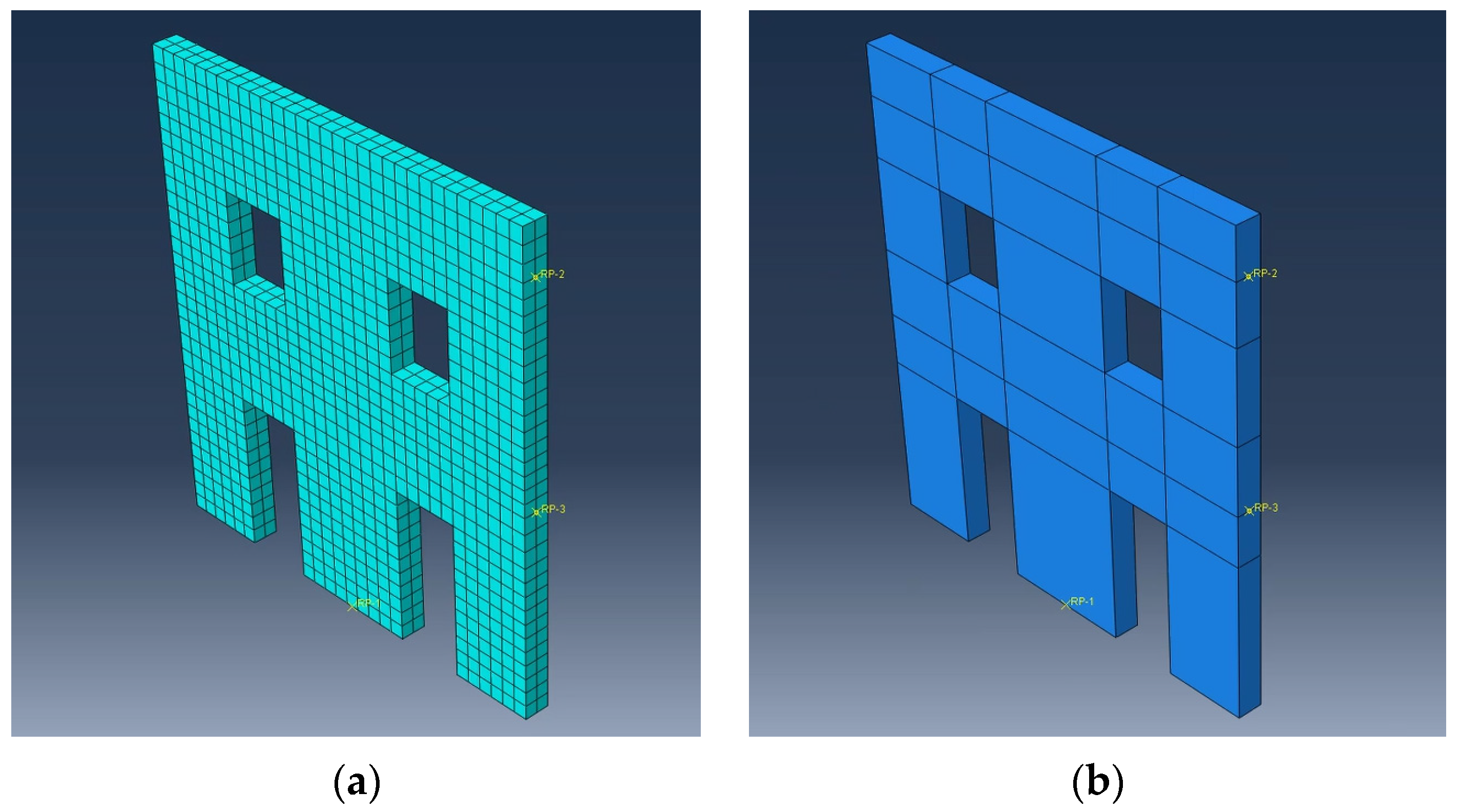
4.1. FEM Model and Numerical Analysis
4.2. Extended Drucker-Prager
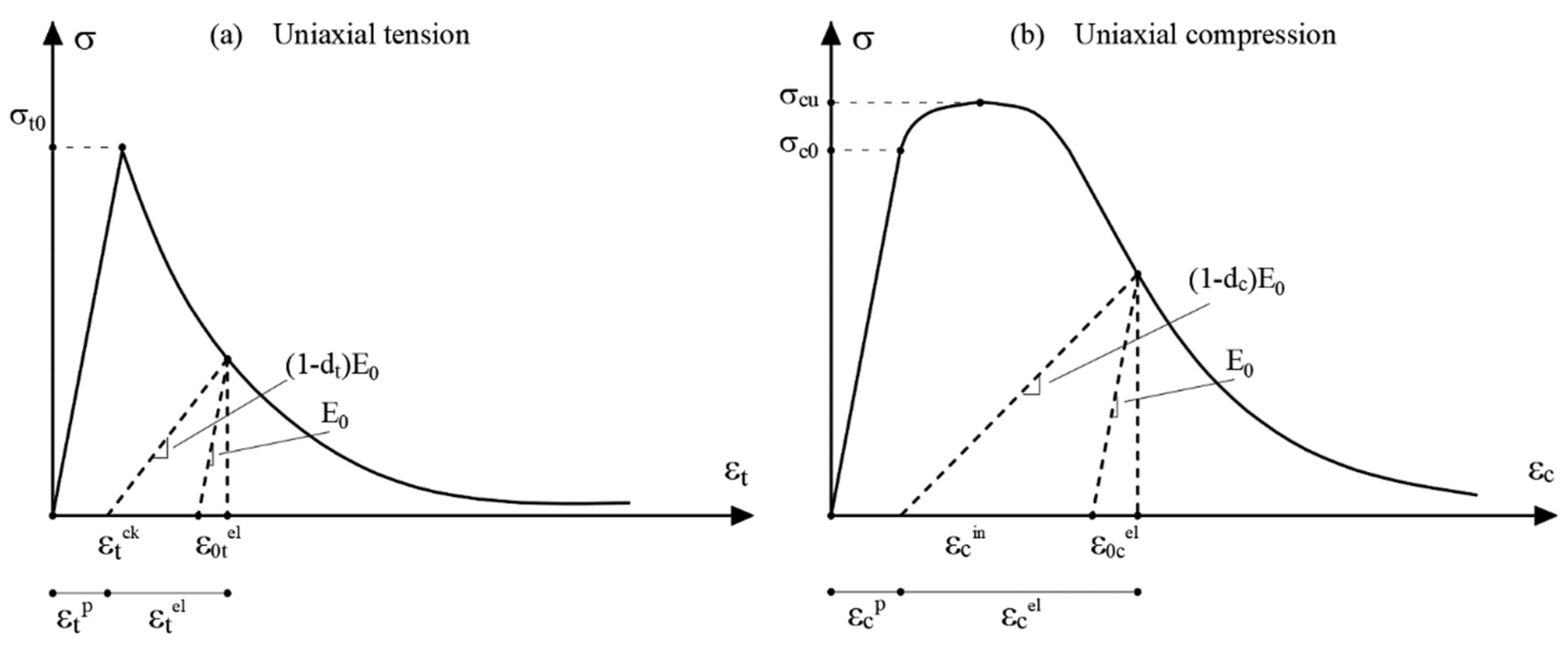
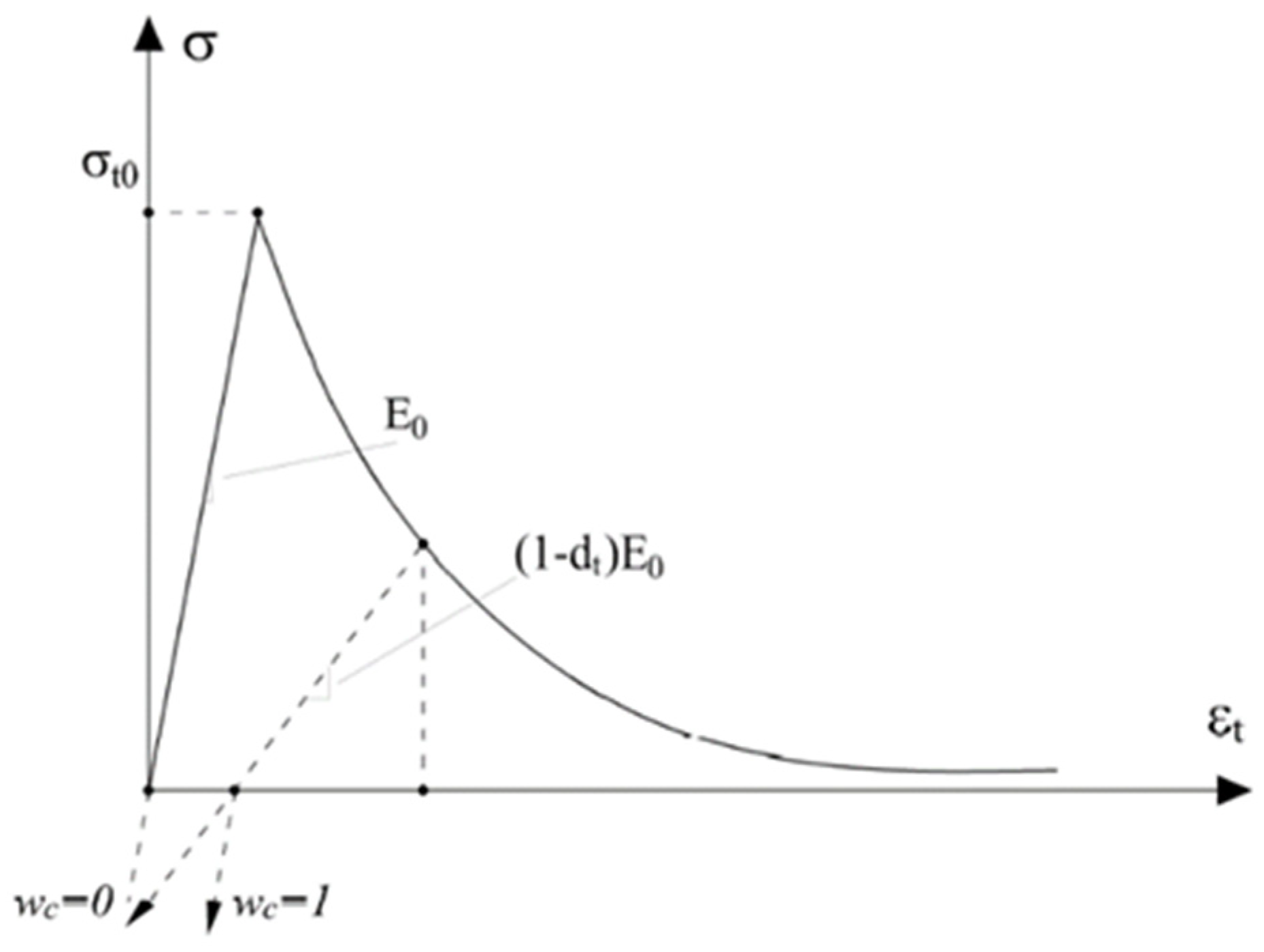
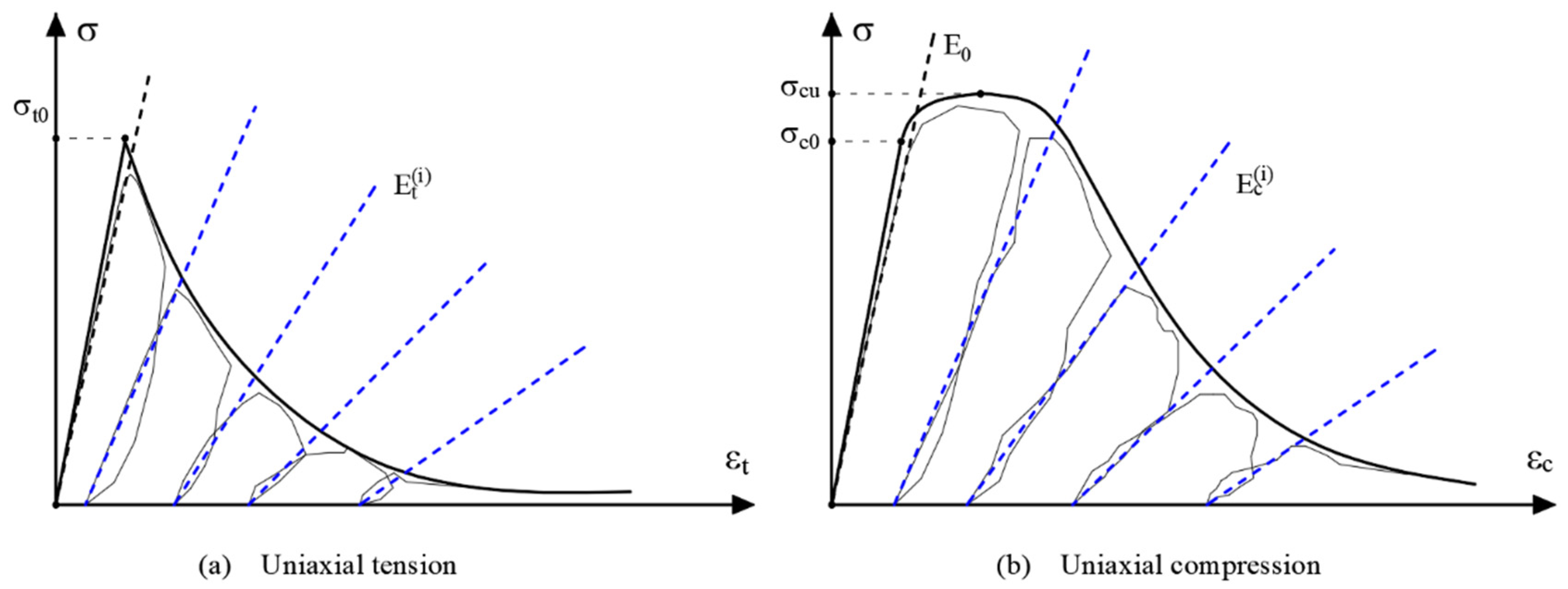
4.3. Concrete Damaged Plasticity
4.4. Drucker-Prager: Calibration of the Mechanical Parameters and Static Non-Linear Analysis Result
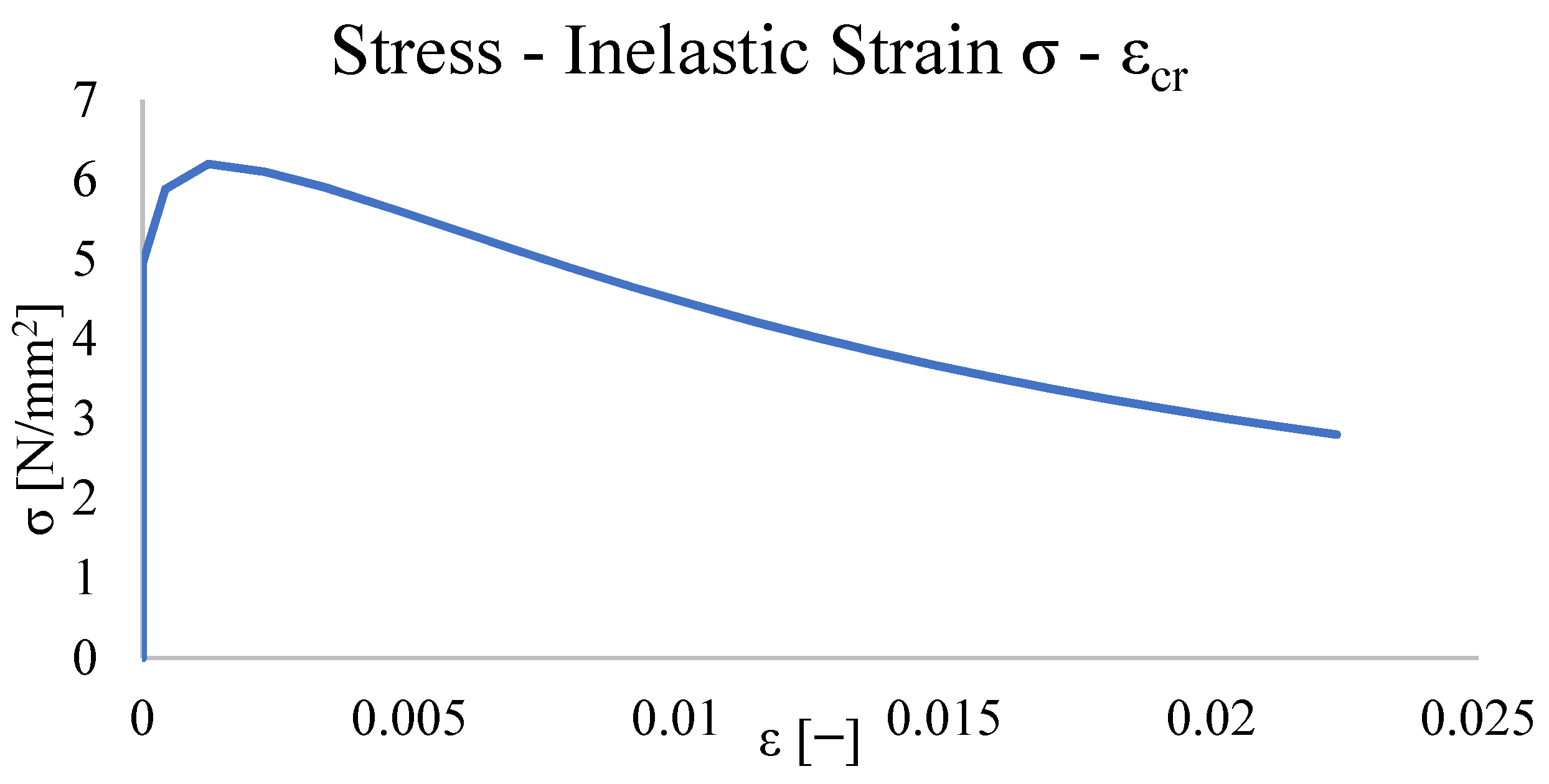
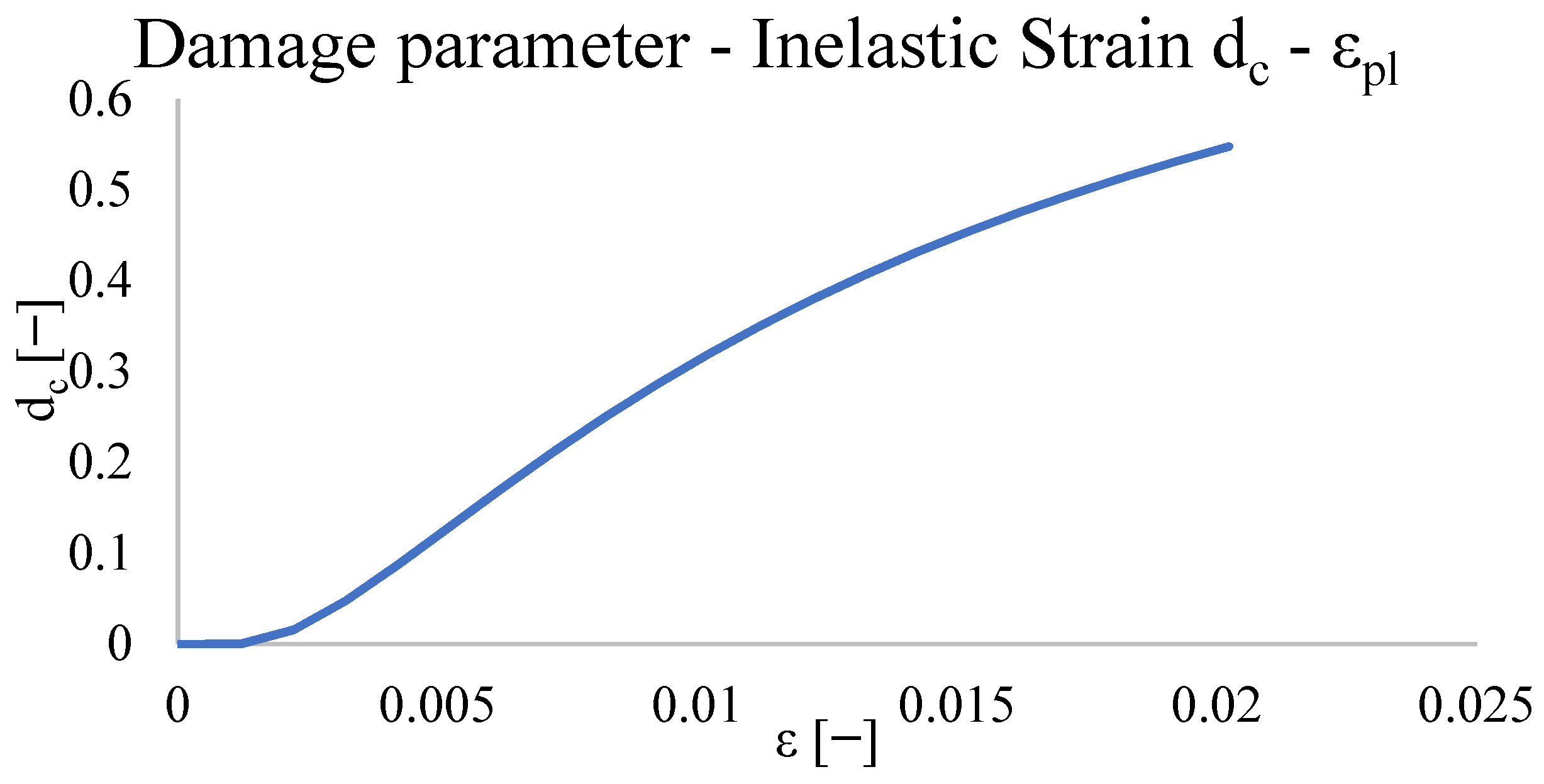
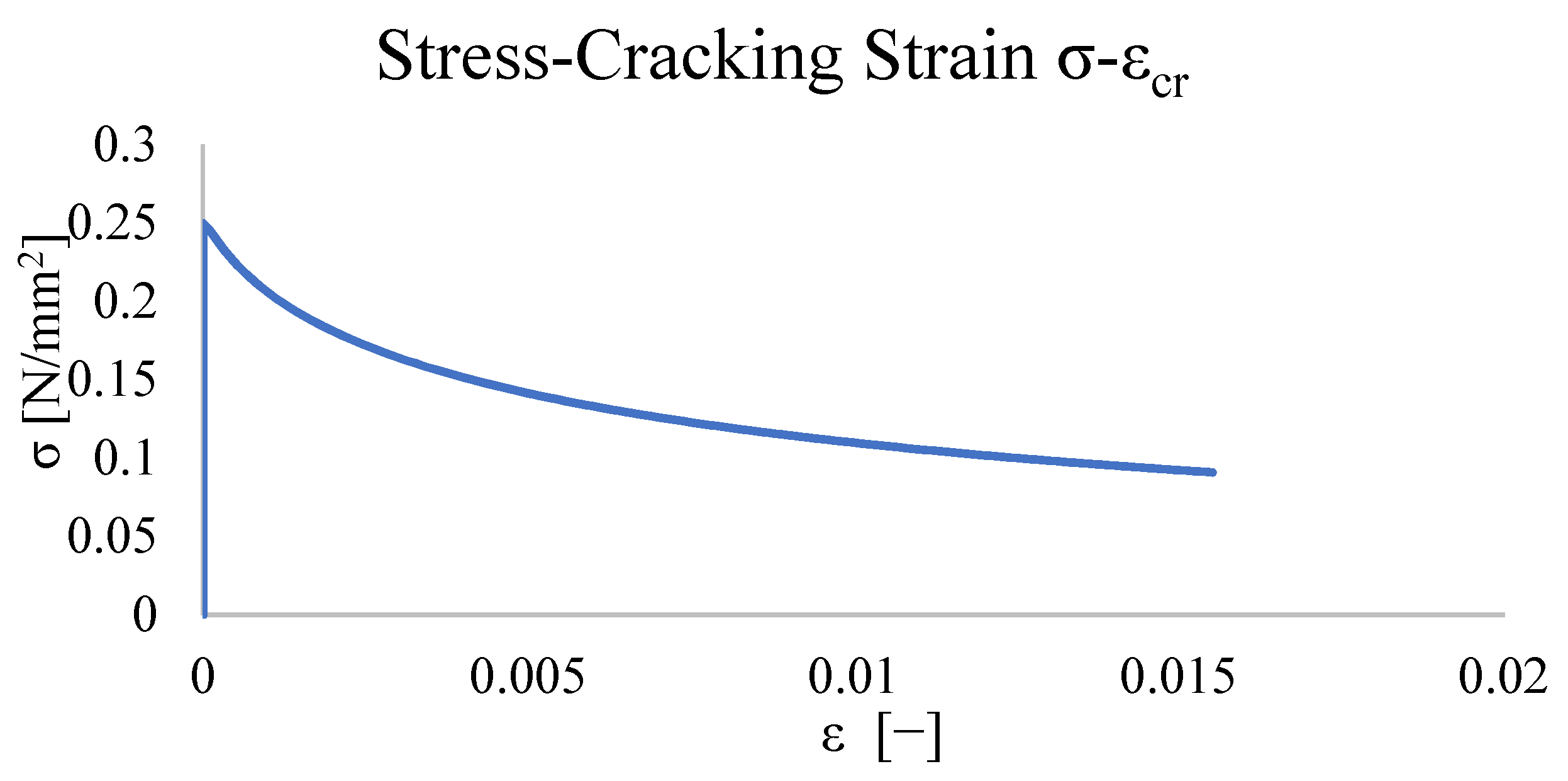
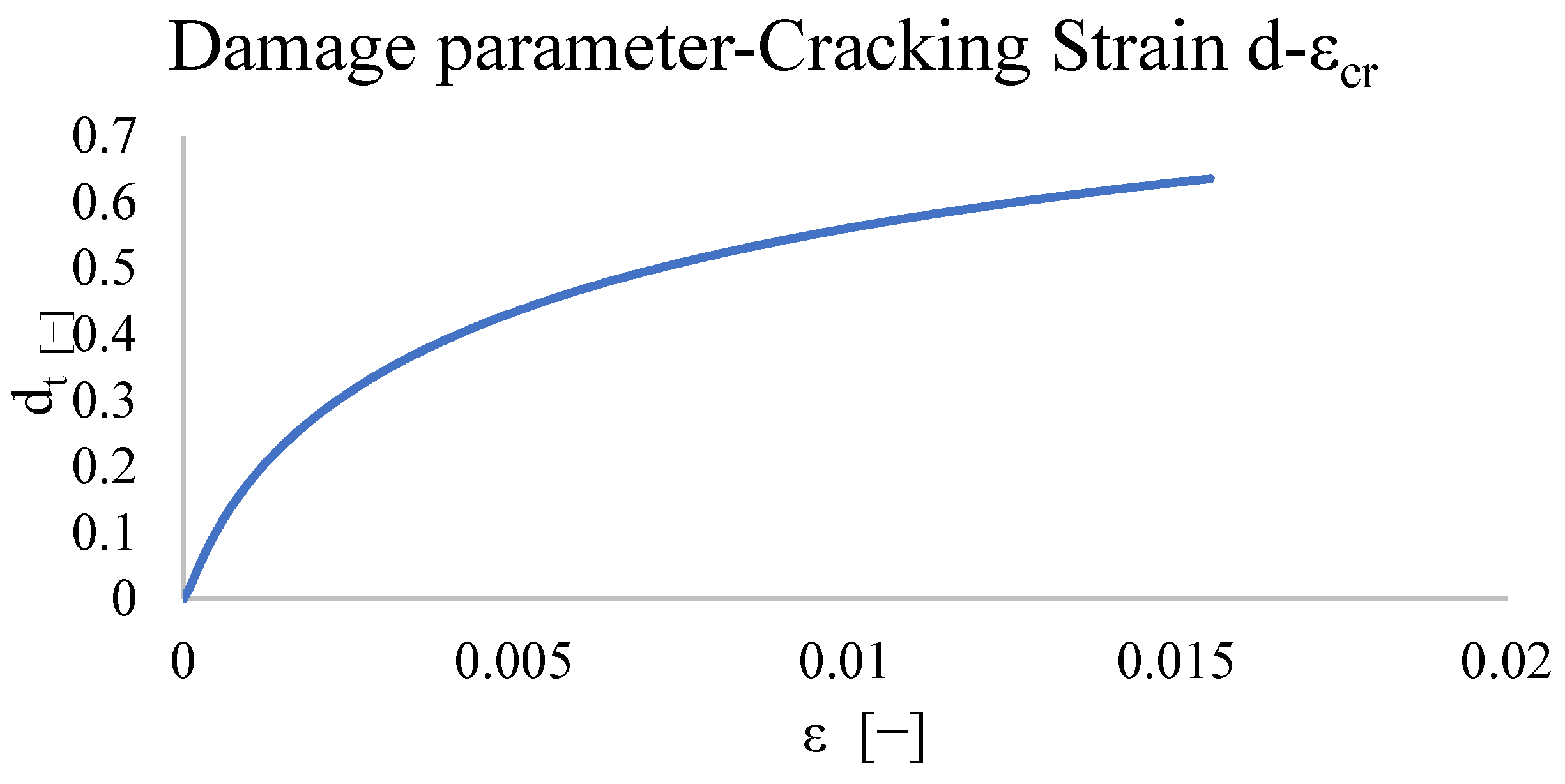
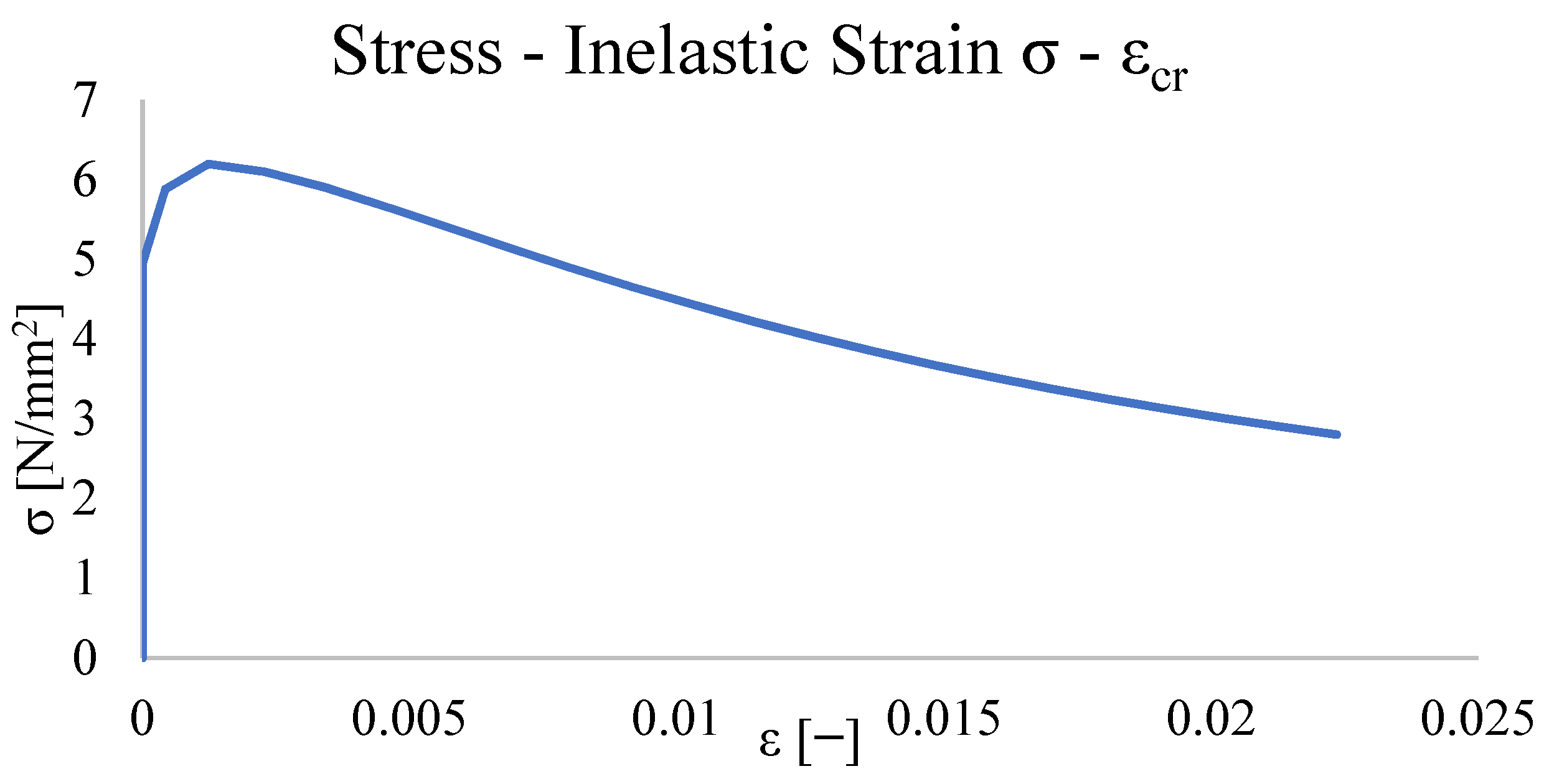
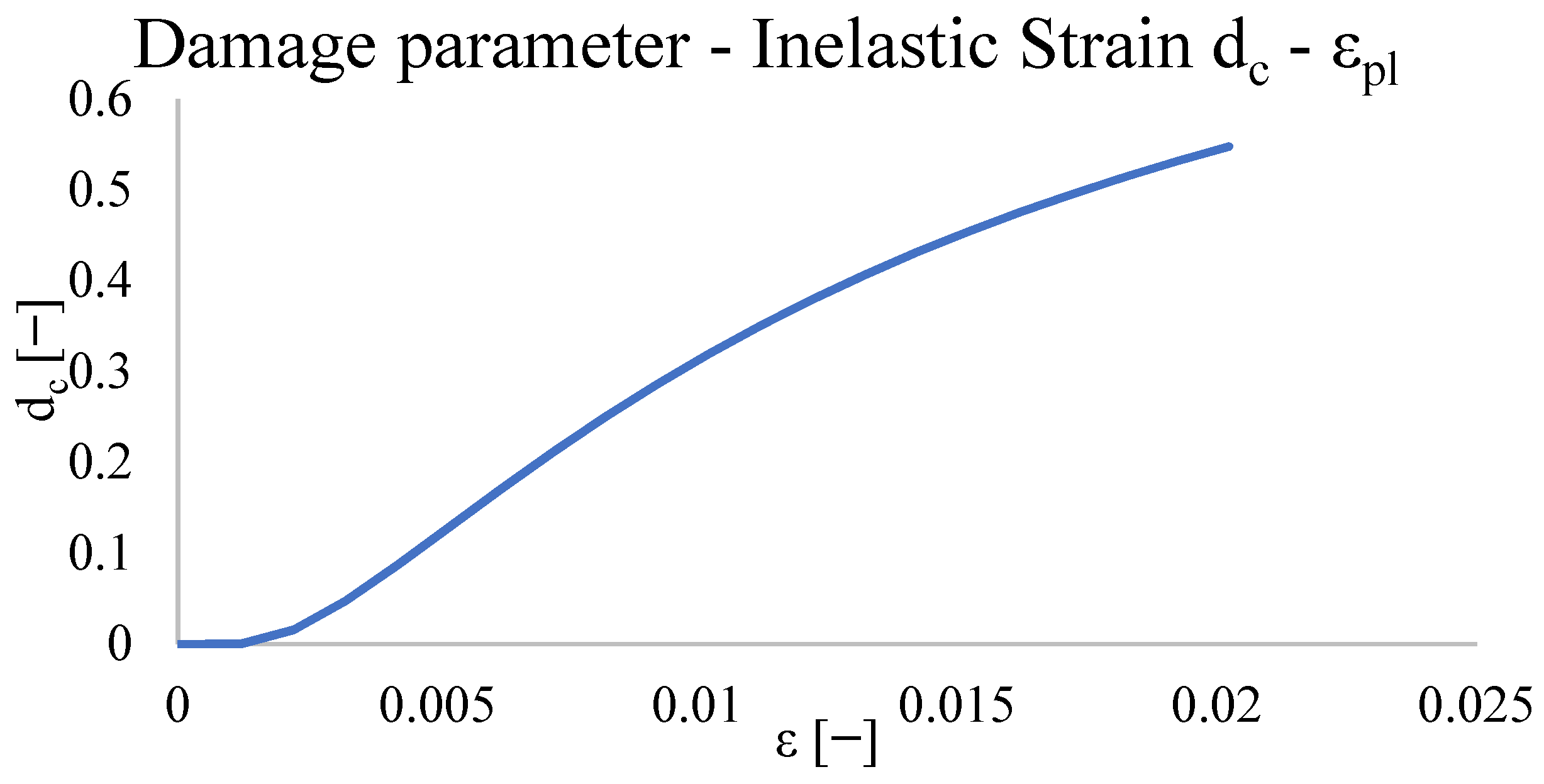
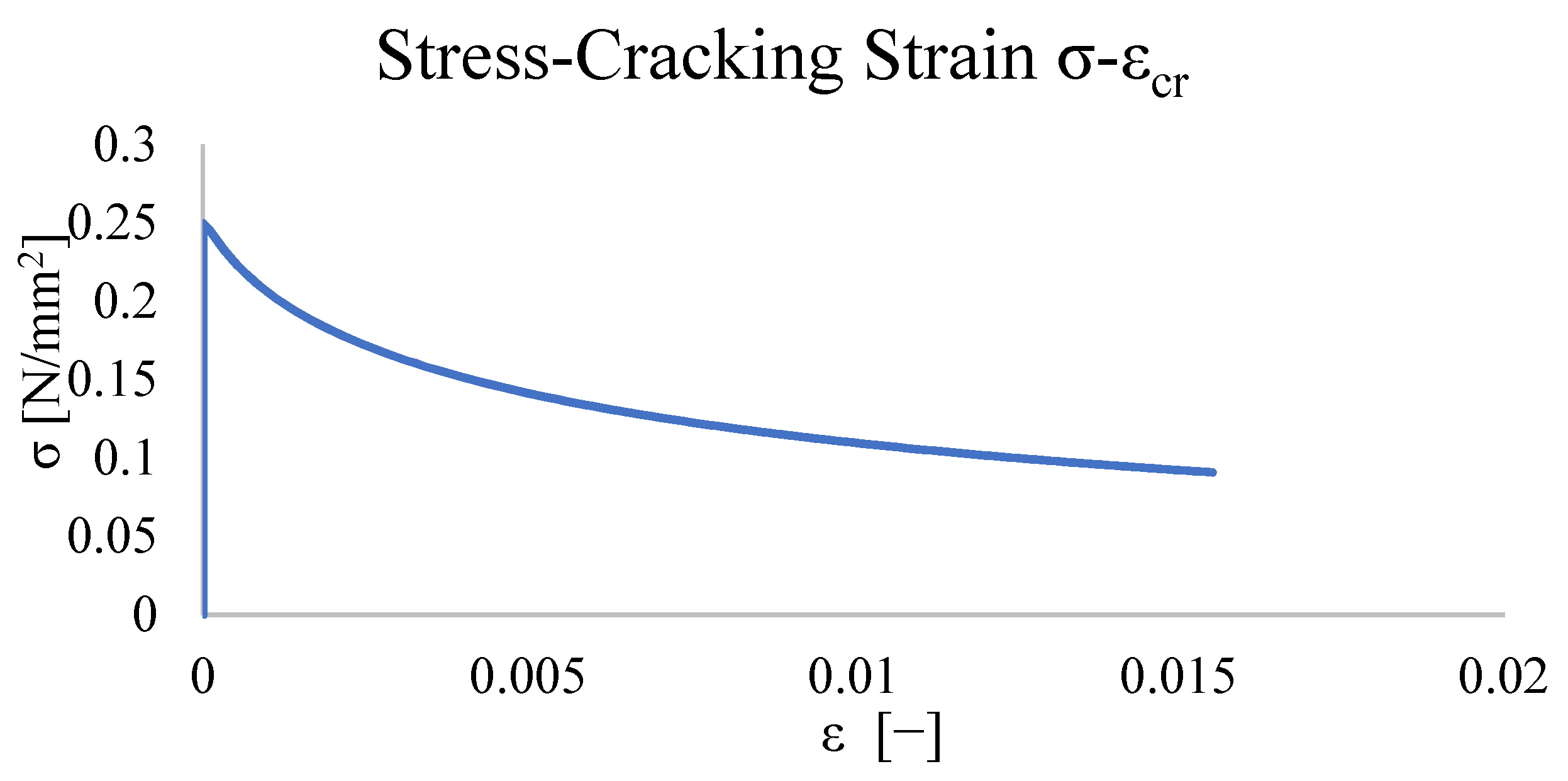
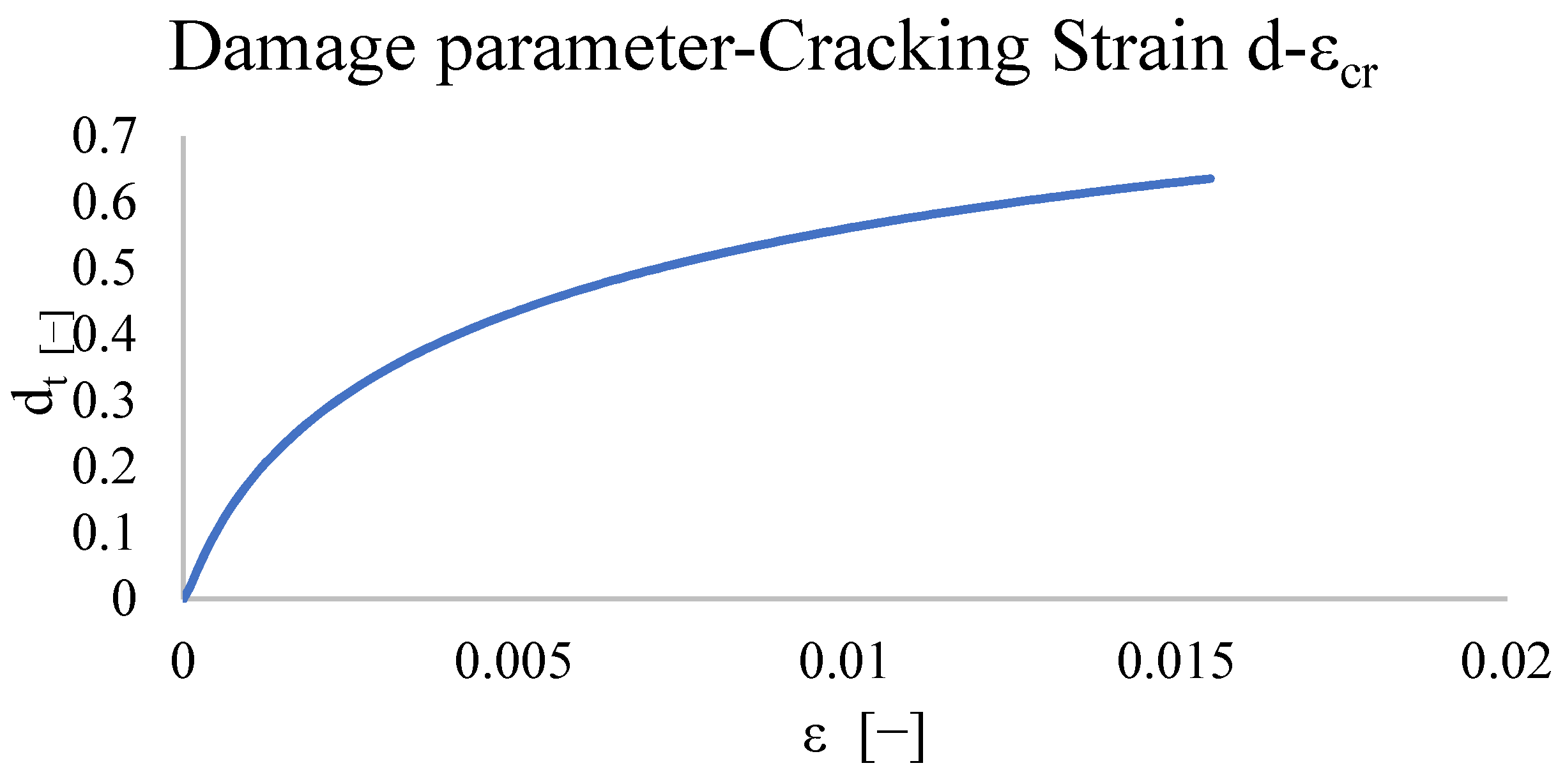
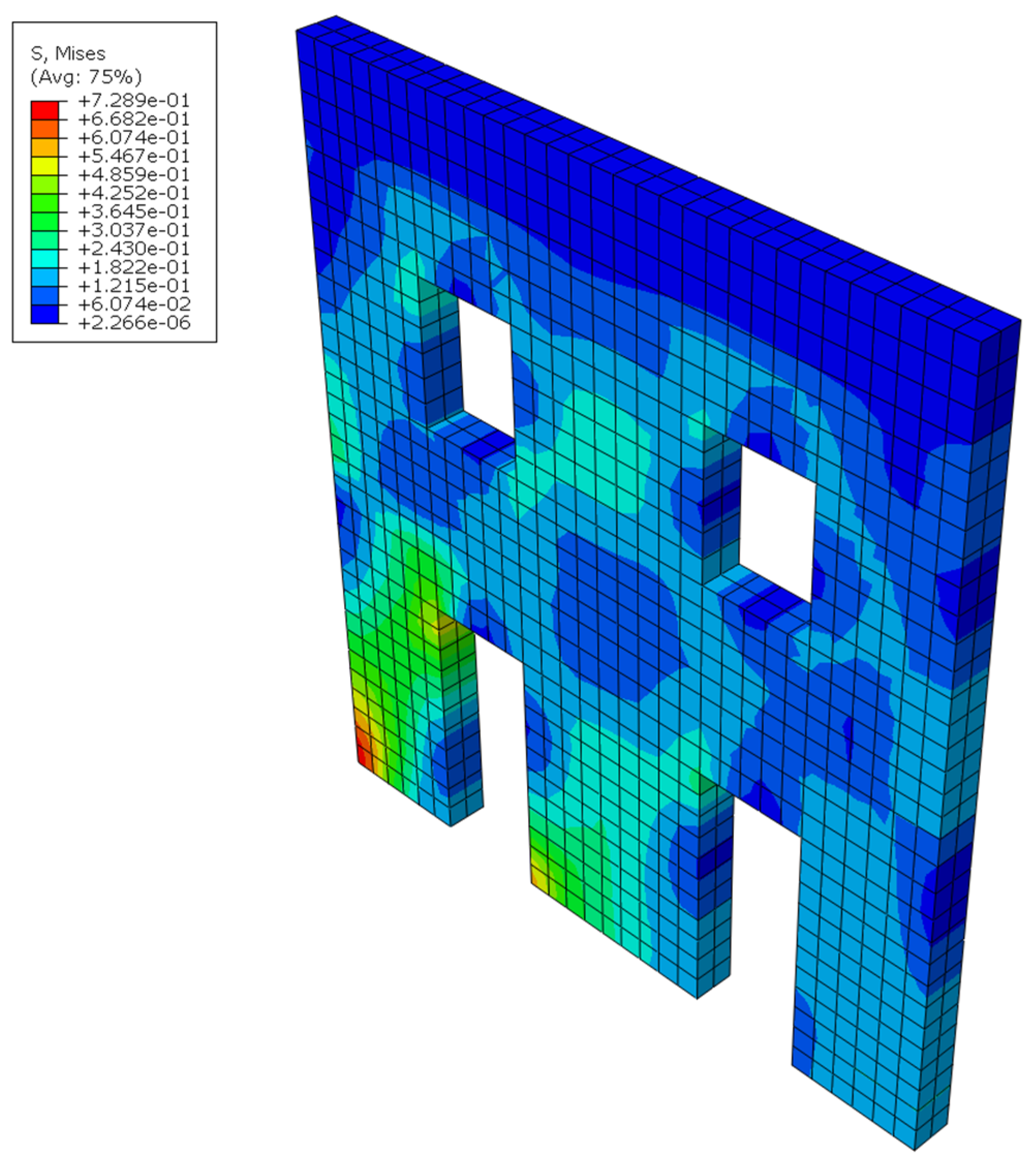
4.5. Concrete Damaged Plasticity: Calibration of the Mechanical Behaviour and Static Non-Linear Analysis Results
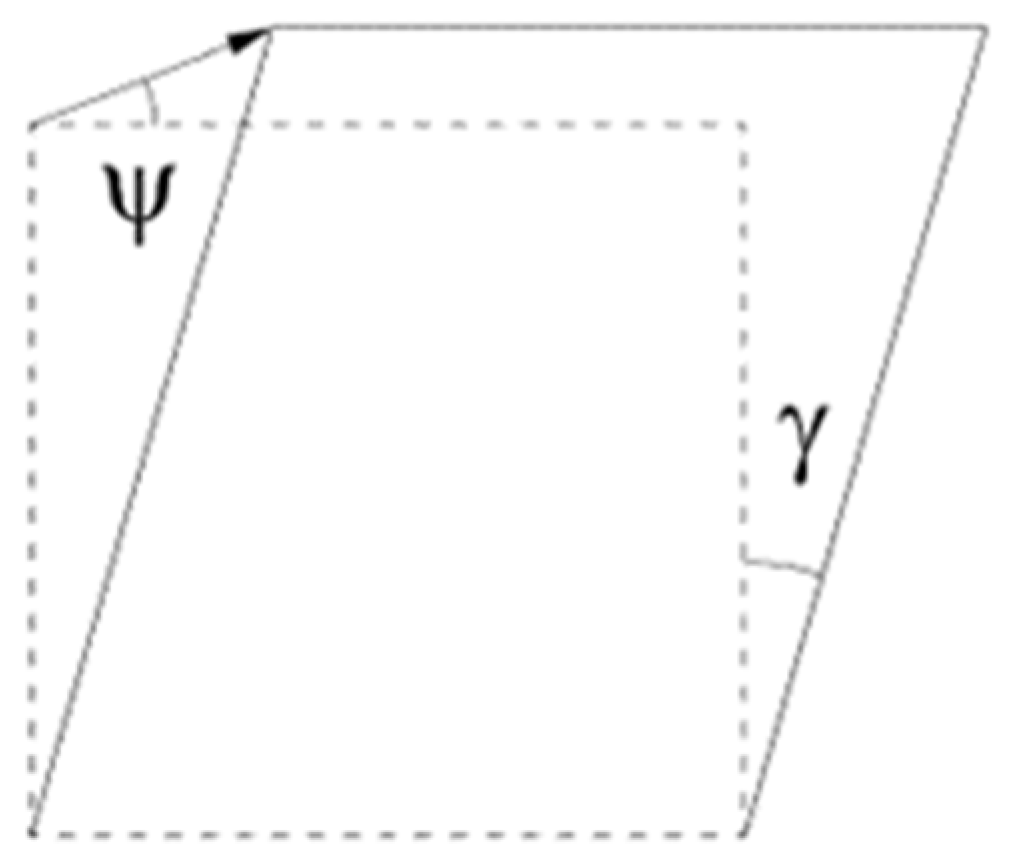
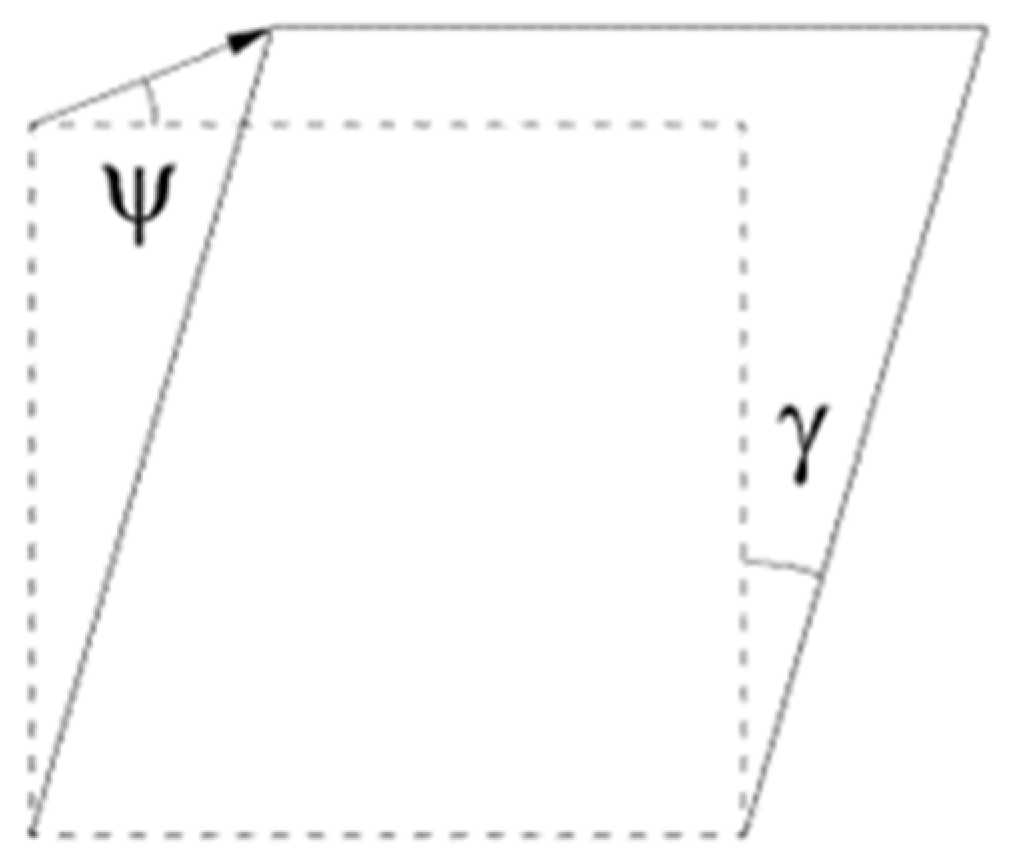
- 𝜓, dilation angle, in degrees [26];
- ε, flow potential eccentricity, is a small number with a positive sign, which defines the speed with which the hyperbolic flux potential approaches its asymptote, the recommended default value is equal to ε = 0.1;
- K, ratio between the radii of the meridians in tension and compression, the recommended default value is K = 2/3, the condition must be met according to which 0.5 ≤ K ≤ 1.0 in compliance with the convexity.
- μ–a viscosity parameter, it is considered only in the standard type Abaqus analyses and not in the explicit type analyses, for the visco-plastic regularization of the constitutive equations of the material, the default value is equal to 0.
5. Conclusions
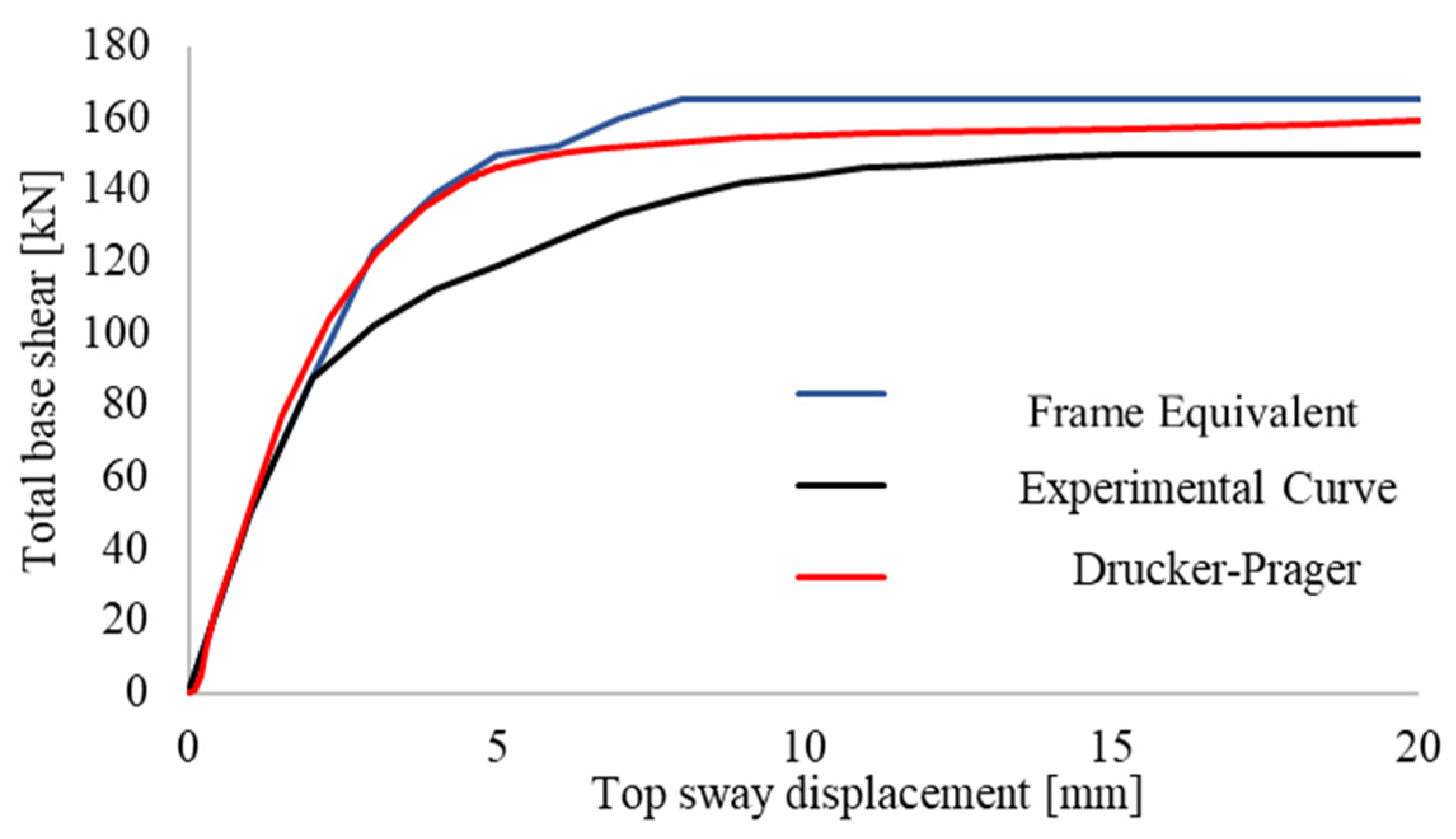
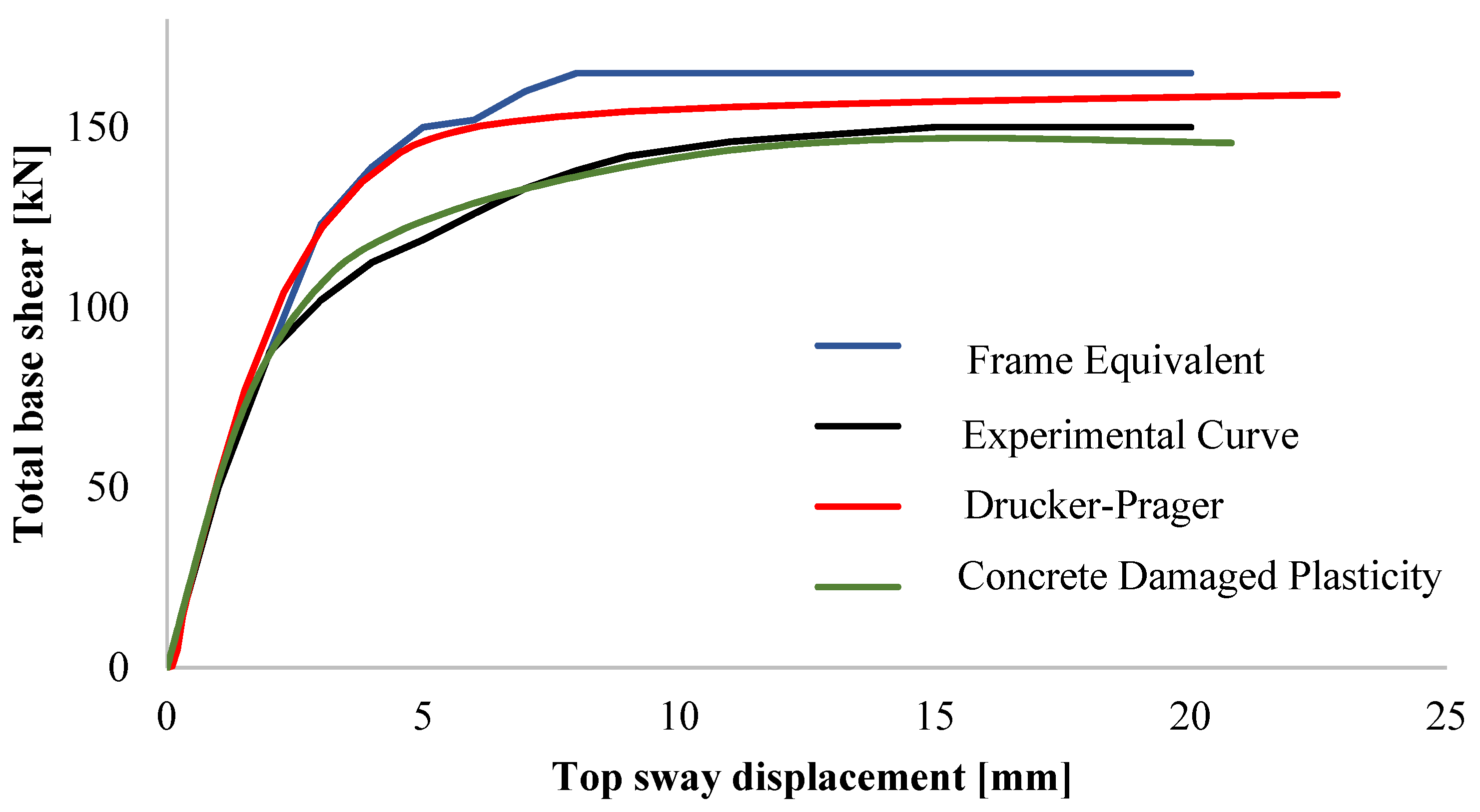
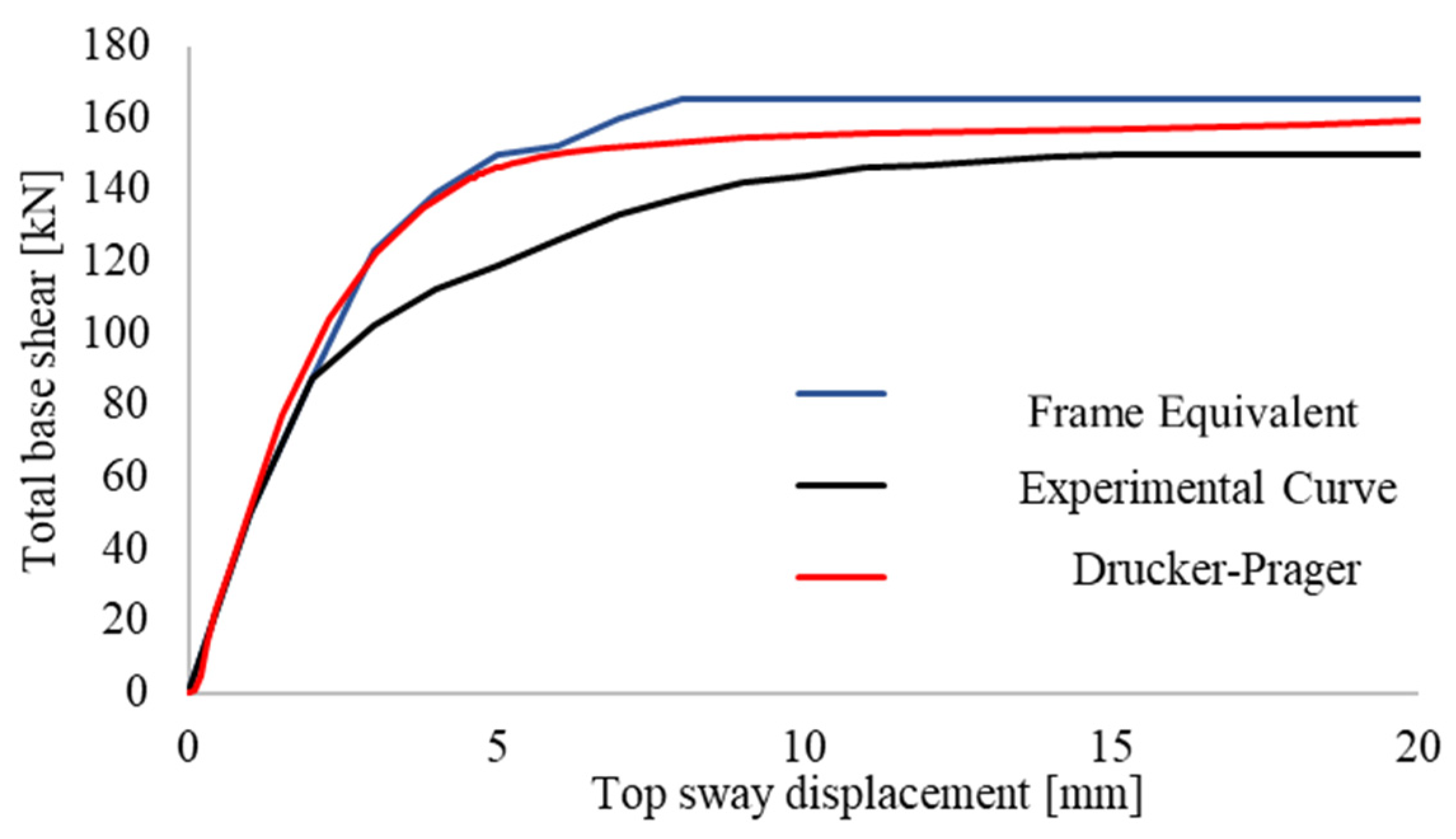
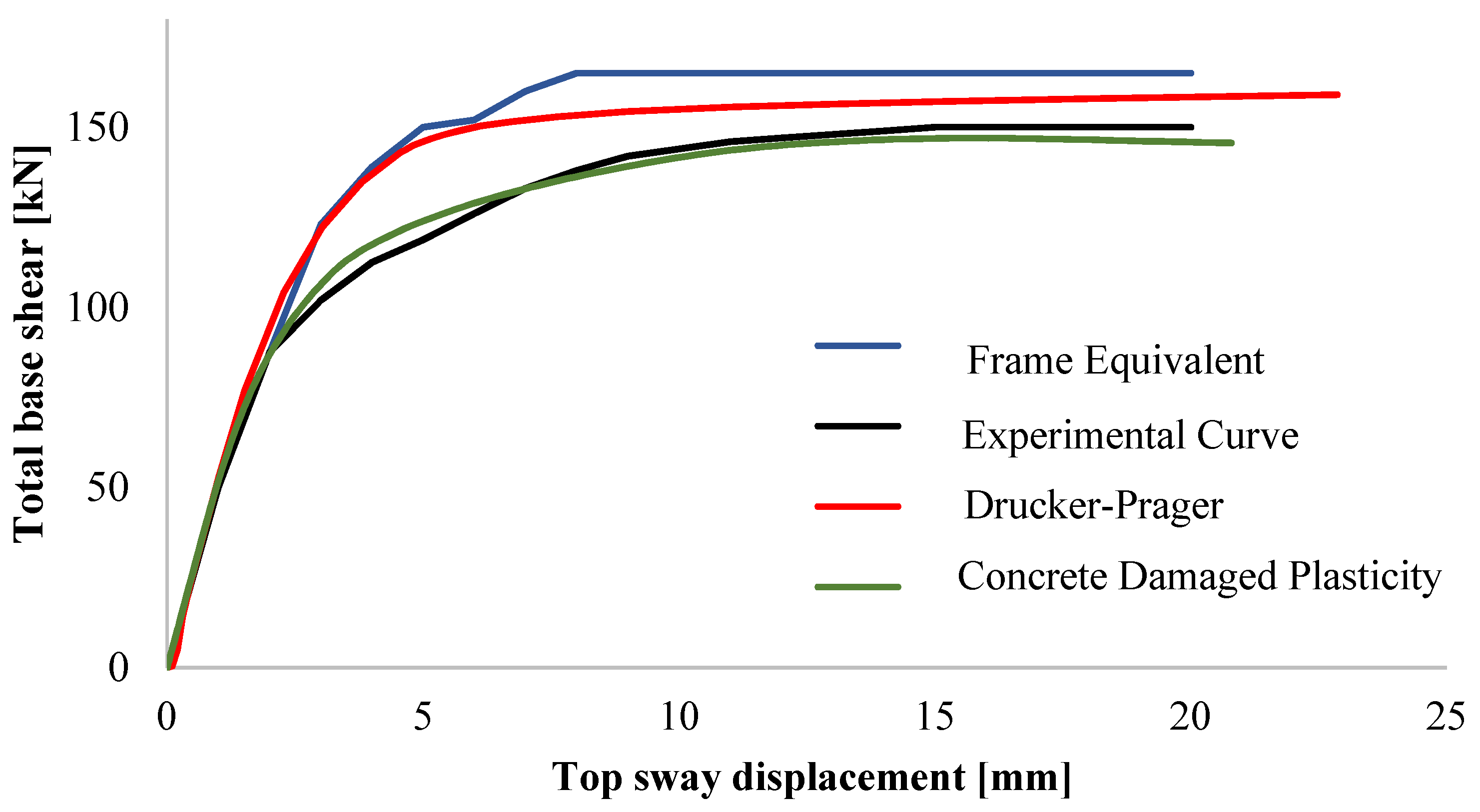
- all the curves fit well in the elastic range
- the only one that fits well in the knee zone of the pushover curve is the CDP Curve.
- the CDP model is suitable for the modelling of wall panels, especially for the control of cracks, because the evolution of the failure domain and therefore the parameters that govern its behaviour, are linked to the level of damage through the plastic deformation.
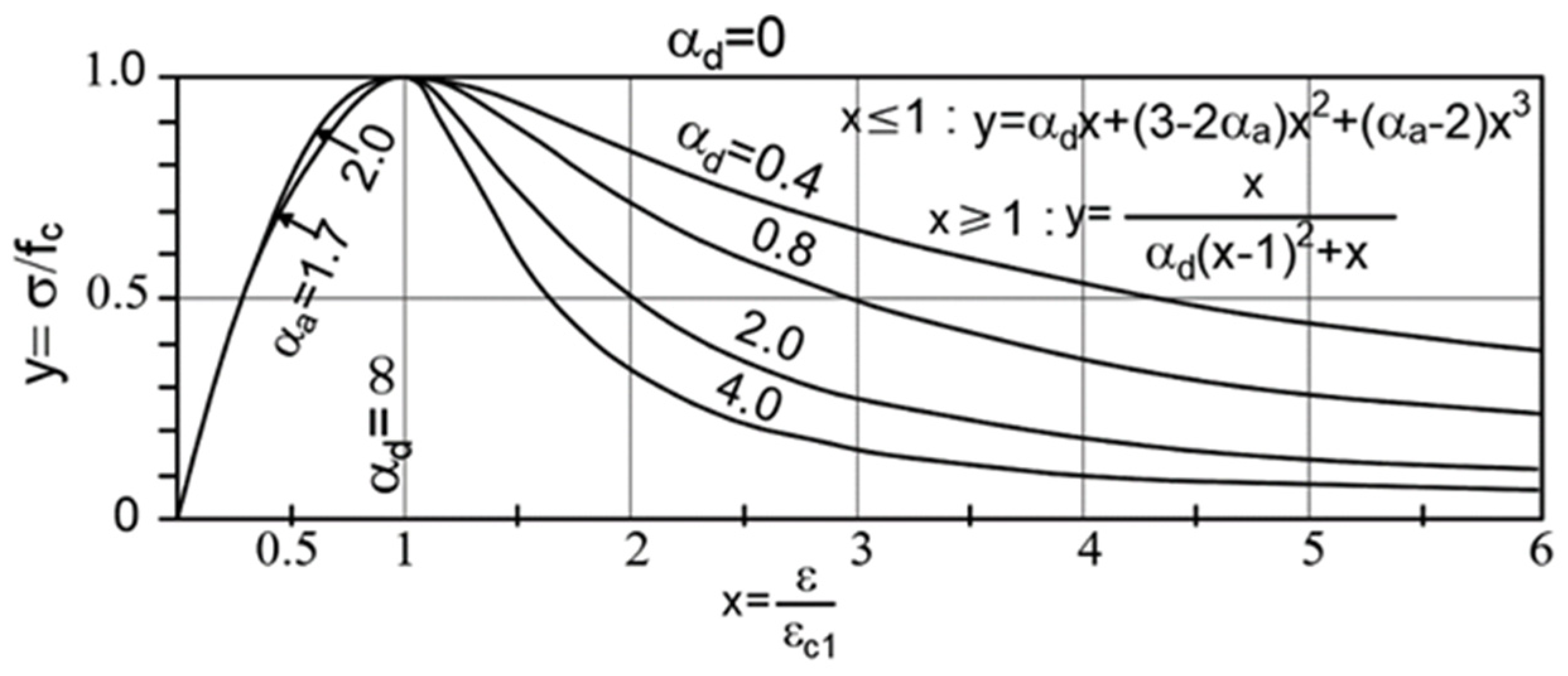
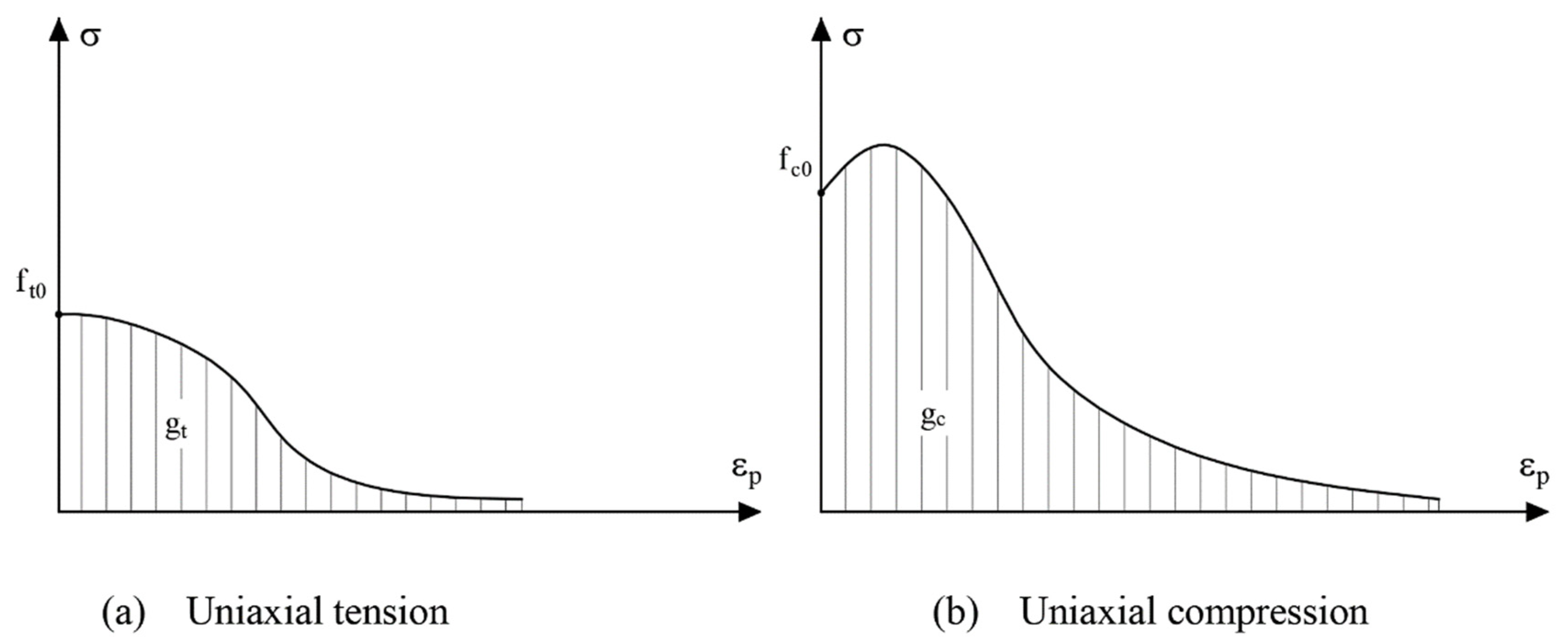
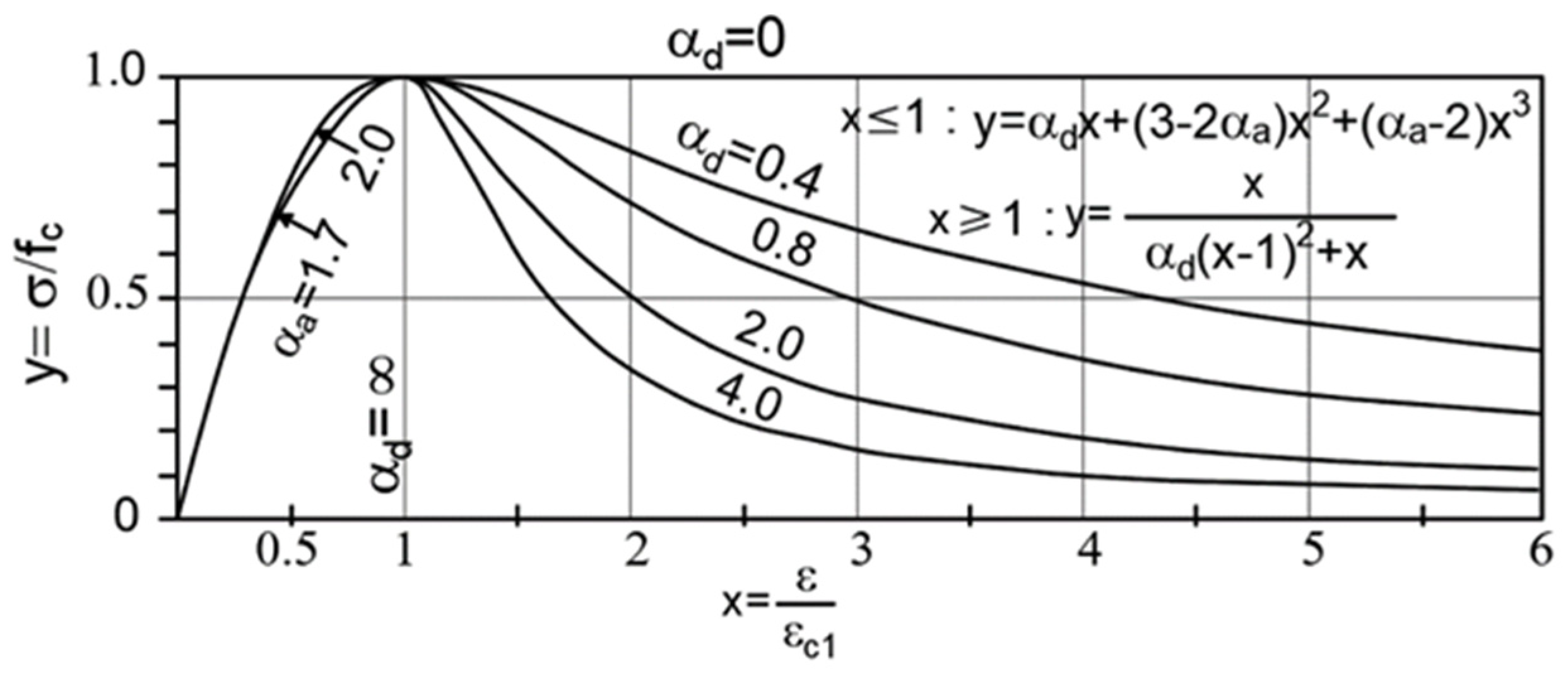
- The Guo model showed great flexibility and flexibility in the calibration process of uniaxial tension and compression curves.
- Sensitivity analysis demonstrated the importance of the calibration process showed in the paper for the definition of the uniaxial tension and compression curves.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, Z. Principles of Reinforced Concrete, 1st ed.; Butterworth-Heinemann: Oxford, UK, 2014. [Google Scholar]
- Noor-E-Khuda, S. An explicit finite-element modeling method for masonry walls using continuum shell element. J. Archit. Eng. 2021, 27, 04021040. [Google Scholar] [CrossRef]
- Sousa, R.; Guedes, J.; Sousa, H. Characterization of the uniaxial compression behaviour of unreinforced masonry—Sensitivity analysis based on a numerical and experimental approach. Arch. Civ. Mech. Eng. 2015, 15, 532–547. [Google Scholar] [CrossRef]
- D’Amato, M.; Sulla, R. Investigations of masonry churches seismic performance with numerical models: Application to a case study. Arch. Civ. Mech. Eng. 2021, 21, 161. [Google Scholar] [CrossRef]
- Calderón, S.; Sandoval, C.; Milani, G.; Arnau, O. Detailed micro-modeling of partially grouted reinforced masonry shear walls: Extended validation and parametric study. Arch. Civ. Mech. Eng. 2021, 21, 94. [Google Scholar] [CrossRef]
- Shakor, P.; Gowripalan, N.; Rasouli, H. Experimental and numerical analysis of 3D printed cement mortar specimens using inkjet 3DP. Arch. Civ. Mech. Eng. 2021, 21, 58. [Google Scholar] [CrossRef]
- Silva, R.; Costa, C.; Arêde, A. Numerical methodologies for the analysis of stone arch bridges with damage under railway loading. In Structures; Elsevier: Amsterdam, The Netherlands, 2022; Volume 39, pp. 573–592. [Google Scholar]
- Al-Fakih, A.; Al-Osta, M.A. Finite Element Analysis of Rubberized Concrete Interlocking Masonry under Vertical Loading. Materials 2022, 15, 2858. [Google Scholar] [CrossRef] [PubMed]
- Zizi, M.; Chisari, C.; Rouhi, J.; De Matteis, G. Comparative analysis on macroscale material models for the prediction of ma-sonry in-plane behavior. Bull. Earthq. Eng. 2022, 20, 963–996. [Google Scholar] [CrossRef]
- Karaton, M.; Aksoy, H.S.; Sayın, E.; Calayır, Y. Nonlinear seismic performance of a 12th century historical masonry bridge under different earthquake levels. Eng. Fail. Anal. 2017, 79, 408–421. [Google Scholar] [CrossRef]
- Nasiri, E.; Liu, Y. Development of a detailed 3D FE model for analysis of the in-plane behaviour of masonry infilled concrete frames. Eng. Struct. 2017, 143, 603–616. [Google Scholar] [CrossRef]
- Abrams, P.D.P.; Calvi, G.M. Proceedings of the U.S.-Italian Workshop on Guidelines for Seismic Evaluation and Rehavilitation of Unreiforced Masonry Buildings; Technical Report NCEER-94-0021 20 July 1994; University of Pavia: Pavia, Italy, 1994. [Google Scholar]
- Rizzano, G.R.; Sabatino, R.; Torello, G. Un nuovo modello a telaio equivalente per l’analisi statica non lineare di pareti in muratura. In Proceedings of the ANIDIS 2011 Italian National Conference on Earthquake Engineering, Bari, Italy, 18–22 September 2011. [Google Scholar]
- Faella, C.; Consalvo, V.; Nigro, E. Influenza della snellezza geometrica e delle fasce di piano sulla valutazione della resistenza ultima di pareti murarie multipiano. In Proceedings of the Atti Dell’ VIII Convegno L’ingegneria Sismica in Italia, Taormina, Italy, 25–27 August 1997. [Google Scholar]
- Chen, W.F.; Han, D.J. Plasticity for Structural Engineers; J. Ross Publishing, Inc.: Fort Lauderdale, FL, USA, 2007. [Google Scholar]
- Kwon, Y.W. Revisiting Failure of Brittle Materials. J. Press. Vessel. Technol. 2021, 143, 4050989. [Google Scholar] [CrossRef]
- Lubliner, J.; Oliver, J.; Oller, S.; Oñate, E. A plastic-damage model for concrete. Int. J. Solids Struct. 1989, 25, 299–326. [Google Scholar] [CrossRef]
- Panoskaltsis, V.P.; Lubliner, J.; Monteiro, P.J. Rate dependent plasticity and damage for concrete. In Proceedings of the Engineering Foundation Conference, New Delhi, India, 5–10 January 1994; pp. 27–40. [Google Scholar]
- Chen, W.F. Concrete Plasticity: Recent Developments. Appl. Mech. Rev. 1994, 47, S86–S90. [Google Scholar] [CrossRef]
- Santos, C.F.; Alvarenga, R.C.; Ribeiro, J.C.; Castro, L.O.; Silva, R.M.; Santos, A.A.; Nalon, G.H. Numerical and experimental evaluation of masonry prisms by finite element method. Ibracon Struct. Mater. J. 2017, 10, 477–508. [Google Scholar] [CrossRef]
- Lee, J.; Fenves, G.L. Numerical Implementation of Plastic Damage Model for Concrete under Cyclic Loading: Application to Concrete Dam; Rep. No. UCB/SEMM-94/03; Department of Civil Engineering, University of California: Berkeley, CA, USA, 1994. [Google Scholar]
- Serpieri, R.; Alfano, G.; Sacco, E. A mixed-mode cohesive-zone model accounting for finite dilation and asperity degradation. Int. J. Solids Struct. 2015, 67–68, 102–115. [Google Scholar] [CrossRef]
- Mousavian, E.; Casapulla, C.; Bagi, K. The Influence of Geometry on the Frictional Sliding of ∧ and ∨ Shaped Interlocking Joints in Masonry Assemblages. In Proceedings of the International Conference on Architecture, Materials and Construction, Lisbon, Portugal, 26–28 October 2022; pp. 37–45. [Google Scholar] [CrossRef]
- Kujawa, M.; Lubowiecka, I.; Szymczak, C. Finite element modelling of a historic church structure in the context of a masonry damage analysis. Eng. Fail. Anal. 2019, 107, 104233. [Google Scholar] [CrossRef]
- Calderoni, B.; Cordasco, E.A.; Guerriero, L.; Lenza, P.; Manfredi, G. Mechanical Behaviour of Post Medieval Tuff Masonry of the Naples area. Mason. J. 2009, 21, 85–96. [Google Scholar]
- Grande, E.; Romano, A. Experimental investigation and numerical analysis of tuff-brick listed masonry panels. Mater. Struct. 2013, 46, 63–75. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E [MPa] | G [MPa] | fwc [MPa] | fvd0 [MPa] | c [MPa] | μ [−] | fbt [MPa] | |
|---|---|---|---|---|---|---|---|
| Masonry | 1400 | 480 | 6.20 | 0.18 | |||
| Mortar | 0.23 | 0.58 | |||||
| Bricks | 1.22 |
| H [m] | L [m] | λ [−] | c [MPa] | ceq/c [−] | cu [MPa] | |
|---|---|---|---|---|---|---|
| 6.43 | 6 | 1.072 | 433.04 | 0.23 | 1.256 | 0.289 |
| E [MPa] | φ [−] | K [−] | [−] | |
|---|---|---|---|---|
| 1400 | 30.11 | 1.0 | 20 | 0.25 |
| Ecm [MPa] | fbm [MPa] | εc1 [−] | Ec1 [MPa] | αa [−] | αd [−] | εyc [−] |
|---|---|---|---|---|---|---|
| 1400 | 6.2 | 0.005 | 1240 | 1.29 | 0.4 | 0.0031 |
| Ecm [MPa] | fbtm [MPa] | εc1 [−] | αt [−] |
|---|---|---|---|
| 1400 | 0.25 | 0.0001786 | 0.078 |
| 𝛹 [°] | ε [−] | K [−] | σb0/σc0 [−] |
|---|---|---|---|
| 20 | 0.1 | 0.5 | 1.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nastri, E.; Todisco, P. Macromechanical Failure Criteria: Elasticity, Plasticity and Numerical Applications for the Non-Linear Masonry Modelling. Buildings 2022, 12, 1245. https://doi.org/10.3390/buildings12081245
Nastri E, Todisco P. Macromechanical Failure Criteria: Elasticity, Plasticity and Numerical Applications for the Non-Linear Masonry Modelling. Buildings. 2022; 12(8):1245. https://doi.org/10.3390/buildings12081245
Chicago/Turabian StyleNastri, Elide, and Paolo Todisco. 2022. "Macromechanical Failure Criteria: Elasticity, Plasticity and Numerical Applications for the Non-Linear Masonry Modelling" Buildings 12, no. 8: 1245. https://doi.org/10.3390/buildings12081245
APA StyleNastri, E., & Todisco, P. (2022). Macromechanical Failure Criteria: Elasticity, Plasticity and Numerical Applications for the Non-Linear Masonry Modelling. Buildings, 12(8), 1245. https://doi.org/10.3390/buildings12081245