
Dynamic Characteristic and Parameter Analysis of a Modular Building with Suspended Floors

Abstract
:1. Introduction
2. Configuration of Module Building with Suspended Floors
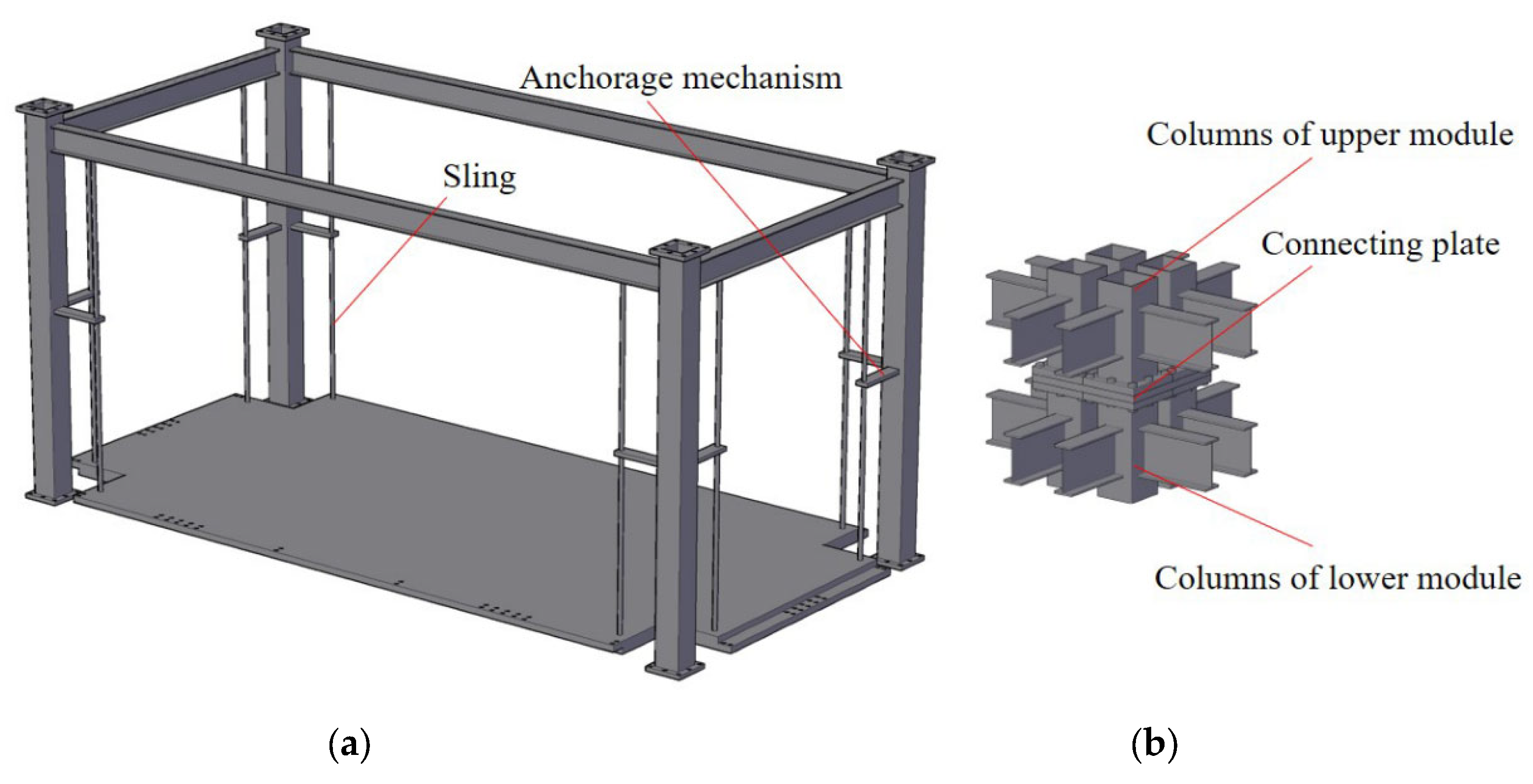
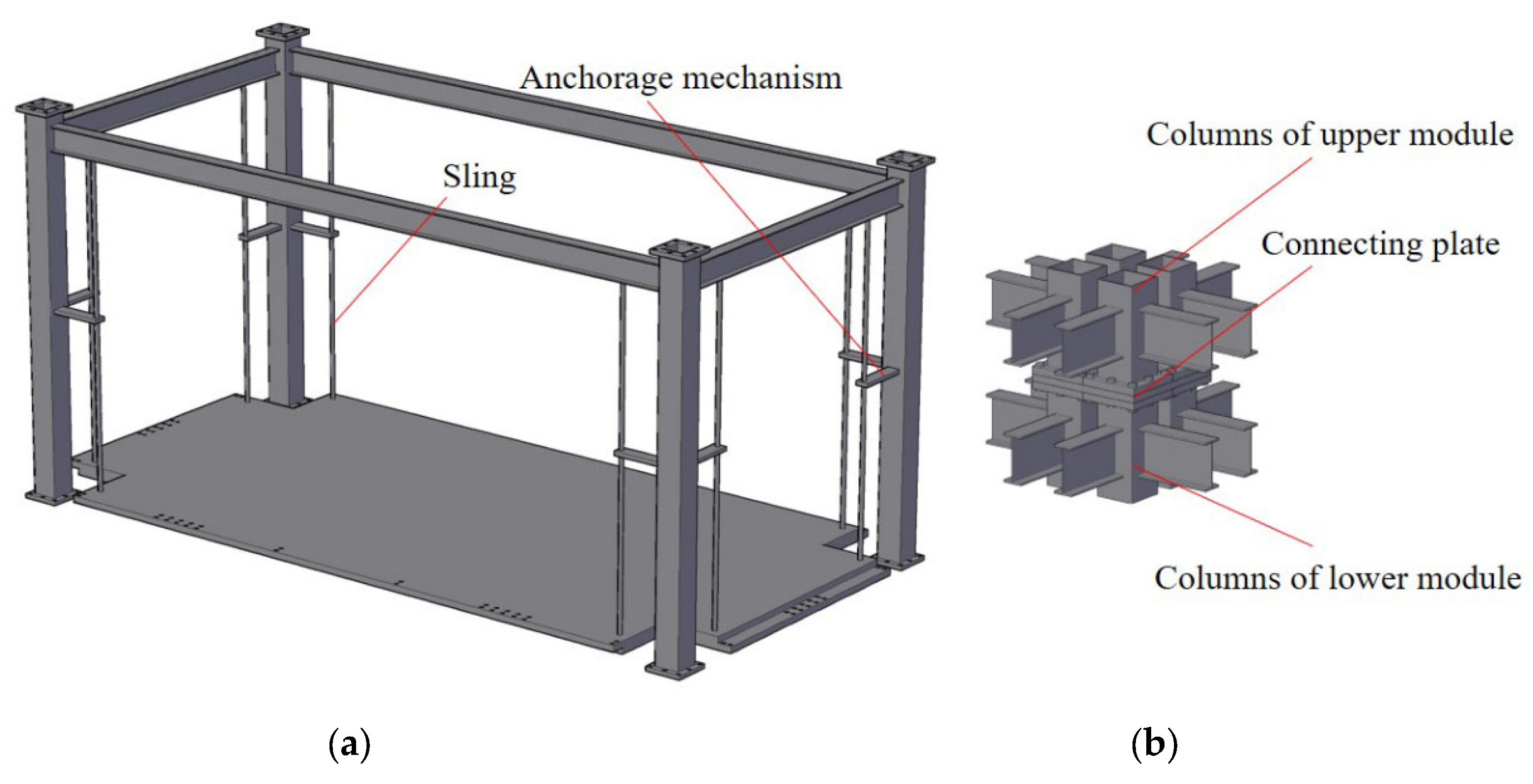
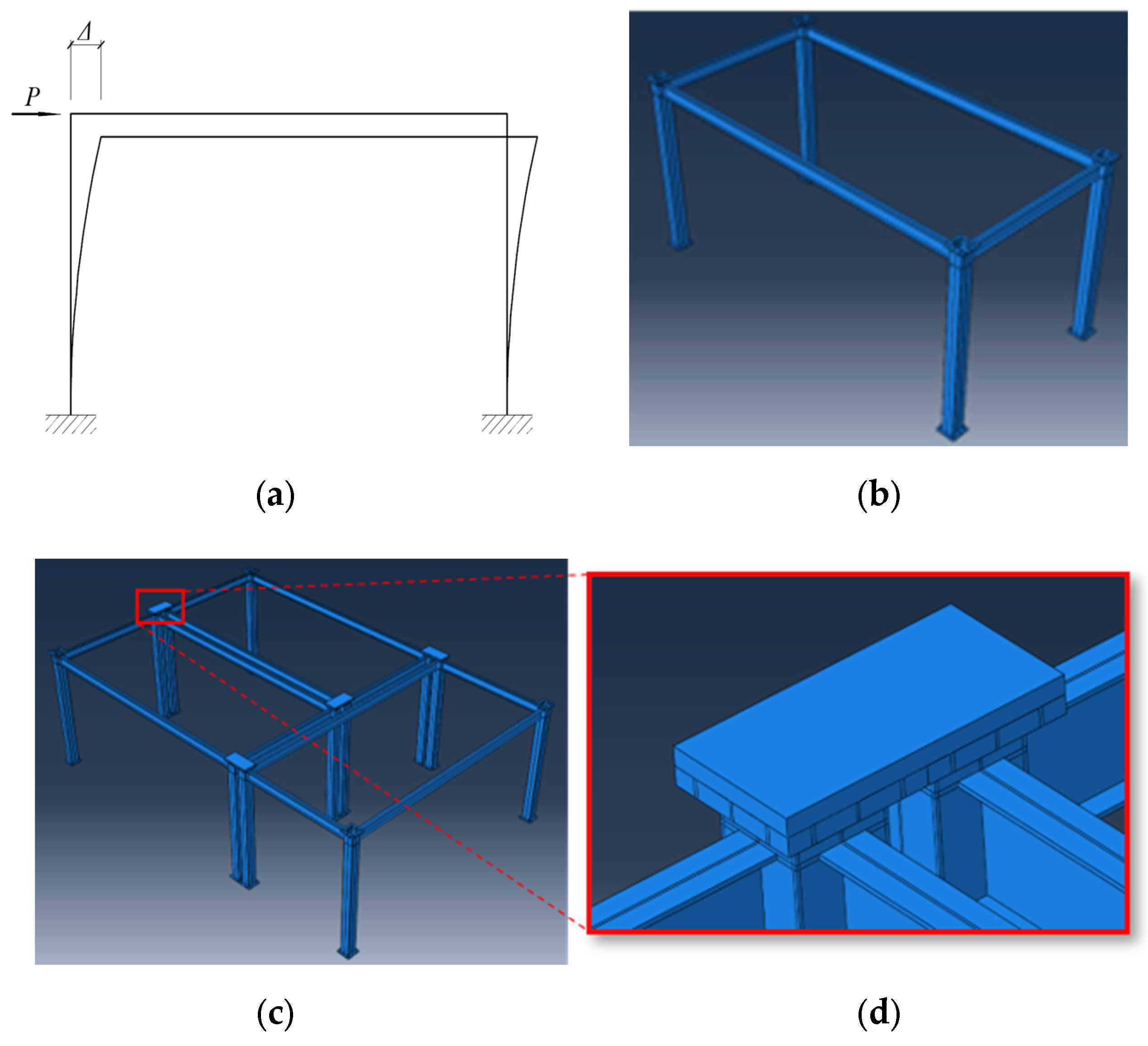
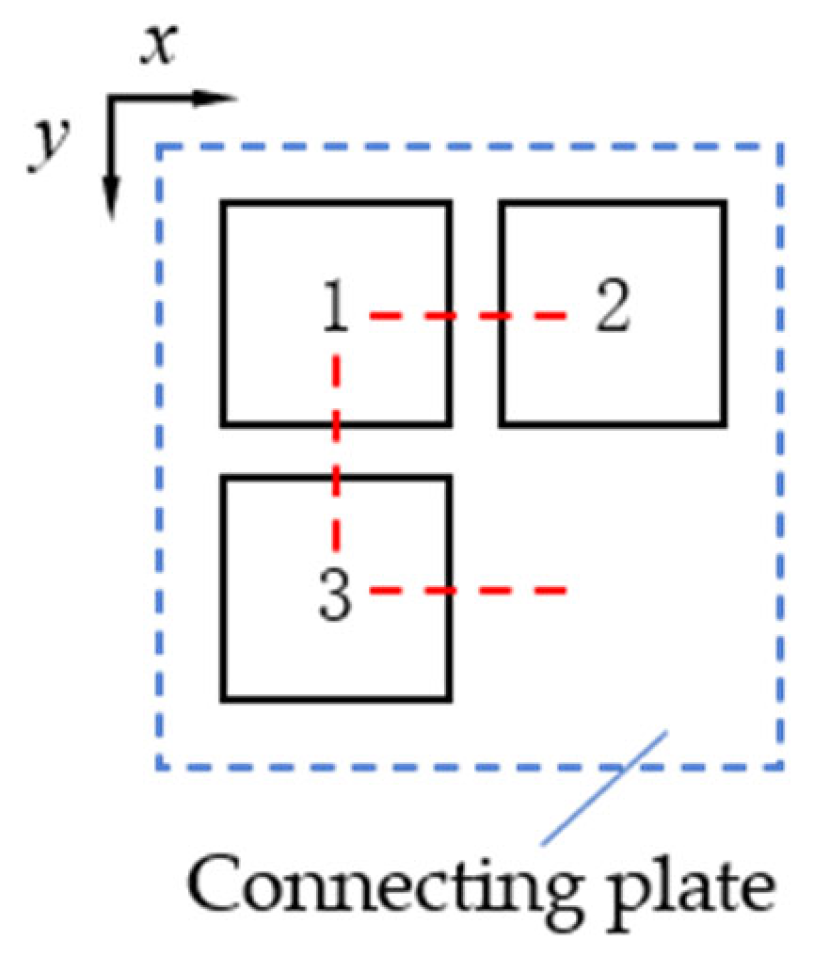
2.1. Configuration of Connection Nodes and Modules
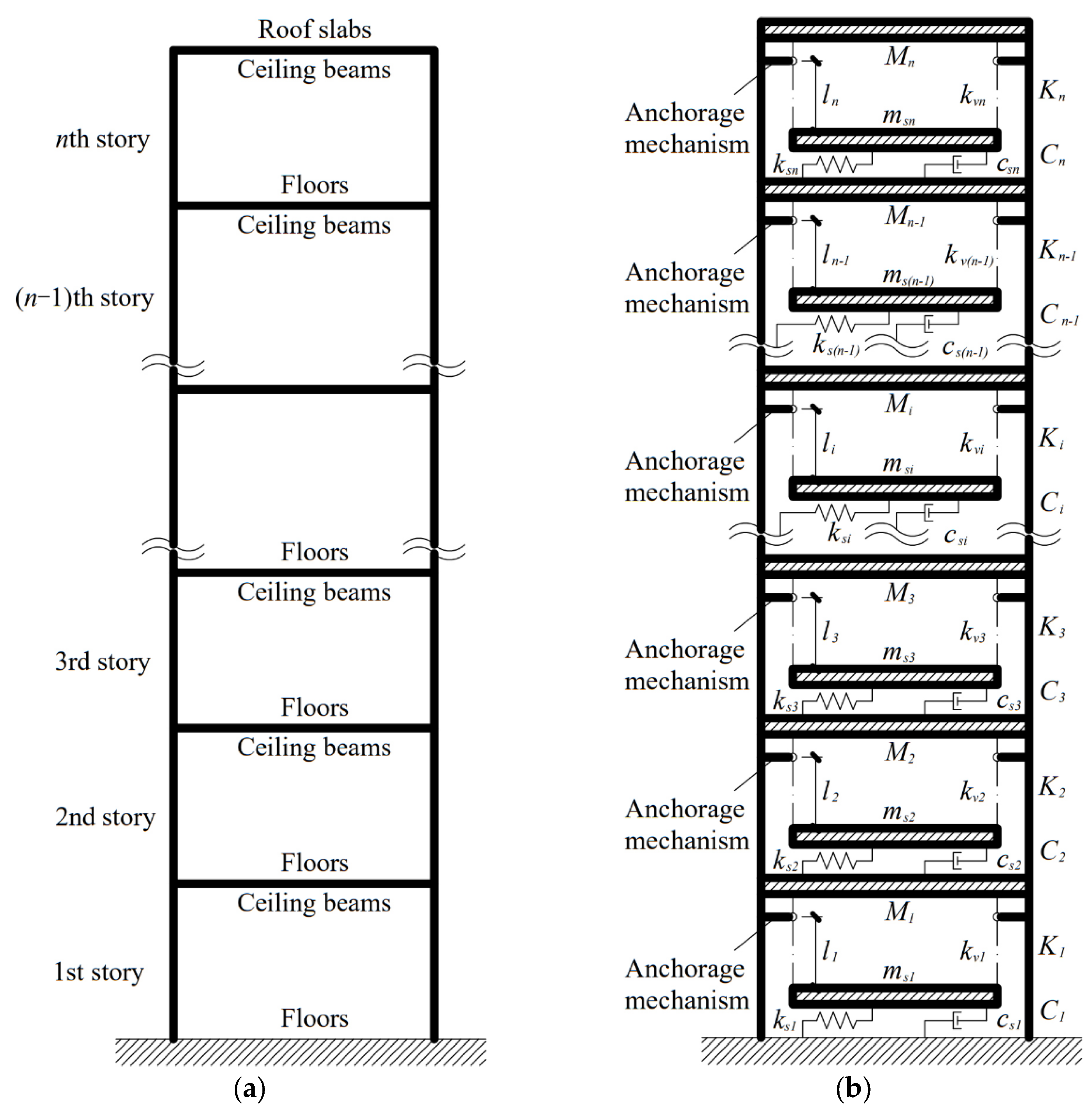
2.2. Structural Calculation Diagram
3. Motion Equation
3.1. Structure with the Swing-Suspended Floors
3.2. Structure with the Locked, Suspended Floors
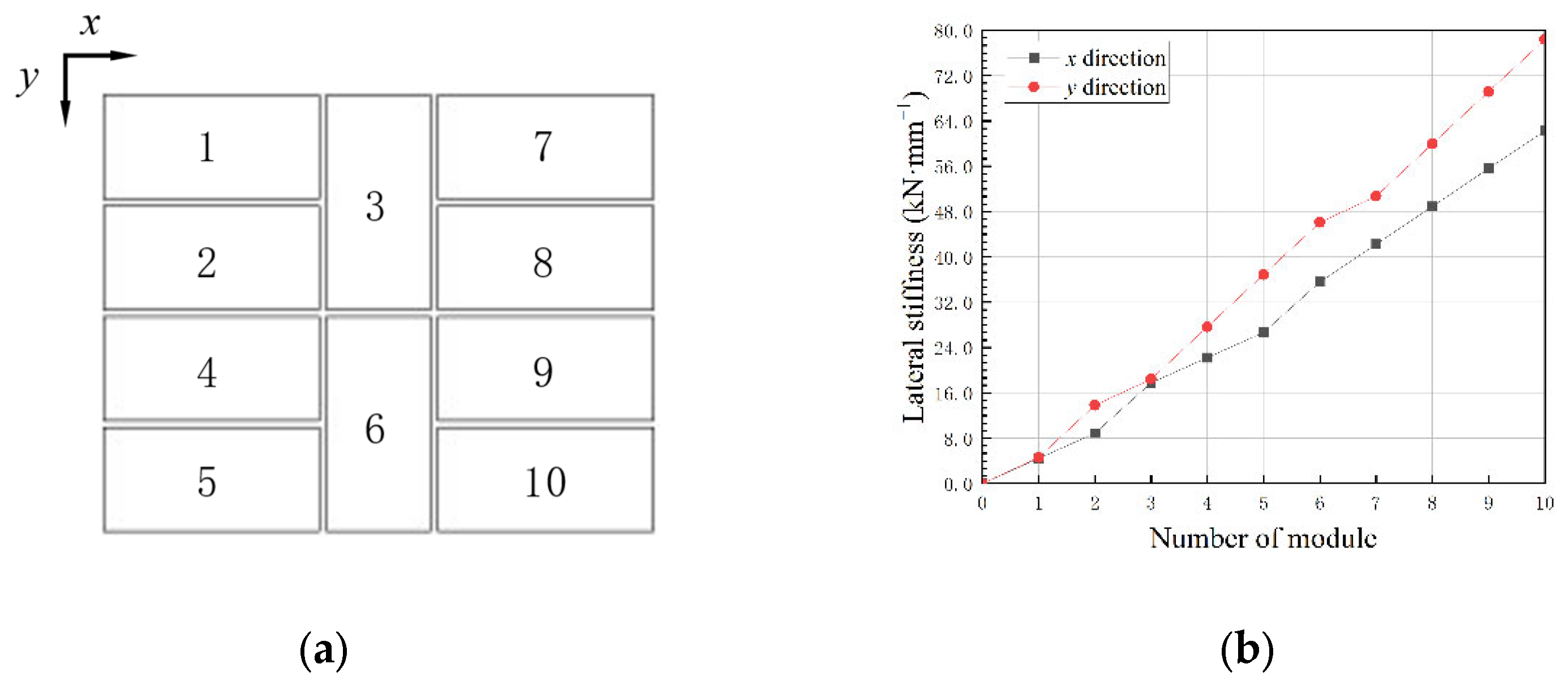
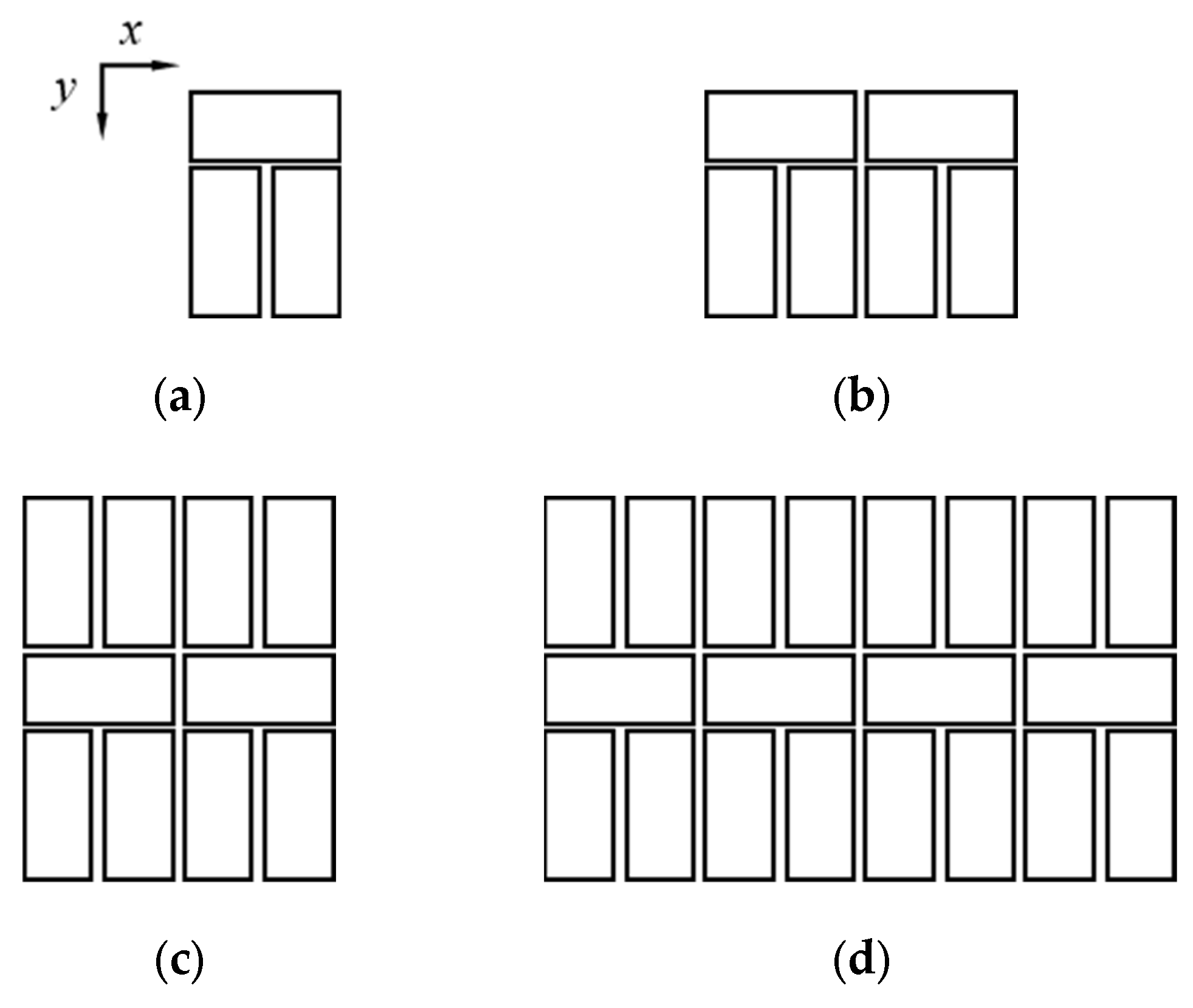
4. Effect of Increasing Modules
5. Optimal Frequency and Damping Ratios
5.1. Structural Parameters and Objective Functions
5.2. Optimal Parameters
6. Conclusions and Discussions
- The simplified lateral stiffness calculation method has good calculation accuracy, and the lateral stiffness of modular buildings increases linearly with the increase in the number of modules;
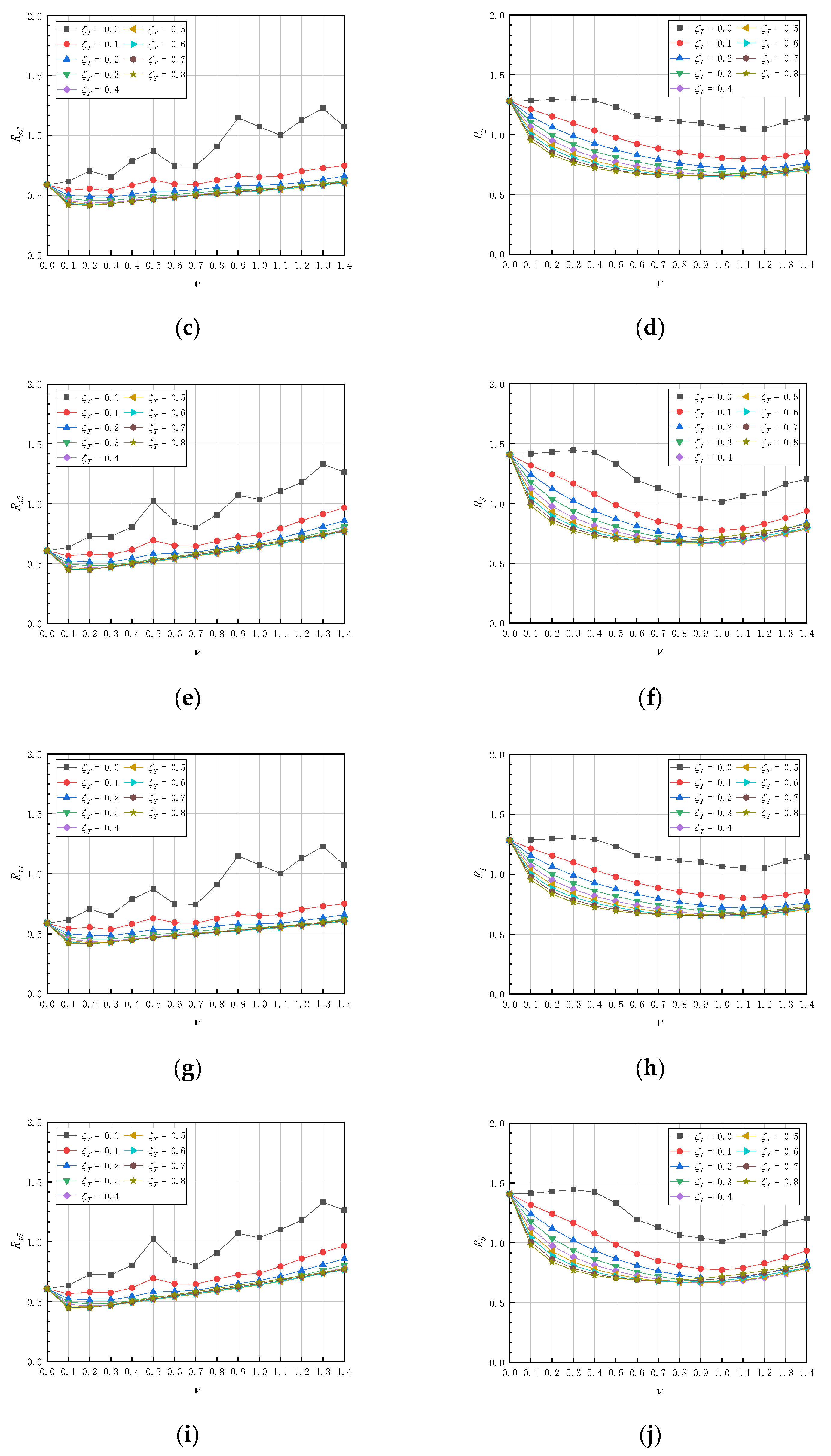
- Modular buildings with suspended floors are recommended to have different tuning frequency ratios depending on the vibration control objects;
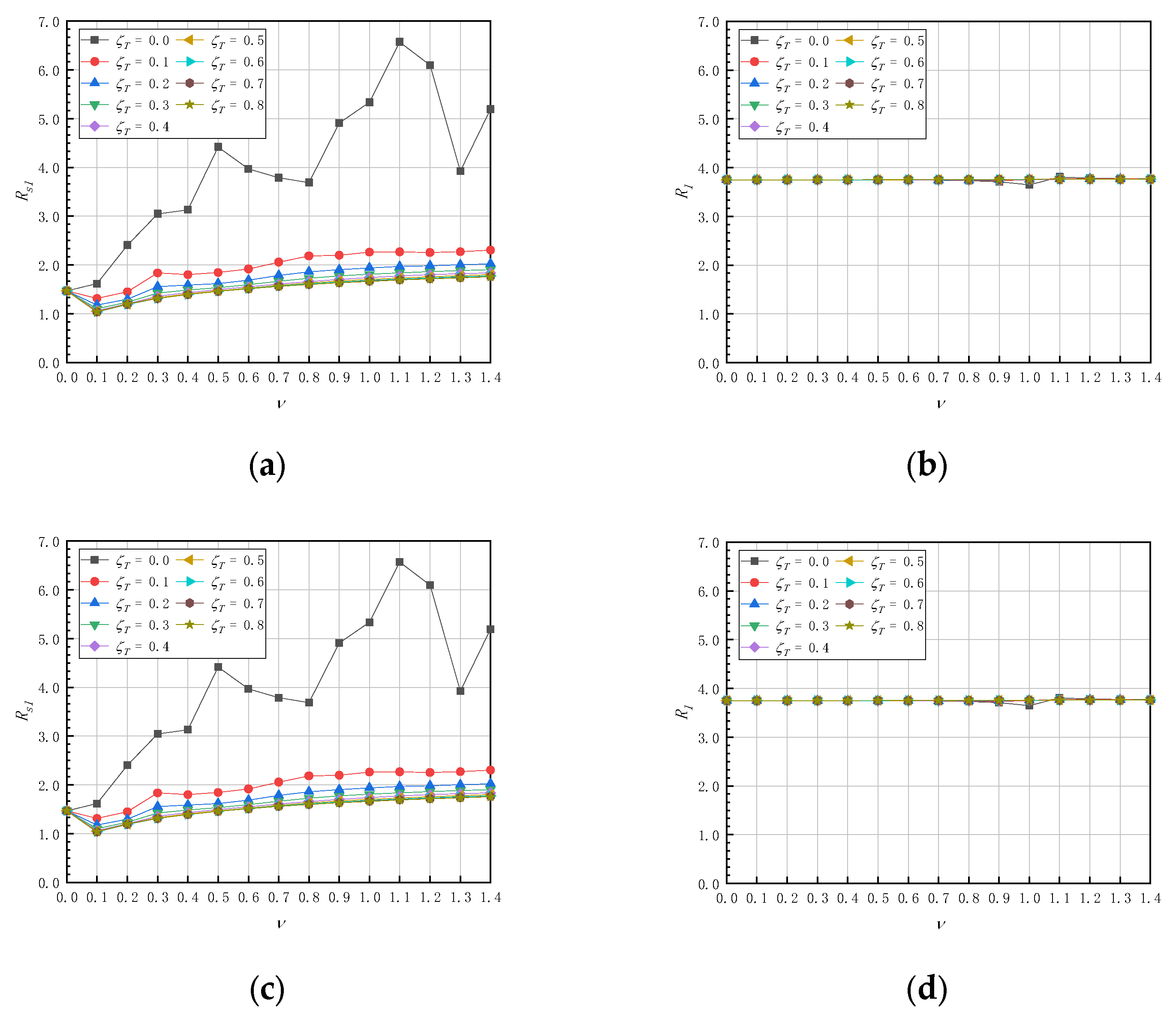
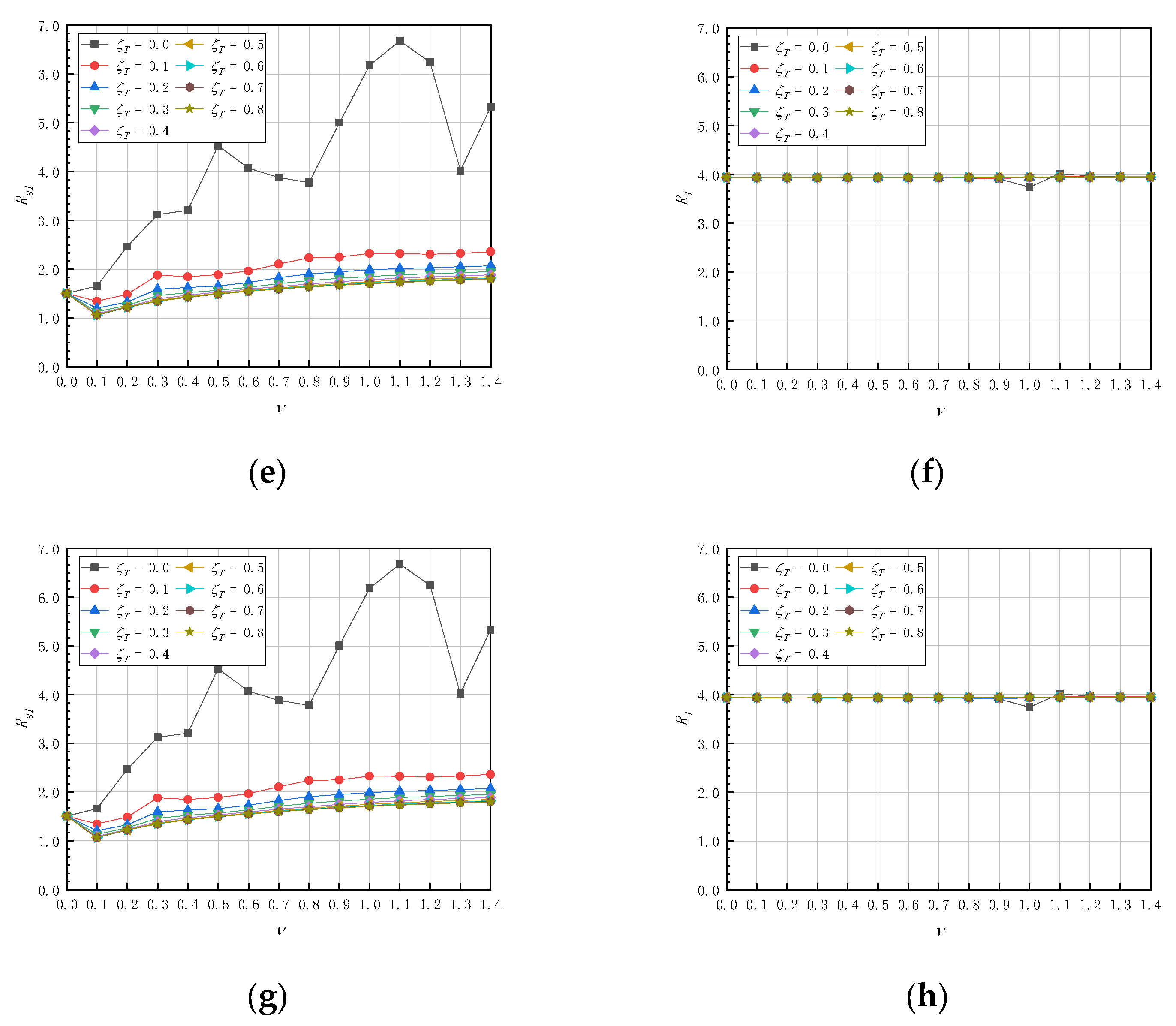
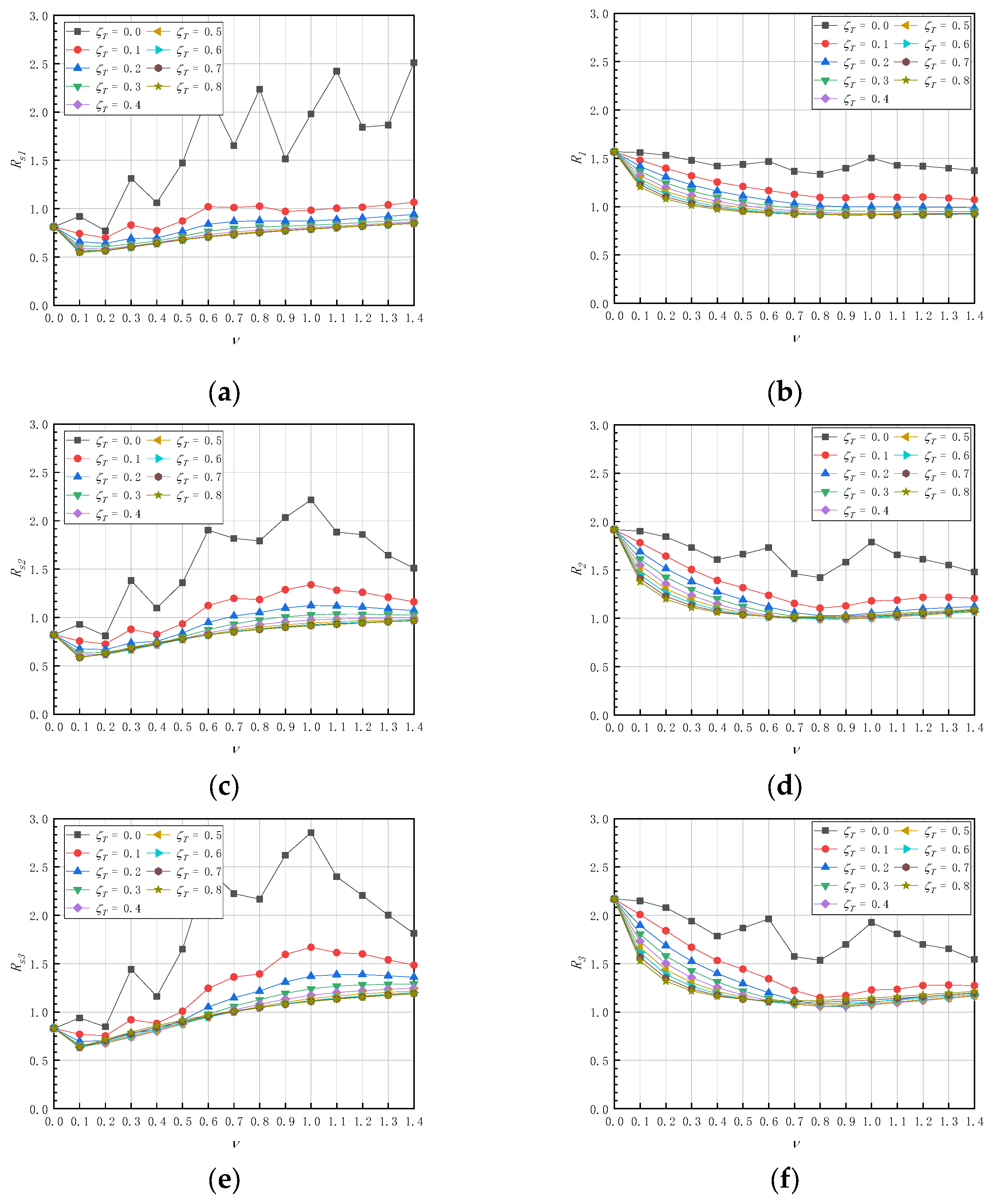
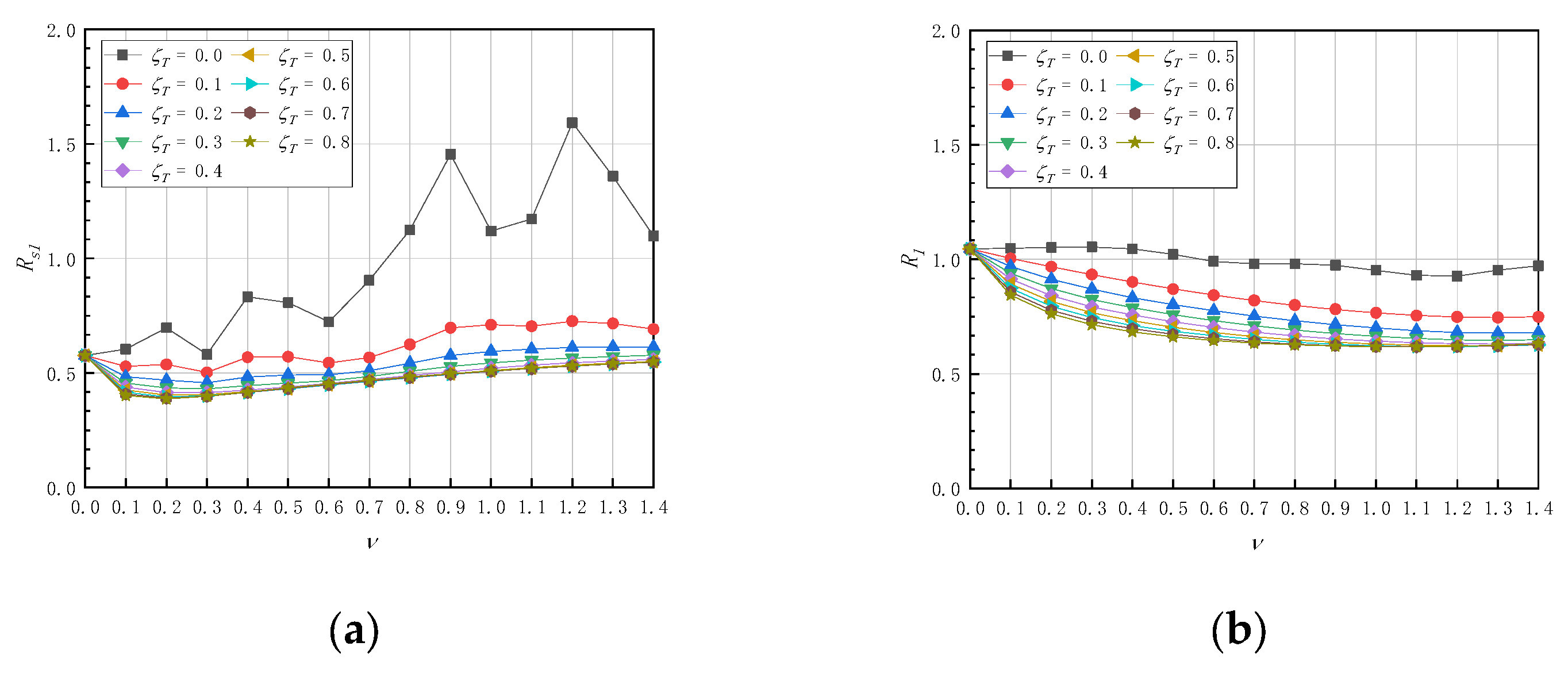
- To control the vibration of the substructure, the tuning ratio is recommended to be ν = 0.1~0.2. To minimize the response of the main structure, a ν = 0.8~1.0 is recommended;
- It is not necessary for the dampers’ initial stiffness to be very high for a modular structure with suspended floors. As a result, it is advised to utilize magnetorheological or viscous dampers of the velocity-dependent type, with a damping ratio of ζT = 0.5;
- However, there are some limitations to this study: (a) Although FIS vibration technology is used in this study, it is not modularized with the building, and only considers the case that the tuning frequency of each floor is the same. (b) The emphasis of this paper is only on the analysis of the structure. To make this system practical, a scheme concerning acoustic insulation, thermal insulation and other properties related to the building function needs to be researched. (c) This paper puts forward the concept of a modular building introduced by FIS, which is poorly considered in terms of economic benefits and practicability. (d) This paper only discusses the response of the structure under the excitation of white noise and needs to include cases experiencing small, medium and large earthquakes.
Author Contributions
Funding
Conflicts of Interest
References
- Li, A.Q.; Zhou, T.; Liao, Z.W. State of the art of modular building system. Ind. Constr. 2018, 48, 132–139+150. (In Chinese) [Google Scholar]
- Fathieh, A.; Mercan, O. Seismic evaluation of modular steel buildings. Eng. Struct. 2016, 122, 83–92. [Google Scholar] [CrossRef]
- Cho, B.H.; Lee, J.S.; Kim, H.; Kim, D.J. Structural performance of a new blind-bolted frame modular beam-column connection under lateral loading. Appl. Sci. 2019, 9, 1929. [Google Scholar] [CrossRef] [Green Version]
- Qiu, C.; Bai, Y.; Zhang, L.; Jin, L. Bending performance of splice connections for assembly of tubular section FRP members: Experimental and numerical study. J. Compos. Constr. 2019, 23, 04019040. [Google Scholar] [CrossRef]
- Sendanayake, S.V.; Thambiratnam, D.P.; Perera, N.; Chan, T.; Aghdamy, S. Seismic mitigation of steel modular building structures through innovative inter-modular connections. Heliyon 2019, 5, e02751. [Google Scholar] [CrossRef]
- Dai, X.M.; Zong, L.; Ding, Y.; Li, Z.X. Experimental study on seismic behavior of a novel plug-in self-lock joint for modular steel construction. Eng. Struct. 2019, 181, 143–164. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, Y.; Zhong, X.; Liu, J. Rotational stiffness of inter-module connection in mid-rise modular steel buildings. Eng. Struct. 2019, 196, 109273. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, J.; Liu, J.; Khan, K. Seismic behavior and moment transfer capacity of an innovative self-locking inter-module connection for modular steel building. Eng. Struct. 2021, 245, 112978. [Google Scholar] [CrossRef]
- Corfar, D.A.; Tsavdaridis, K.D. A comprehensive review and classification of inter-module connections for hot-rolled steel modular building systems. J. Build. Eng. 2022, 50, 104006. [Google Scholar] [CrossRef]
- Farajian, M.; Sharafi, P.; Eslamnia, H.; Kildashti, K.; Bai, Y. Classification of inter-modular connections for stiffness and strength in sway corner-supported steel modular frames. J. Constr. Steel Res. 2022, 197, 107458. [Google Scholar] [CrossRef]
- Peng, J.; Hou, C.; Shen, L. Numerical analysis of corner-supported composite modular buildings under wind actions. J. Constr. Steel Res. 2021, 187, 106942. [Google Scholar] [CrossRef]
- Sendanayake, S.V.; Thambiratnam, D.P.; Perera, N.J.; Chan, T.H.T.; Aghdamy, S. Enhancing the lateral performance of modular buildings through innovative inter-modular connections. In Structures; Elsevier: Amsterdam, The Netherlands, 2021; Volume 29, pp. 167–184. [Google Scholar]
- Shi, F.W.; Li, Y.M. Innovative inner sleeve composite bolted connections for modular steel constructions: Experimental and numerical studies. J. Build. Eng. 2022, 64, 105624. [Google Scholar] [CrossRef]
- Qin, J.; Tan, P. Design method of innovative box connections for modular steel constructions. J. Build. Eng. 2022, 57, 104820. [Google Scholar] [CrossRef]
- Sharafi, P.; Mortazavi, M.; Samali, B.; Ronagh, H. Interlocking system for enhancing the integrity of multi-storey modular buildings. Autom. Constr. 2018, 85, 263–272. [Google Scholar] [CrossRef]
- Xiang, P.; Nishitani, A. Seismic vibration control of building structures with multiple tuned mass damper floors integrated. Earthq. Eng. Struct. Dyn. 2014, 43, 909–925. [Google Scholar] [CrossRef]
- Xiang, P.; Nishitani, A. Optimum design of tuned mass damper floor system integrated into bending-shear type building based on H∞, H2, and stability maximization criteria. Struct. Control Health Monit. 2015, 22, 919–938. [Google Scholar] [CrossRef]
- Bin, P.; Tehrani, M.H.; Nisa, M.; Harvey, P.S., Jr.; Taflanidis, A.A. Analysis and optimization of a nonlinear dual-mode floor isolation system subjected to earthquake excitations. Earthq. Eng. Struct. Dyn. 2021, 50, 2334–2354. [Google Scholar] [CrossRef]
- Casagrande, L.; Villa, E.; Nespoli, A.; Occhiuzzi, A.; Bonati, A.; Auricchio, F. Innovative dampers as floor isolation systems for seismically-retrofit multi-storey critical facilities. Eng. Struct. 2019, 201, 109772. [Google Scholar] [CrossRef]
- Xiang, Y.; Koetaka, Y.; Okuda, N. Single-story steel structure with LVEM-isolated floor: Elastic seismic performance and design response spectrum. Eng. Struct. 2019, 196, 109314. [Google Scholar] [CrossRef]
- Xiang, Y.; Koetaka, Y. Structural feasibility of incorporating the LVEM-isolated floor in the first story of a two-story steel frame. Eng. Struct. 2019, 199, 109686. [Google Scholar] [CrossRef]
- Farajian, M.; Sharafi, P.; Alembagheri, M.; Kildashti, K.; Bigdeli, A. Effects of bolted connections’ properties on natural dynamic characteristics of corner-supported modular steel buildings. In Structures; Elsevier: Amsterdam, The Netherlands, 2022; Volume 45, pp. 1491–1515. [Google Scholar]
- Yang, C.; Xu, Y.C.; Ou, J.P. Fabricated steel modular column-column and beam-beam combination frame structure and its seismic performance analysis. Earthq. Eng. Eng. Dyn. 2022, 42, 34–45. (In Chinese) [Google Scholar]
- Cao, L.; Li, C. Tuned tandem mass dampers-inerters with broadband high effectiveness for structures under white noise base excitations. Struct. Control Health Monit. 2019, 36, e2319. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Schemes | Directions | Number of the Stiffness Enhancement Columns | Lateral Stiffness (N/mm) | |
|---|---|---|---|---|
| Finite Element Method | Equation (32) | |||
| Scheme 1 | x | 0 | 4447 | 4447 |
| y | 0 | 4612 | 4612 | |
| Scheme 2 | x | 4 | 13,409 | 13,341 |
| y | 0 | 9098 | 9224 | |
| Scheme 3 | x | 0 | 8771 | 8894 |
| y | 4 | 13,699 | 13,836 | |
| Scheme 4 | x | 0 | 13,097 | 13,341 |
| y | 8 | 22,716 | 23,060 | |
| Scheme 5 | x | 4 | 18,400 | 17,788 |
| y | 4 | 18,847 | 18,448 | |
| Scheme 6 | x | 4 | 17,880 | 17,788 |
| y | 4 | 18,058 | 18,448 | |
| Scheme 7 | x | 8 | 22,809 | 22,235 |
| y | 0 | 13,587 | 13,836 | |
| Tuning Frequency Ratio, Ν | Tuning Damping Ratio, Ζt | |||
|---|---|---|---|---|
| For the Main Structure | For the Substructure | For the Main Structure | For the Substructure | |
| This study | 0.8 to 1.0 | 0.1 to 0.2 | 0.5 | 0.5 |
| The literature [16] | 0.7 | — | 0.4 | — |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Q.; Zhang, S.; Shang, J. Dynamic Characteristic and Parameter Analysis of a Modular Building with Suspended Floors. Buildings 2023, 13, 7. https://doi.org/10.3390/buildings13010007
He Q, Zhang S, Shang J. Dynamic Characteristic and Parameter Analysis of a Modular Building with Suspended Floors. Buildings. 2023; 13(1):7. https://doi.org/10.3390/buildings13010007
Chicago/Turabian StyleHe, Qingguang, Shiquan Zhang, and Jiying Shang. 2023. "Dynamic Characteristic and Parameter Analysis of a Modular Building with Suspended Floors" Buildings 13, no. 1: 7. https://doi.org/10.3390/buildings13010007
APA StyleHe, Q., Zhang, S., & Shang, J. (2023). Dynamic Characteristic and Parameter Analysis of a Modular Building with Suspended Floors. Buildings, 13(1), 7. https://doi.org/10.3390/buildings13010007