
Comparison of Numerical Strategies for Historic Elevated Water Tanks: Modal Analysis of a 50-Year-Old Structure in Italy



Abstract
:1. Introduction
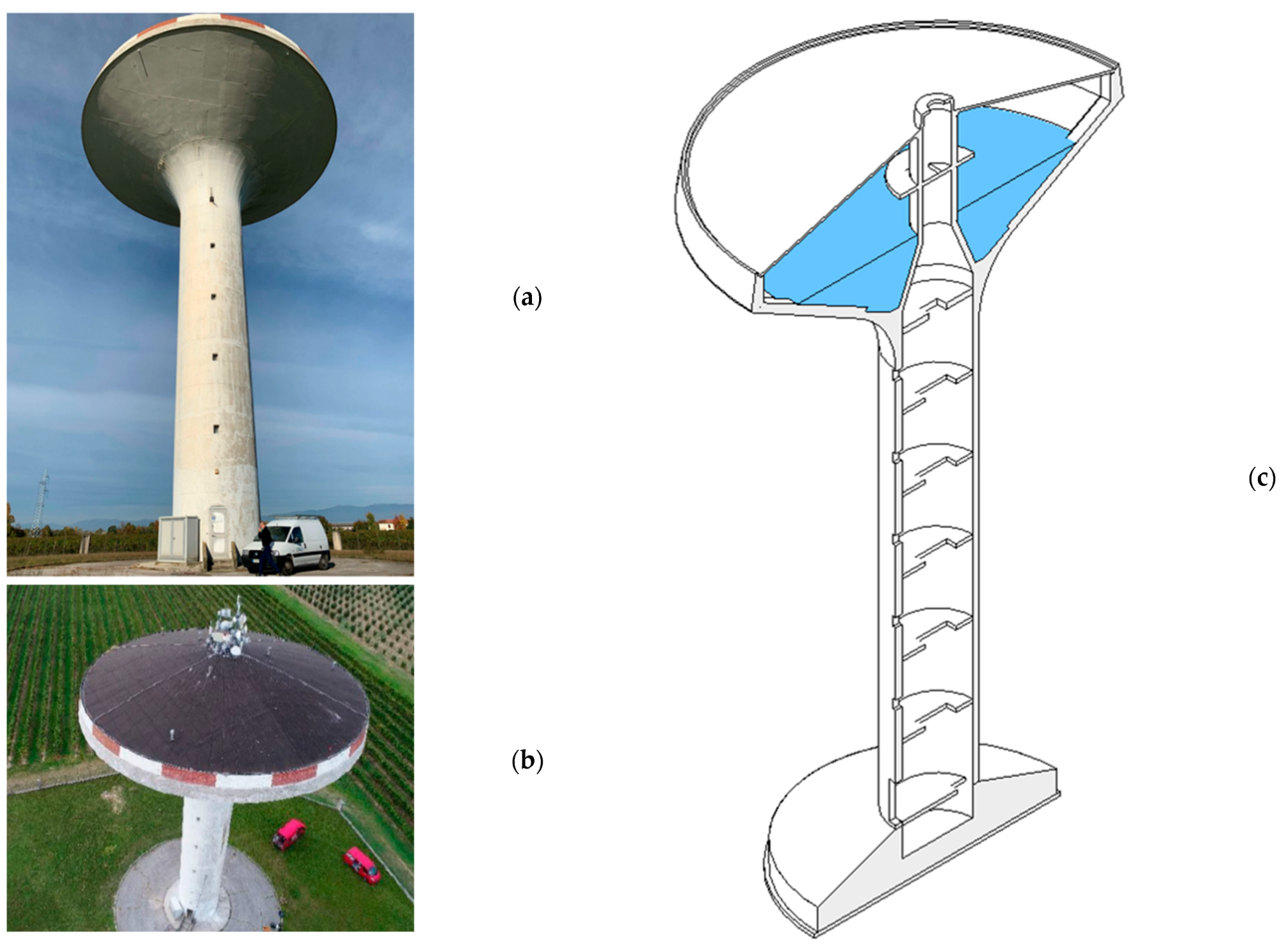
2. Case-Study Structural System
3. Background Experimental Investigation
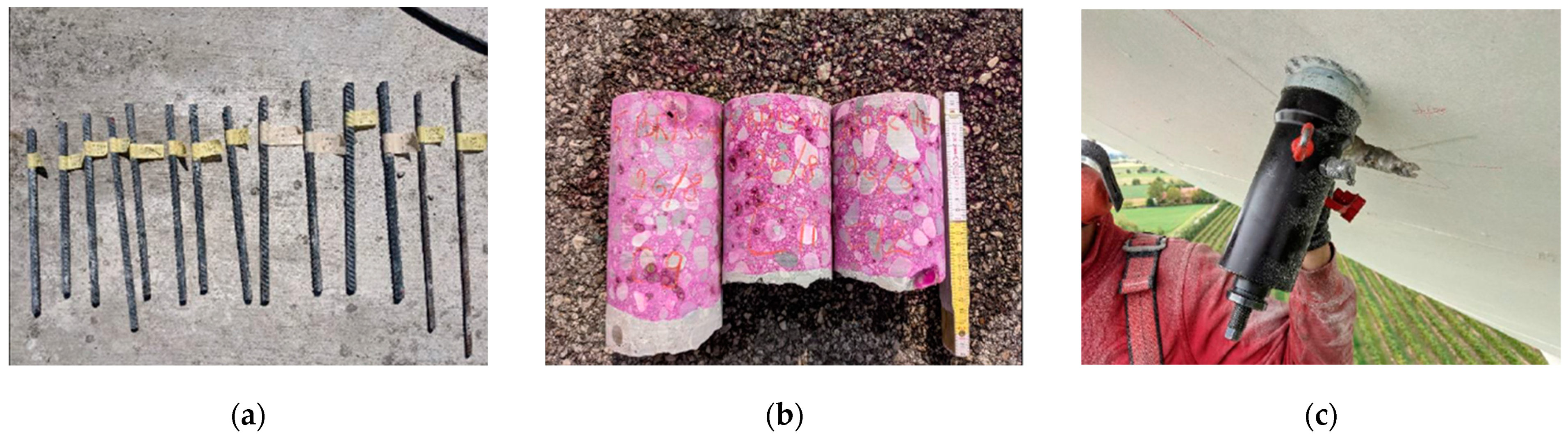
3.1. Characterisation of Material Properties
3.2. Vibration Tests
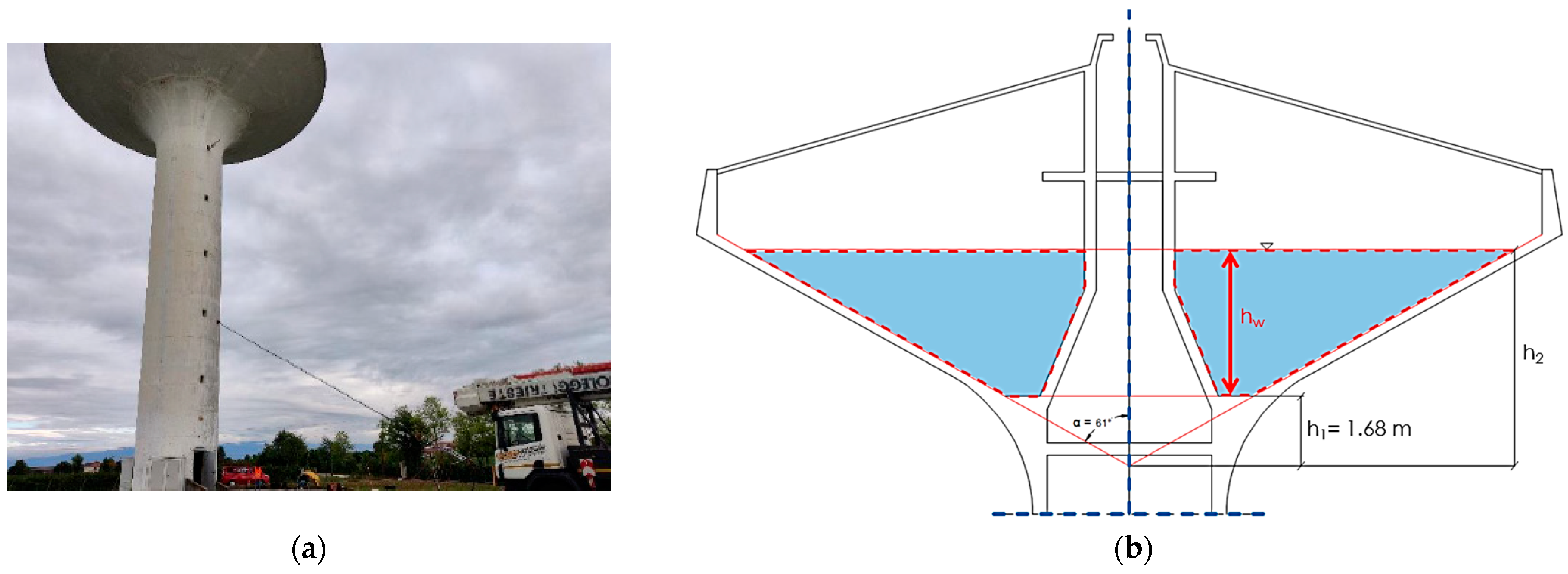
- the container in an empty condition (i.e., with Vw = 59 m3 of water, corresponding to hw = 1.37 m of free water surface in the container, “MCW0” in the following) or
- the half-full container (“MCW50” with Vw = 423 m3 and hw = 3.53 m).
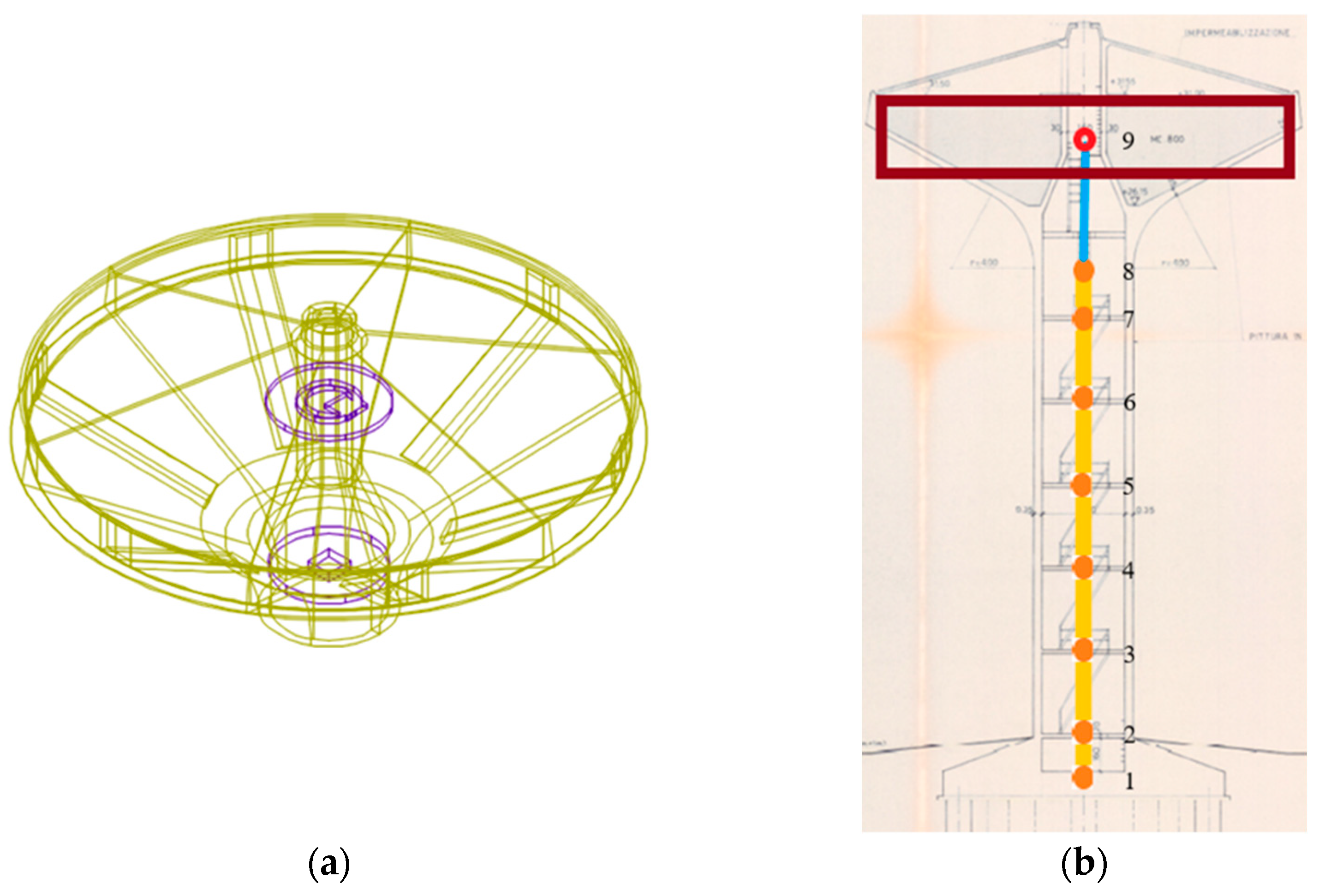
4. Present Numerical Investigation
4.1. Simplified Approach for EWT with Empty Container (M0 Model)
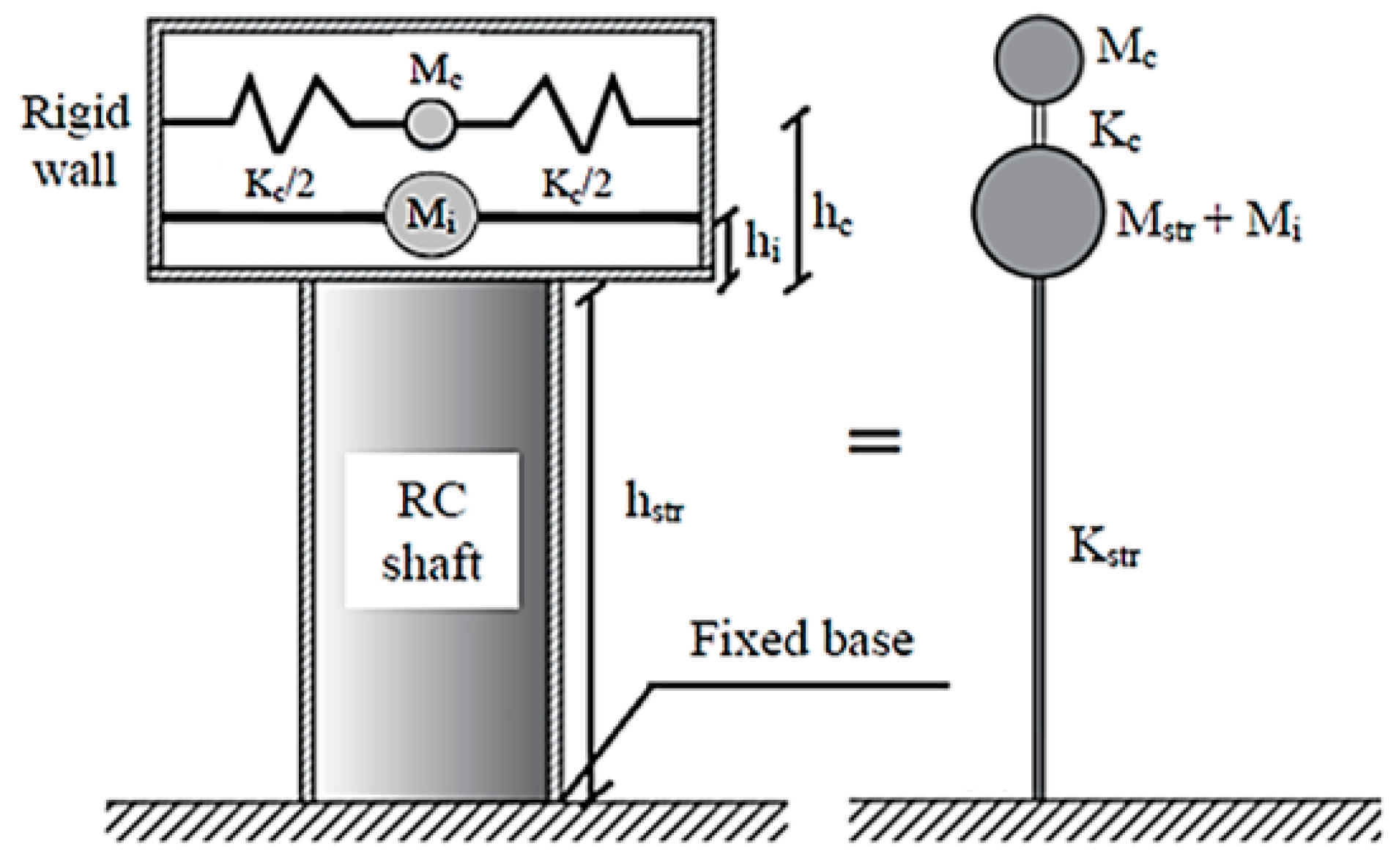
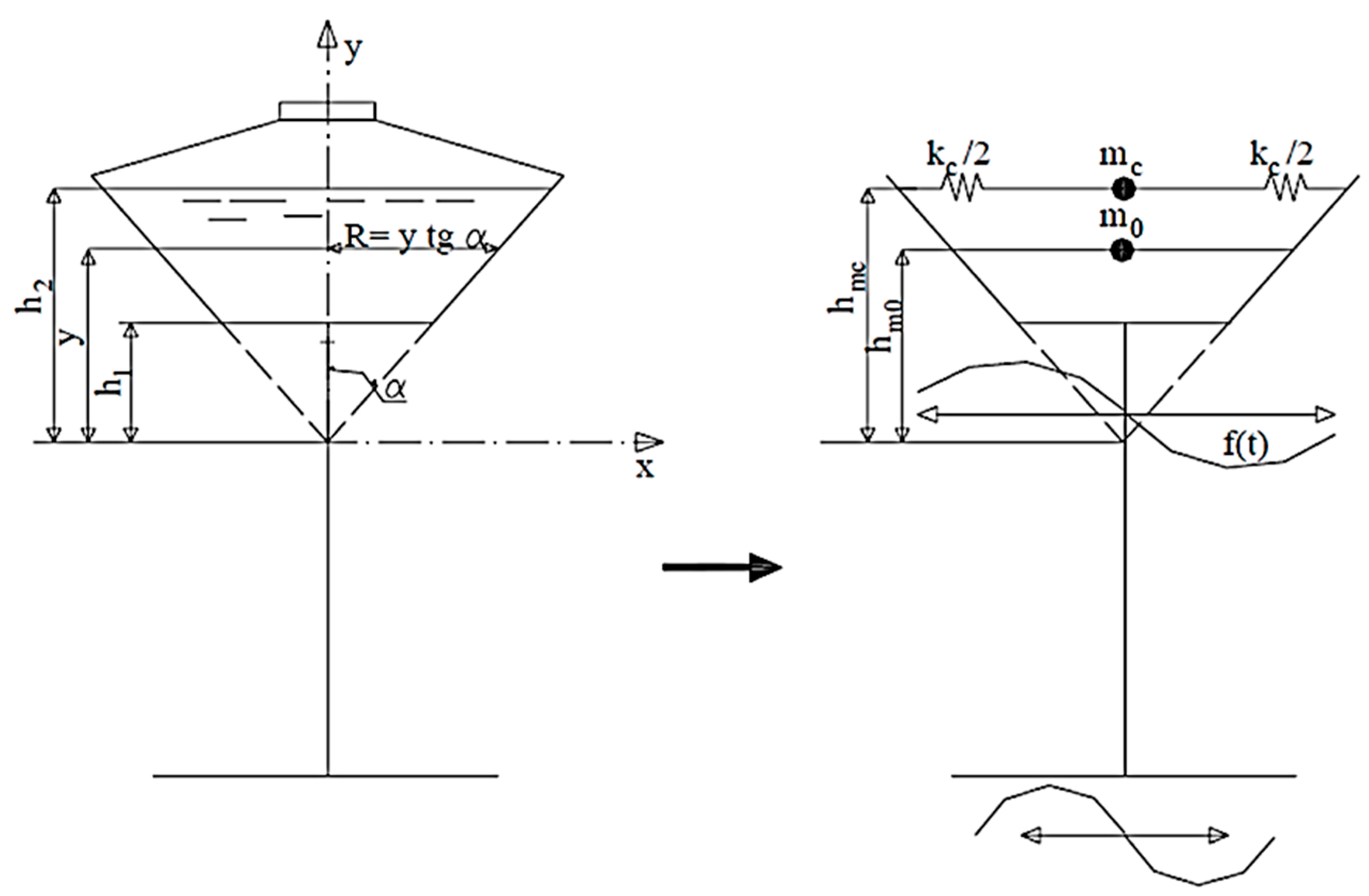
4.2. Simplified Approach to Account for FSI Phenomena (M1-DM and M1-DS Models)
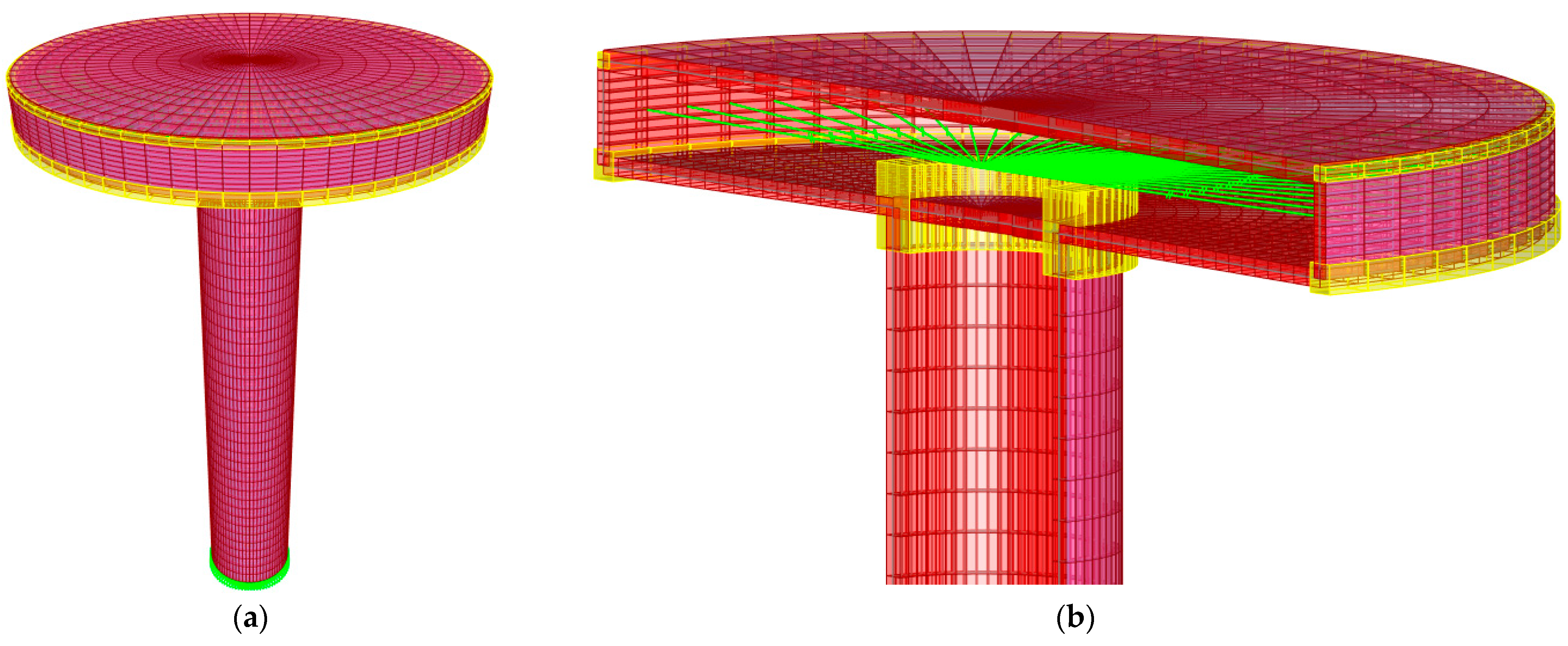
4.3. Acoustic Approach to Account for FSI Phenomena (M2 Model)
5. Discussion of Numerical Results
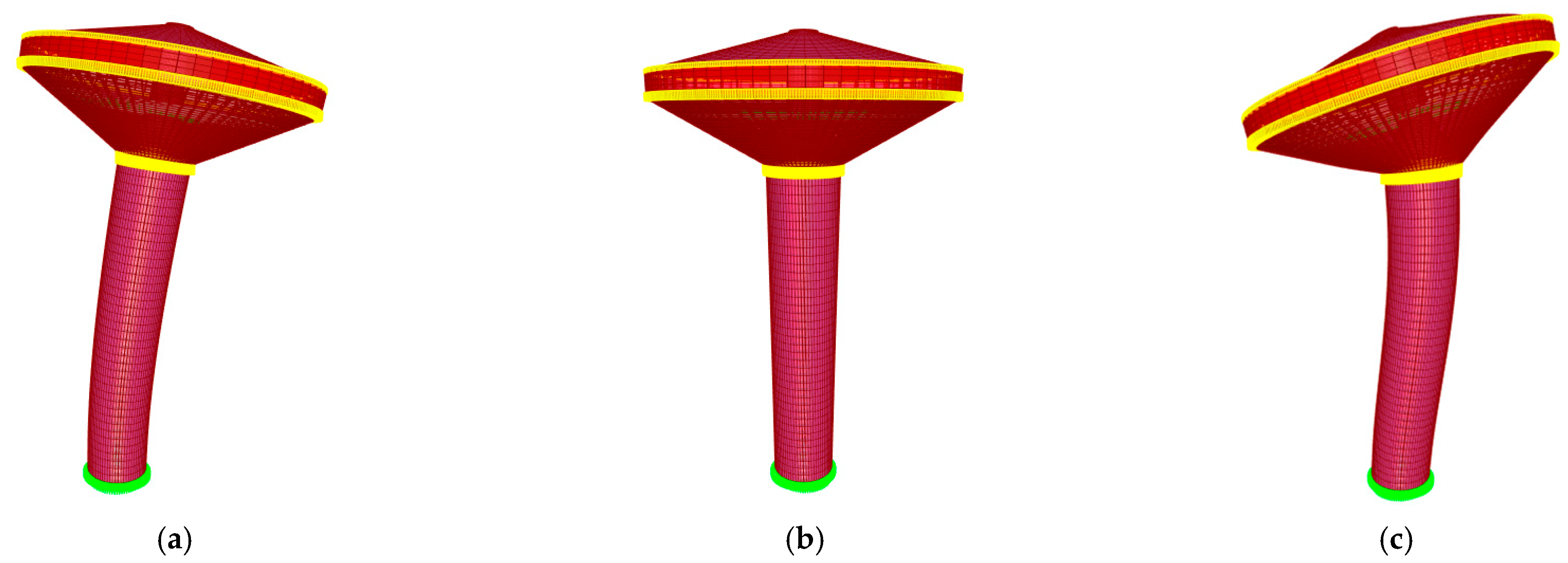
5.1. Modal Analysis of EWT with Empty Container
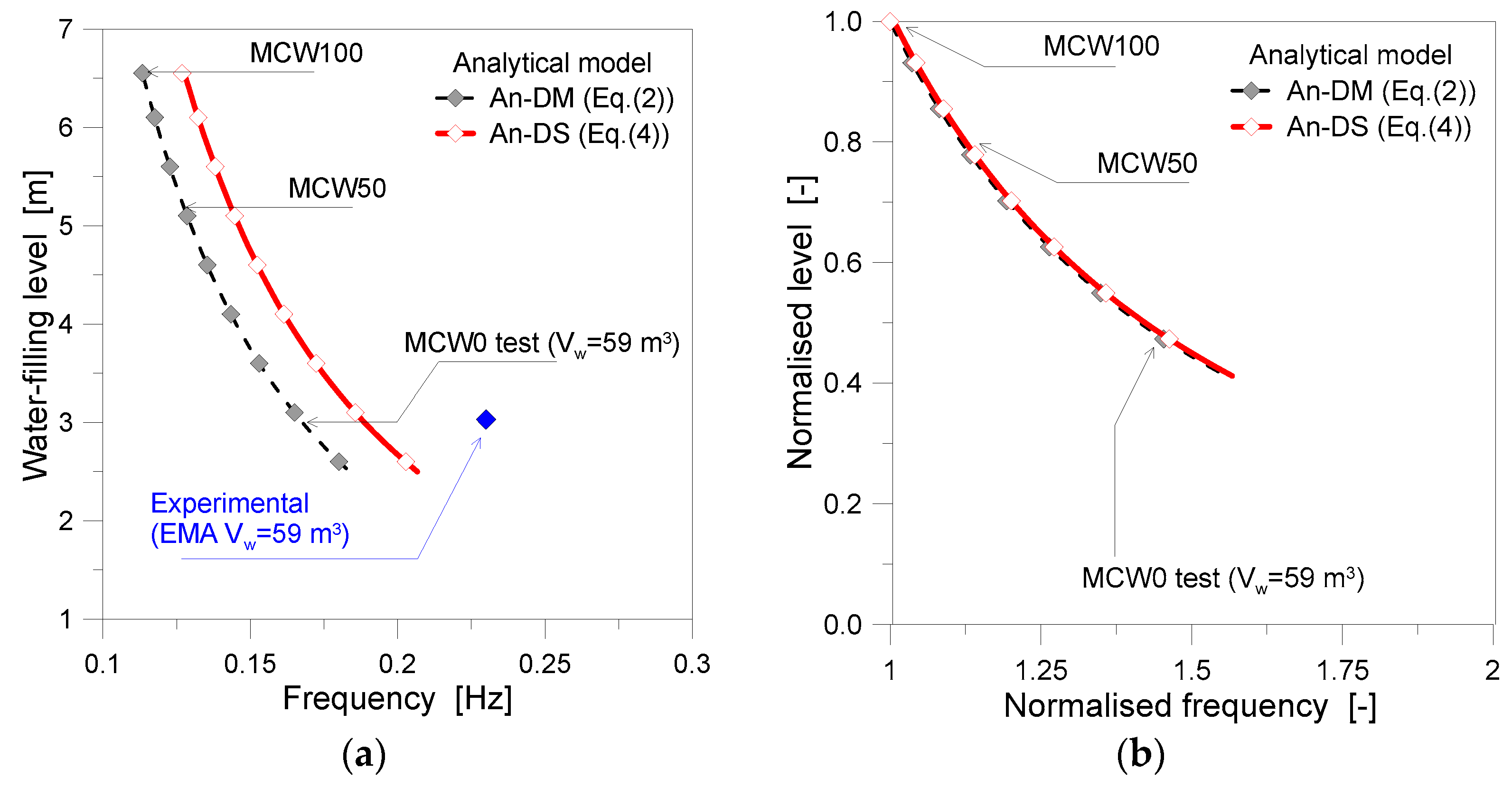
5.2. Frequency Analysis including FSI Phenomena
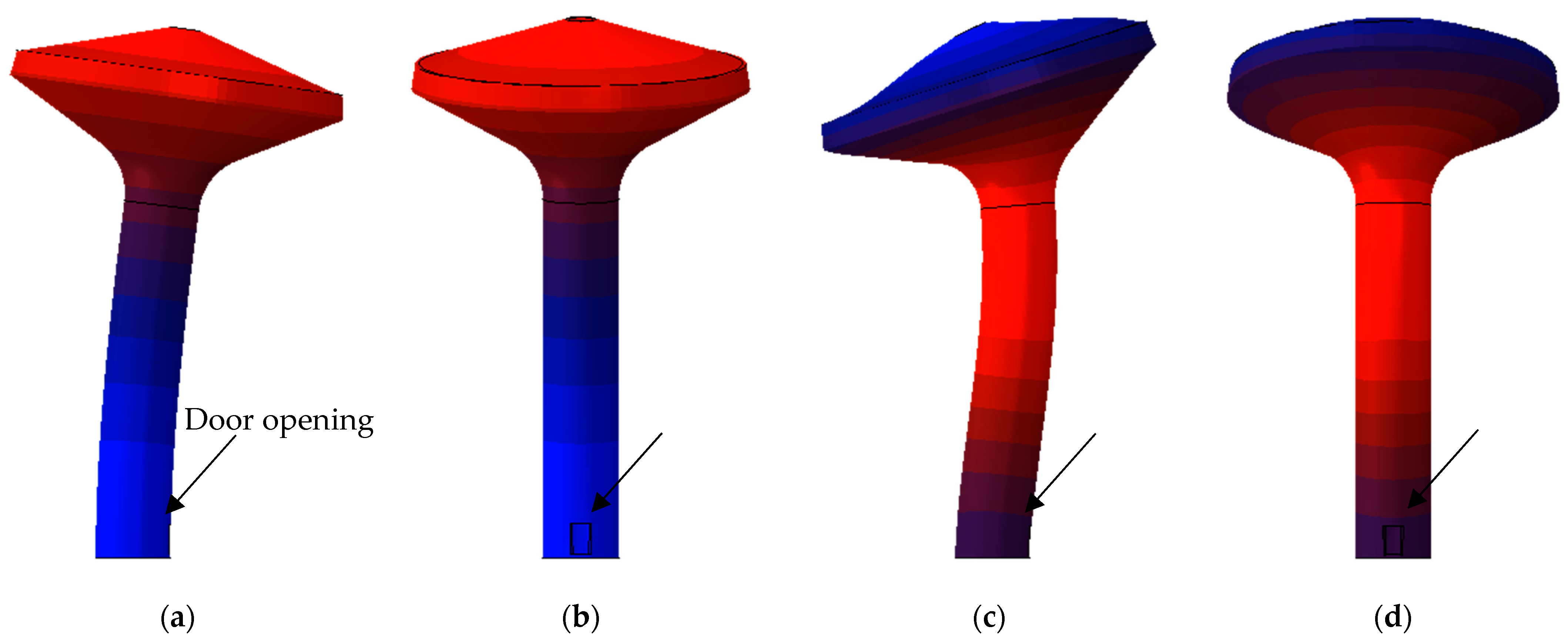
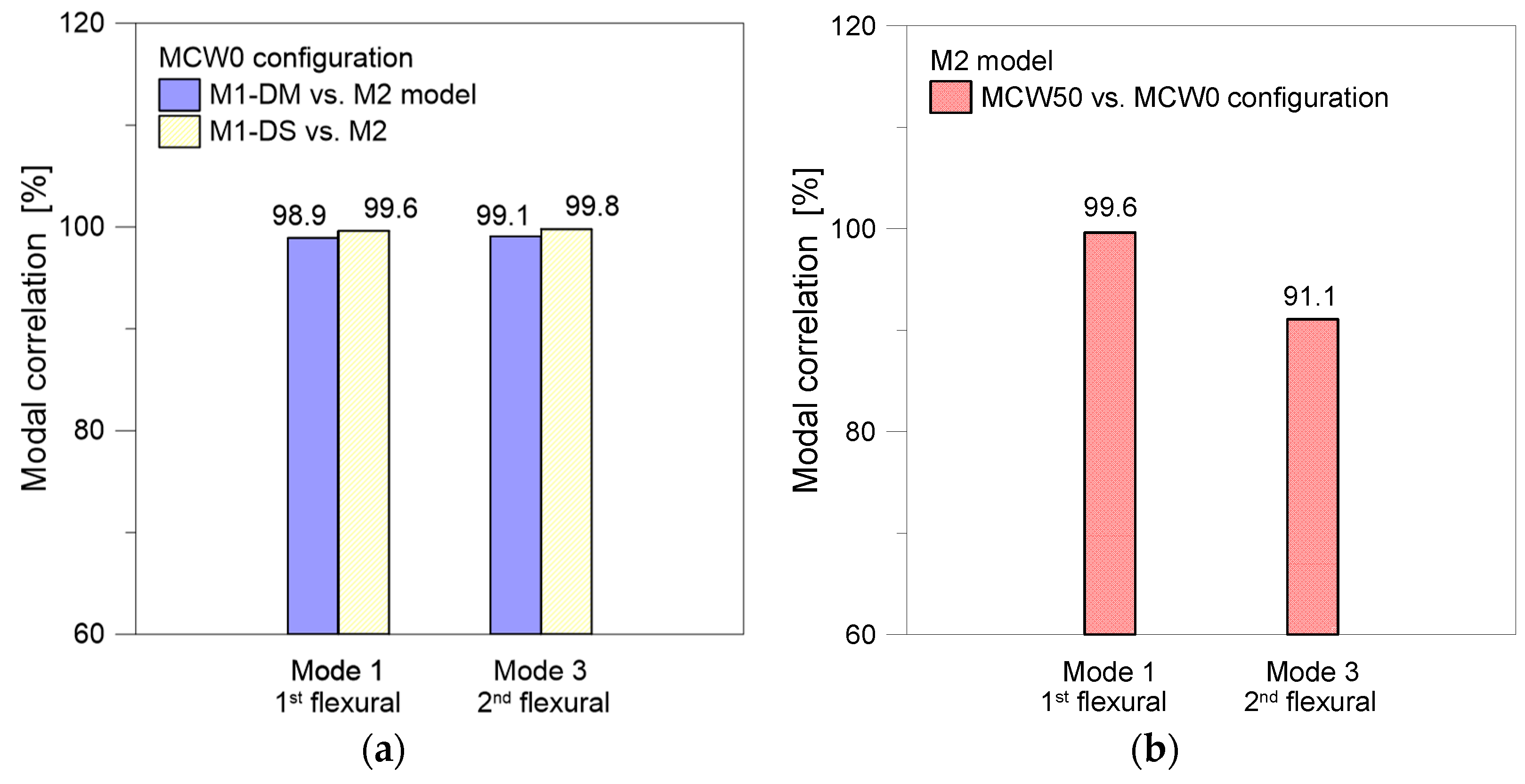
5.3. Modal Shape Analysis including FSI Phenomena
6. Summary and Conclusions
- The spring-mass simplified approaches based on Housner’s theory accounting for FSI phenomena (M1-DM and M1-DS models, in present study) can be somewhat efficient and accurate in vibration frequency estimates, especially for the first vibration mode. However, major uncertainties in dynamic features can arise in the higher vibration modes, both from FSI phenomena and from geometrical simplification of structural components, with possible discrepancies and additional uncertainties in the interpretation of predictions.
- For the acoustic-based strategy and geometrically refined description of structural components (M2 model), the best correlation was observed towards both experimental and analytical vibration frequencies. Additionally, further considerations were made possible in terms of modal correlation of corresponding vibration shapes, including FSI phenomena.
- For the empty container, the first vibration frequency was generally well captured by all developed models (including the M0 assembly), but the scatter for the second and third frequencies was found to decrease only with an increase of model complexity and computational cost.
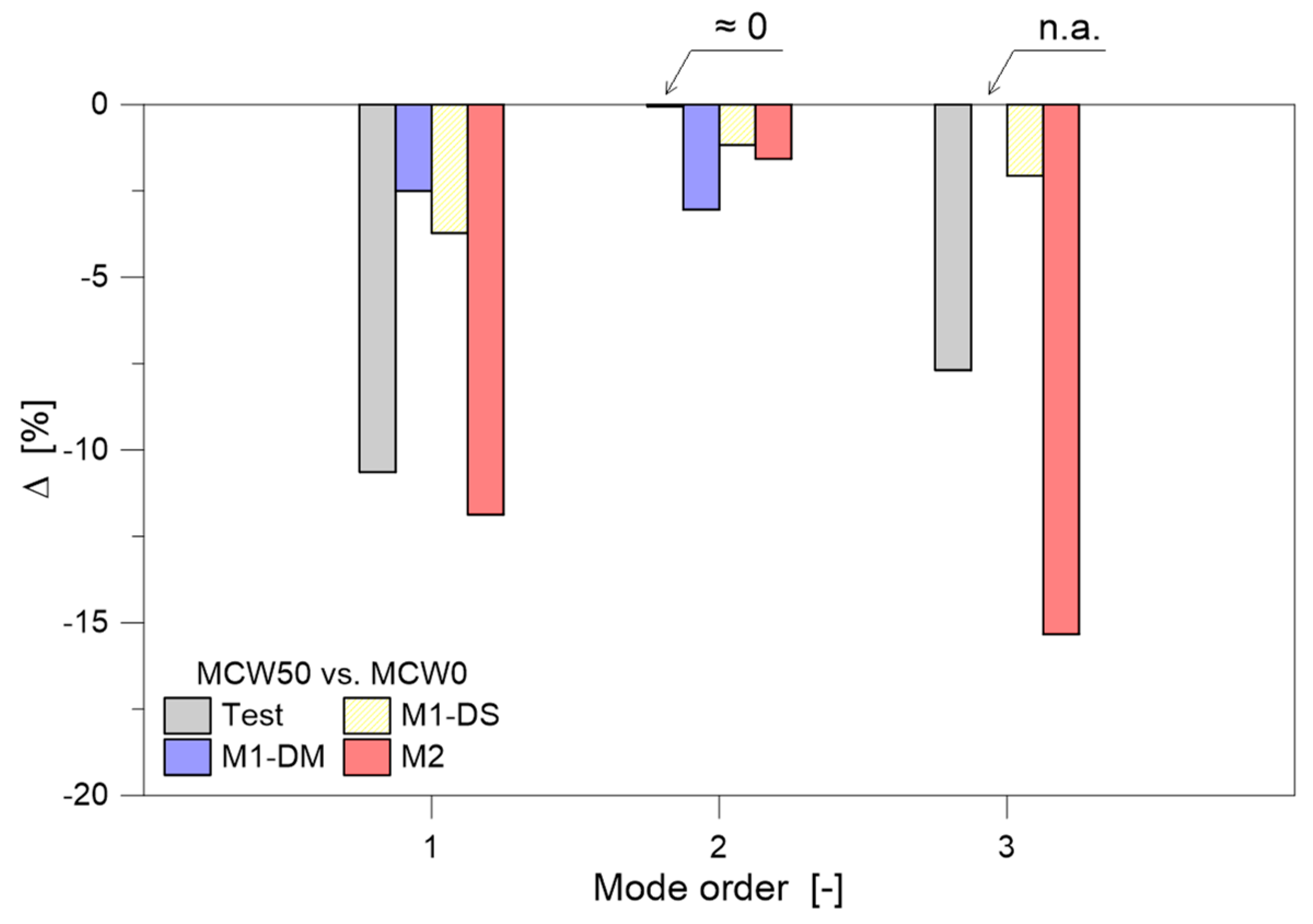
- For the structure with water-filled container, minimum variations were observed in terms of the first vibration frequency from M1-DM, M1-DS, or M2 models, but increasing scatter was progressively noted for the second and third frequencies, for the spring-mass based M1-DM and M1-DS formulations.
- The use of simplified M1-DM or M1-DS modelling strategies showed minimum modal shape sensitivity in empty conditions (>98% of the modal correlation coefficient), but major numerical issues in water-filled configurations.
- The acoustic-based M2 model, once used as a reference for modal correlation analysis, revealed that water infill has major effects on higher vibration modes (i.e., up to 10% for half-filled container), but minimum correlation sensitivity for the first vibration mode (99.6%).
- Consolidated analytical formulations from the literature, when used for the first vibration frequency prediction, showed a rather good agreement with M1-DM, M1-DS, or M2 numerical estimates, but a major scatter towards the experimental vibration frequency of the examined EWT (half-filled container).
- In this sense, the availability of in-field experimental tests is of utmost importance for the appropriate calibration and validation of numerical assemblies but should be possibly carried out by taking into account multiple operational conditions (i.e., water-filling levels) and a sufficient number/arrangement of instruments to reproduce the corresponding vibration shapes. In the present study, the scarce availability of experimental frequency data and the lack of corresponding modal shapes for the 50-year-old EWT represented a major gap for possible model updating.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chitte, C.J.; Charhate, S.; Mishra, S.S. Seismic performance of R.C. elevated water storage tanks. Mater. Today Proc. 2022, 65, 901–907. [Google Scholar] [CrossRef]
- Dilena, M.; Dell’Oste, M.F.; Gubana, A.; Morassi, A.; Polentarutti, F.; Puntel, E. Structural survey of old reinforced concrete elevated water tanks in an earthquake-prone area. Eng. Struct. 2021, 234, 111947. [Google Scholar] [CrossRef]
- Mori, C.; Sorace, S.; Terenzi, G. Seismic assessment and retrofit of two heritage-listed R/C elevated water storage tanks. Soil Dyn. Earthq. Eng. 2015, 77, 123–136. [Google Scholar] [CrossRef]
- Soroushnia, S.; Tafreshi, S.T.; Omidinasab, F.; Beheshtian, N.; Soroushnia, S. Seismic performance of RC elevated water tanks with frame staging and exhibition damage pattern. Procedia Eng. 2011, 14, 3076–3087. [Google Scholar] [CrossRef] [Green Version]
- Lopes, H.M.; Oliveira, C.S. Use of in-situ dynamic measurements to calibrate analytical models of RC-elevated water tanks. Shock Vib. 2012, 19, 903–914. [Google Scholar] [CrossRef]
- Sweedan, A.M.I.; El Damatty, A.A. Equivalent models of pure conical tanks under vertical ground excitation. J. Struct. Eng. 2005, 131, 725–733. [Google Scholar] [CrossRef]
- Anagha, B.V.; Nimisha, P.; Jayalekshmi, B.R. A study on effect of fluid on the modal characteristics of ground supported water tanks. IOP Conf. Ser. Mater. Sci. Eng. 2020, 936, 012027. [Google Scholar] [CrossRef]
- Nicolici, S.; Bilegan, R.M. Fluid structure interaction modeling of liquid sloshing phenomena in flexible tanks. Nucl. Eng. Des. 2013, 258, 51–56. [Google Scholar] [CrossRef]
- Mansour, A.M.; Kassem, M.M.; Nazri, F.M. Seismic vulnerability assessment of elevated water tanks with variable staging pattern incorporating the fluid-structure interaction. Structures 2021, 34, 61–77. [Google Scholar] [CrossRef]
- Martínez-Martín, F.J.; Yepes, V.; González-Vidosa, F.; Hospitaler, A.; Alcalá, J. Optimization Design of RC Elevated Water Tanks under Seismic Loads. Appl. Sci. 2022, 12, 5635. [Google Scholar] [CrossRef]
- Housner, G.W. Dynamic pressures on accelerated fluid containers. Bull. Seismol. Soc. Am. 1957, 47, 15–35. [Google Scholar] [CrossRef]
- Housner, G.W. Dynamic behavior of water tanks. Bull. Seismol. Soc. Am. 1963, 53, 381–387. [Google Scholar] [CrossRef]
- Bedon, C.; Dilena, M.; Morassi, A. Ambient vibration testing and structural identification of a cable-stayed bridge. Meccanica 2016, 51, 2777–2796. [Google Scholar] [CrossRef] [Green Version]
- Jhung, M.J.; Kang, S.-S. Fluid effect on the modal characteristics of a square tank. Nucl. Eng. Technol. 2019, 51, 1117–1131. [Google Scholar] [CrossRef]
- Amabili, M.; Pagnanelli, F.; Pellegrini, M. Experimental modal analysis of a water-filled circular cylindrical tank. Trans. Built Environ. 2001, 56, 267–276. [Google Scholar]
- Jhung, M.J.; Yu, S.O.; Lim, Y.T. Dynamic characteristics of a partially fluid-filled cylindrical shell. Nucl. Eng. Technol. 2011, 43, 167–174. [Google Scholar] [CrossRef] [Green Version]
- Livaoglu, R.; Dogangun, A. Simplified seismic analysis procedures for elevated tanks considering fluid-structure-soil interaction. J. Fluids Struct. 2006, 22, 421–439. [Google Scholar] [CrossRef]
- Virella, J.C.; Godoy, L.A.; Suarez, L.E. Fundamental modes of tank-liquid systems under horizontal motions. Eng. Struct. 2006, 28, 1450–1461. [Google Scholar] [CrossRef]
- Curadelli, O.; Ambrosini, D.; Mirasso, A.; Amani, M. Resonant frequencies in an elevated spherical container partially filled with water: FEM and measurement. J. Fluids Struct. 2010, 26, 148–159. [Google Scholar] [CrossRef]
- ACI 371R-98; Guide for Analysis, Design, and Construction of Concrete-Pedestal Water Tanks. American Concrete Institute: Farmington Hills, MI, USA, 1998.
- De Marco, R. Analisi Comportamentale e Sismica di un Serbatoio Pensile con Vasca Troncoconica di 800 mc: Studio Dell’interazione Acqua-Struttura; University of Trieste: Trieste, Italy, 2022. (In Italian) [Google Scholar]
- De Martino, G.; De Paola, F.; Giugni, M.; Fontana, N. Evaluation of hydrodynamic effects on elevated cone-shaped water tanks. In Fluid Structure Interaction and Moving Boundary Problems IV; Chakrabarti, S.K., Brebbia, C.A., Eds.; WIT Press: Southampton, UK, 2007; pp. 25–34. [Google Scholar]
- De Stefano, A. Sulla verifica antisismica approssimata dei serbatoi d’acqua tronco-conici in C.A. In Atti Dell’Istituto di Scienza delle Costruzioni; Politecnico di Torino: Torino, Italy, 1983. [Google Scholar]
- Consiglio Superiore dei Lavori Pubblici. Italian National Building Code “NTC 2018”; Italian Ministry of Infrastructure and Transportation: Rome, Italy, 2018. (In Italian)
- EN 12504-1:2019; Testing Concrete in Structures—Part 1: Cored Specimens—Taking, Examining and Testing in Compression. SIST: Ljubljana, Slovenia, 2019.
- EN 12504-2:2012; Testing Concrete in Structures—Part 2: NDT—Determination of Rebound Number. SIST: Ljubljana, Slovenia, 2012.
- EN 12504-4:2004; Testing Concrete—Part 4: Determination of Ultrasonic Pulse Velocity. SIST: Ljubljana, Slovenia, 2004.
- CSI. SAP2000—Integrated Software for Structural Analysis and Design, version 24.2.0; Computers and Structures Inc.: Berkeley, CA, USA, 2003. [Google Scholar]
- Simulia. ABAQUS—Computer Software and Online Documentation, version 6.14; Dassault Systems: Johnston, RI, USA, 2023. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rebars | Stirrups | |||
|---|---|---|---|---|
| Diameter [mm] | Spacing [cm] | Diameter [mm] | Spacing [cm] | |
| Shank | 16 | 30 | 12 | 20 |
| Container | 20 | 16 | 14 | 35 |
| Steel | Concrete | |||||
|---|---|---|---|---|---|---|
| N. Samples | fy [MPa] | fu [MPa] | fu/fy | N. Samples | fc [MPa] | |
| Stem—GL | 4 | 517.5 | 814.9 | 1.57 | 4 | 43.9 |
| Stem—3L | 6 | 529.5 | 822.7 | 1.55 | 4 | 45.9 |
| Stem—5L | 4 | 528.4 | 791.7 | 1.50 | 4 | 39.6 |
| Vibration Frequency [Hz] | ||||
|---|---|---|---|---|
| Mode | EMA (Free Decay) | |||
| Order | Type | MCW0 (Vw = 59 m3) | MCW50 (Vw = 423 m3) | Δ [%] |
| S1 | Sloshing | n.a. | 0.230 | n.a. |
| 1 | 1st flexural | 1.316 | 1.176 | −10.64 |
| 2 | Torsional | 3.448 | 3.446 | −0.06 |
| 3 | 2nd flexural | 8.333 | 7.692 | −7.69 |
| Numerical Model | ||||
|---|---|---|---|---|
| M0 | M1-DM | M1-DS | M2 | |
| Type of elements | Beam + shell | Beam + shell | Beam + shell | Solid |
| DOFs | 6500 | 35,854 | 87,708 | 419,301 |
| Container | Equivalent plate (shell) | Equivalent cylinder (beam + shell) | Truncated cone (beam + shell) | Truncated cone (solid) |
| Shank | Empty cylinder, no shank door (beam) | Empty cylinder, no shank door (shell) | Empty cylinder, no shank door (shell) | Cylinder + door opening + diaphragms (solid) |
| Structural symmetry | Yes | Yes | Yes | No |
| FSI phenomena | Not available | Spring + Mass system | Spring + Mass system | Acoustic solid elements (>DOFs) |
| Vibration Frequency [Hz] | ||||
|---|---|---|---|---|
| Mode | Experimental | Numerical | ||
| Order | Type | EMA (MCW0) | M0 Model (Empty) | Δ [%] |
| 1 | 1st flexural | 1.316 | 1.299 | −1.29 |
| 2 | Torsional | 3.448 | 2.703 | −21.61 |
| 3 | 2nd flexural | 8.333 | 7.143 | −14.28 |
| Vibration Frequency [Hz] | ||||||||
|---|---|---|---|---|---|---|---|---|
| Mode | Experimental | Numerical | ||||||
| Order | Type | EMA | M1-DM | Δ [%] | M1-DS | Δ [%] | M2 | Δ [%] |
| 1 | 1st flexural | 1.316 | 1.282 | −2.58 | 1.316 | ≈0 | 1.399 | 0.99 |
| 2 | Torsional | 3.448 | 3.125 | −9.37 | 3.333 | −3.34 | 3.567 | 3.45 |
| 3 | 2nd flexural | 8.333 | 5.882 | −29.41 | 7.143 | −14.28 | 7.529 | −9.65 |
| Vibration Frequency [Hz] | ||||||||
|---|---|---|---|---|---|---|---|---|
| Mode | Experimental | Numerical | ||||||
| Order | Type | EMA | M1-DM | Δ [%] | M1-DS | Δ [%] | M2 | Δ [%] |
| 1 | 1st flexural | 1.176 | 1.205 | 2.50 | 1.267 | 7.74 | 1.233 | 4.85 |
| 2 | Torsional | 3.446 | 2.917 | −15.35 | 3.294 | −4.41 | 3.511 | 1.89 |
| 3 | 2nd flexural | 7.692 | n.a. | n.a. | 6.996 | −9.05 | 6.375 | −17.12 |
| Vibration Frequency [Hz] | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Mode | M1-DM | M1-DS | M2 | ||||||
| Order | MCW0 | MCW50 | Δ [%] | MCW0 | MCW50 | Δ [%] | MCW0 | MCW50 | Δ [%] |
| 1 | 1.282 | 1.205 | −2.50 | 1.316 | 1.267 | −3.72 | 1.399 | 1.233 | −11.87 |
| 2 | 3.125 | 2.917 | −3.04 | 3.333 | 3.294 | −1.17 | 3.567 | 3.511 | −1.57 |
| 3 | 5.882 | n.a. | n.a. | 7.143 | 6.996 | −2.06 | 7.529 | 6.375 | −15.33 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bedon, C.; Amadio, C.; Fasan, M.; Bomben, L. Comparison of Numerical Strategies for Historic Elevated Water Tanks: Modal Analysis of a 50-Year-Old Structure in Italy. Buildings 2023, 13, 1414. https://doi.org/10.3390/buildings13061414
Bedon C, Amadio C, Fasan M, Bomben L. Comparison of Numerical Strategies for Historic Elevated Water Tanks: Modal Analysis of a 50-Year-Old Structure in Italy. Buildings. 2023; 13(6):1414. https://doi.org/10.3390/buildings13061414
Chicago/Turabian StyleBedon, Chiara, Claudio Amadio, Marco Fasan, and Luca Bomben. 2023. "Comparison of Numerical Strategies for Historic Elevated Water Tanks: Modal Analysis of a 50-Year-Old Structure in Italy" Buildings 13, no. 6: 1414. https://doi.org/10.3390/buildings13061414