
Numerical Simulation Study on Evolution Process of Carrying-Soil Effect of Rectangular Pipe Jacking




Abstract
:1. Introduction
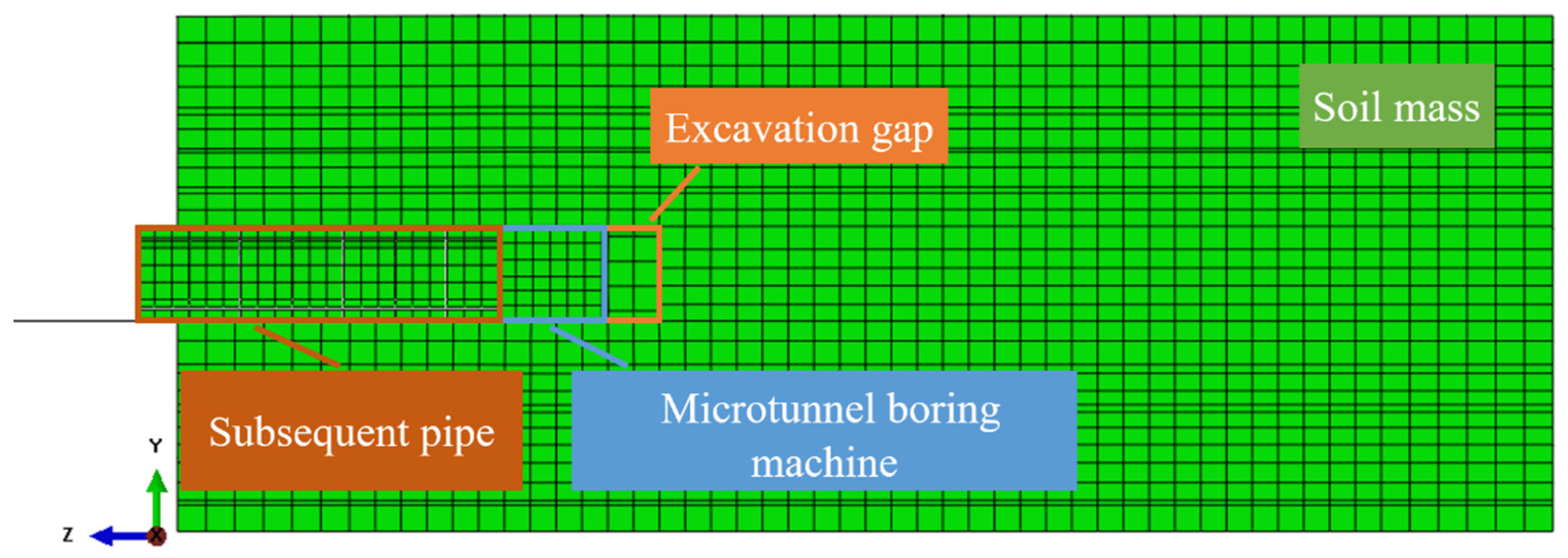
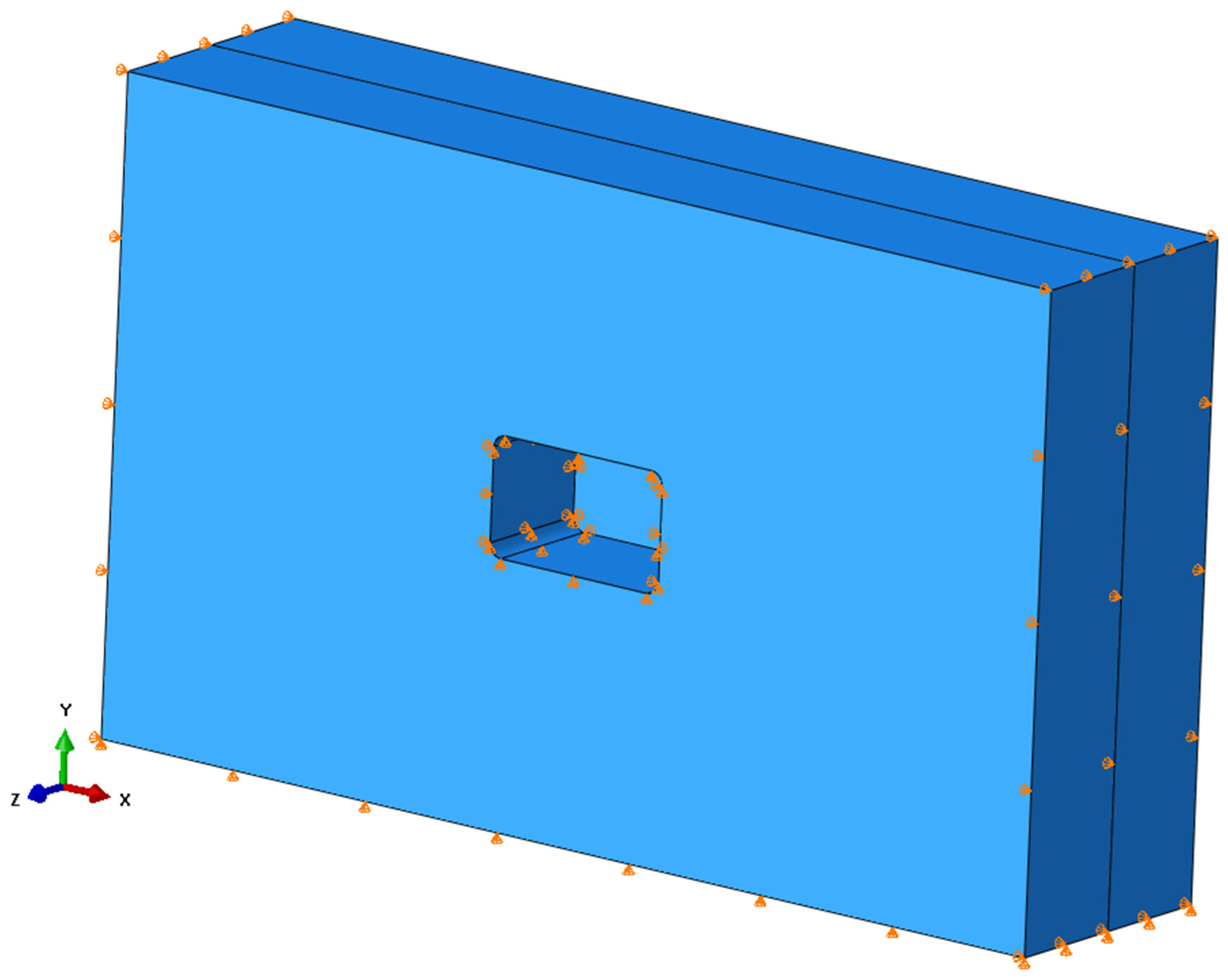
2. Establishment of Numerical Model
2.1. Project Profile
2.2. Basic Assumptions
- ①
- When modeling the soil, the soil is assumed to be isotropic material and simplified as an ideal elastic–plastic material. We ignore the initial ground stress of the soil, regardless of groundwater disturbance to the soil, soil drainage consolidation, slurry seepage consolidation, and other factors.
- ②
- The construction process of rectangular pipe jacking is regarded as continuous straight jacking, ignoring the dynamic effect of nonlinear changes in incremental step length on soil deformation, and ignoring the time effect of the jacking process.
- ③
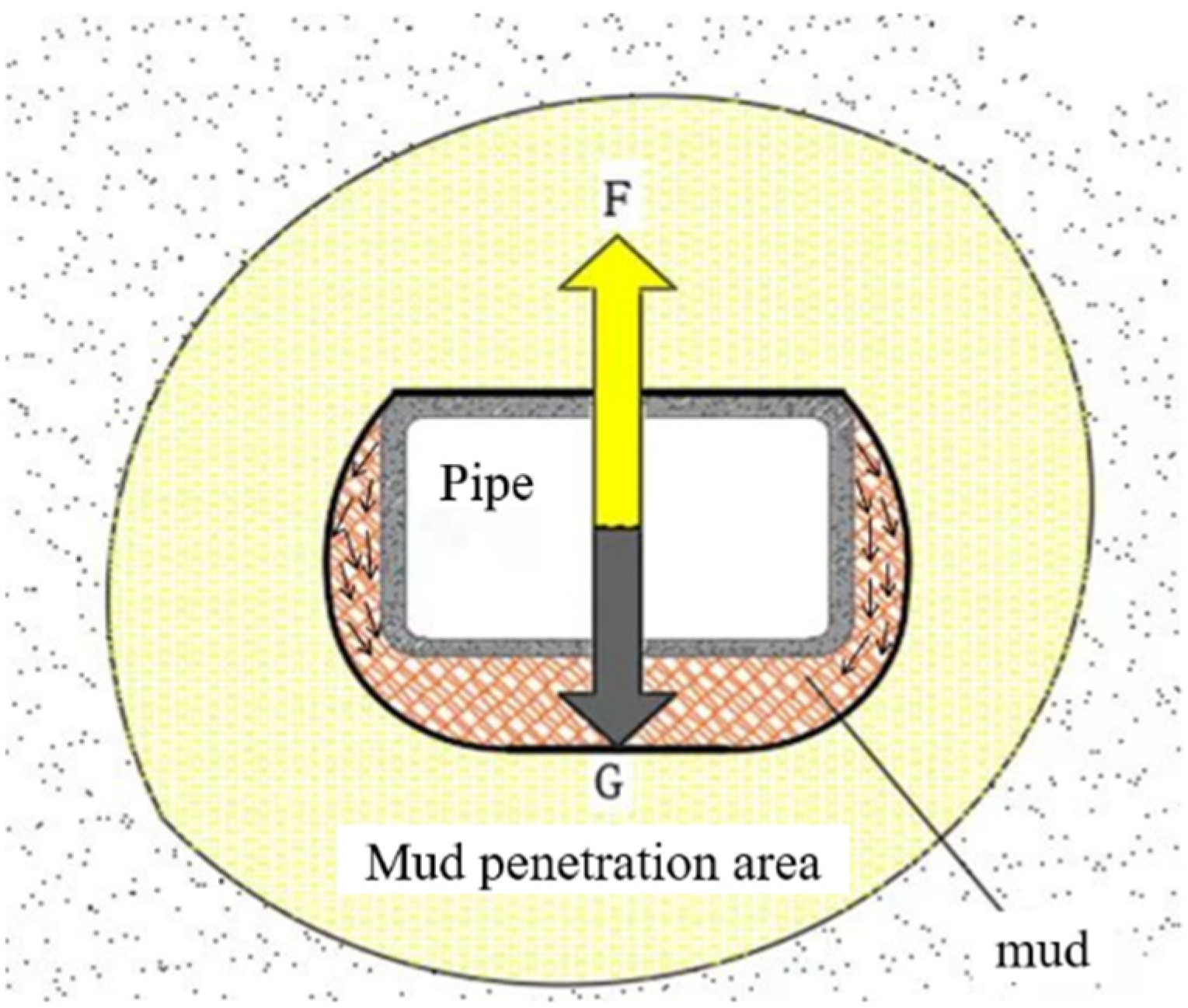
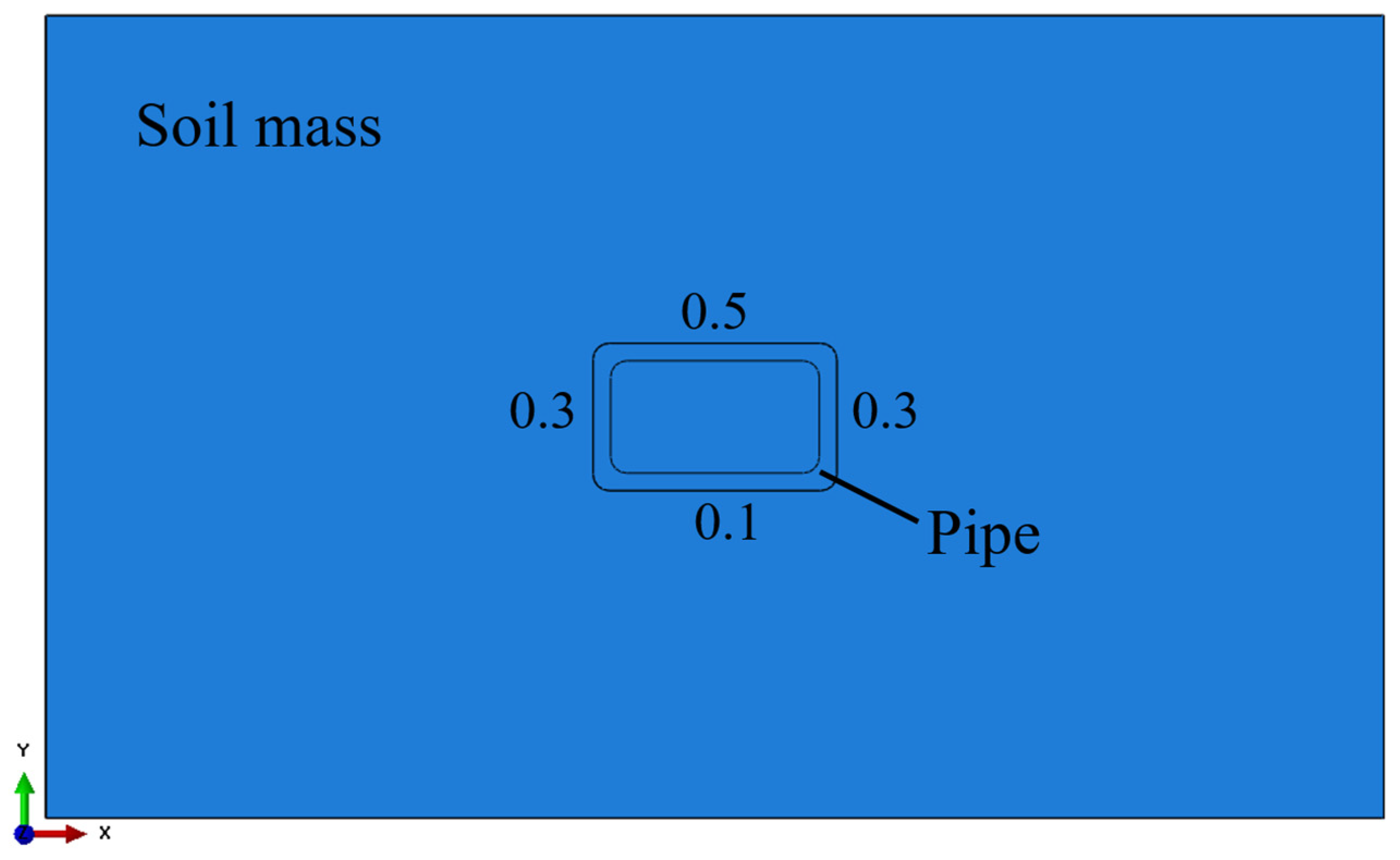
- The contact state between the pipe and the borehole wall is as follows: the top of the pipe is in contact with the soil, the other three side walls are in contact with the mud, and the mud sleeve is in the shape of ‘U’, as shown in Figure 3. Assuming that the contact state of each pipe–soil contact surface is continuous, the top of the pipe is fully in contact with the soil, and the friction coefficient is 0.5. The bottom is pipe slurry contact, and the friction coefficient is 0.1. The contact state of the pipe and soil on the left and right sides gradually transitions from top to bottom, and the friction coefficient is 0.3.
- ④
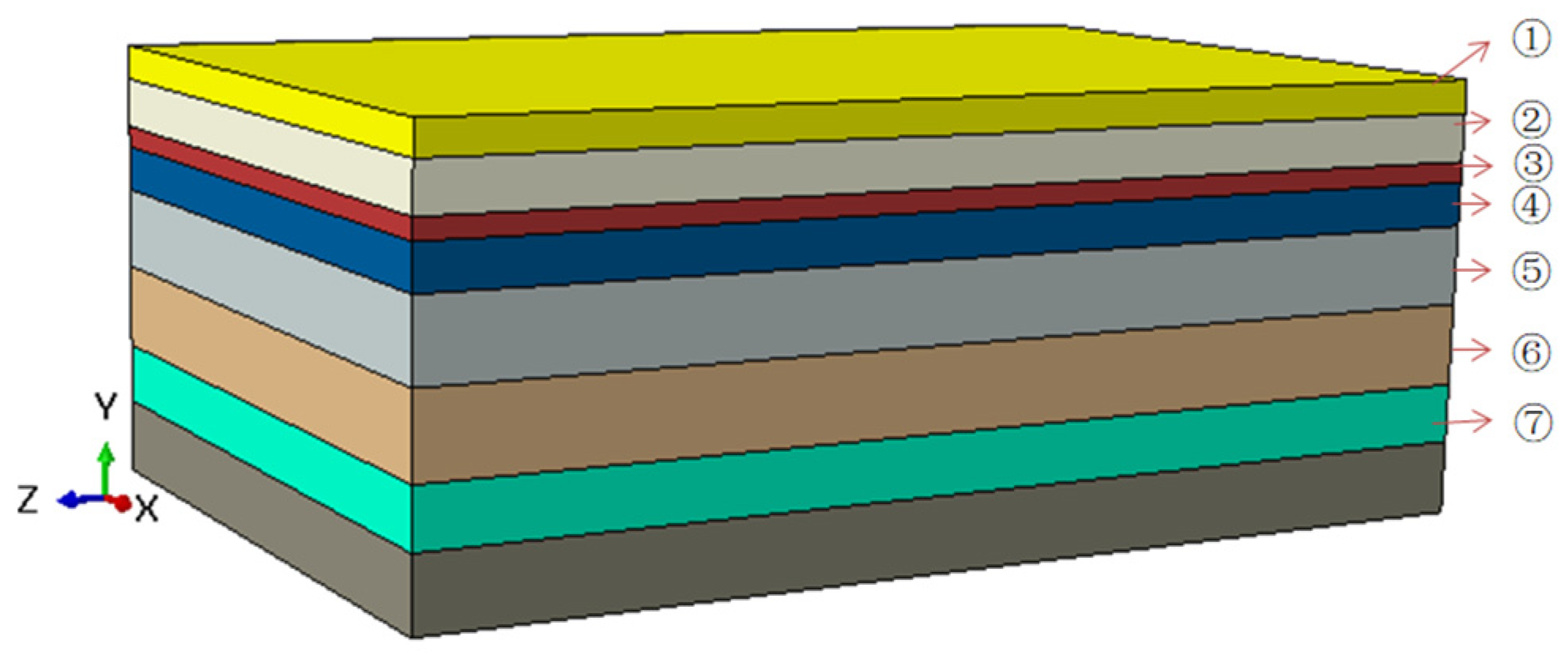
- Ignoring the interbedded strata, the thickness of each layer of soil is taken as the average thickness. Reinforced concrete pipe is regarded as homogeneous elastic material.
2.3. Model Parameter Setting
2.4. Simulation of Jacking Process
- (1)
- Construction Jacking Simulation
- (2)
- Pipe–Slurry–Soil Contact Simulation
- (3)
- Supplementary Measures of Process Simulation
2.5. Comparison and Verification of Measured Values and Simulated Values
3. The Definition and Evolution Law of the Carrying-Soil Effect Area
3.1. The Definition of the Back-Soil Effect
- (1)
- Theory of Plastic Mechanics of Rock and Soil Mass
- (2)
- Introducing Equivalent Plastic Strain
3.2. The Evolution Law of the Carrying-Soil Effect Area
- (1)
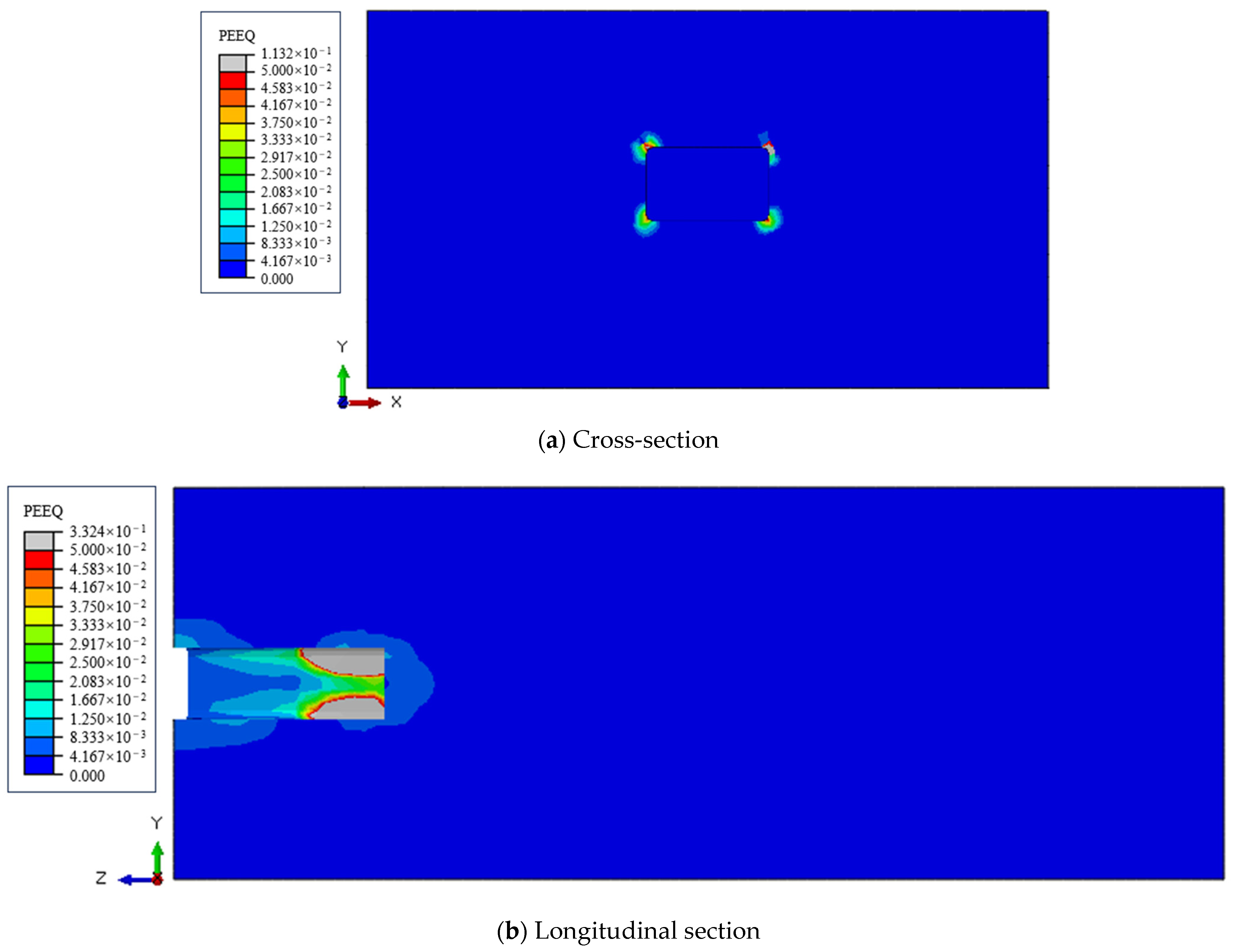
- Analysis of Initial Shape of Carrying-Soil Area
- (2)
- Morphological Analysis of the Carrying-Soil Area in the Initial Formation Stage
- (3)
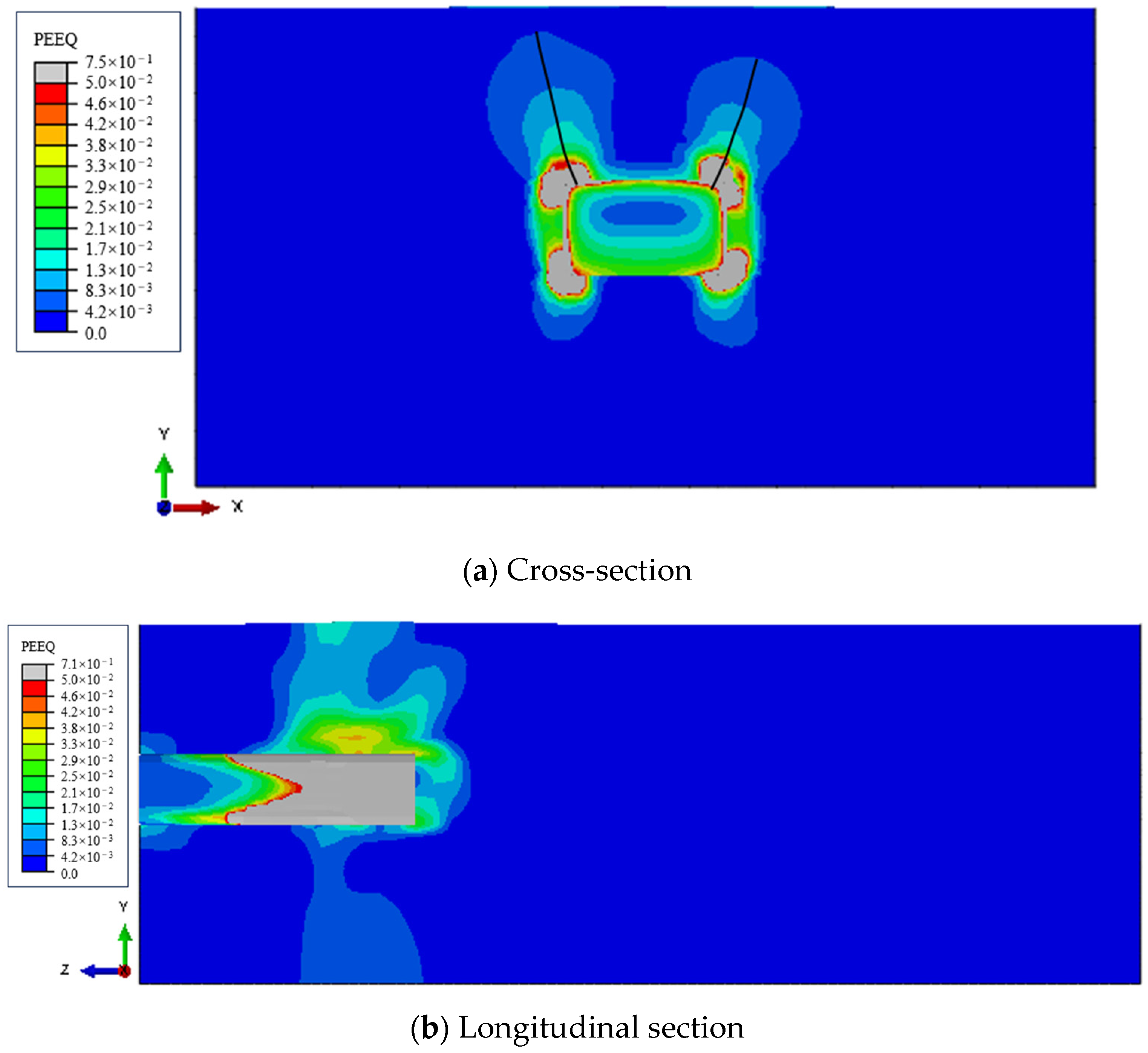
- Morphological Analysis of the Carrying-Soil Area in the Development Stage
- (4)
- Morphological Analysis of Carrying-Soil Area in Stable Stage
4. Conclusions
- (1)
- In the early stage of jacking, the equivalent plastic strain begins to occur at the round chamfer of the rectangular pipe jacking, and the equivalent plastic strain of the soil near the hole and the microtunnel boring machine is obvious.
- (2)
- In the early development stage of the carrying-soil effect, due to the uncoordinated internal deformation of the soil, the range of the equivalent plastic strain area is continuously expanding, gradually extending to the surface and forming a plastic deformation shear zone between the soil and the soil with no obvious plastic deformation. This uncoordinated internal deformation of the soil is also one of the reasons for the local uplift of the surface.
- (3)
- In the later development stage of the carrying-soil effect, the plastic deformation shear zone extending to the surface gradually increases. When the distribution of the equivalent plastic zone of the soil in the cross-section of the forward jacking carrying-soil area no longer changes, the soil will move forward as a whole, and the overall carrying-soil effect phenomenon appears.
- (4)
- After the carrying-soil effect occurs in the stable stage, the plastic strain distribution of the stratum that the microtunnel boring machine has passed through tends to be stable, and the stable state extends forward with the jacking process, which also reflects the process of the continuous extension of the whole carrying-soil area.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Baosong, M. Trenchless Engineering; People’s Transportation Publishing House: Beijing, China, 2008. [Google Scholar]
- Sun, Y.; Wu, F.; Sun, W. Two underground pedestrian passages using pipe jacking: Case study. J. Geotech. Geoenviron. Eng. 2019, 145, 05018004. [Google Scholar] [CrossRef]
- Wen, K.; Shimada, H.; Zeng, W.; Sasaoka, T.; Qian, D. Frictional analysis of pipe-slurry-soil interaction and jacking force prediction of rectangular pipe jacking. Eur. J. Environ. Civ. Eng. 2018, 24, 814–832. [Google Scholar] [CrossRef]
- Ma, P.; Shimada, H.; Sasaoka, T.; Hamanaka, A.; Moses, D.N.; Dintwe, T.K.; Huang, S. A new method for predicting the friction resistance in rectangular pipe-jacking. Tunn. Undergr. Space Technol. 2022, 123, 104338. [Google Scholar] [CrossRef]
- Wang, L.; Chen, X.; Su, D.; Zhou, W.; Sun, B.; Pan, J.; Feng, M. Construction of a super-large prefabricated rectangular tunnel beneath a box culvert using pipe jacking: A case study. Tunn. Undergr. Space Technol. 2024, 152, 105913. [Google Scholar] [CrossRef]
- Deng, C.M.; Peng, J.M.; Shen, G.H. Discussion on control methods of ground surface settlement caused by rectangular pipe jacking construction in soft soils. Chin. J. Undergr. Space Eng. 2016, 12, 1002–1007. [Google Scholar]
- Limin, P.; Zhe, W.; Yichao, Y.E. Technological development and research status of rectangular pipe jacking method. Tunn. Constr. 2015, 35, 1–8. [Google Scholar]
- Binquan, Y.; Chuancan, C. Pipe Jacking Construction Technology; People’s Transportation Publishing House: Beijing, China, 2003. [Google Scholar]
- Gao, Y.; Feng, C.-Y.; Peng, C. Overall-carrying-soil effect of shallow buried rectangular pipe jacking. Chin. J. Geotech. Eng. 2018, 40, 1936–1942. [Google Scholar]
- Ma, P.; Shimada, H.; Ma, B.S. Research status and development trends of key technologies of rectangular pipe jacking. Tunn. Constr. 2022, 42, 1677. [Google Scholar]
- Dou, X.T.; Wang, H.P.; Cao, W.M. Cause Analysis and treatment measures for overall-carrying-soil effect of shallow-buried rectangular pipe jacking. Tunn. Constr. 2019, 3, 145–151. [Google Scholar]
- Zhen, L.; Zhang, X.Y.; Li, X.J. On Discrimination Method and Treatment Measures for Overall Soil-carrying Effect of Shallow-buried Rectangular Pipe Jacking Projects. Mod. Tunn. Technol. 2022, 59, 167–171. [Google Scholar]
- Gao, H.; Wu, J.; Yang, W.S. Study on Restraining Effect of Separation Wall on Carrying-soil Effect of Pipe Jacking. Mod. Tunn. Technol. 2022, 59, 1120–1126. [Google Scholar]
- Fei, K.; Peng, J. Explanation of Geotechnical Engineering Examples in ABAQUS; People’s Post and Telecommunications Publishing House: Beijing, China, 2017. [Google Scholar]
- Li, T.L. Elastoplastic Mechanics; China University of Geosciences Press: Wuhan, China, 2006. [Google Scholar]
- Zhao, C.G.; Bai, B.; Wang, Y.X. Principles of Soil Mechanis; Tsinghua University Press: Beijing, China, 2017. [Google Scholar]
- Zhang, J.; Li, X.; Wang, X. Method for judging seismic stability state of soil slopes. Chin. J. Geotech. Eng. 2018, 40, 2096–2102. [Google Scholar]
- Liu, M.; Zhiyin, W.; Han, B. Equivalent Plastic Strain Entropy Method of Slope Stability Assessment and its Application. Sci. Technol. Eng. 2013, 13, 9109–9113. [Google Scholar]
- Hu, Y.Q.; Tang, L.S.; Li, Z.Y. Mechanism of sliding friction at pile-soilinterface of jacked pile. J. Rock Soil Mech. 2015, 36, 1288–1294. [Google Scholar]
- Wang, Y.H.; Zhang, M.Y.; Li, C.H. Skin Friction of Jacked Pipe Pile and Mechanism Study on Sliding Friction of Pile-soil Interface. J. Basic Sci. Eng. 2021, 29, 1535–1549. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stratum Number | Stratum Name | Strata Thickness (m) | Natural Density (kN/m3) | Compression Coefficient (MPa−1) | Compression Modulus (MPa) | Cohesion Force (kPa) | Internal Friction Angle (°) |
|---|---|---|---|---|---|---|---|
| ① | Plain fill | 2.3 | 19.2 | 0.33 | 6.1 | 27.9 | 16.8 |
| ② | Clay | 3.3 | 19.9 | 0.24 | 7.4 | 41.4 | 15.7 |
| ③ | Silty clay mixed with silt | 1.4 | 19.2 | 0.29 | 6.5 | 16.8 | 22.7 |
| ④ | Silty sand mixed with silt | 3 | 19.1 | 0.20 | 9.4 | 4.6 | 31.4 |
| ⑤ | Silty sand | 5.4 | 19.4 | 0.19 | 9.7 | 3.8 | 33.4 |
| ⑥ | Silty clay | 5.6 | 19.3 | 0.30 | 6.3 | 25.7 | 17.7 |
| ⑦ | Clay | 4 | 19.8 | 0.22 | 7.8 | 43.8 | 15.9 |
| Dimension Parameter Name | Length/m | Width/m | Height/m | Thickness/m | Chamfering Radius of Outer Circle/m | Chamfering Radius of Inner Circle/m |
|---|---|---|---|---|---|---|
| Size parameters of pipe | 2.5 | 9.1 | 5.5 | 0.65 | 1.25 | 0.75 |
| Size parameters of microtunnel boring machine | 3 | 9.14 | 5.54 | - | 1.27 | 0.77 |
| Analysis Step Name | The Step Analysis Process | The Jacking Mileage after the Analysis Step Is Completed/m |
|---|---|---|
| In situ stress balance analysis step | Apply the initial ground stress and balance the initial ground stress | 0 |
| Assembly analysis step | Excavation of assembly space position, microtunnel boring machine and initial assembly of some subsequent pipe | 0 |
| Soil excavation 1 | Excavation of the soil in front of the first segment (2.5 m, the same as below) | 0 |
| Overall jacking 1 | The microtunnel boring machine and the subsequent pipe are jacked forward as a whole (2.5 m, the same below) | 2.5 |
| Soil excavation 2 | Complete the excavation of the soil in front of the second section | 2.5 |
| …… | …… | …… |
| Soil excavation 24 | Complete the excavation of the soil in front of the final section | 57.5 |
| Overall jacking 24 | Complete the last section of the microtunnel boring machine and the subsequent pipe jacking forward as a whole | 60 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, P.; Lan, B.; Zhang, P.; Zeng, C.; Xu, T.; Xu, Y.; Wu, R. Numerical Simulation Study on Evolution Process of Carrying-Soil Effect of Rectangular Pipe Jacking. Buildings 2024, 14, 3057. https://doi.org/10.3390/buildings14103057
Ye P, Lan B, Zhang P, Zeng C, Xu T, Xu Y, Wu R. Numerical Simulation Study on Evolution Process of Carrying-Soil Effect of Rectangular Pipe Jacking. Buildings. 2024; 14(10):3057. https://doi.org/10.3390/buildings14103057
Chicago/Turabian StyleYe, Peng, Bin Lan, Peng Zhang, Cong Zeng, Tianshuo Xu, Yong Xu, and Rudong Wu. 2024. "Numerical Simulation Study on Evolution Process of Carrying-Soil Effect of Rectangular Pipe Jacking" Buildings 14, no. 10: 3057. https://doi.org/10.3390/buildings14103057