
Structural Evaluation on the Floating Production Storage and Offloading Large Flow Gas Processing Module Based on FEM Analysis

 ,
,
Abstract
:1. Introduction
2. Methodology
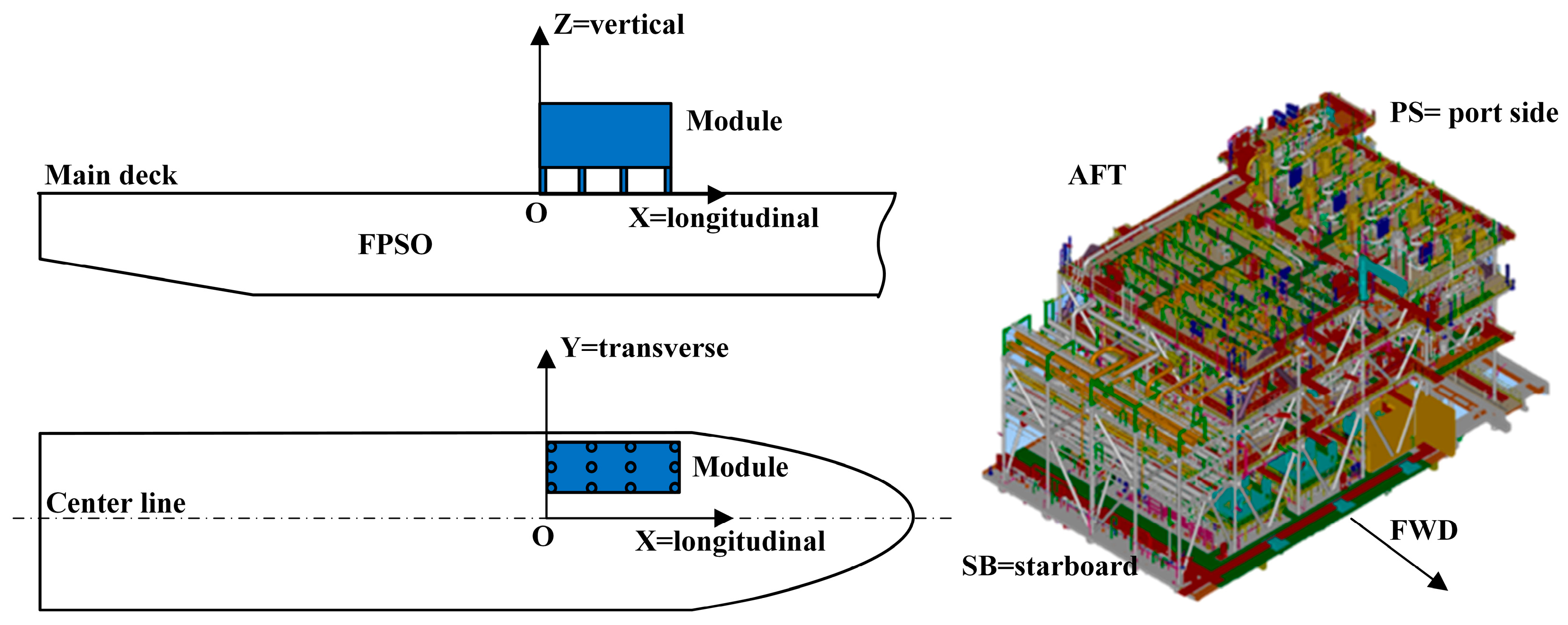
2.1. Simulation Model
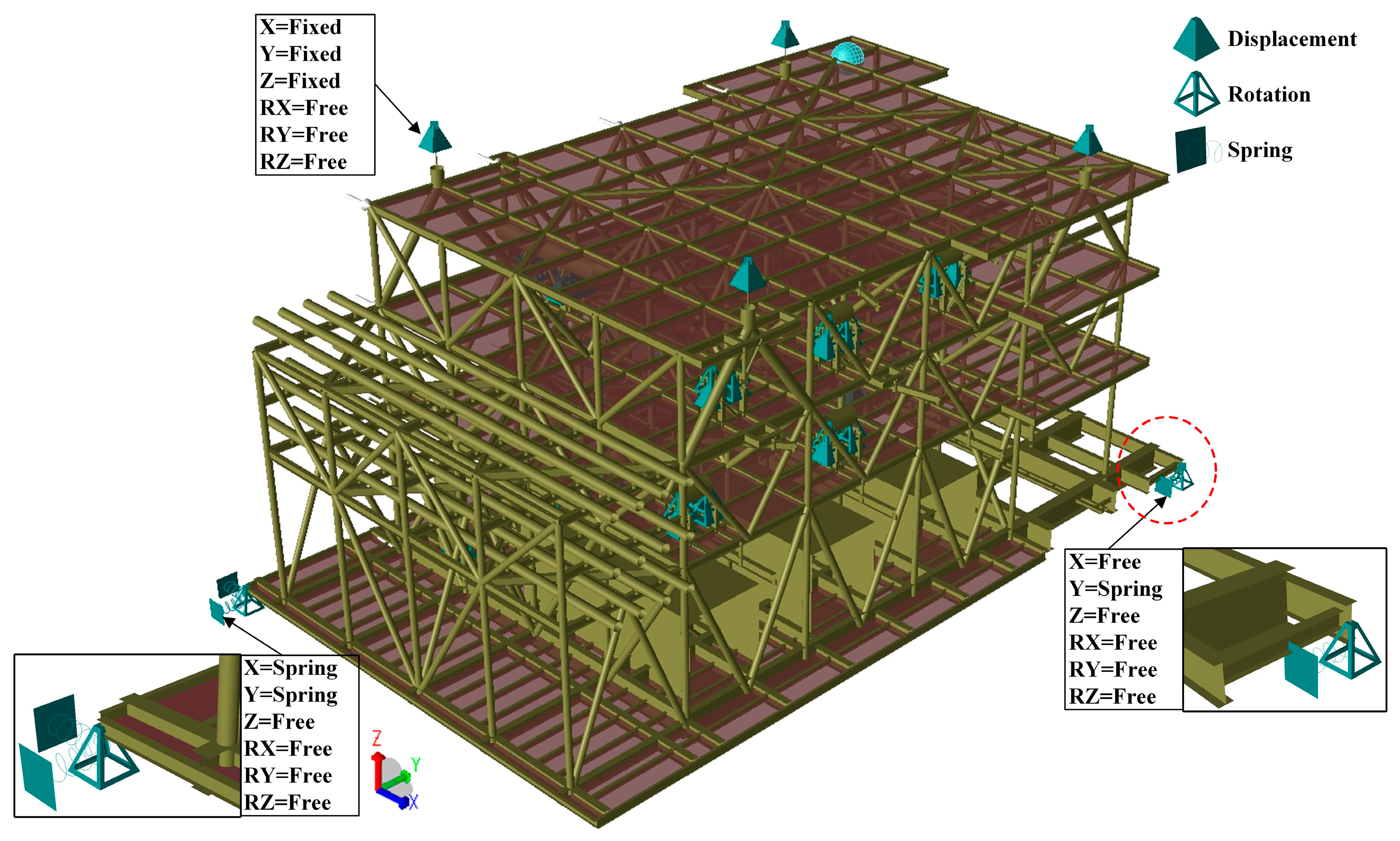
2.2. Boundary Conditions
2.3. Load Design
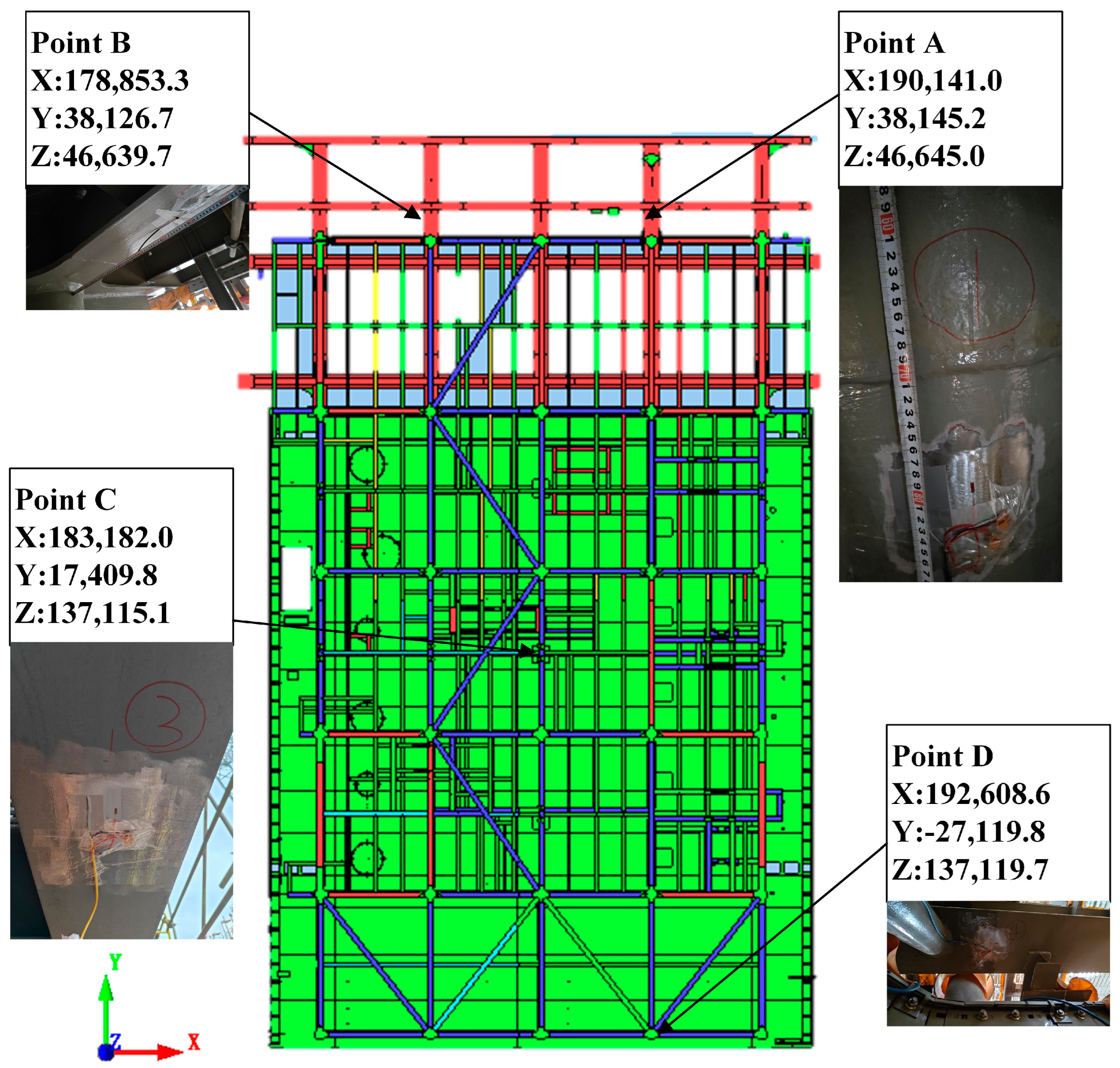
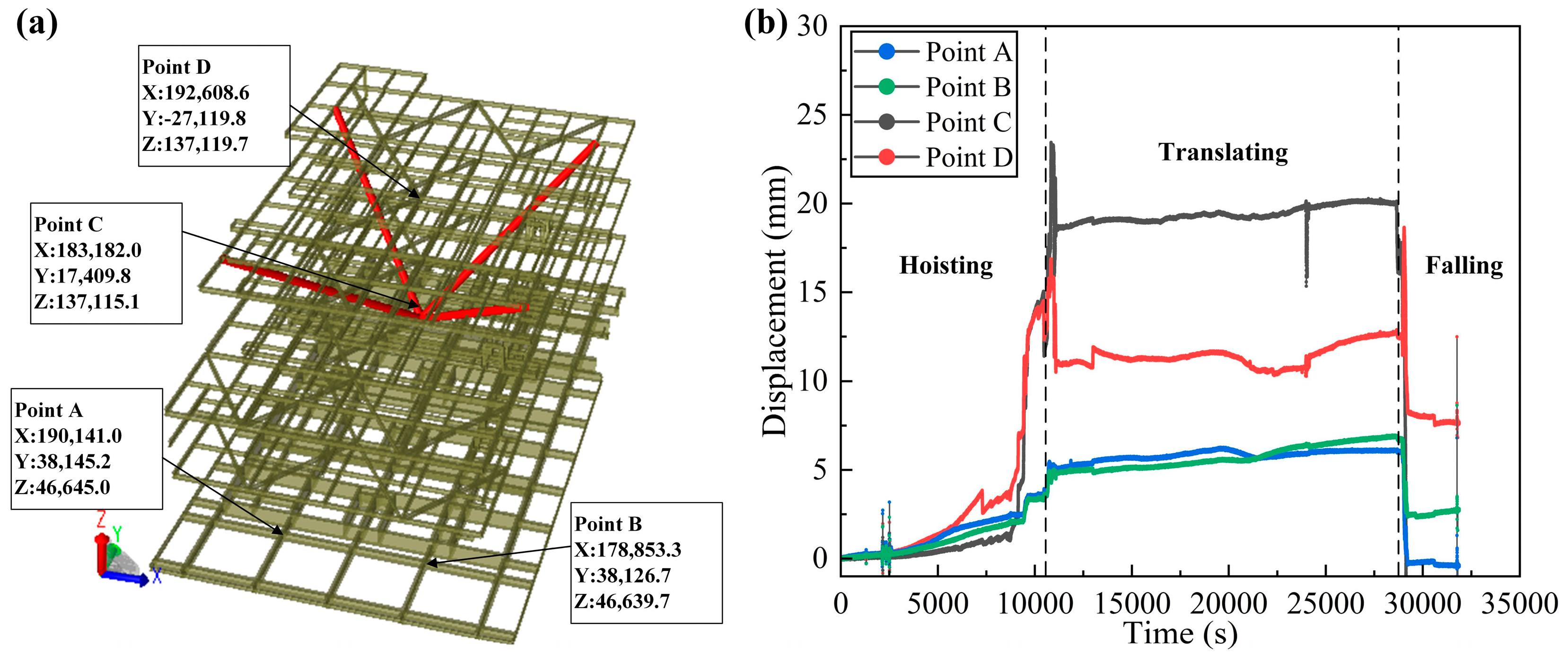
2.4. Lifting Procedure and Monitoring
3. Results and Discussion
4. Conclusions
- (1)
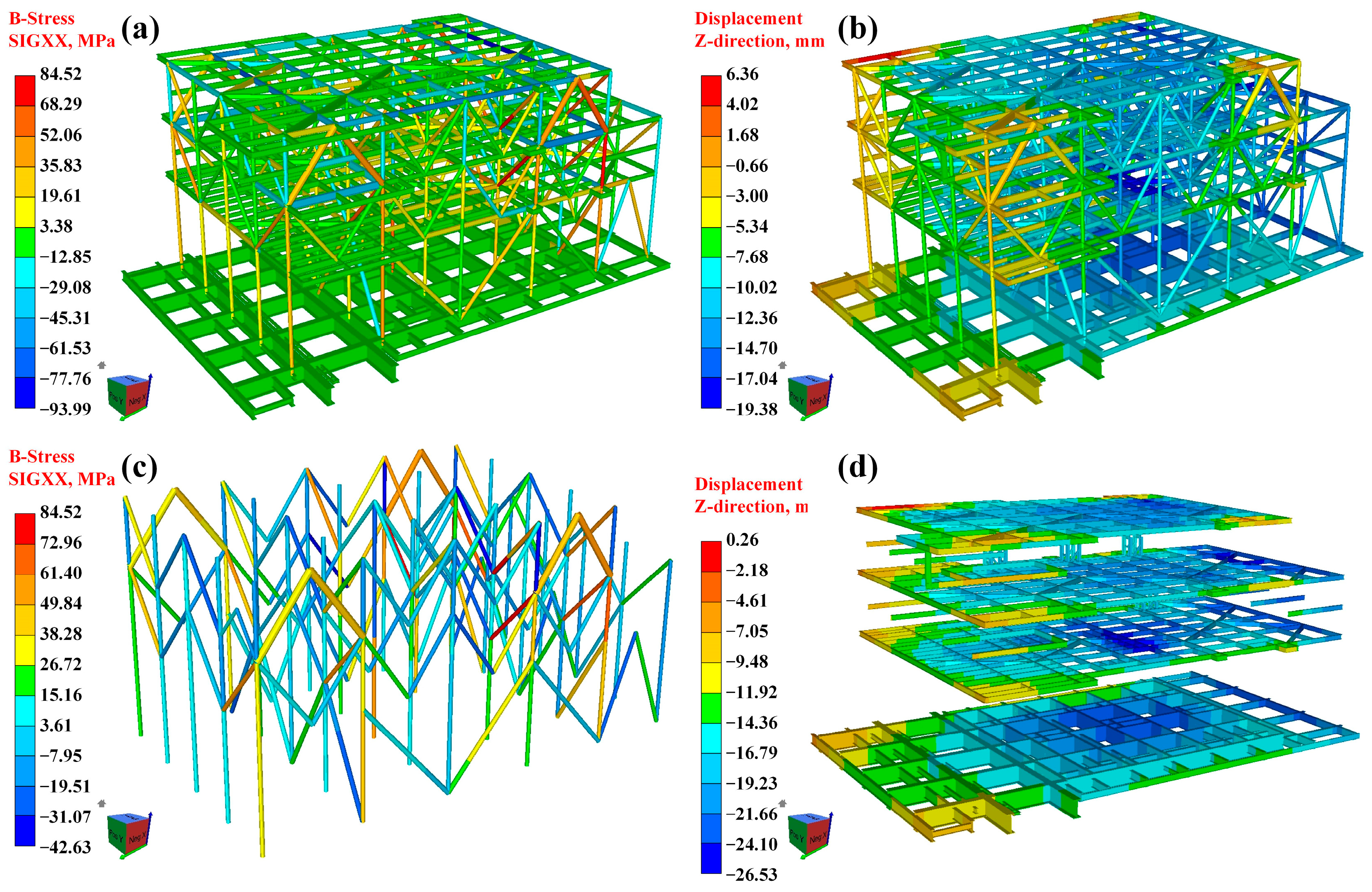
- The finite element analysis (FEA) executed in DNV GeniE software demonstrated a significant improvement in the structural integrity of the FPSO production module following the implementation of temporary reinforcement during the floating lifting process.
- (2)
- The maximum stress in the module was reduced from pre-reinforcement levels to 84.52 MPa, and the maximum deformation was similarly reduced to 19.36 mm. These results validate the effectiveness of the temporary reinforcement in controlling both stress and deformation, ensuring safe lifting conditions.
- (3)
- The strategically placed temporary support effectively controlled excessive deformation, confirming the robustness of this reinforcement strategy for heavy lifting operations in marine environments.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Armaroli, N.; Balzani, V. The Future of Energy Supply: Challenges and Opportunities. Angew. Chem. Int. Ed. 2007, 46, 52–66. [Google Scholar] [CrossRef] [PubMed]
- Collett, T.S. Energy resource potential of natural gas hydrates. AAPG Bull. 2002, 86, 1971–1992. [Google Scholar]
- Meng, H.; Kloul, L.; Rauzy, A. Production availability analysis of Floating Production Storage and Offloading (FPSO) systems. Appl. Ocean Res. 2018, 74, 117–126. [Google Scholar] [CrossRef]
- Rho, Y.-H.; Kim, K.; Jo, C.-H.; Kim, D.-Y. Static and dynamic mooring analysis–stability of floating production storage and offloading (FPSO) risers for extreme environmental conditions. Int. J. Nav. Archit. Ocean Eng. 2013, 5, 179–187. [Google Scholar]
- Picard, L.; Blanchet, P.; Bégin-Drolet, A. On-site handling: Automated connecting device for modular construction used as lifting apparatus. Structures 2024, 63, 106318. [Google Scholar] [CrossRef]
- Momeni, B. In-Place and Lift Analysis of an Offshore Module: Comparative Study. Master’s Thesis, University of Stavanger, Stavanger, Norway, 2015. [Google Scholar]
- Lundqvist, A. Structural Analysis for Heavy Lift Removal of Offshore Module. Master’s Thesis, University of Stavanger, Stavanger, Norway, 2009. [Google Scholar]
- Ali, I. Structural Modelling of Offshore Module for Loadout, Transportation and Installation. Master’s Thesis, University of Stavanger, Stavanger, Norway, 2014. [Google Scholar]
- Hwang, J.-K.; Roh, M.-I.; Lee, K.-Y. Detailed design and construction of the hull of a floating, production, storage and off-loading (FPSO) unit. Ships Offshore Struct. 2010, 5, 93–104. [Google Scholar] [CrossRef]
- Yadhav, A.; Kulkarni, M. Optimal design of FPSO topside module for in-place, lift and weighing conditions utilizing meta-heuristic optimization algorithms. Asian J. Civ. Eng. 2023, 24, 3055–3070. [Google Scholar] [CrossRef]
- Huang, Y.; He, Y.; Liu, Y.; Qiu, M.; Li, M.; Luo, Z. Application and analysis of elastomeric supporting style for topside modules of a spread mooring FPSO. Ocean Eng. 2022, 261, 112183. [Google Scholar] [CrossRef]
- Yang, Y.T.; Kwon, J.S. Development of Diagonal Tensioning System For Lifting FPSO Topside Module With Eccentric Center of Gravity. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Rhodes, Greece, 16–21 June 2004; p. ISOPE-I. [Google Scholar]
- Han, F.; Yu, J.; Chen, H.; Wu, Z.; Lei, Y.; Liu, J. Risk analysis method of FPSO module hoisting and its application. China Saf. Sci. J. 2019, 29, 123. [Google Scholar]
- Wang, F.; Zhang, Y.; Wang, Y.; Xu, Z.; Zhang, Z.; Ni, T.; Zhuang, J.; Tu, Y.; Qian, B. Floating non-traditional manufacture of floating drilling storage and offloading units—Study on modeling and optimization method for the underwater rotating technology. Mar. Struct. 2013, 31, 15–23. [Google Scholar] [CrossRef]
- Wen, Y.; Chen, G.; Wang, Y.; Zhao, D.; Lian, Z.; Sun, Z. The Study on Finite Element Strength Analysis for FPSO Accommodation Lifting. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 16−21 June 2019. [Google Scholar]
- Qian, W.; Lee, D.-K. Seasonal march of Asian summer monsoon. Int. J. Climatol. 2000, 20, 1371–1386. [Google Scholar] [CrossRef]
- Davenport, A.G. The application of statistical concepts to the wind loading of structures. Proc. Inst. Civ. Eng. 1961, 19, 449–472. [Google Scholar] [CrossRef]
- Yahagi, K.; Takagi, K. Moment loads acting on a blade of an ocean current turbine in shear flow. Ocean Eng. 2019, 172, 446–455. [Google Scholar] [CrossRef]
- Tannuri, E.A.; Sparano, J.V.; Simos, A.N.; Da Cruz, J.J. Estimating directional wave spectrum based on stationary ship motion measurements. Appl. Ocean Res. 2003, 25, 243–261. [Google Scholar] [CrossRef]
- Sarpkaya, T. Morison’s Equation and the Wave Forces on Offshore Structures; Naval Civil Engineering Laboratory: Carmel, CA, USA, 1981. [Google Scholar]
- Cosson, D.; Rowe, M.; Koolhof, W. Wheatstone subsea installation-Challenges associated with large numbers of Subsea heavy lifts and Spools Offshore Australia. In Proceedings of the Offshore Technology Conference Asia, Kuala Lumpur, Malaysia, 20–23 March 2018; OTC: Colombo, Sri Lanka, 2018; p. D031S018R003. [Google Scholar] [CrossRef]
- Park, K.-P.; Cha, J.-H.; Lee, K.-Y. Dynamic factor analysis considering elastic boom effects in heavy lifting operations. Ocean Eng. 2011, 38, 1100–1113. [Google Scholar] [CrossRef]
- Zhao, T.-F.; Zhang, Q.-Y.; Chu, G. Truss-type maintenance devices and corresponding pipeline lifting control strategies. Pet. Sci. 2021, 18, 939–950. [Google Scholar] [CrossRef]
- Tian, L.; Hao, J.; Wei, J.; Zheng, J. Integral lifting simulation of long-span spatial steel structures during construction. Autom. Constr. 2016, 70, 156–166. [Google Scholar] [CrossRef]
- Li, G.; Mo, T.; Xu, N.; Zhang, W.; Lu, H.; Deng, D. Improvement of overall lifting construction technology of large span steel structure hangar. In Proceedings of the 2nd International Conference on Internet of Things and Smart City (IoTSC 2022), Xiamen, China, 18–20 February 2022; SPIE: Bellingham, WA, USA, 2022; Volume 12249, pp. 923–928. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Density (kg/m3) | Elastic Modulus (GPa) | Poisson’s Ratio | Yield Strength (MPa) |
|---|---|---|---|---|
| Plate | 7850 | 206 | 0.3 | 450 |
| Beam | 7850 | 206 | 0.3 | 384 |
| Tubular | 7850 | 206 | 0.3 | 355 |
| Parameters | Value | Incident Angle/(°) | Value |
|---|---|---|---|
| Wind speed/(m·s−1) | 8.0 | Wind | 60 |
| Current speed/(m·s−1) | 0.3 | Current | 225 |
| Significant wave height/(m) | 1.5 | Wave | 104 |
| Swell height/(m) | 0.9 | Swell | 172 |
| Maximum Beam Stress | Maximum Z-Deformation | |
|---|---|---|
| Static lifting | 101.89 MPa | 26.53 mm |
| Floating lifting | 103.61 MPa | 29.14 mm |
| Floating lifting (with temporary reinforcement) | 84.52 MPa | 19.36 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, M.; He, Y.; Lyu, Y.; Wang, Z.; Li, M.; Zhou, Z.; Zhang, Y.; Lin, C. Structural Evaluation on the Floating Production Storage and Offloading Large Flow Gas Processing Module Based on FEM Analysis. Buildings 2024, 14, 3180. https://doi.org/10.3390/buildings14103180
Qiu M, He Y, Lyu Y, Wang Z, Li M, Zhou Z, Zhang Y, Lin C. Structural Evaluation on the Floating Production Storage and Offloading Large Flow Gas Processing Module Based on FEM Analysis. Buildings. 2024; 14(10):3180. https://doi.org/10.3390/buildings14103180
Chicago/Turabian StyleQiu, Ming, Yanping He, Yibin Lyu, Zhengang Wang, Mingzhi Li, Zhijie Zhou, Yongkang Zhang, and Chaohui Lin. 2024. "Structural Evaluation on the Floating Production Storage and Offloading Large Flow Gas Processing Module Based on FEM Analysis" Buildings 14, no. 10: 3180. https://doi.org/10.3390/buildings14103180