
Design and Analysis of Novel Anti-Rocking Bearing

Abstract
:1. Introduction
2. Working Principle and Design Method of Anti-Rocking Bearings
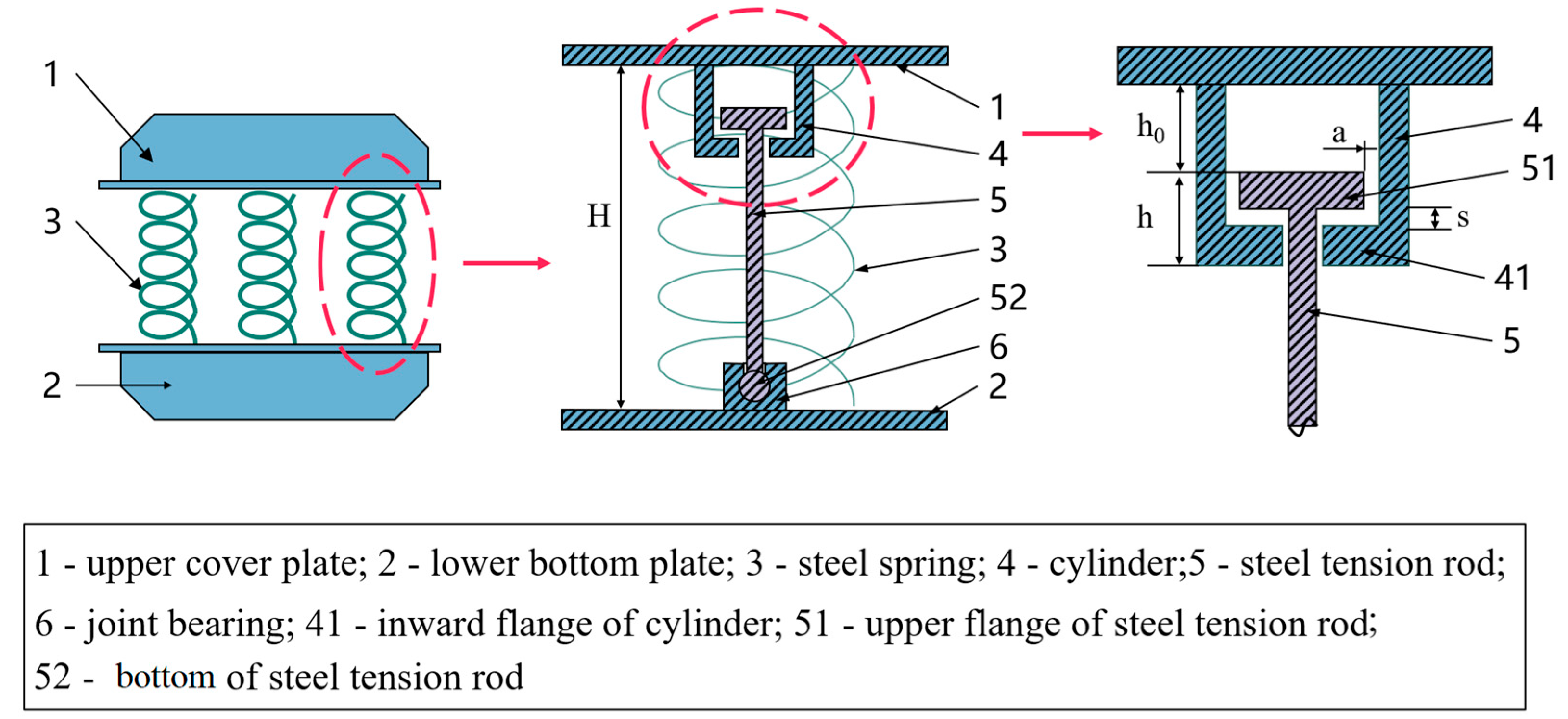
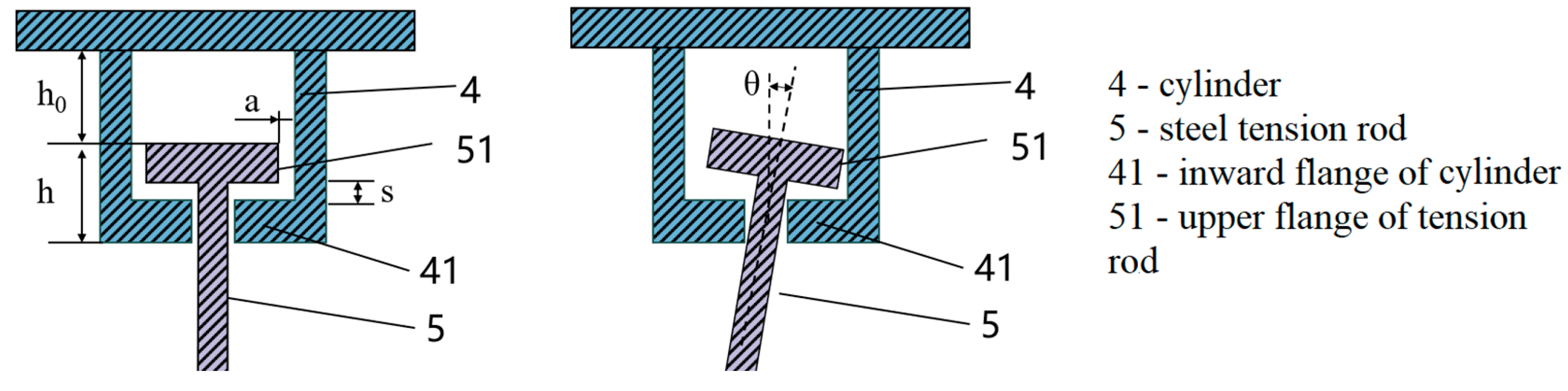
2.1. Structural Construction and Working Principle
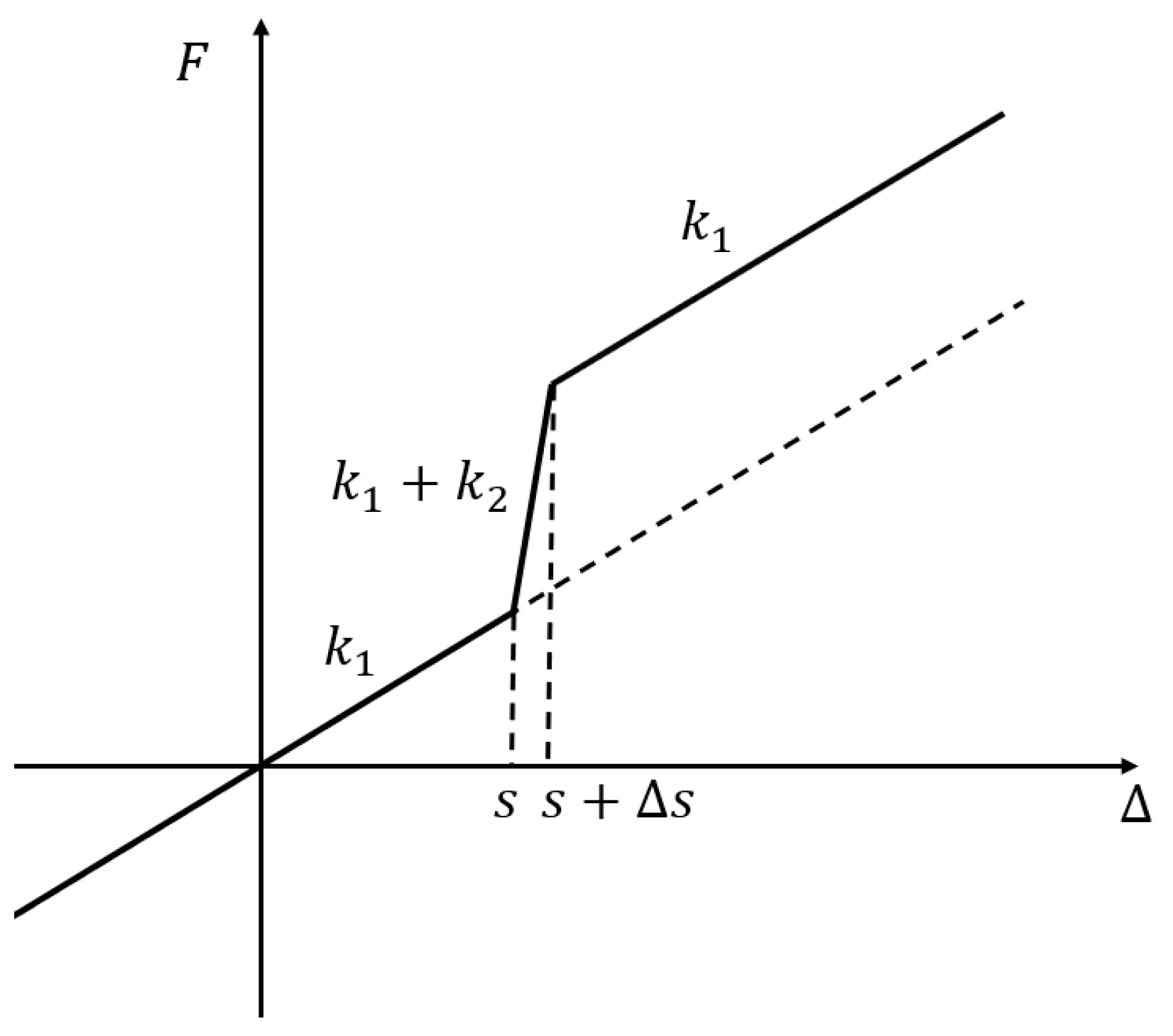
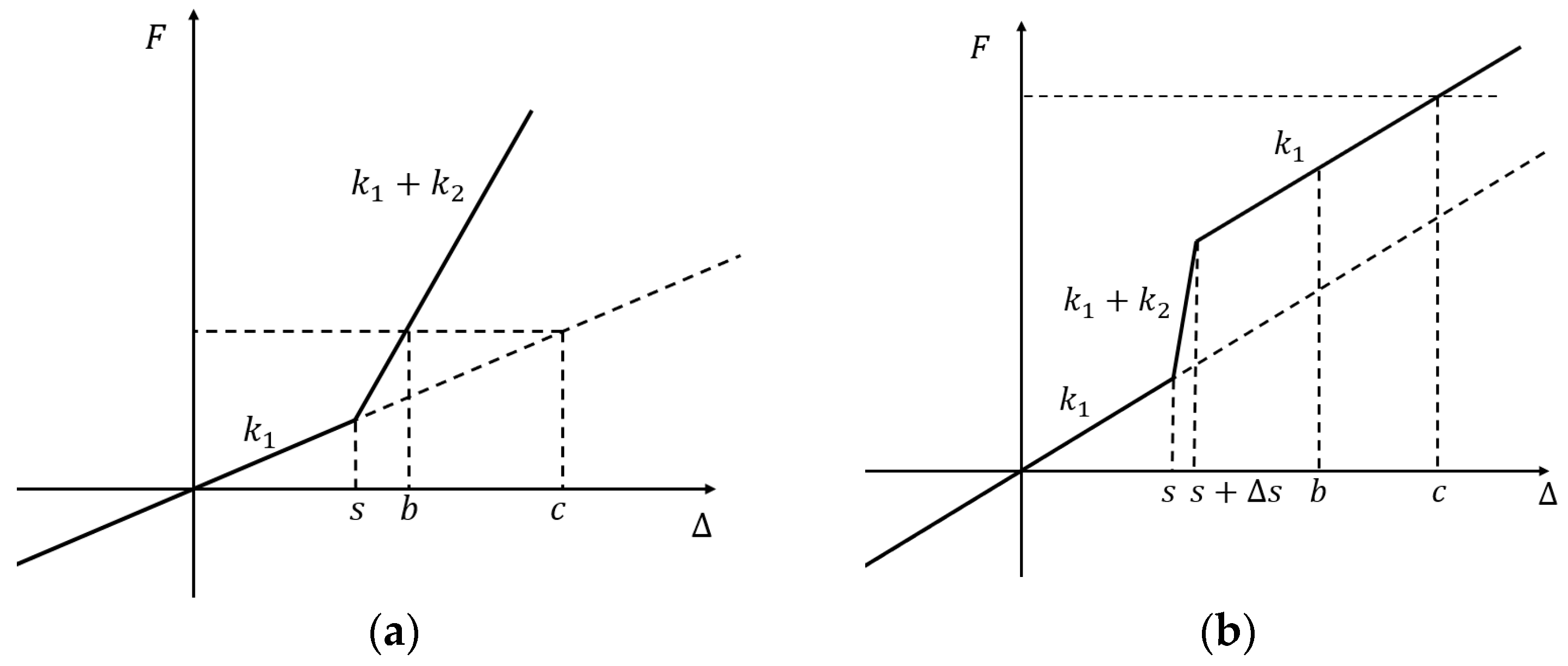
2.2. Stiffness Calculation
2.3. Design of Bearing Parameters
2.4. Performance Evaluation Methods
3. Analysis of Anti-Rocking Effect
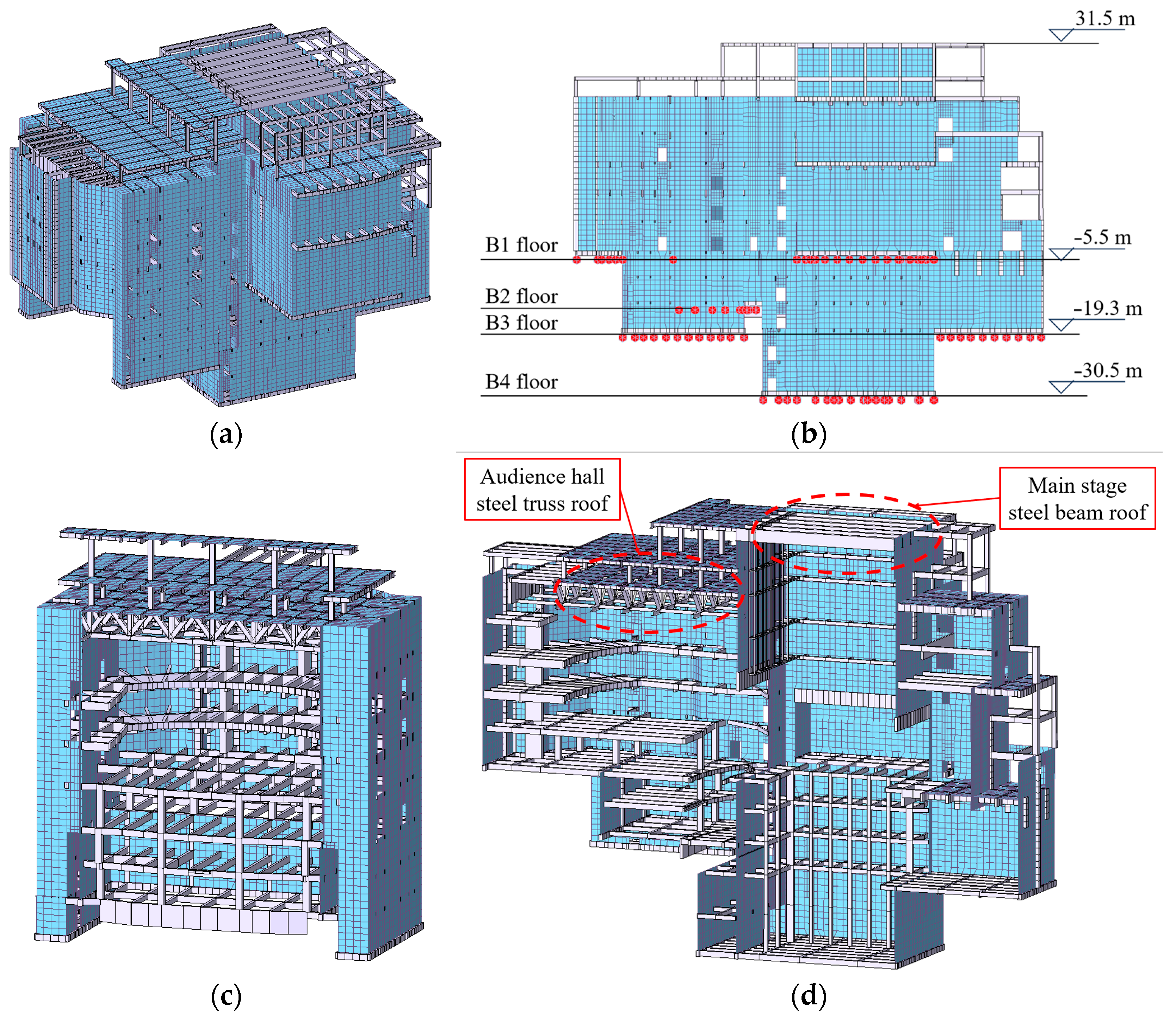
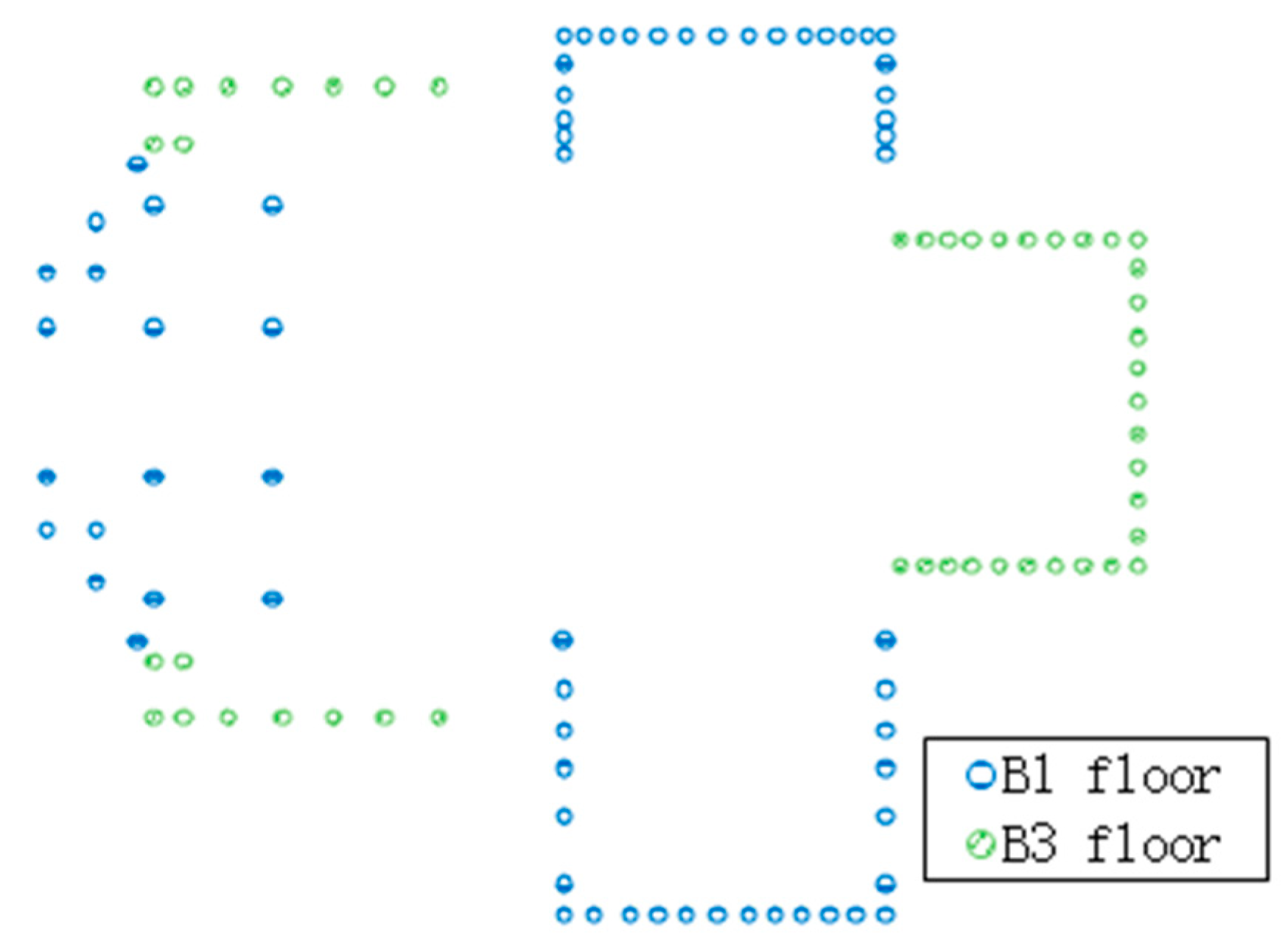
3.1. Analysis Model
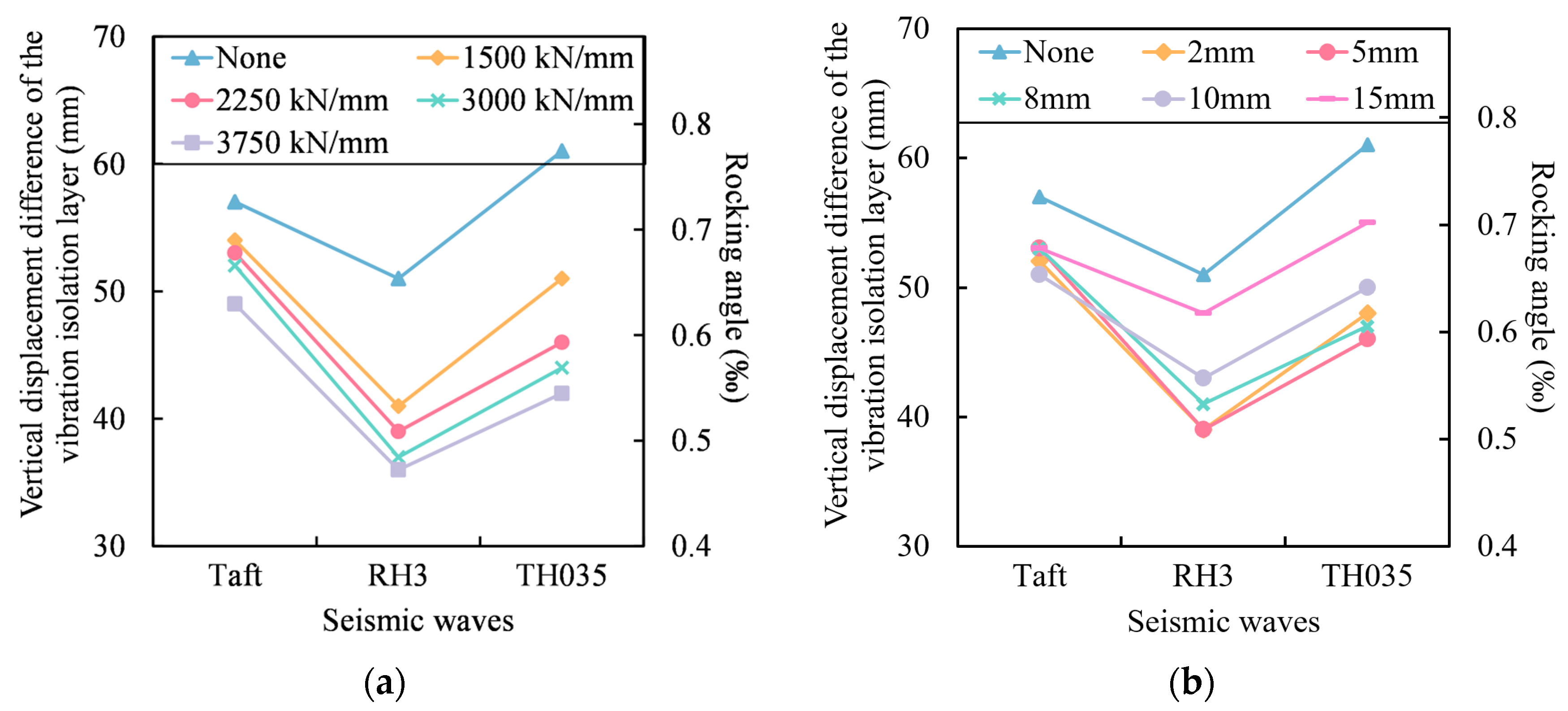
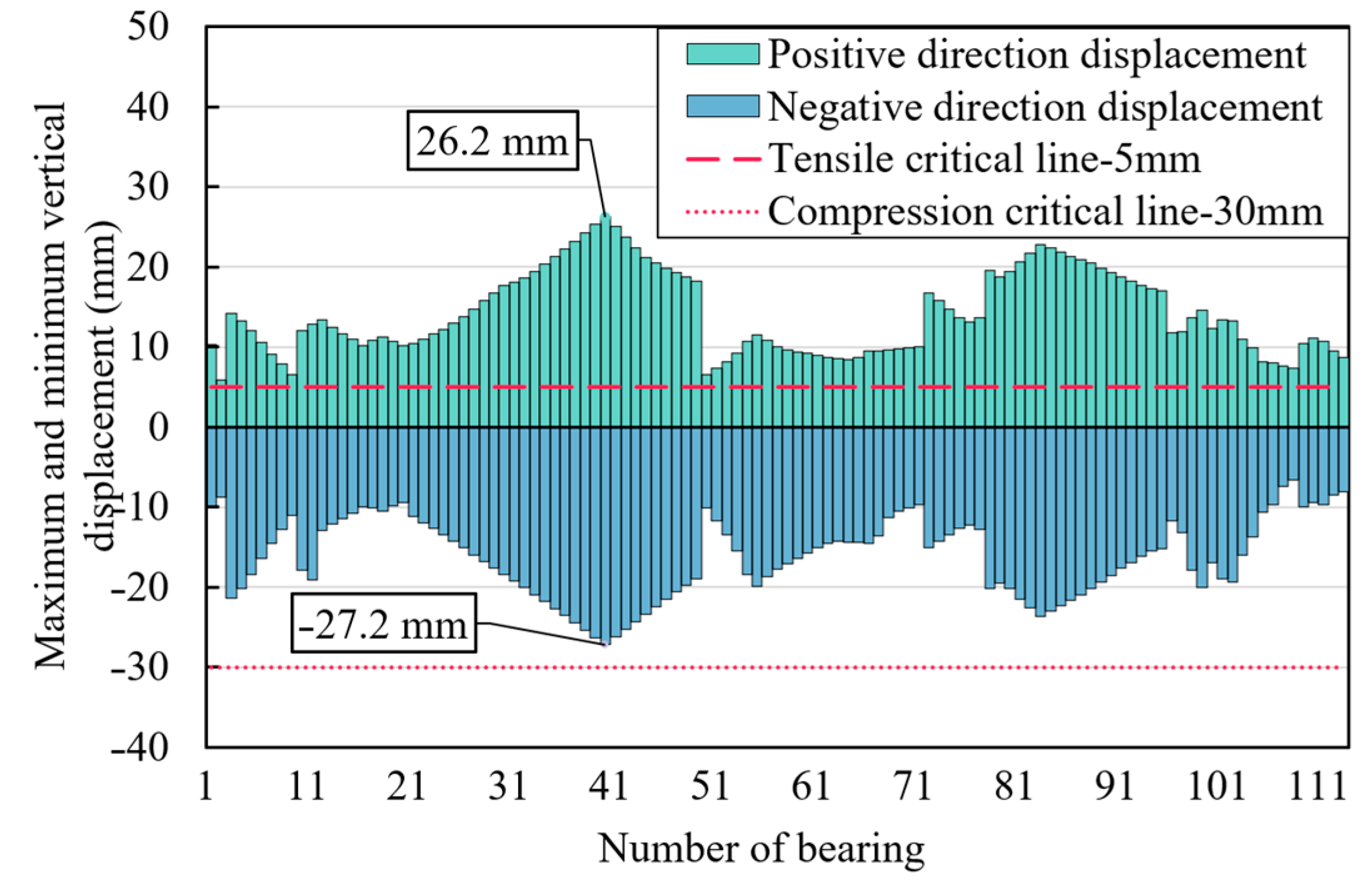
3.2. Structural Rocking Response
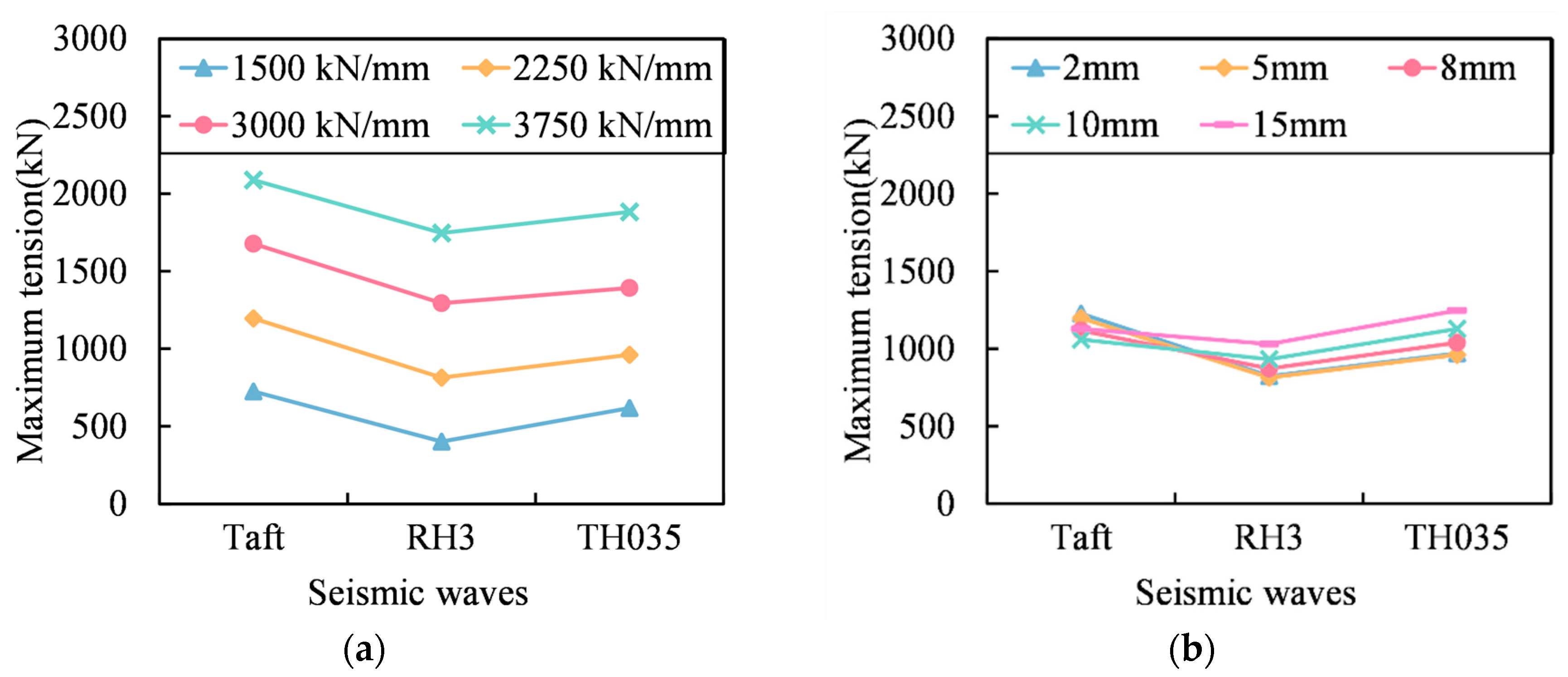
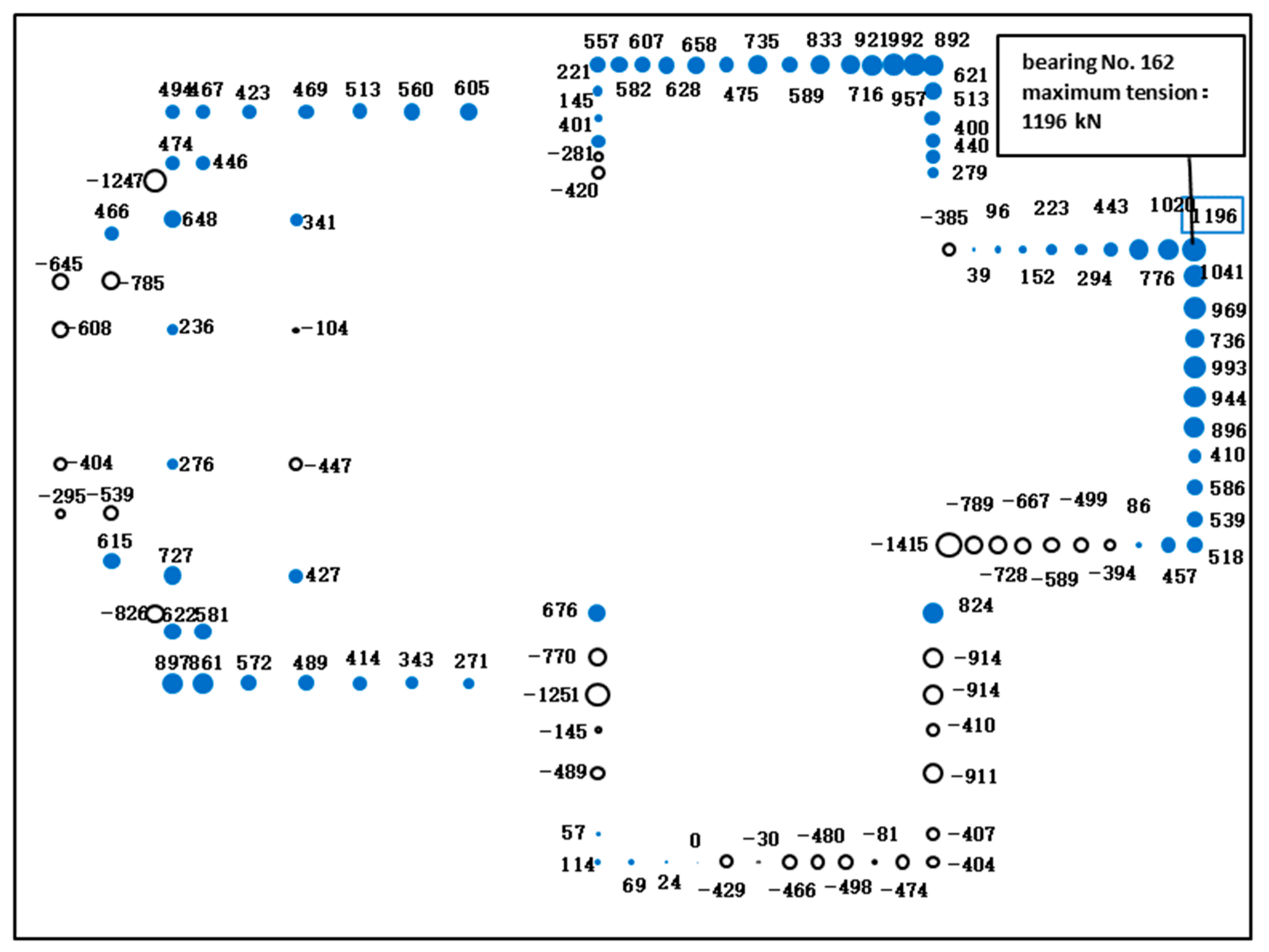
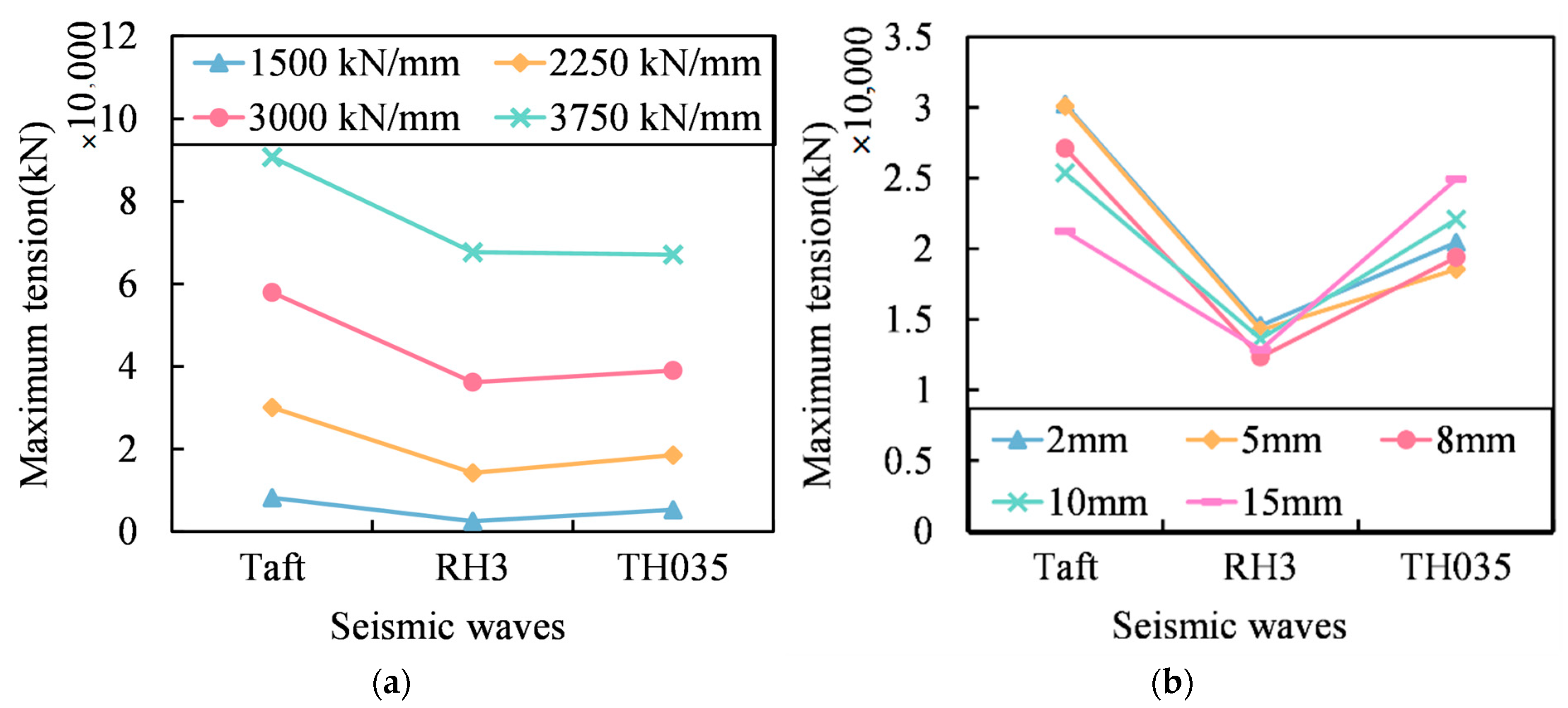
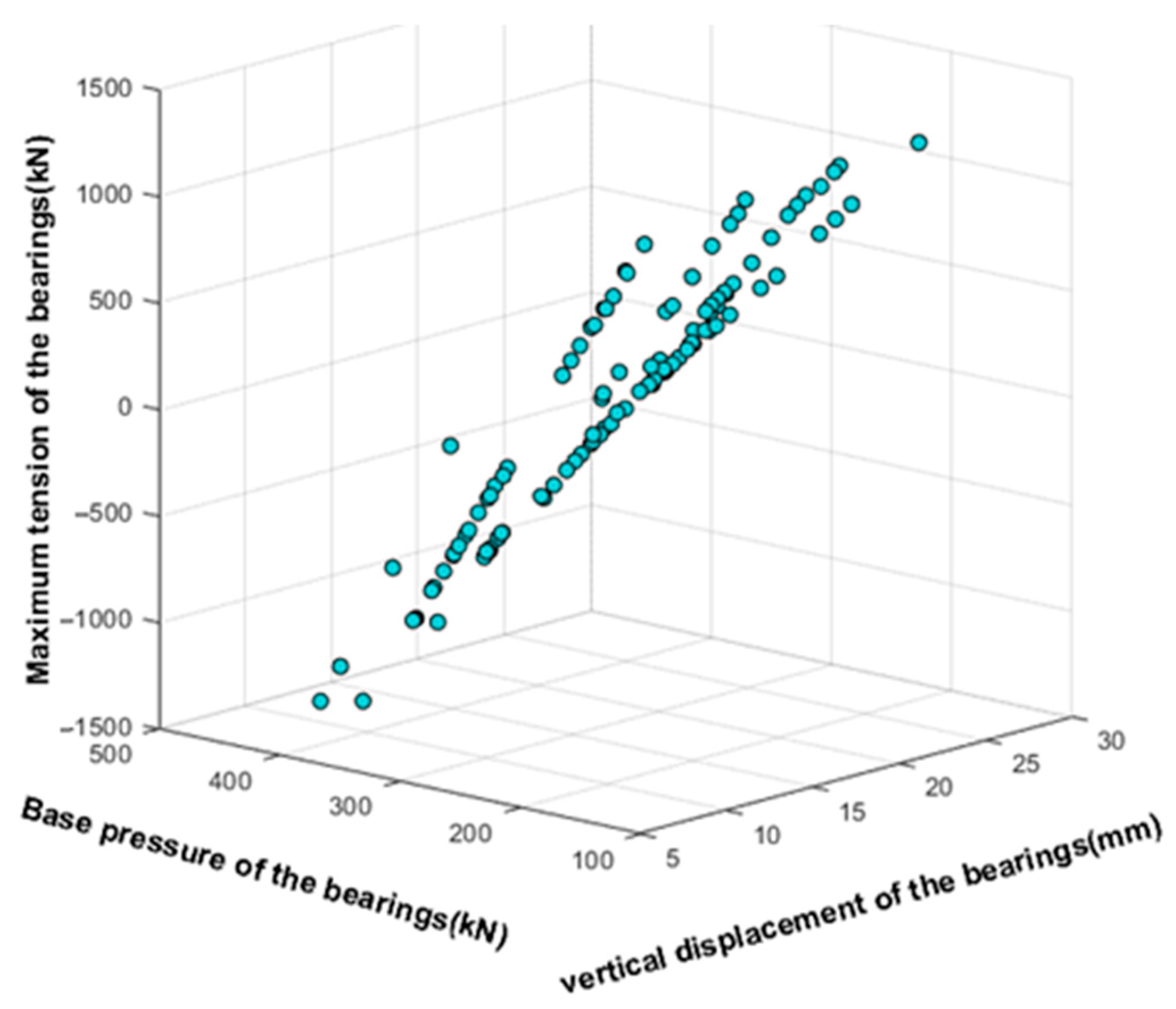
3.3. Maximum Tension
3.4. Hysteretic Performance of the Bearings
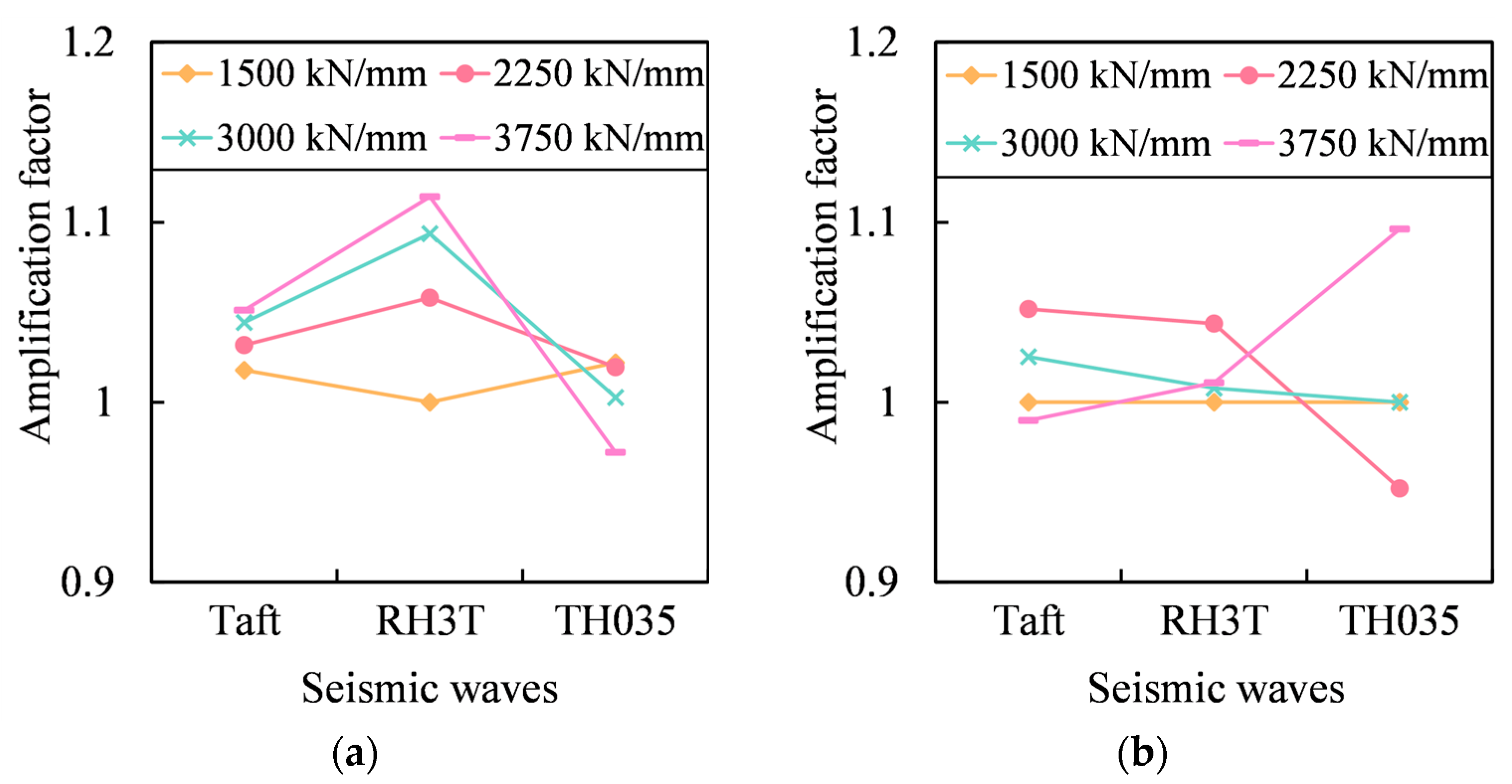
3.5. Structural Acceleration Response
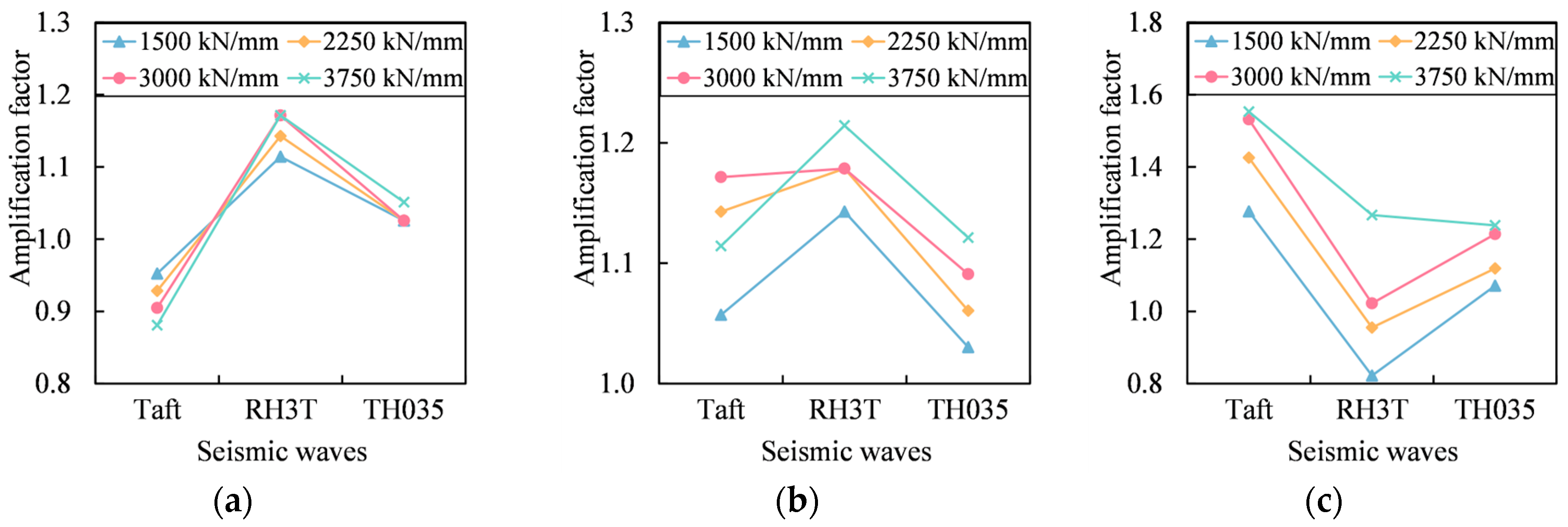
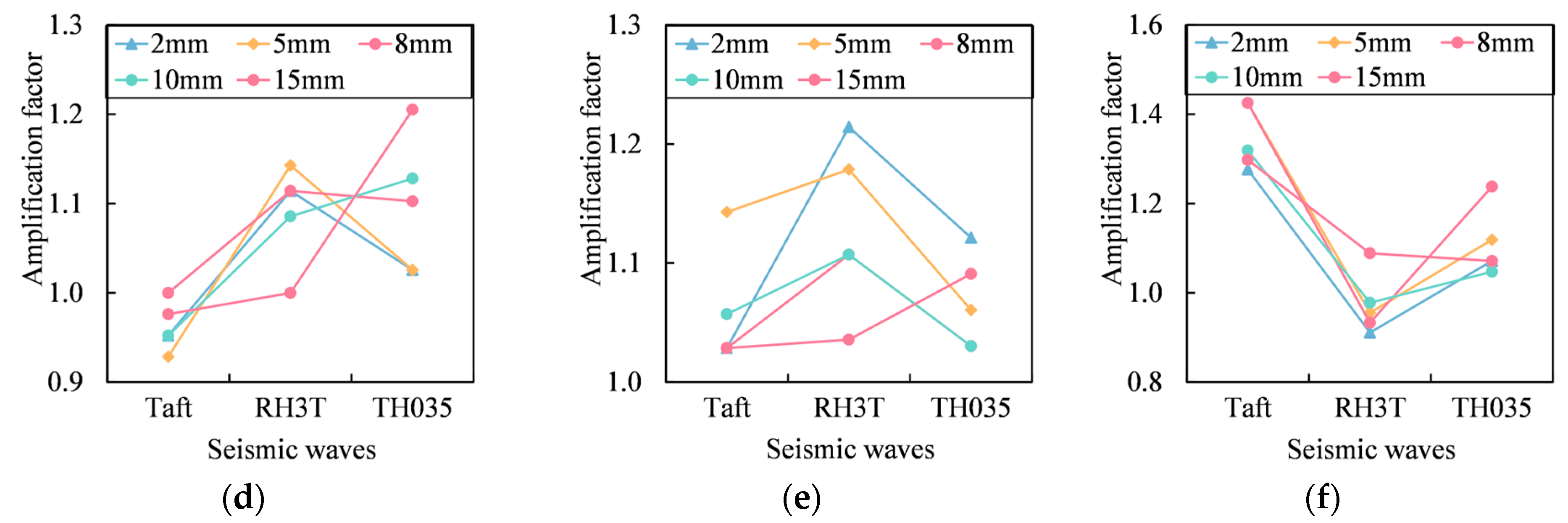
3.6. Selection of Steel Tension Rod Stiffness
4. Finite Element Simulation of Bearing
4.1. Material of Steel Tension Rods
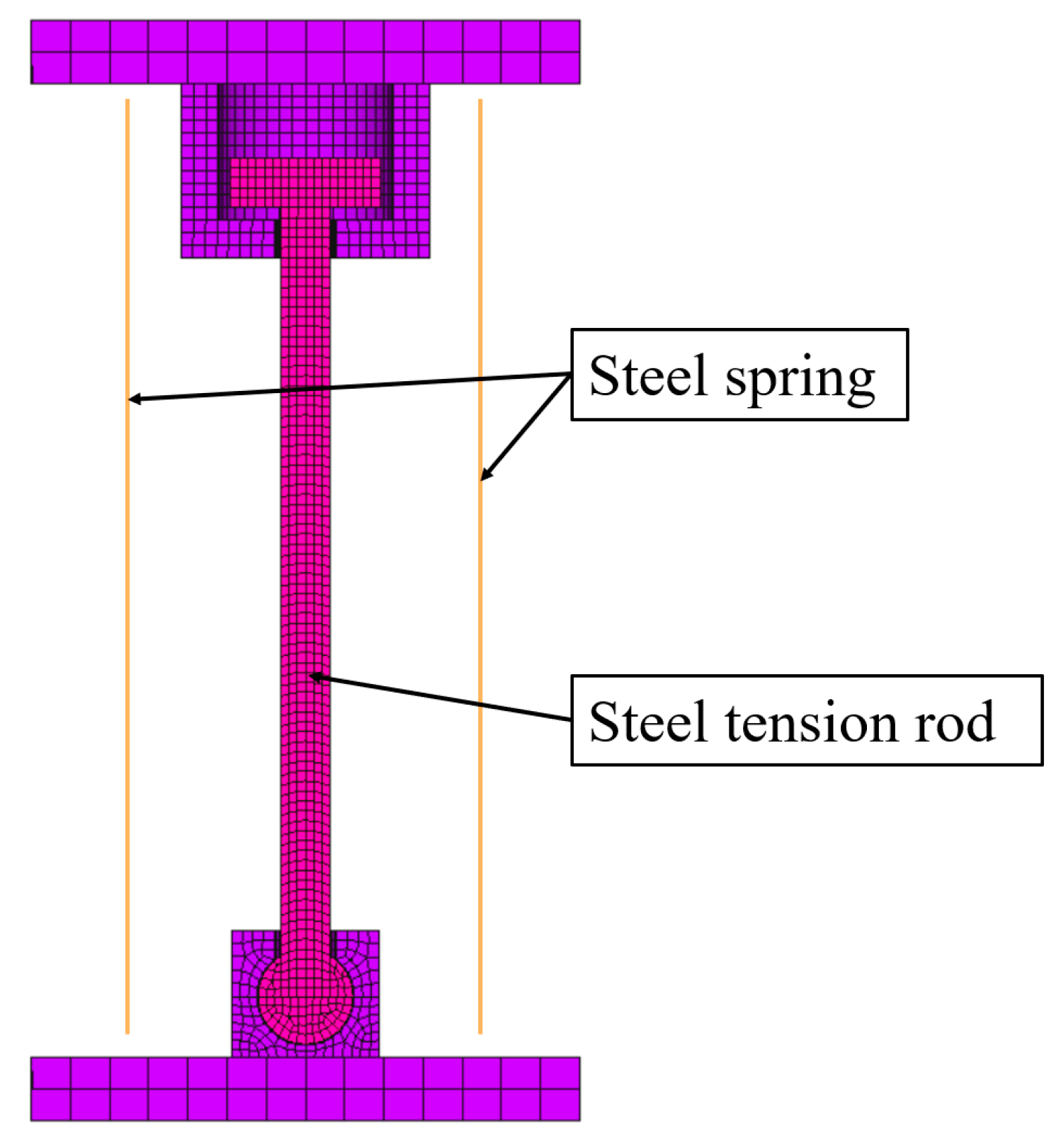
4.2. Finite Element Model
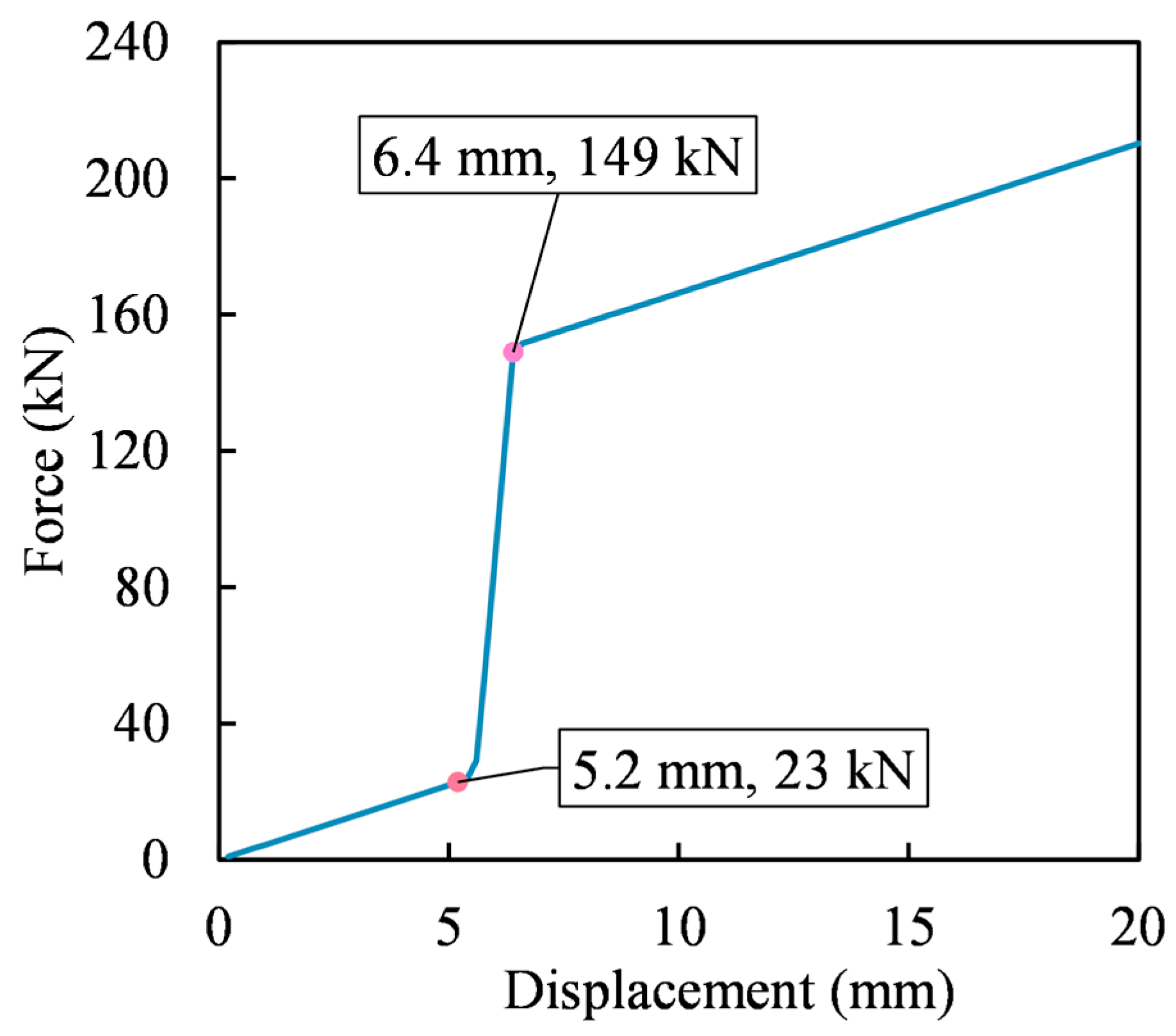
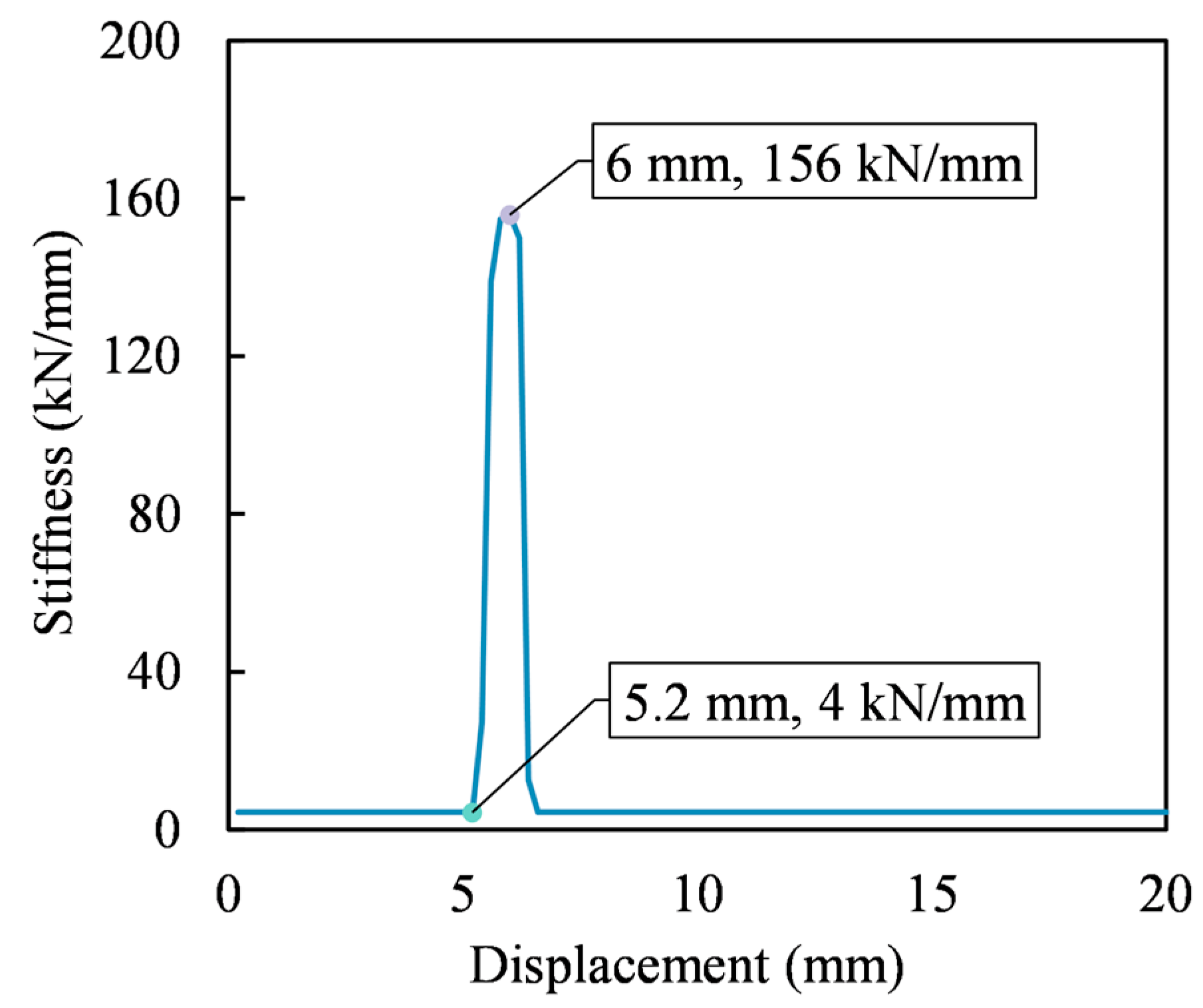
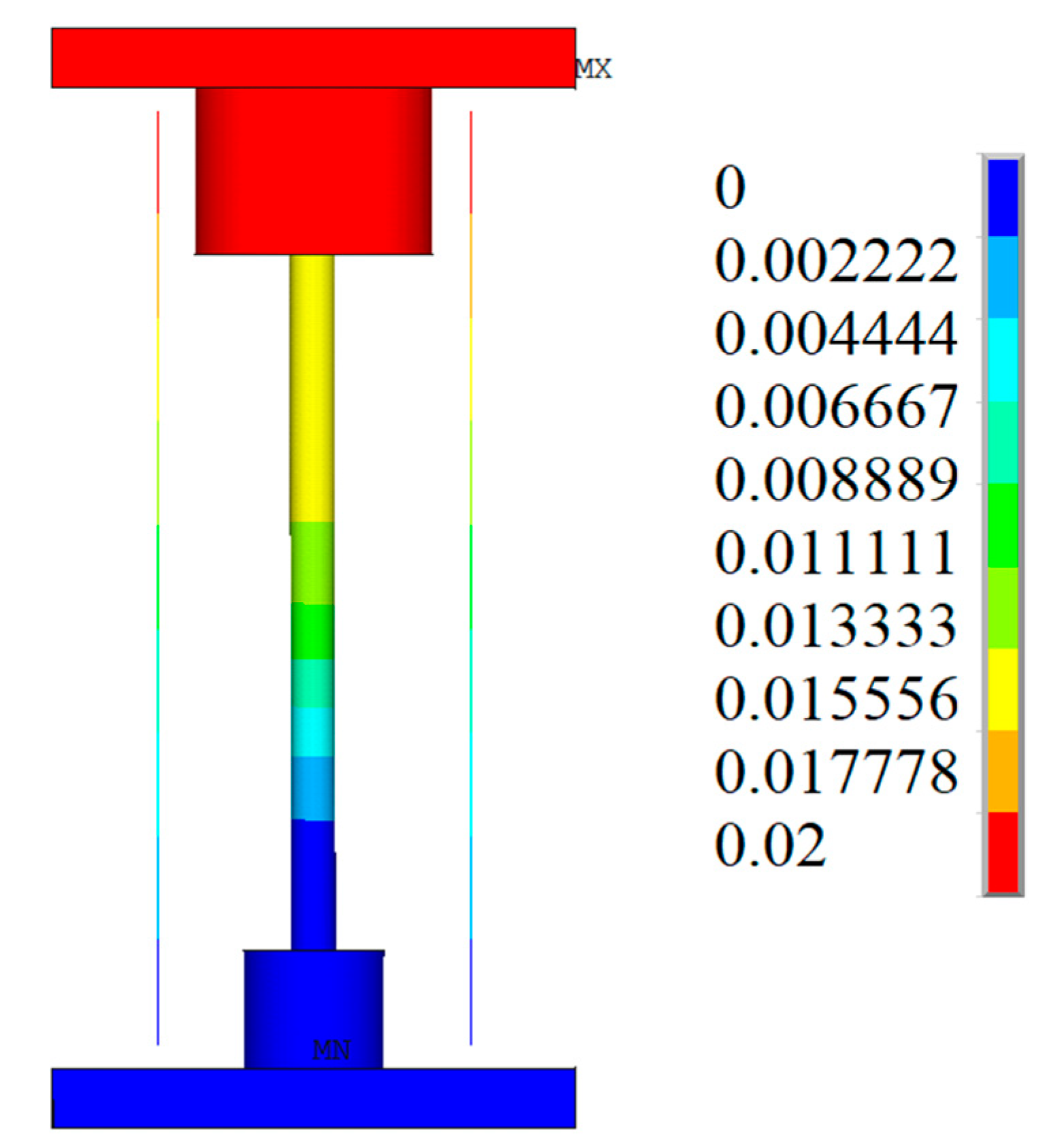
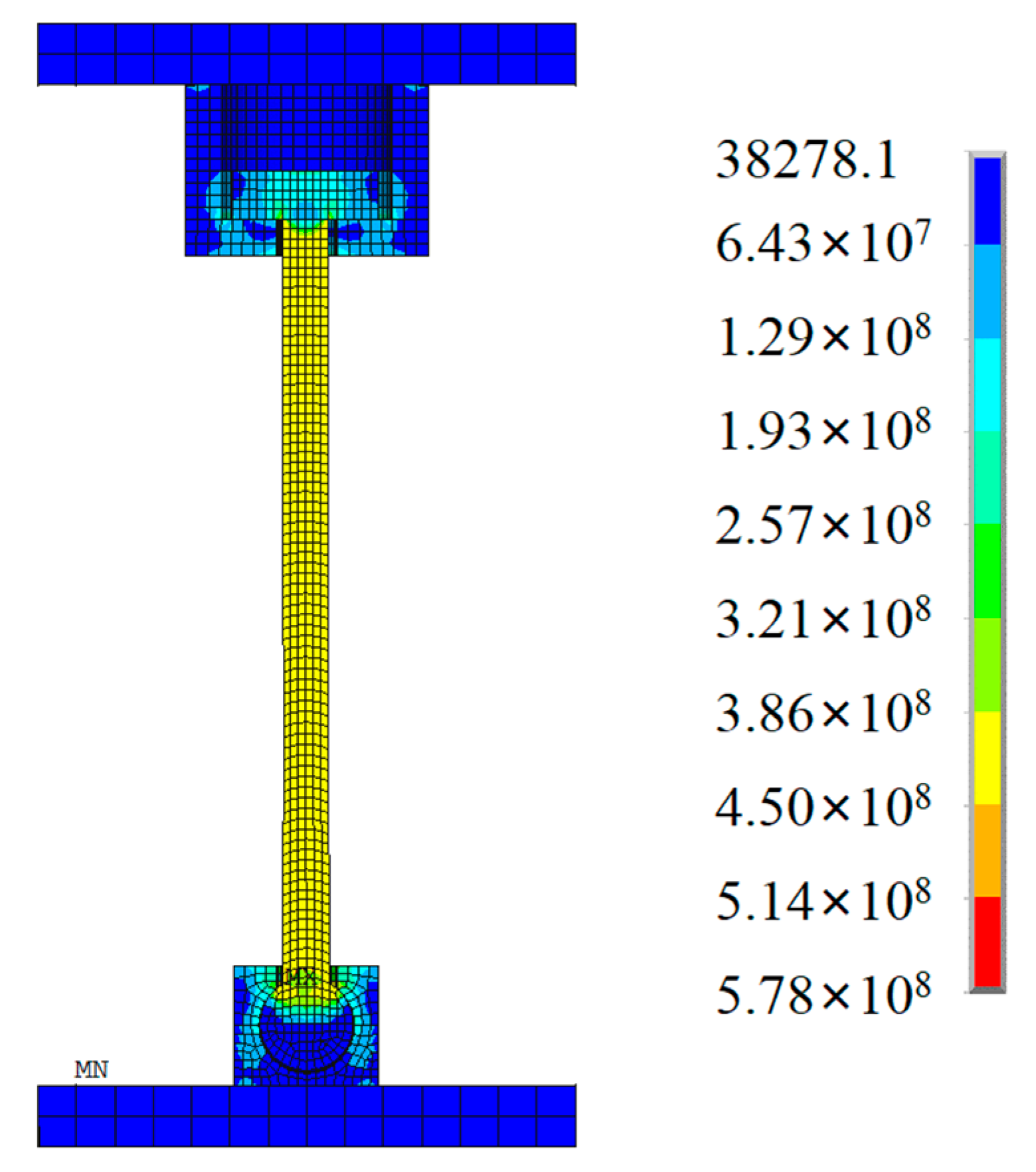
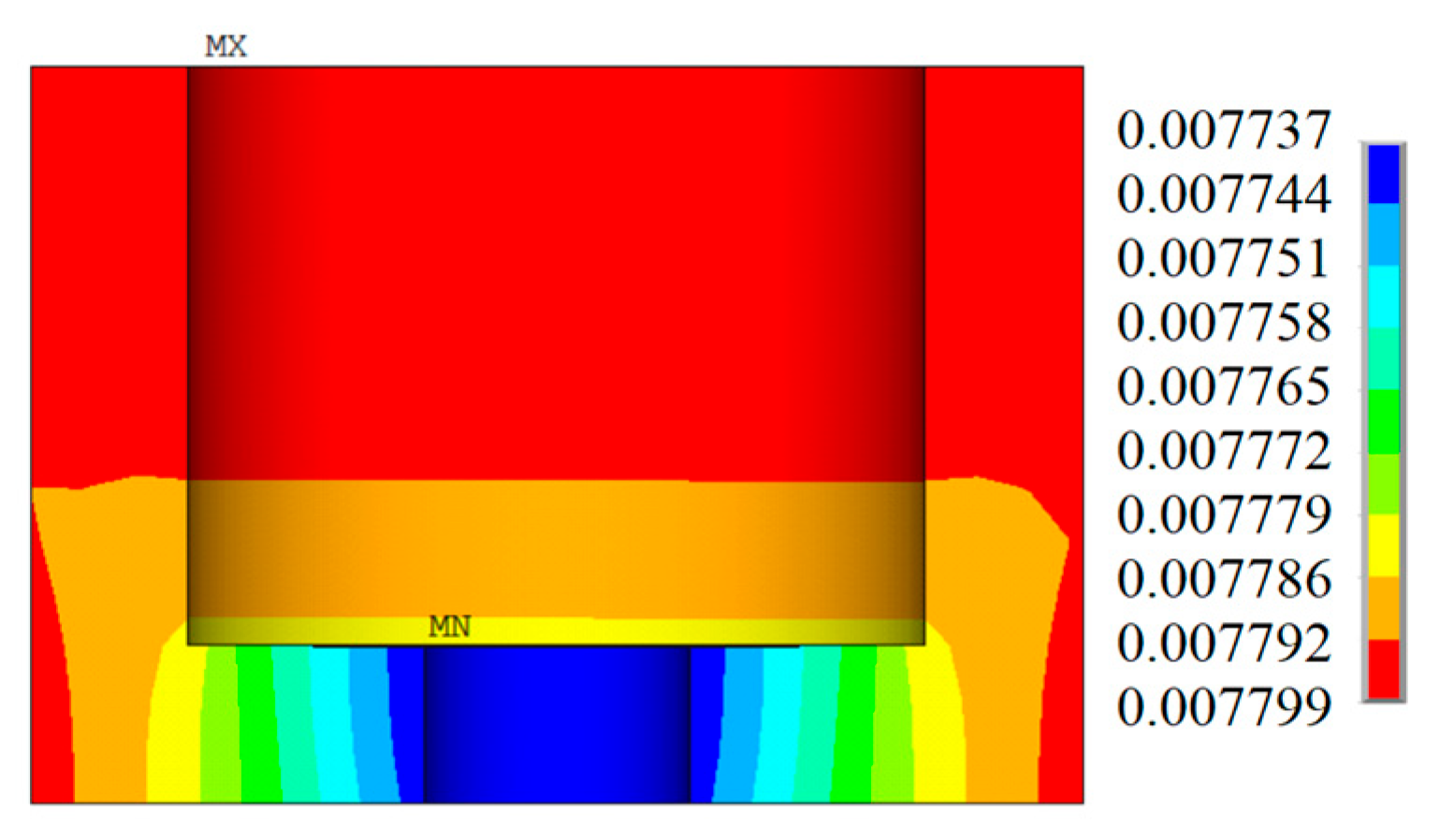
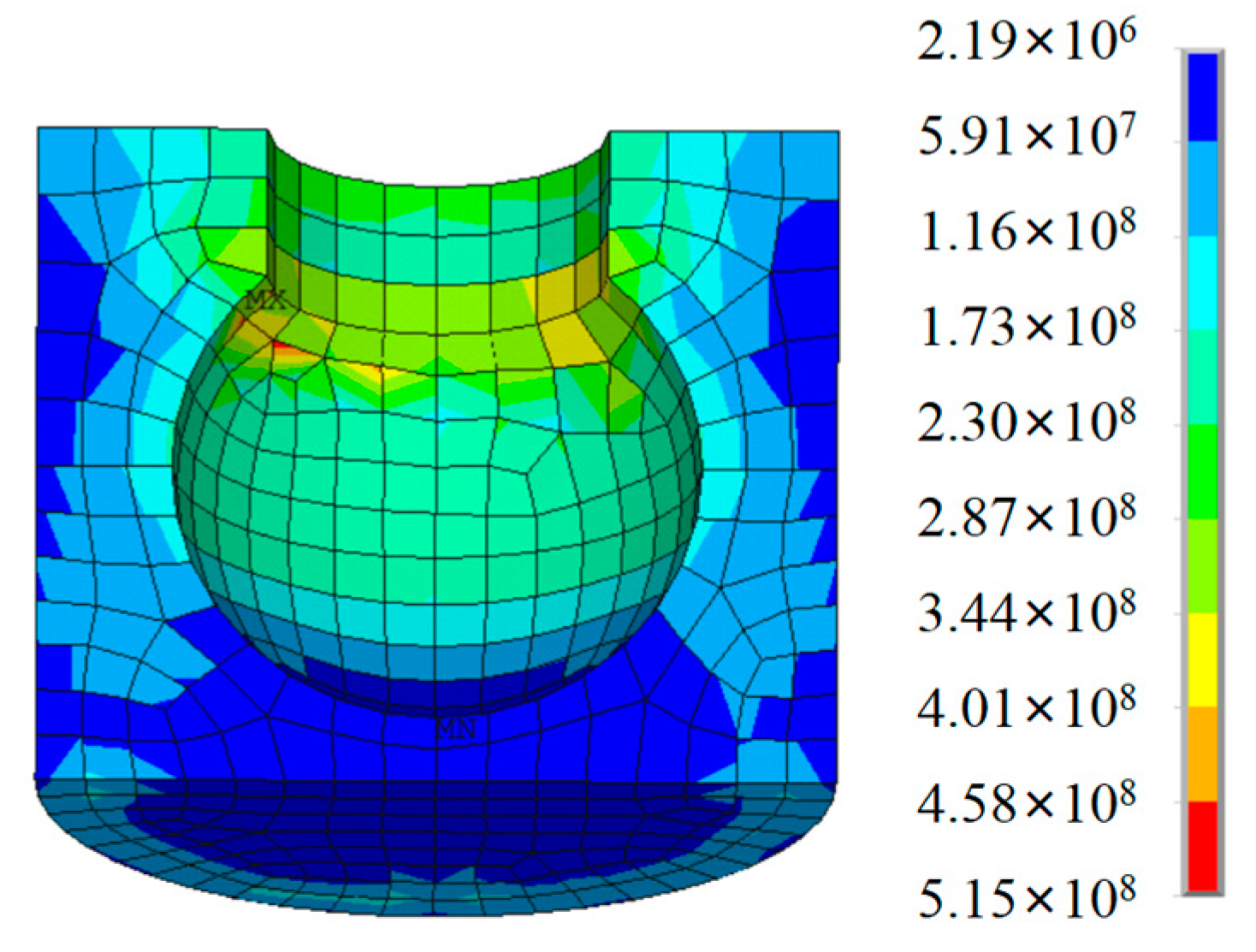
4.3. Modeling Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Warn, G.P.; Ryan, K.L. A review of seismic isolation for buildings: Historical development and research needs. Buildings 2012, 2, 300–325. [Google Scholar] [CrossRef]
- Zhang, C.; Ali, A. The advancement of seismic isolation and energy dissipation mechanisms based on friction. Soil Dyn. Earthq. Eng. 2021, 146, 106746. [Google Scholar] [CrossRef]
- Zhuang, P.; Zhao, W.; Yang, T.Y. Seismic protection of a single-layer spherical lattice shell structure using a separated three-dimensional isolation system. Soil Dyn. Earthq. Eng. 2023, 172, 108026. [Google Scholar] [CrossRef]
- Zhuang, P.; Wei, L.; Wang, W.; Han, M. Feasibility evaluation of pre-pressed spring devices for vertical isolation of single-layer spherical lattice shell structures. Soil Dyn. Earthq. Eng. 2022, 158, 107308. [Google Scholar] [CrossRef]
- Yong-Chul, K.; Xue, S.; Zhuang, P.; Zhao, W.; Li, C. Seismic isolation analysis of FPS bearings in spatial lattice shell structures. Earthq. Eng. Eng. Vib. 2010, 9, 93–102. [Google Scholar] [CrossRef]
- Demetriades, G.F.; Constantinou, M.C.; Reinhorn, A.M. Study of wire rope systems for seismic protection of equipment in buildings. Eng. Struct. 1993, 15, 321–334. [Google Scholar] [CrossRef]
- Pellecchia, D.; Vaiana, N.; Spizzuoco, M.; Serino, G.; Rosati, L. Axial hysteretic behaviour of wire rope isolators: Experiments and modelling. Mater. Des. 2023, 225, 111436. [Google Scholar] [CrossRef]
- Eltahawy, W.; Ryan, K.L.; Cesmeci, S.; Gordaninejad, F. Parameters Affecting Dynamics of Three-Dimensional Seismic Isolation. J. Earthq. Eng. 2018, 25, 730–755. [Google Scholar] [CrossRef]
- Politopoulos, I.; Moussallam, N. Horizontal floor response spectra of base-isolated buildings due to vertical excitation. Earthq. Eng. Struct. Dyn. 2012, 41, 587–592. [Google Scholar] [CrossRef]
- Pourmasoud, M.M.; Lim, J.B.; Hajirasouliha, I.; McCrum, D. Multi-directional base isolation system for coupled horizontal and vertical seismic excitations. J. Earthq. Eng. 2022, 26, 1145–1170. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, Y.; Hu, X.; Weng, D. Seismic performance upgrading of containment structures using a negative-stiffness amplification system. Eng. Struct. 2022, 262, 114394. [Google Scholar] [CrossRef]
- Liu, W.; Tian, K.; Wei, L.; He, W.; Yang, Q. Earthquake response and isolation effect analysis for separation type three-dimensional isolated structure. Bull. Earthq. Eng. 2018, 16, 6335–6364. [Google Scholar] [CrossRef]
- Kageyama, M.; Iba, T.; Somaki, T.; Hino, H.; Umeki, K. Development of cable reinforced 3-dimensional base isolation air spring. In Proceedings of the ASME Pressure Vessels and Piping Conference, Vancouver, BC, Canada, 5–9 August 2002. [Google Scholar]
- Eltahawy, W.; Ryan, K.; Cesmeci, S.; Gordaninejad, F. Displacement/velocity-based control of a liquid spring-MR damper for vertical isolation. Struct. Control. Health Monit. 2019, 26, e2363. [Google Scholar] [CrossRef]
- Cesmeci, S.; Gordaninejad, F.; Ryan, K.L.; Eltahawy, W. A liquid spring–magnetorheological damper system under combined axial and shear loading for three-dimensional seismic isolation of structures. J. Intell. Mater. Syst. Struct. 2018, 29, 3517–3532. [Google Scholar] [CrossRef]
- Chen, Z.; Ding, Y.; Shi, Y.; Li, Z. A vertical isolation device with variable stiffness for long-span spatial structures. Soil Dyn. Earthq. Eng. 2019, 123, 543–558. [Google Scholar] [CrossRef]
- Xu, H.; He, W.; Zhang, L.; Liu, W. Shaking table test of a novel Three-dimensional seismic isolation system with inclined rubber bearings. Eng. Struct. 2023, 293, 116609. [Google Scholar] [CrossRef]
- Dai, K.; Yang, Y.; Li, T.; Ge, Q.; Wang, J.; Wang, B.; Chen, P.; Huang, Z. Seismic analysis of a base-isolated reinforced concrete frame using high damping rubber bearings considering hardening characteristics and bidirectional coupling effect. Structures 2022, 46, 698–712. [Google Scholar] [CrossRef]
- Wu, D.; Xiong, Y.; Yang, Z. Numerical and experimental study of mechanical behaviors of the steel-confined rubber bearing. Constr. Build. Mater. 2022, 352, 128900. [Google Scholar] [CrossRef]
- Zhang, H.; Liang, X.; Gao, Z.; Zhu, X. Seismic performance analysis of a large-scale single-layer lattice dome with a hybrid three-directional seismic isolation system. Eng. Struct. 2020, 214, 110627. [Google Scholar] [CrossRef]
- Zhang, C.-X.; Nie, G.-B.; Dai, J.-W.; Liu, K.; Zhi, X.-D.; Ma, H.-H. Seismic isolation research on a double-layer lattice structure using shaking table tests. Int. J. Steel Struct. 2019, 19, 1237–1248. [Google Scholar] [CrossRef]
- Han, Q.; Jing, M.; Lu, Y.; Liu, M. Mechanical behaviors of air spring-FPS three-dimensional isolation bearing and isolation performance analysis. Soil Dyn. Earthq. Eng. 2021, 149, 106872. [Google Scholar] [CrossRef]
- Dong, W.; Shi, Y.; Wang, Q.; Wang, Y.; Yan, J.-B. Development of a long-period vertical base isolation device with variable stiffness for steel frame structures. Soil Dyn. Earthq. Eng. 2023, 164, 107638. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Vibration Isolation Bearing Type | Stiffness of Steel Tension Rod /(kN/mm) | Tonnage of Steel Tension Rod/Ton | Initial Clearance of Steel Tension Rod/mm |
|---|---|---|---|---|
| 1-1 | Steel Spring Bearing | - | - | - |
| 2-1 | New Anti-Rocking Bearing | 1500 | 100 | 5 |
| 2-2 | 2250 | 150 | ||
| 2-3 | 3000 | 200 | ||
| 2-4 | 3750 | 250 | ||
| 3-1 | New Anti-Rocking Bearing | 2250 | 150 | 2 |
| 3-2 | 5 | |||
| 3-3 | 8 | |||
| 3-4 | 10 | |||
| 3-5 | 15 |
| Steel Category | Steel Yield Strength/MPa | Ultimate Tensile Strength/MPa | Elongation after Fracture/% | Elastic Modulus (GPa) | Remarks |
|---|---|---|---|---|---|
| Special Steel | 438.1 | 994.0 | 67.8 | 195 | Measured value |
| Q235B | 235 | 375~460 | >26 | 206 | Different plate thickness, the performance is different |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Kong, F.; Bu, L.; Mu, Z. Design and Analysis of Novel Anti-Rocking Bearing. Buildings 2024, 14, 1645. https://doi.org/10.3390/buildings14061645
Yang Y, Kong F, Bu L, Mu Z. Design and Analysis of Novel Anti-Rocking Bearing. Buildings. 2024; 14(6):1645. https://doi.org/10.3390/buildings14061645
Chicago/Turabian StyleYang, Yuqing, Fanchang Kong, Longgui Bu, and Zaigen Mu. 2024. "Design and Analysis of Novel Anti-Rocking Bearing" Buildings 14, no. 6: 1645. https://doi.org/10.3390/buildings14061645