

Intelligent Identification of Surrounding Rock Grades Based on a Self-Developed Rock Drilling Test System
Abstract
:1. Introduction
2. Development of the Rock Drilling Testing System
2.1. Working Performance of the Down-the-Hole Drill Rig
- (1)
- Propulsion speed: This measures the drilling speed of the drill bit under various pressures. While multiple factors affect the propulsion speed, it generally reflects the rock mass’s strength and integrity. In general, the speed decreases with increasing rock hardness or integrity.
- (2)
- Impact pressure: This is the air pressure transferred from the compressor to the hammer in the down-the-hole drilling rig during impact drilling. As the main factor in breaking surrounding rock, impact pressure increases with rock hardness. Additionally, more impact pressure is required for intact rock masses of the same hardness, as they need more force to fracture. Therefore, as rock integrity improves, the average impact pressure required also increases.
- (3)
- Rotary pressure: This is the oil pressure in the hydraulic cylinder during rotary motion. After the impact, some of the rock mass may remain partially fractured. Under the rotary mechanism, the drill bit rotates, changing its angle to fully crush the rock. Due to the positive correlation between shear and uniaxial compressive strength, rotary pressure rises with increased rock hardness. Also, more intact rock masses require higher rotary pressure, as more rock needs to be cut during rotation.
- (4)
- Propulsion pressure: This is the oil pressure in the hydraulic cylinder during forward movement. Propulsion pressure ensures the drill bit remains in close contact with the rock. Higher propulsion pressure is needed to maintain this contact when rock strength is higher. More intact rock masses also require higher propulsion pressure because they generate stronger reverse impact pressures, increasing the propulsion force required. Therefore, as rock hardness or integrity increases, so too does the propulsion pressure.
2.2. Development of the Rock Drilling Testing System
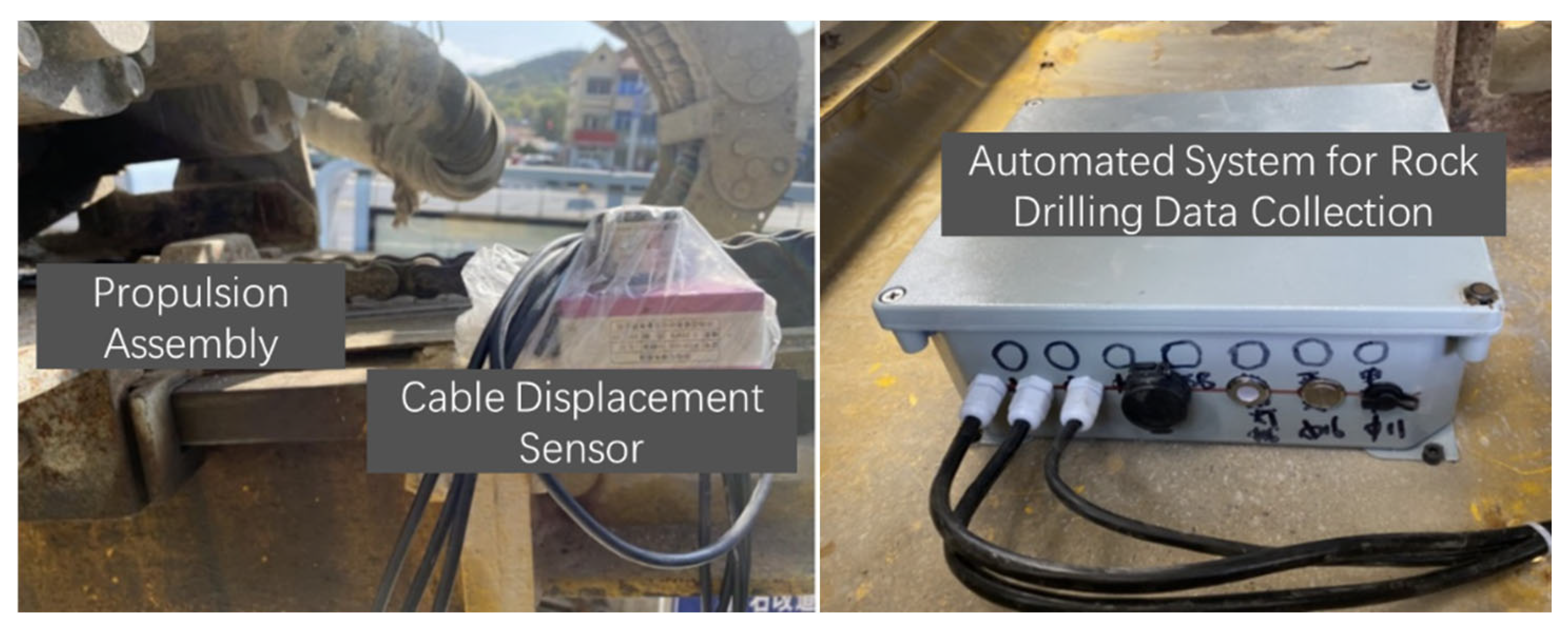
2.2.1. Propulsion Speed Acquisition System
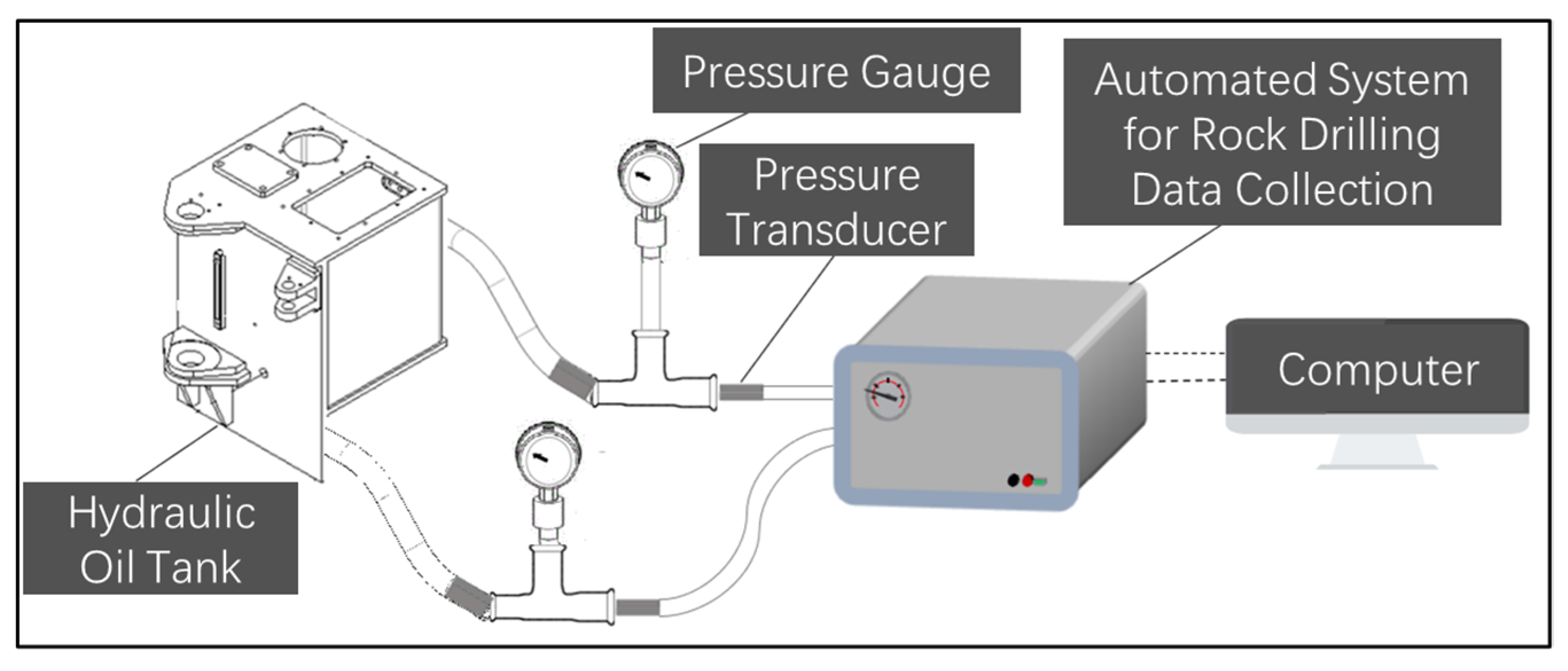
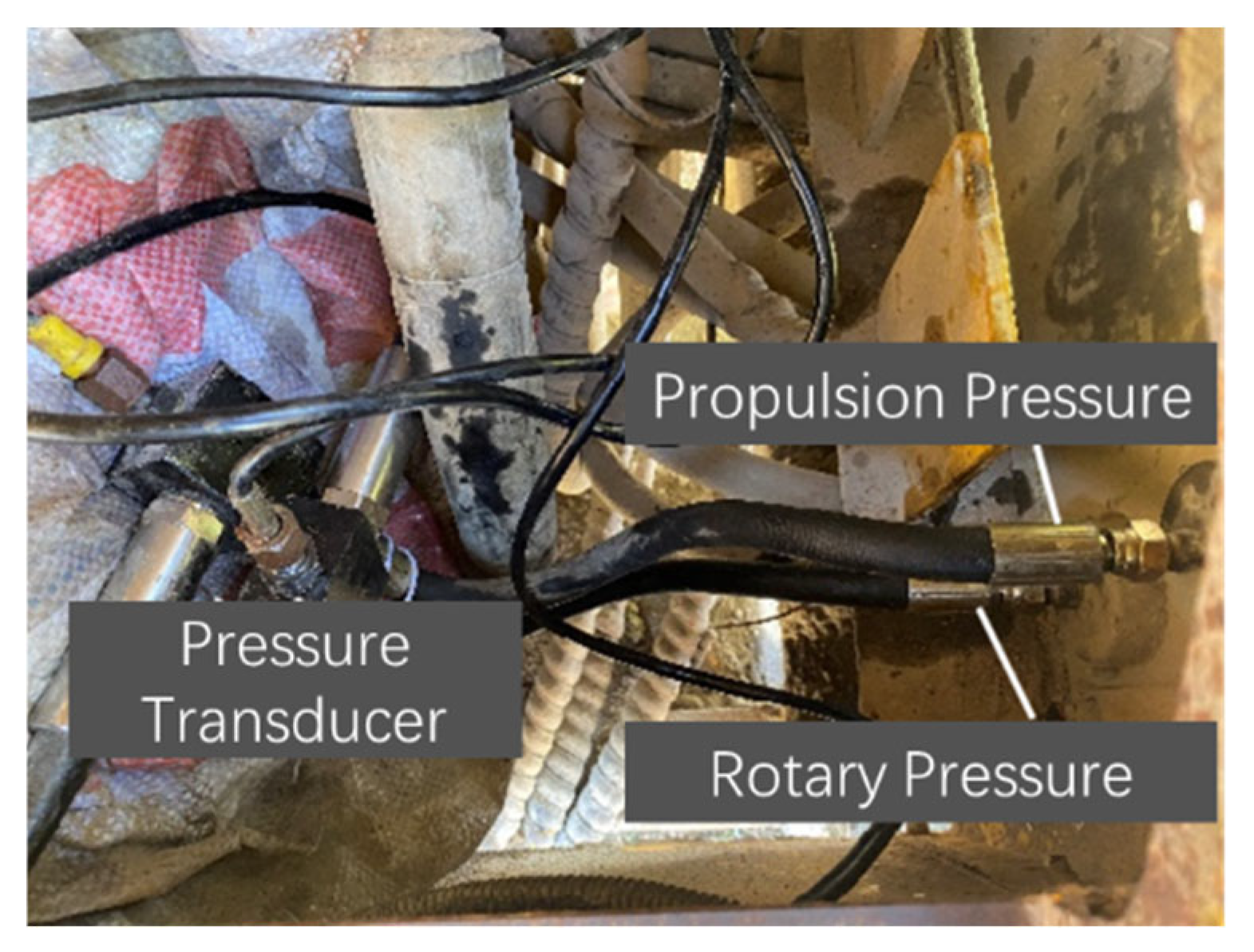
2.2.2. Hydraulic Pressure Acquisition System
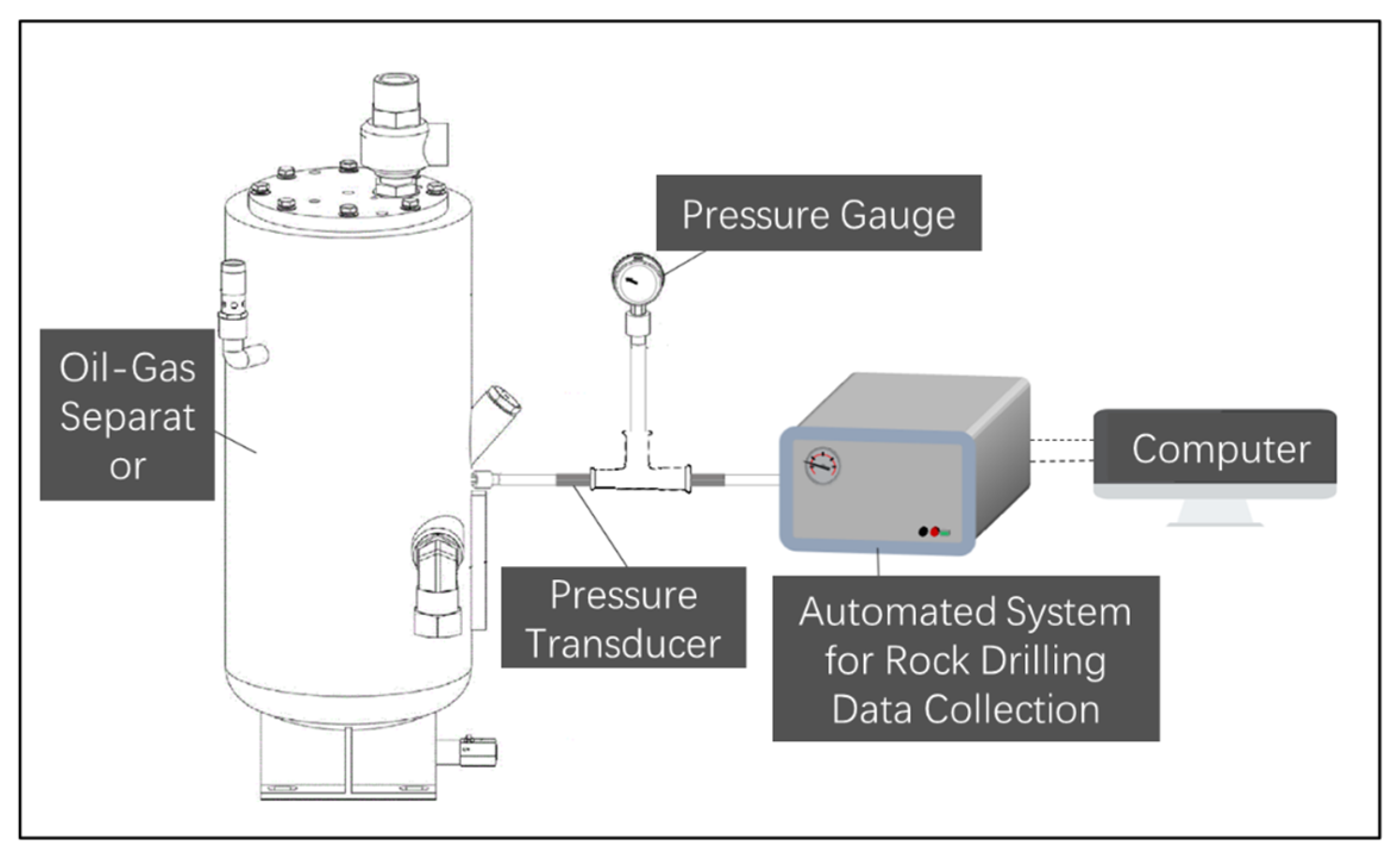
2.2.3. Air Pressure Acquisition System
2.2.4. Automatic Data Acquisition System
3. Data Collection and Correlation Analysis
3.1. Data Collection
- When Rc > 90 Kv + 30, Rc should be set to 90 Kv + 30 and Kv should be substituted into the equation to calculate the BQ value.
- When Kv > 0.04 Rc + 0.4, Kv should be set to 0.04 Rc + 0.4 and Rc should be substituted into the equation to calculate the BQ value.
3.2. Correlation Analysis
- (1)
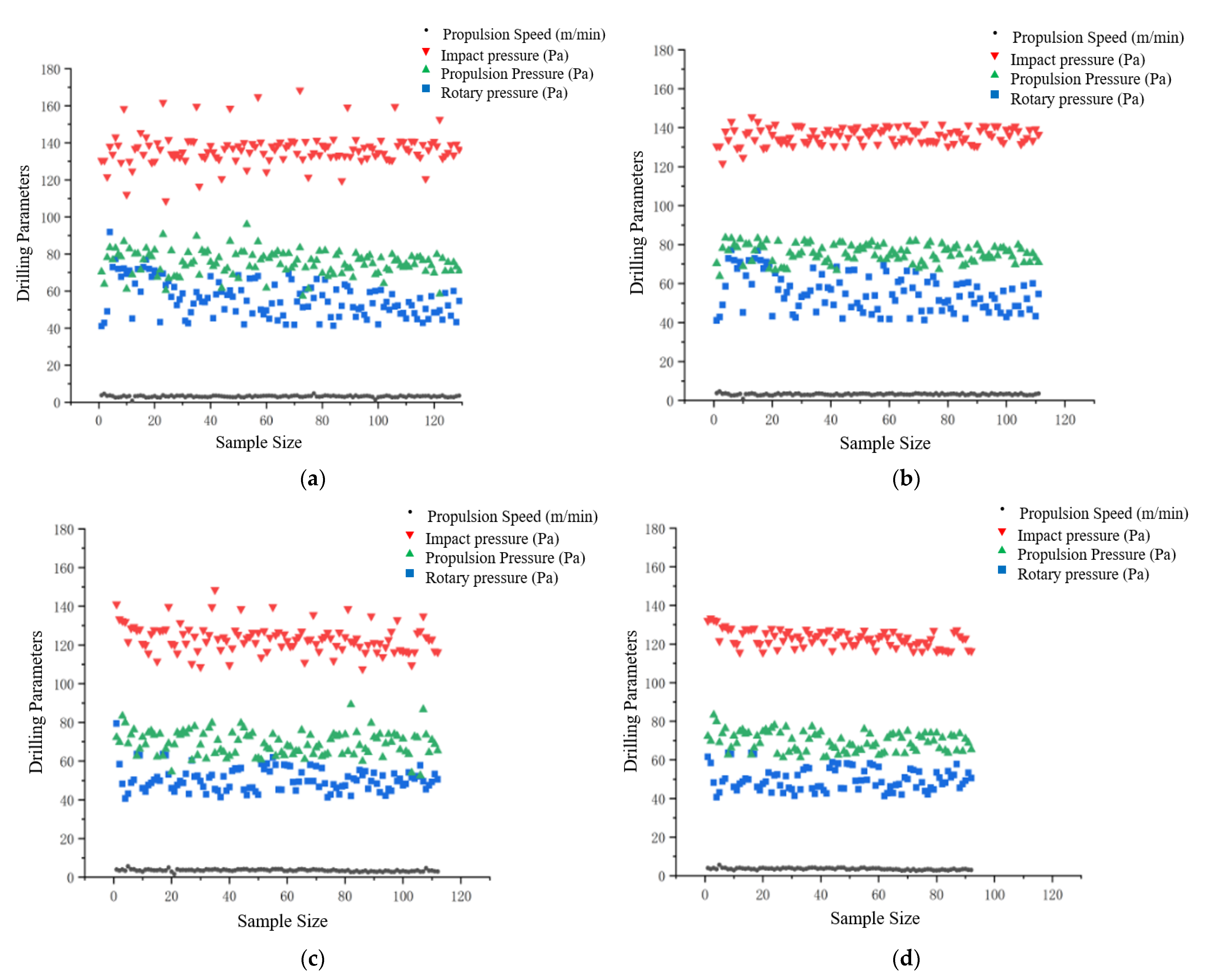
- For any drilling parameter, each surrounding rock classification corresponds to a specific distribution range, indicating a correlation between drilling parameters and surrounding rock grades. However, there is significant overlap in the distribution ranges of drilling parameters for different surrounding rock classifications, making it challenging to accurately identify the grade using a single parameter alone.
- (2)
- Comparing the density distribution of different drilling parameters with surrounding rock classifications reveals a monotonic change in the distribution ranges of propulsion speed, impact pressure, rotary pressure, and propulsion pressure as the surrounding rock grade increases.
- (1)
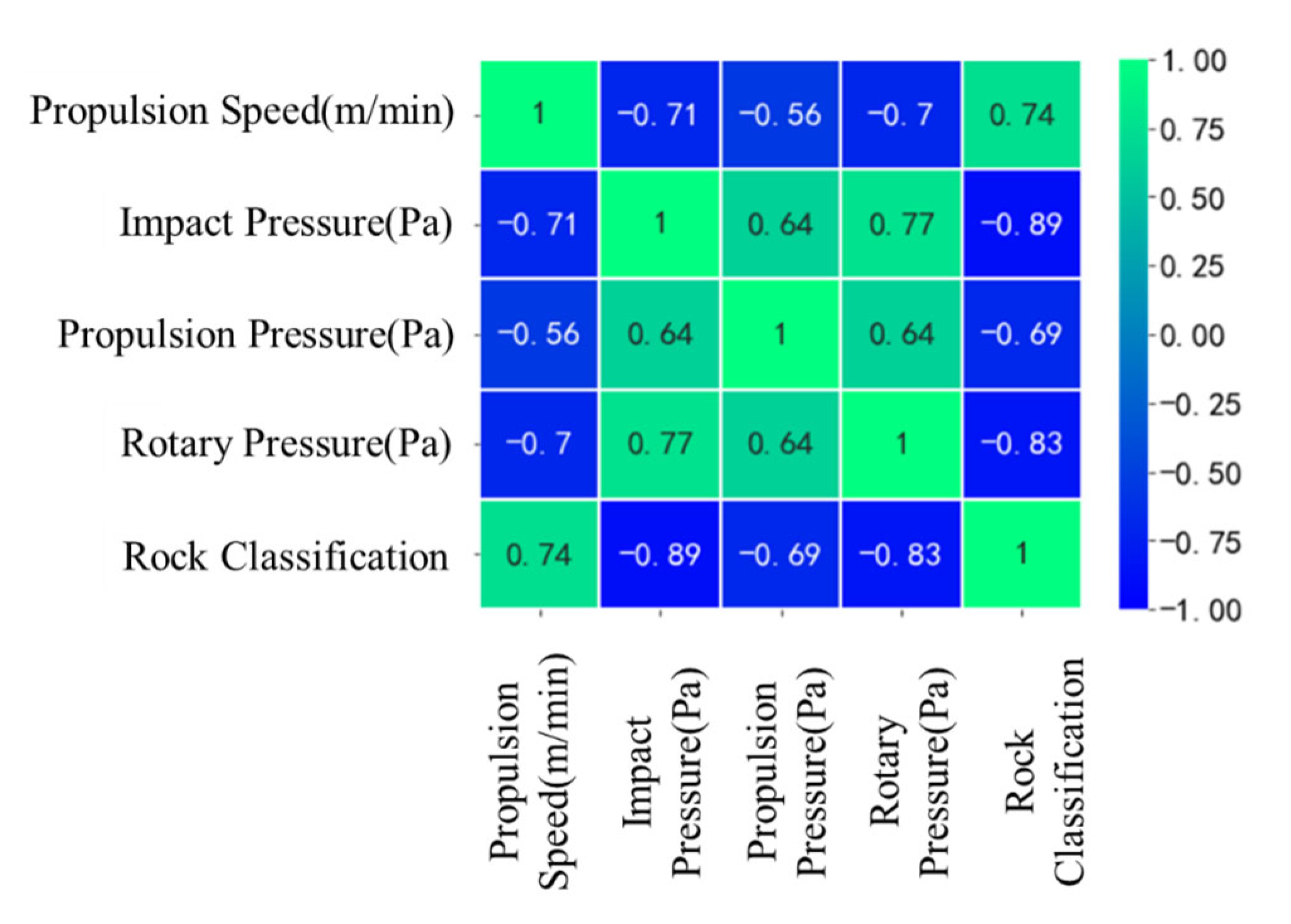
- The absolute values of the correlation coefficients (ρ) for the four drilling parameters with the surrounding rock classification are all greater than 0.6, indicating a strong correlation between these parameters and rock classification.
- (2)
- Propulsion speed shows a positive correlation with surrounding rock classification, whereas impact pressure, propulsion pressure, and rotary pressure all display a negative correlation.
- (3)
- The absolute value of the correlation coefficient is highest between impact pressure and surrounding rock classification, suggesting the strongest correlation. It is followed by rotary pressure (−0.83), propulsion speed (0.74), and propulsion pressure (−0.69).
4. Data Preprocessing
4.1. Removing Outliers
4.2. Data Standardization and Dataset Division
5. Intelligent Rock Classification
5.1. Random Forest
- (1)
- Random sampling: Using the bootstrap method, it repeatedly samples n samples with replacement from the original training data to form a bootstrap sample set.
- (2)
- Decision tree construction: For each bootstrap sample set, a subset of features is randomly selected to build a decision tree. This random selection ensures that each tree is different and aims to improve the model’s generalization ability.
- (3)
- Decision tree integration: Once a sufficient number of decision trees are built, each tree provides a classification result for new input data. The random forest algorithm aggregates these results through a voting mechanism to determine the final classification.
5.2. Rock Mass Classification Results
6. Conclusions
- (1)
- With displacement sensors and pressure transmitters as core components, a feed speed acquisition system, an oil pressure acquisition system, and an air pressure acquisition system were developed. Using an ADC (analog-to-digital converter), an encoder, and a flash storage chip, an automatic data acquisition system was developed. This system can collect data twice per second and has the advantages of high precision, low power consumption, and high stability. Together, these four systems form the rock drilling testing system, enabling the down-the-hole drilling rig to automatically collect and store impact pressure, rotation pressure, feed pressure, and feed speed in real time during the drilling process. This greatly improves the efficiency and accuracy of data acquisition.
- (2)
- By analyzing kernel density plots and Pearson correlation heatmaps between drilling parameters and rock mass grades, it was found that a single drilling parameter is insufficient for determining rock mass grades. The rock mass grade has a strong positive correlation with feed speed and a strong negative correlation with impact pressure, feed pressure, and rotation pressure. Specifically, the correlation with impact pressure and rotation pressure is strongly negative, with correlation coefficients both exceeding 0.8.
- (3)
- Outliers were removed using an interval method, and the dataset was standardized, effectively improving model robustness. The random forest model used in this study has excellent rock mass classification performance, with precision, recall, and F1 scores all exceeding 0.9. Classification performance across rock mass grades is fairly balanced, and the model demonstrates good generalizability.
- (4)
- The rock drilling test system efficiently acquires drilling parameters, and the random forest model can accurately classify rock mass grades based on these parameters. Combining the two forms an intelligent tunnel rock mass classification system, which plays a critical role in determining tunnel excavation plans and quality evaluation. This system can effectively promote the transition and upgrade of tunnel construction processes from traditional operations to intelligent ones.
7. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kumar, P.; Mohammadi, H.; Chopra, R.; Kumar Tyagi, S.; Kumar Pandey, S. A Newly Developed Blasting Cut in Tunnels; Application of “Combined Method” in Small to Medium-Sized Tunnels. Tunn. Undergr. Space Technol. 2023, 142, 105426. [Google Scholar] [CrossRef]
- Wang, M.; Zhao, S.; Tong, J.; Wang, Z.; Yao, M.; Li, J.; Yi, W. Intelligent Classification Model of Surrounding Rock of Tunnel Using Drilling and Blasting Method. Undergr. Space 2021, 6, 539–550. [Google Scholar] [CrossRef]
- Barton, N. Some New Q-Value Correlations to Assist in Site Characterisation and Tunnel Design. Int. J. Rock Mech. Min. Sci. 2002, 39, 185–216. [Google Scholar] [CrossRef]
- Jiang, F.; He, P.; Wang, G.; Zheng, C.; Xiao, Z.; Wu, Y.; Lv, Z. Q-Method Optimization of Tunnel Surrounding Rock Classification by Fuzzy Reasoning Model and Support Vector Machine. Soft Comput. 2022, 26, 7545–7558. [Google Scholar] [CrossRef]
- Somodi, G.; Bar, N.; Kovács, L.; Arrieta, M.; Török, Á.; Vásárhelyi, B. Study of Rock Mass Rating (RMR) and Geological Strength Index (GSI) Correlations in Granite, Siltstone, Sandstone and Quartzite Rock Masses. Appl. Sci. 2021, 11, 3351. [Google Scholar] [CrossRef]
- Zhang, Q.; Huang, X.; Zhu, H.; Li, J. Quantitative Assessments of the Correlations between Rock Mass Rating (RMR) and Geological Strength Index (GSI). Tunn. Undergr. Space Technol. 2019, 83, 73–81. [Google Scholar] [CrossRef]
- Jiang, W.; Wang, Y.; Yang, J.; Zhang, Z. Surrounding Rock Quality Evaluation and Application Development for Highway Tunnel Based on Engineering Applicability. Bull. Eng. Geol. Environ. 2023, 82, 115. [Google Scholar] [CrossRef]
- Qiu, D.; Fu, K.; Xue, Y.; Tao, Y.; Kong, F.; Bai, C. TBM Tunnel Surrounding Rock Classification Method and Real-Time Identification Model Based on Tunneling Performance. Int. J. Geomech. 2022, 22, 04022070. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, J.; Pan, Y.; Kong, X.; Hong, K. A Case Study of TBM Performance Prediction Using a Chinese Rock Mass Classification System—Hydropower Classification (HC) Method. Tunn. Undergr. Space Technol. 2017, 65, 140–154. [Google Scholar] [CrossRef]
- Xie, H.T. Bayesian Network Based Expert System for Tunnel Surrounding Rockmass Classification. Appl. Mech. Mater. 2013, 482, 248–251. [Google Scholar] [CrossRef]
- Niu, G.; He, X.; Xu, H.; Dai, S. Development of Rock Classification Systems: A Comprehensive Review with Emphasis on Artificial Intelligence Techniques. Eng 2024, 5, 217–245. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, M.; Yi, W.; Yang, D.; Tong, J. Intelligent Classification of Surrounding Rock of Tunnel Based on 10 Machine Learning Algorithms. Appl. Sci. 2022, 12, 2656. [Google Scholar] [CrossRef]
- Zheng, S.; Jiang, A.N.; Yang, X.R.; Luo, G.C. A New Reliability Rock Mass Classification Method Based on Least Squares Support Vector Machine Optimized by Bacterial Foraging Optimization Algorithm. Adv. Civ. Eng. 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- Jalalifar, H.; Mojedifar, S.; Sahebi, A.A.; Nezamabadi-pour, H. Application of the Adaptive Neuro-Fuzzy Inference System for Prediction of a Rock Engineering Classification System. Comput. Geotech. 2011, 38, 783–790. [Google Scholar] [CrossRef]
- Hasegawa, N.; Hasegawa, S.; Kitaoka, T.; Ohtsu, H. Applicability of Neural Network in Rock Classification of Mountain Tunnel. Mater. Trans. 2019, 60, 758–764. [Google Scholar] [CrossRef]
- Bressan, T.S.; Kehl De Souza, M.; Girelli, T.J.; Junior, F.C. Evaluation of Machine Learning Methods for Lithology Classification Using Geophysical Data. Comput. Geosci. 2020, 139, 104475. [Google Scholar] [CrossRef]
- Liu, X.; Wang, H.; Jing, H.; Shao, A.; Wang, L. Research on Intelligent Identification of Rock Types Based on Faster R-CNN Method. IEEE Access 2020, 8, 21804–21812. [Google Scholar] [CrossRef]
- Song, S.; Xu, G.; Bao, L.; Xie, Y.; Lu, W.; Liu, H.; Wang, W. Classifying the Surrounding Rock of Tunnel Face Using Machine Learning. Front. Earth Sci. 2023, 10, 1052117. [Google Scholar] [CrossRef]
- Tan, F.; You, M.; Zuo, C.; Jiao, Y.-Y.; Tian, H. Simulation of Rock-Breaking Process by Drilling Machine and Dynamic Classification of Surrounding Rocks. Rock Mech. Rock Eng. 2022, 55, 423–437. [Google Scholar] [CrossRef]
- Torno, S.; Toraño, J.; Menéndez, M.; Gent, M.; Velasco, J. Mathematical and fuzzy logic models in prediction of geological and geomechanical properties of rock mass by excavation data on underground works. J. Civ. Eng. Manag. 2011, 17, 197–206. [Google Scholar] [CrossRef]
- Mostofi, M.; Rasouli, V.; Mawuli, E. An Estimation of Rock Strength Using a Drilling Performance Model: A Case Study in Blacktip Field, Australia. Rock Mech. Rock Eng. 2011, 44, 305–316. [Google Scholar] [CrossRef]
- Kalantari, S.; Hashemolhosseini, H.; Baghbanan, A. Estimating Rock Strength Parameters Using Drilling Data. Int. J. Rock Mech. Min. Sci. 2018, 104, 45–52. [Google Scholar] [CrossRef]
- Kalantari, S.; Baghbanan, A.; Hashemalhosseini, H. An Analytical Model for Estimating Rock Strength Parameters from Small-Scale Drilling Data. J. Rock Mech. Geotech. Eng. 2019, 11, 135–145. [Google Scholar] [CrossRef]
- Lakshminarayana, C.R.; Tripathi, A.K.; Pal, S.K. Prediction of Mechanical Properties of Sedimentary Type Rocks Using Rotary Drilling Parameters. Geotech. Geol. Eng. 2020, 38, 4863–4876. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rock Hardness | f = 6~18 |
| Borehole Diameter | 90~146 mm |
| Borehole Depth | 30 m |
| Lowest Horizontal Hole | 500 mm |
| Highest Horizontal Hole | 3200 mm |
| Travel Speed | 2.5 km/h |
| Climbing Gradient | 30° |
| Gradient for Trailing Compressor | 15° |
| Rotation Speed | 0~170 r/min |
| Rotation Torque | 2960 Nm |
| Compensation Length | 900 mm |
| Operating Pressure | 0.7~1.7 MPa |
| Air Consumption | 9~14 m3/min |
| Minimum Ground Clearance | 472 mm |
| Propulsion Beam Tilt | Tilt down 105°, up 13° |
| Propulsion Beam Swing | Right 5°, Left 90° (or Right 90°, Left 5°) |
| Boom Tilt Angle | Up 49°, Down 25° |
| Boom Swing Angle (Horizontal Boom) | Left 27°, Right 29° |
| Dimensions (Transport State) L × W × H | 6500 × 2110 × 2400 mm |
| Diesel Tank Capacity | 85 L |
| Hydraulic Oil Tank Capacity | 188 L |
| Total Weight | 5.95 t |
| No. | Drilling Parameter | Sensor | Measurement Method |
|---|---|---|---|
| 1 | Propulsion Speed | Displacement Sensor | After drilling begins, data are collected twice per second. Every 512 bytes of data are stored once the buffer is full. The displacement measured by the sensor is divided by time to obtain the propulsion speed. |
| 2 | Impact Pressure | Air Pressure Sensor | Using a 141.5H-141.5A tee fitting, the air pressure sensor is connected to the tee and data are transferred through a high-pressure oil pipe to a custom data acquisition and storage system. |
| 3 | Rotary Pressure | Hydraulic Pressure Sensor | Using a 141.5H-141.5A tee fitting, the hydraulic pressure sensor is connected to the tee, and data are transferred through a high-pressure oil pipe to the custom data acquisition and storage system. |
| 4 | Propulsion Pressure | Hydraulic Pressure Sensor | Using a 141.5H-141.5A tee fitting, the hydraulic pressure sensor is connected to the tee, and data are transferred through a high-pressure oil pipe to the custom data acquisition and storage system. |
| Parameter | Value |
|---|---|
| Signal Output | Digital (pulse) signal |
| Measurement Range | 0–3500 mm |
| Signal Type | Differential, open circuit, push–pull, voltage, RS485/232 |
| Resolution | 0.01/0.02/0.05 (selectable) |
| Linearity Accuracy | 0.05% FS |
| Repeatability | 0.01% |
| Maximum Speed | 1000 mm/s |
| Wire Rope | High-flex imported plastic-coated steel wire |
| Pull Force at Cable Outlet | 5 N |
| Service Life | 2 million cycles |
| Operating Voltage | 5 V, 5–24 V, 10–30 V |
| Operating Temperature | −25–75 °C |
| Protection Rating | IP54 (standard), IP65 (optional) |
| Housing Material | Imported aluminum alloy, anti-static, nonconductive |
| Parameter | Specification |
|---|---|
| Pressure Type | Gauge pressure, negative pressure, absolute pressure |
| Material | Core: 316 stainless steel; Shell: 316 stainless steel |
| Output Signal | 4–20 mA, 0–5 VDC, 0–10 VDC, 1–5 VDC |
| Ambient Temperature | −40 to 85 °C |
| Overload Capacity | 200% FS |
| Vibration Resistance | 25 g (20–2000 Hz) |
| Response Frequency | ≤500 Hz |
| Measuring Range | 0–30 MPa |
| Accuracy | 0.5% |
| Power Supply | 24 V DC |
| Output | 4–20 mA |
| Technical Parameter | Parameter Value |
|---|---|
| DC Voltage | 4.50 V (min) |
| Supply Current | 15 mA |
| Operating Temperature (Max/Min) | 70 °C/0 °C |
| Supply Voltage (Max/Min) | 5.5 V/4.5 V |
| Parameter Name | Specification |
|---|---|
| Mounting Style | SMD/SMT |
| Package | WSON-8 |
| Maximum Frequency | 133 MHz |
| Interface Type | SPI |
| Data Bus Width | 8-bit |
| Supply Voltage (Max/Min) | 1.95 V/1.7 V |
| Operating Temperature (Max/Min) | 85 °C/−40 °C |
| Rock Mass Grade | Qualitative Characteristics of Rock Mass Quality | BQ Value |
|---|---|---|
| I | Hard rock, intact rock mass. | >550 |
| II | Hard rock, relatively intact rock mass; Moderately hard rock, intact rock mass. | 550~451 |
| III | Hard rock, moderately fractured rock mass; Moderately hard rock, relatively intact rock mass; Moderately soft rock, intact rock mass. | 450~351 |
| IV | Hard rock, fractured rock mass; Moderately hard rock, moderately fractured to fractured rock mass; Moderately soft rock, relatively intact to moderately fractured rock mass; Soft rock, intact to relatively intact rock mass. | 350~251 |
| V | Moderately soft rock, fractured rock mass; Soft rock, moderately fractured to fractured rock mass; All extremely soft rocks and all extremely fractured rocks. | ≤250 |
| Propulsion Speed (m/min) | Impact Pressure (Pa) | Propulsion Pressure (Pa) | Rotary Pressure (Pa) | Rock Classification | Sample Size |
|---|---|---|---|---|---|
| 0.91 | 135.08 | 87.11 | 99.37 | Grade 2 | 76 |
| 1.04 | 137.95 | 76.33 | 91.12 | ||
| 1.37 | 133.88 | 77.02 | 94.15 | ||
| 0.96 | 153.25 | 74.26 | 95.04 | ||
| … | … | … | … | ||
| 1.41 | 144.34 | 63.38 | 84.12 | Grade 3 | 119 |
| 1.62 | 143.36 | 62.15 | 81.56 | ||
| 1.89 | 147.86 | 70.12 | 95.14 | ||
| 1.64 | 151.77 | 70.03 | 96.58 | ||
| … | … | … | … | ||
| 2.32 | 143.12 | 77.33 | 83.22 | Grade 4 | 129 |
| 2.14 | 138.86 | 72.12 | 79.86 | ||
| 2.35 | 129.43 | 67.72 | 78.58 | ||
| 2.18 | 138.89 | 72.23 | 79.81 | ||
| … | … | … | … | ||
| 3.28 | 124.29 | 49.39 | 65.11 | Grade 5 | 112 |
| 3.31 | 127.09 | 54.15 | 75.93 | ||
| 2.61 | 122.55 | 49.61 | 68.11 | ||
| 2.88 | 122.92 | 58.13 | 73.42 | ||
| … | … | … | … |
| Rock Classification | Drilling Parameter | Selection Range |
|---|---|---|
| Grade 2 | Impact Pressure | [α2 − β2, α2 + β2] |
| Rotary Pressure | [γ2 − δ2, γ2 + δ2] | |
| Grade 3 | Impact Pressure | [α3 − β3, α3 + β3] |
| Rotary Pressure | [γ3 − δ3, γ3 + δ3] | |
| Grade 4 | Impact Pressure | [α4 − β4, α4 + β4] |
| Rotary Pressure | [γ4 − δ4, γ4 + δ4] | |
| Grade 5 | Impact Pressure | [α5 − β5, α5 + β5] |
| Rotary Pressure | [γ5 − δ5, γ5 + δ5] |
| Rock Classification | Time Point | Statistic | Impact Pressure (Pa) | Rotary Pressure (Pa) | Sample Size |
|---|---|---|---|---|---|
| Grade 2 | Before Filtering | Mean | 145.14 | 97.32 | 76 |
| Standard Deviation | 14.28 | 7.36 | |||
| After Filtering | Mean | 144.43 | 94.95 | 64 | |
| Standard Deviation | 11.37 | 6.09 | |||
| Grade 3 | Before Filtering | Mean | 144.07 | 92.08 | 119 |
| Standard Deviation | 12.75 | 11.66 | |||
| After Filtering | Mean | 147.85 | 95.38 | 104 | |
| Standard Deviation | 6.17 | 8.44 | |||
| Grade 4 | Before Filtering | Mean | 136.44 | 75.16 | 129 |
| Standard Deviation | 8.92 | 6.50 | |||
| After Filtering | Mean | 135.90 | 75.52 | 111 | |
| Standard Deviation | 4.16 | 4.53 | |||
| Grade 5 | Before Filtering | Mean | 123.33 | 69.18 | 112 |
| Standard Deviation | 7.34 | 6.39 | |||
| After Filtering | Mean | 123.02 | 69.48 | 92 | |
| Standard Deviation | 4.61 | 4.97 |
| Rock Mass Grade | Precision | Recall | F1 Score |
|---|---|---|---|
| Grade 2 | 0.94 | 0.79 | 0.86 |
| Grade 3 | 0.83 | 0.97 | 0.90 |
| Grade 4 | 0.97 | 0.94 | 0.96 |
| Grade 5 | 0.96 | 0.93 | 0.95 |
| Average Accuracy | 0.93 | 0.91 | 0.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Yan, J.; Li, H.; Zhang, P.; Liu, Y.; Liu, L.; Ye, S.; Liu, H. Intelligent Identification of Surrounding Rock Grades Based on a Self-Developed Rock Drilling Test System. Buildings 2024, 14, 2176. https://doi.org/10.3390/buildings14072176
Liu Q, Yan J, Li H, Zhang P, Liu Y, Liu L, Ye S, Liu H. Intelligent Identification of Surrounding Rock Grades Based on a Self-Developed Rock Drilling Test System. Buildings. 2024; 14(7):2176. https://doi.org/10.3390/buildings14072176
Chicago/Turabian StyleLiu, Quanwei, Junlong Yan, Hongzhao Li, Peiyuan Zhang, Yankai Liu, Linsheng Liu, Shoujie Ye, and Haitao Liu. 2024. "Intelligent Identification of Surrounding Rock Grades Based on a Self-Developed Rock Drilling Test System" Buildings 14, no. 7: 2176. https://doi.org/10.3390/buildings14072176