
A Numerical Study of Reinforcement Structure in Shaft Construction Using Vertical Shaft Sinking Machine (VSM)
Abstract
:1. Introduction
2. The Application of VSM and Structural Design in the Case Study
2.1. Project Overview
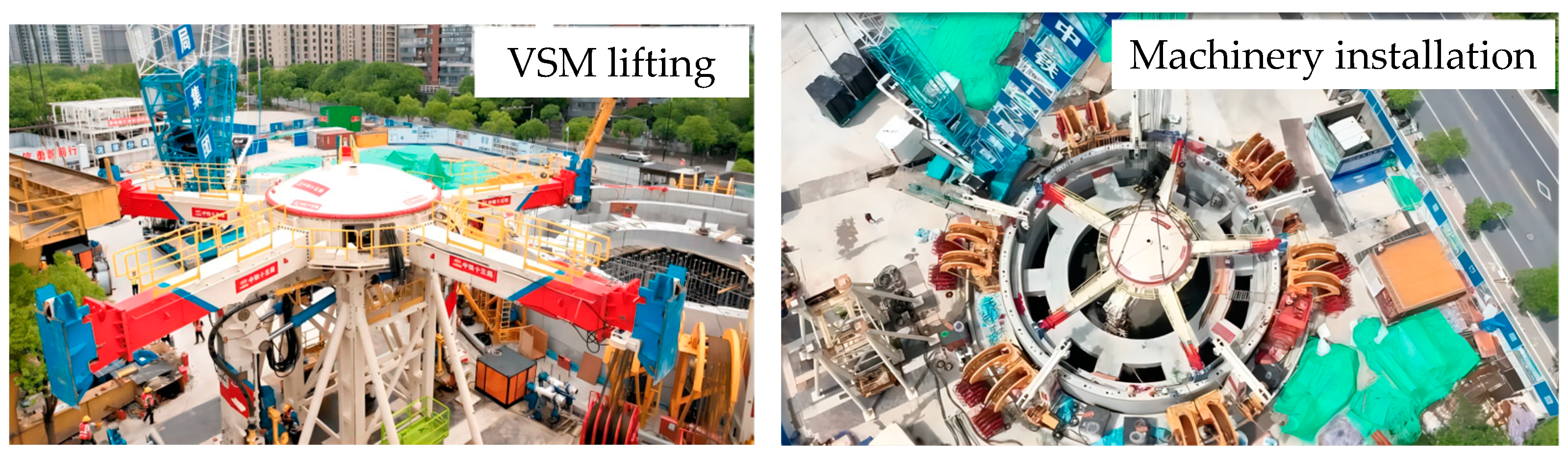
2.2. Components of VSM
2.3. Structural Design for Reinforcement
- Concrete ring foundation
- 2.
- Shaft wall and ring bottom beam
- 3.
- Piles
3. Methods
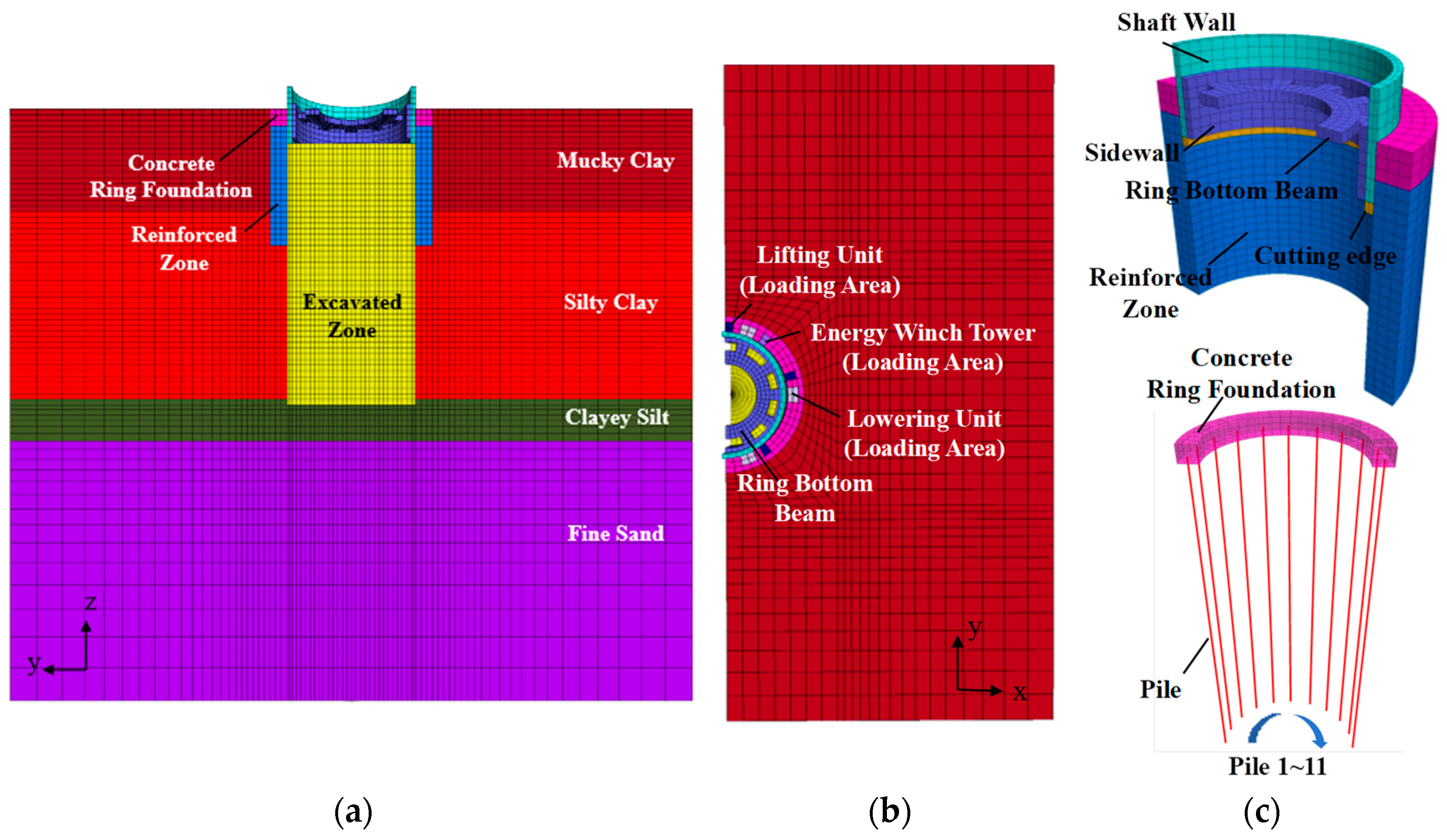
3.1. Model Development
3.2. Mesh and Boundary Conditions
3.3. Soil–Structure Interaction
3.4. Structural Parameters
- Concrete structures
- 2.
- Soils
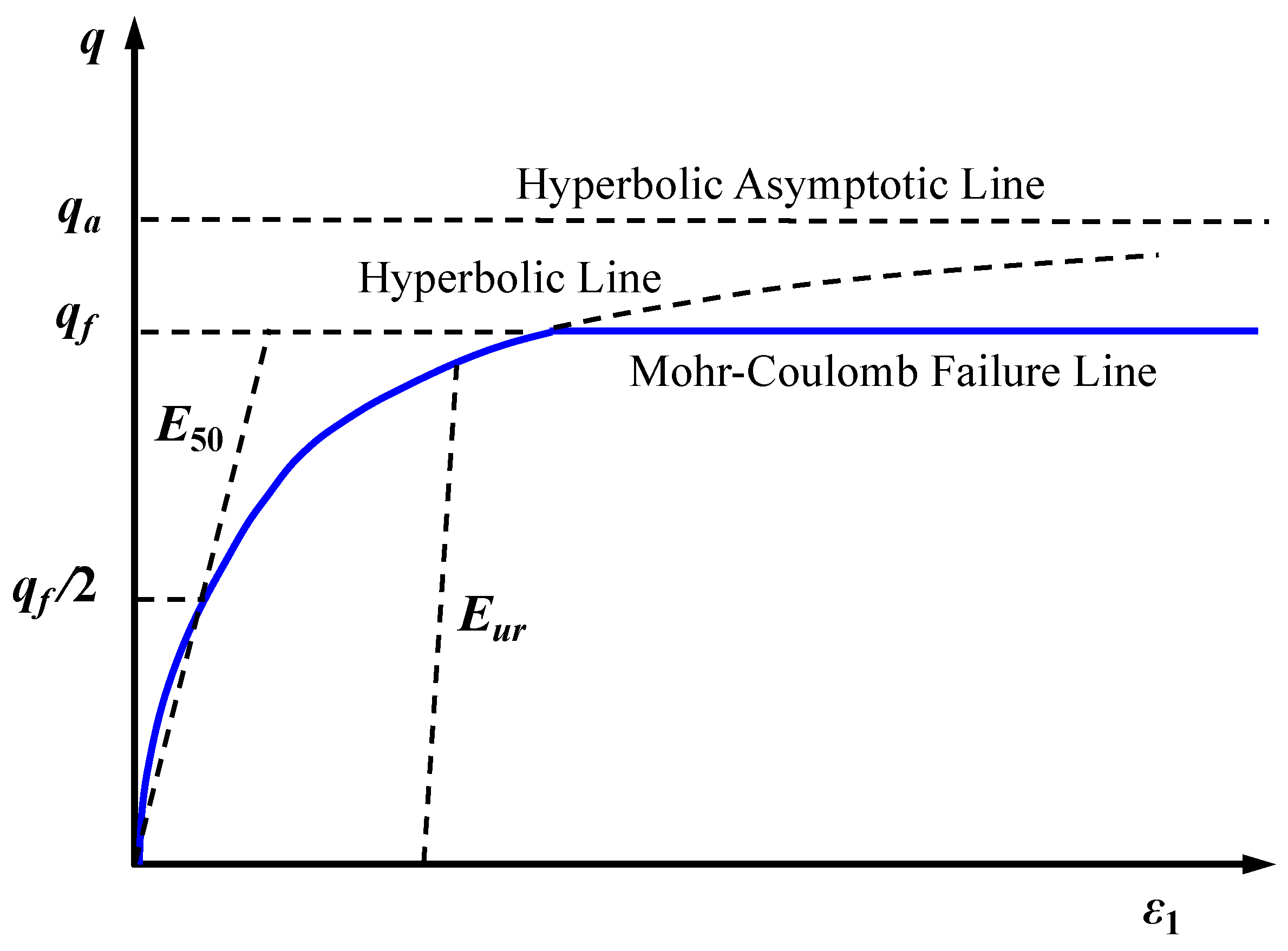
- Incremental elastic law
- Shear yield criterion
- Volumetric cap criterion
- Tensile yield criterion
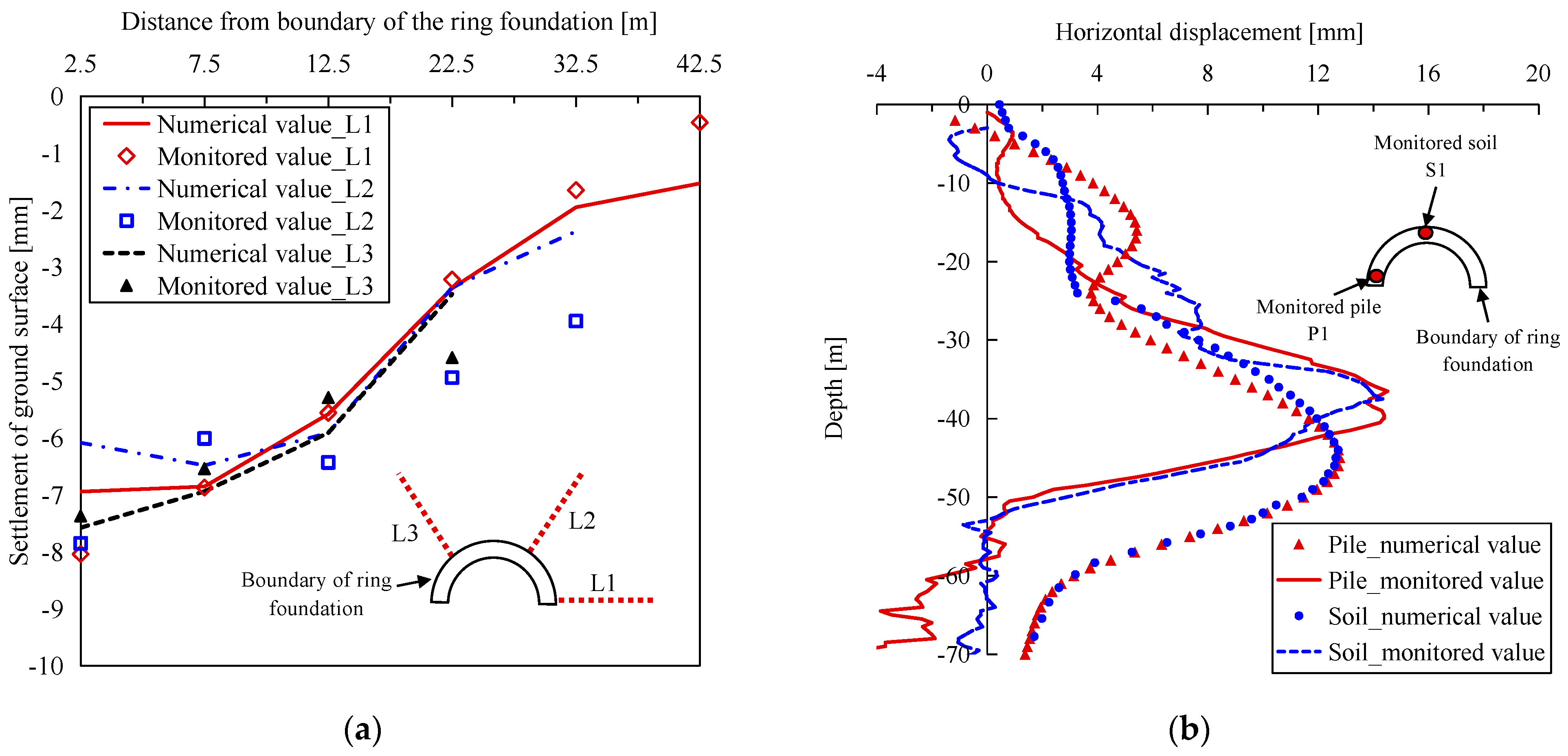
3.5. Model Validation
4. Results
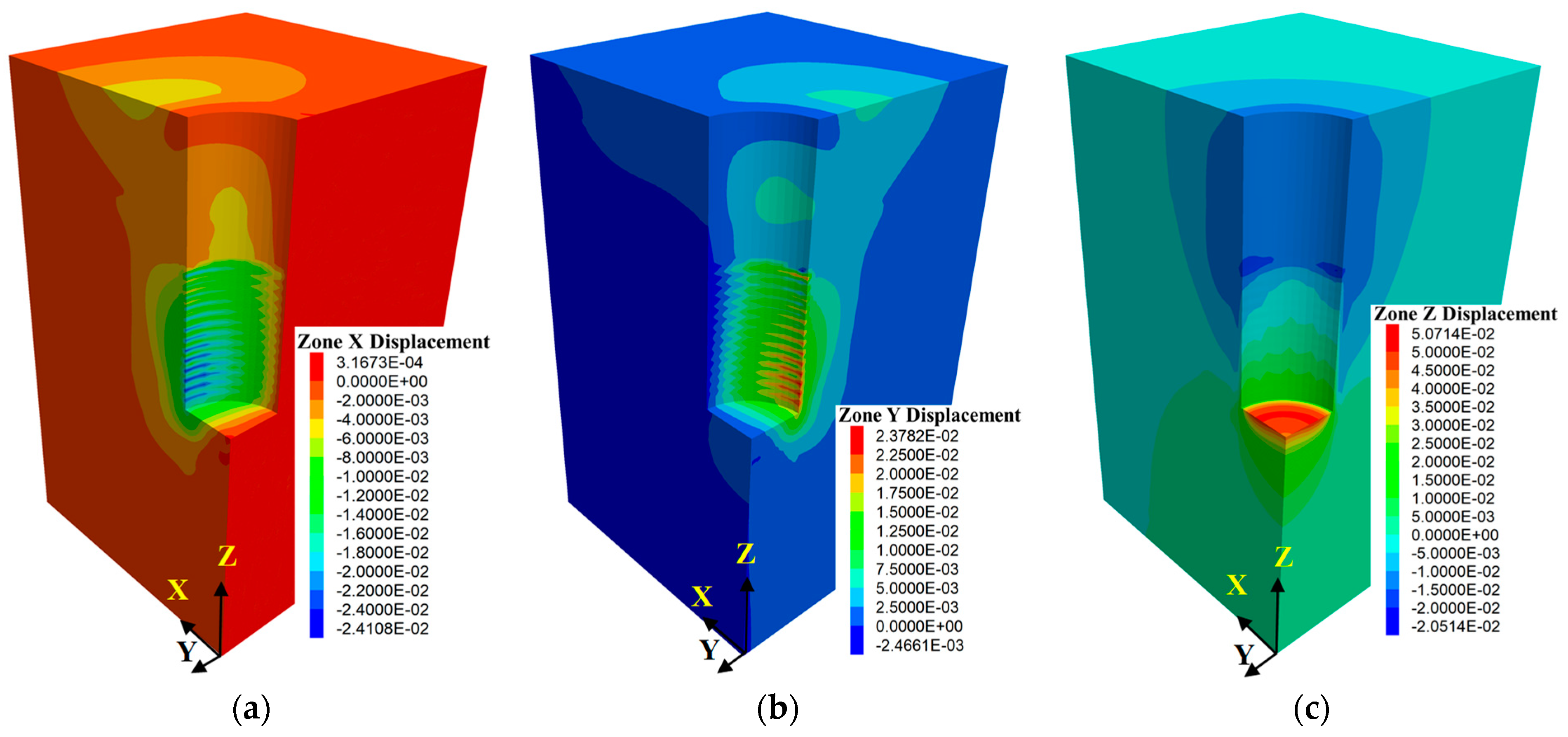
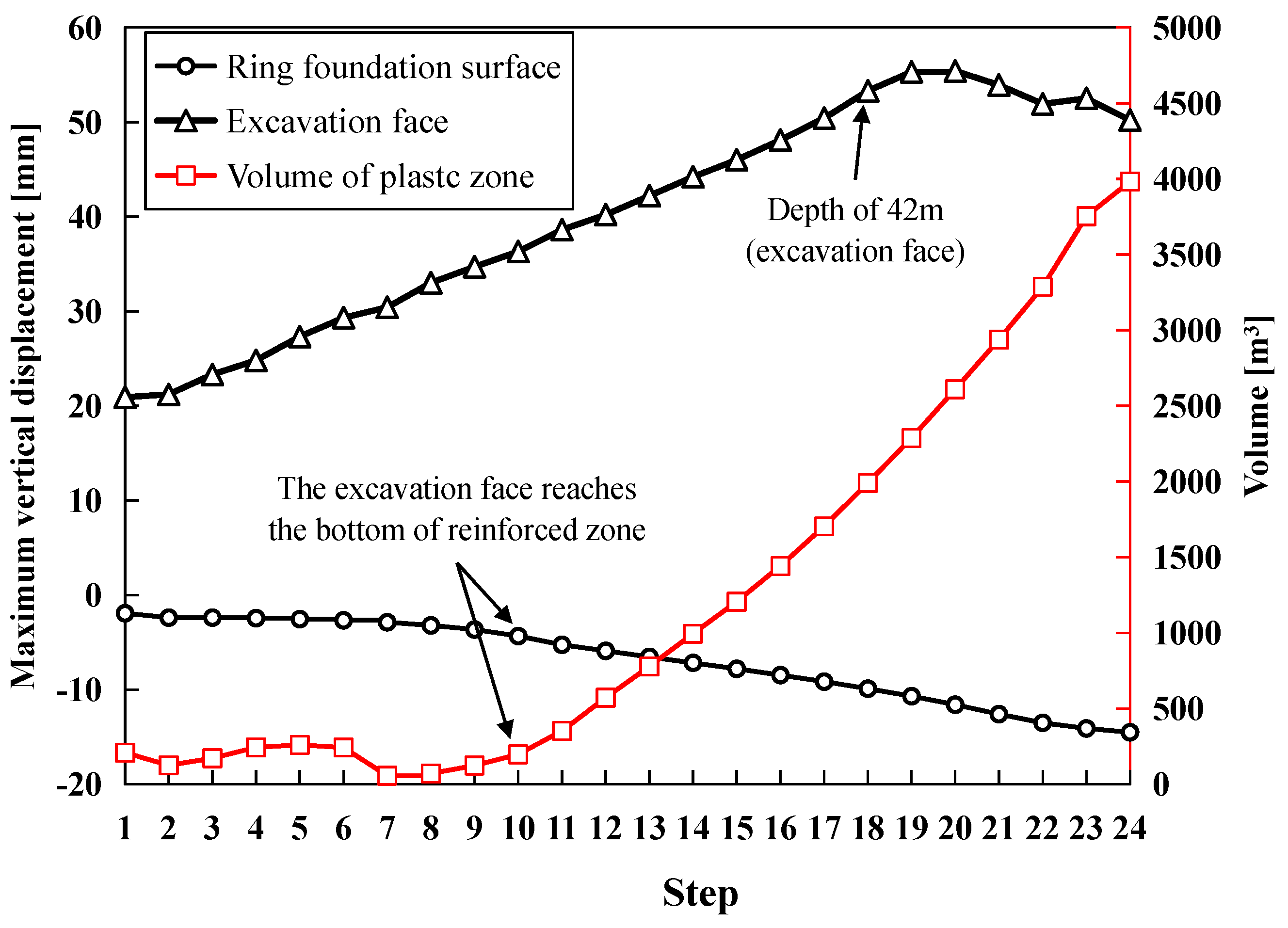
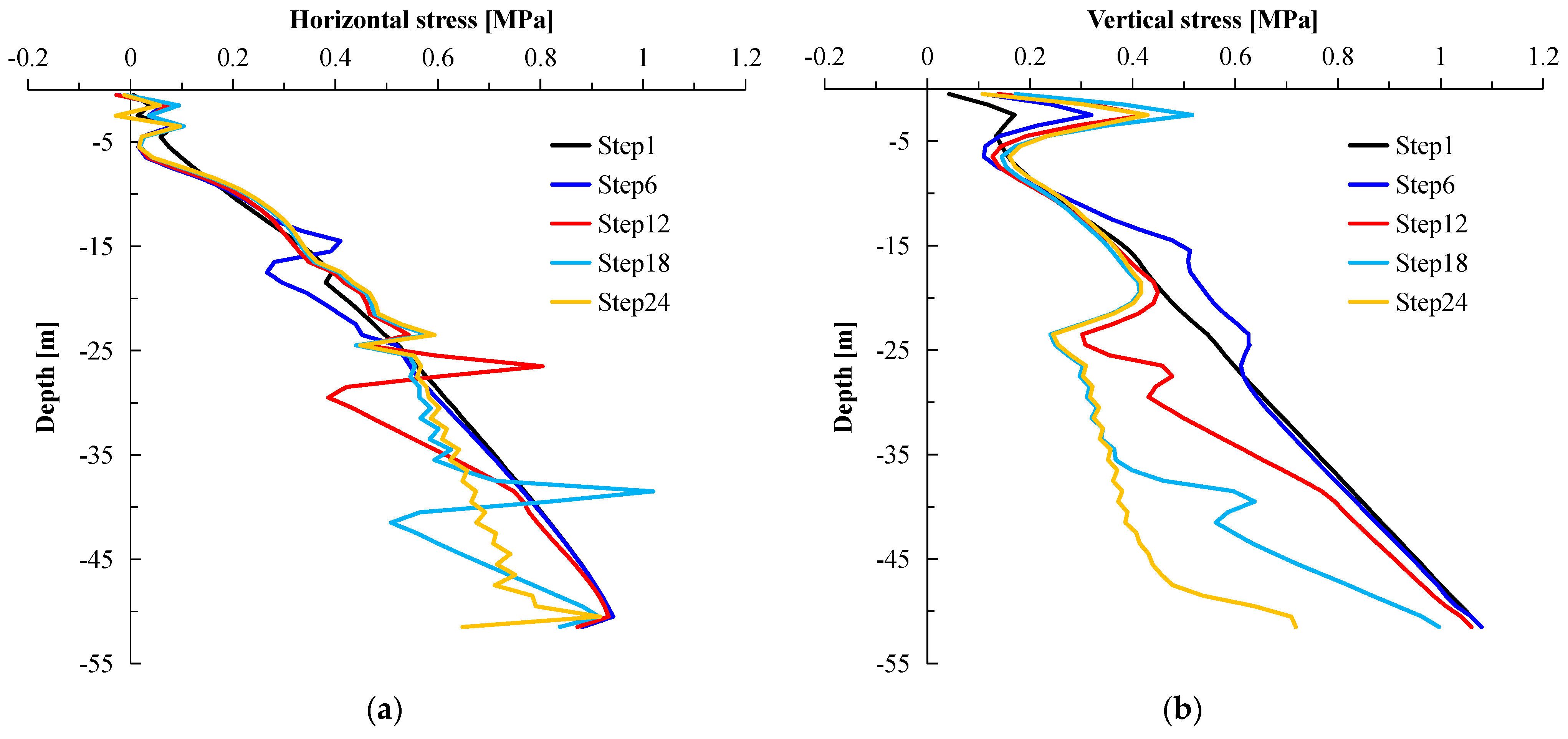
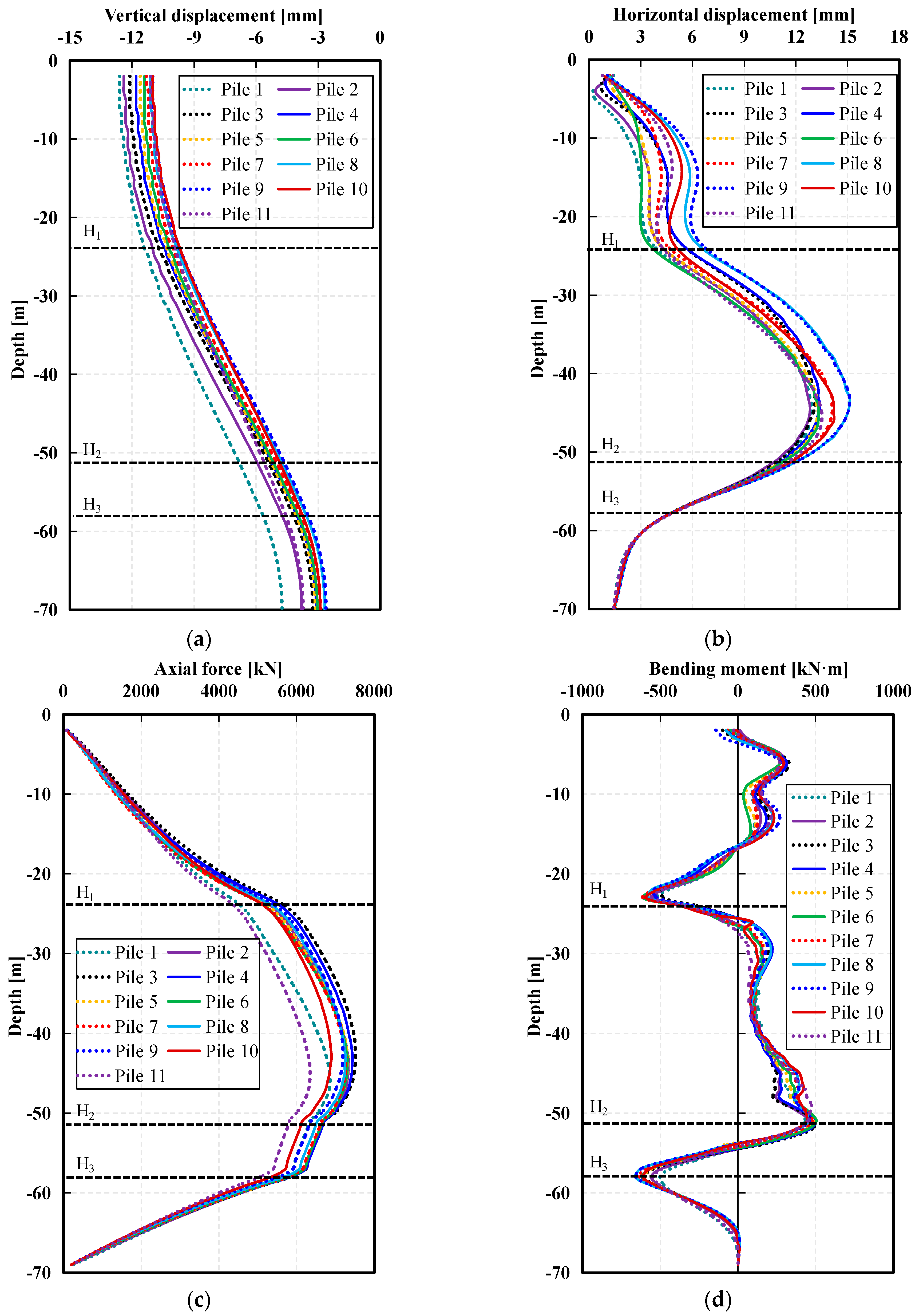
4.1. Mechanical Response in the Vicinity of the Shaft
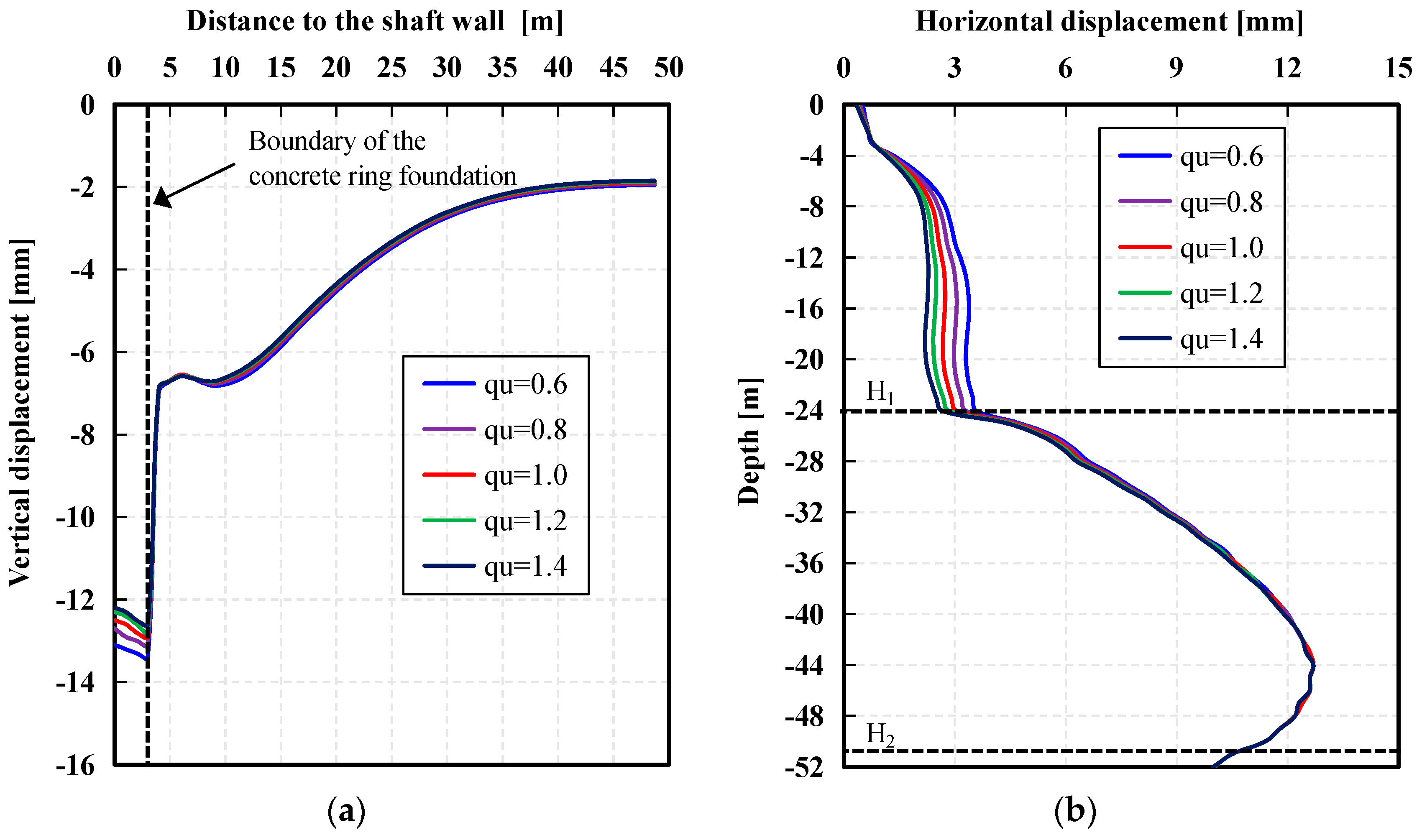
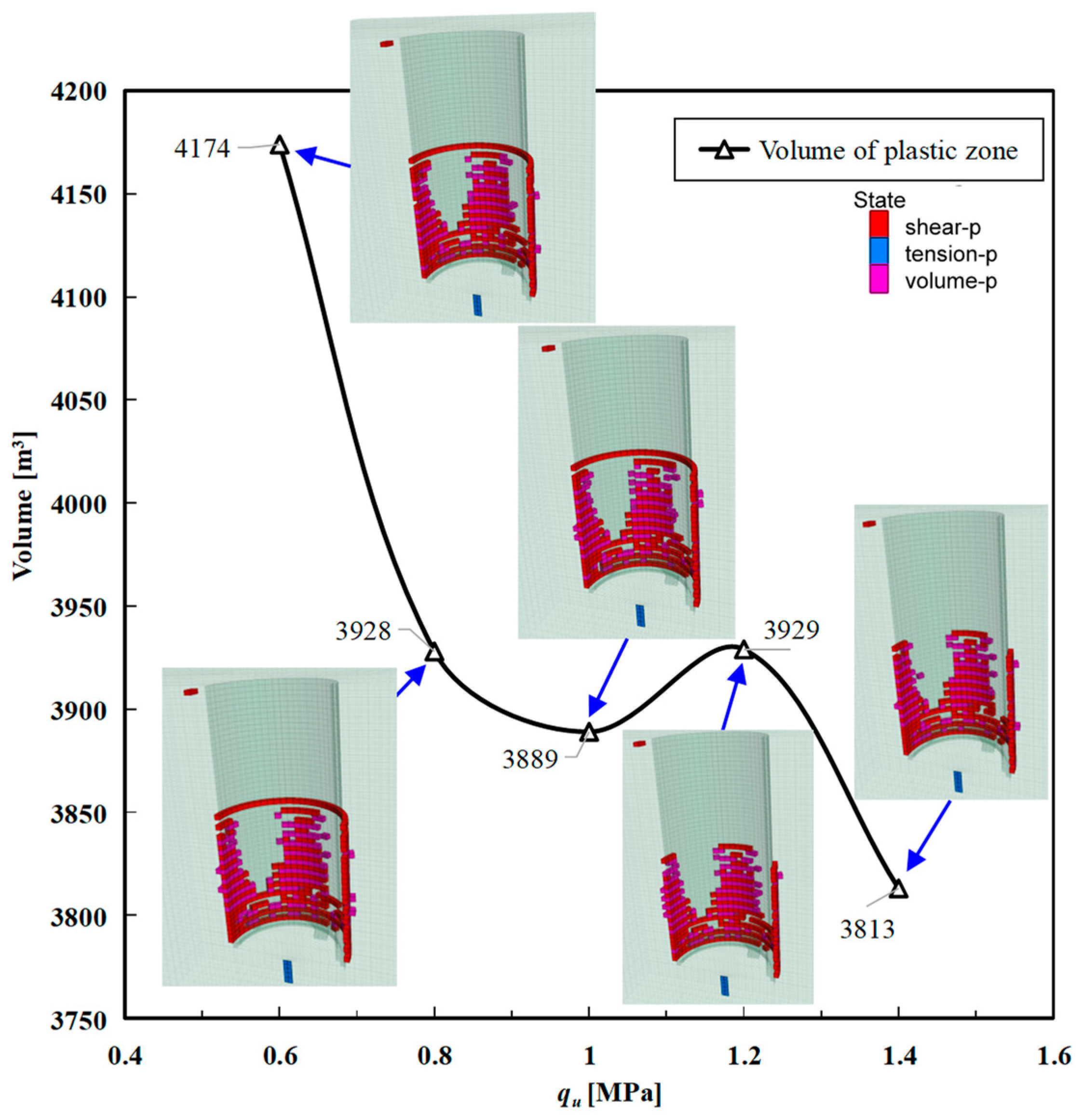
4.2. The Influence of the Reinforced Zone Strength
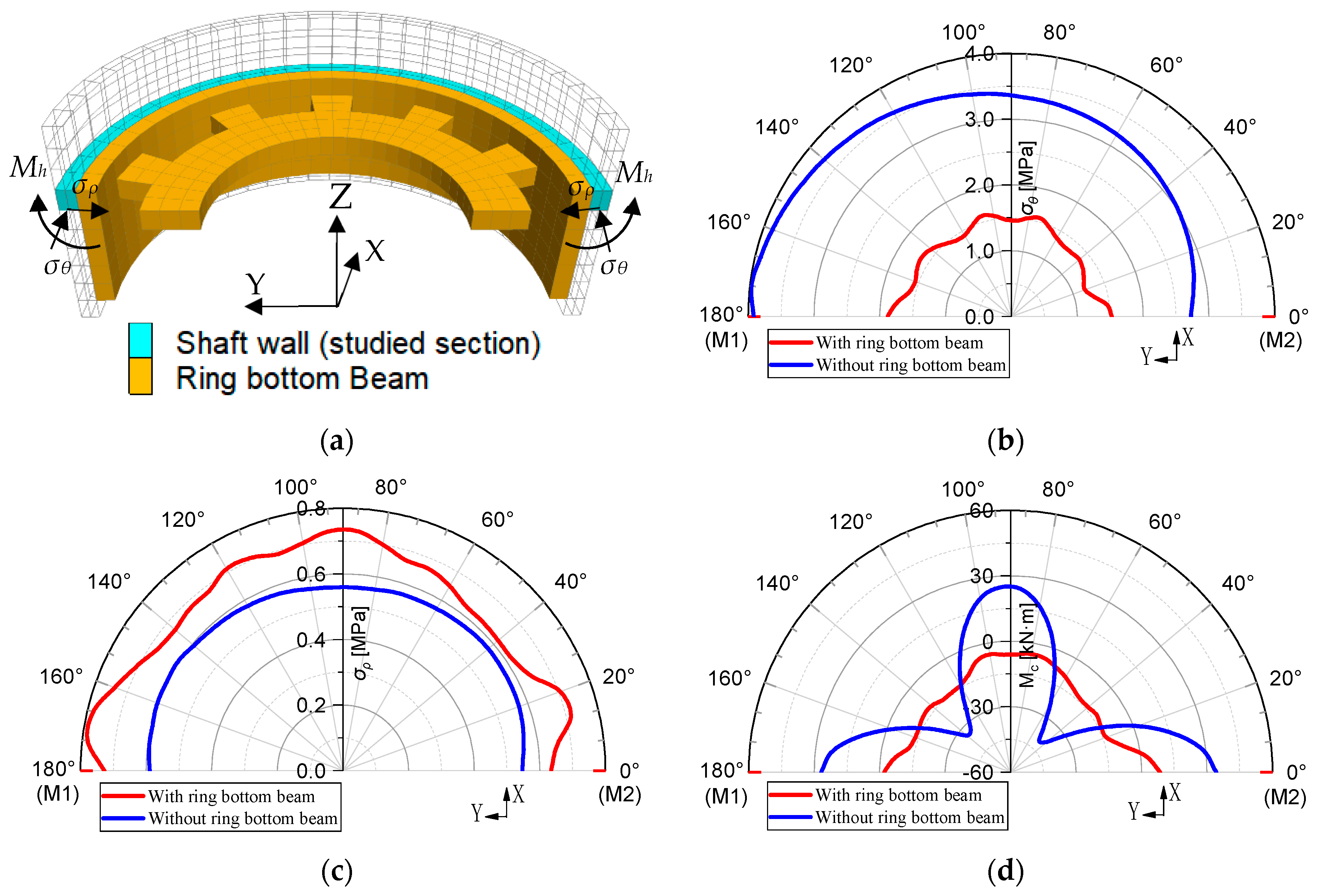
4.3. The Influence of the Ring Bottom Beam
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Luo, W.; Lin, H.; Huang, W.; Zhou, X.; Zhang, Z. Undrained Sinking Caisson Construction Technology of a 28.4 m Deep Well in Soft Soils. Spec. Struct. 2022, 39, 113–119. [Google Scholar]
- Krauze, K.; Boloz, L.; Wydro, T. Mechanized Shaft Sinking System. Arch. Min. Sci. 2018, 63, 891–902. [Google Scholar] [CrossRef]
- Neye, E.; Burger, W.; Rennkamp, P. Rapid Shaft Sinking. Min. Rep. 2013, 149, 250–255. [Google Scholar] [CrossRef]
- Abdrabbo, F.; Gaaver, K. Challenges and Uncertainties Relating to Open Caissons. J. Deep. Found. Inst. 2012, 6, 21–32. [Google Scholar] [CrossRef]
- Peng, F.; Dong, Y.; Wang, H.; Jia, J.; Li, Y. Remote-Control Technology Performance for Excavation with Pneumatic Caisson in Soft Ground. Autom. Constr. 2019, 105, 102834. [Google Scholar] [CrossRef]
- Matsumoto, T.; Gomi, N.; Ikemi, Y. Process for Improving Open Caisson, SS Caisson Process; Open Keson No Kairyo kohoSS Keson Koho. Denryoku Doboku Electr. Power Civ. Eng. 1997, 5, 100–102. [Google Scholar]
- Tanimura, D.; Ueda, J.; Tani, Y. Large-Scale Vertical Shaft Excavation Using Super-Open Caisson System. Construction of Tamasato Vertical Shaft (Ishioka Vertical Shaft No. 5); Jidoka Open Caisson Koho Ni Yoru Daikibo Tatekui No Kussaku. Tamasato Tateko (Ishioka Dai5 Tateko) Shinsetsu Koji. Kensetsu No Kikaika 1998, 9–14. [Google Scholar]
- Wang, Y.; Liu, M.; Liao, S.; Yi, Q.; He, J.; Liu, L.; Gong, Z.; Li, K. Investigation on the Stratigraphic Response and Plugging Effect Induced by Press-in Open Caisson in Mucky Soil. KSCE J. Civ. Eng. 2023, 27, 1928–1941. [Google Scholar] [CrossRef]
- Tani, Y.; Nakano, M.; Okoshi, M.; Maeda, S.; Isa, H. Research & Development of Automatic System for Open Caisson Method. In Proceedings of the 13th International Symposium on Automation and Robotics in Construction, Tokyo, Japan, 11–13 June 1996; pp. 323–332. [Google Scholar]
- Peila, D.; Viggiani, G.; Celestino, T. Tunnels and Underground Cities. Engineering and Innovation Meet Archaeology, Architecture and Art: Proceedings of the WTC 2019 ITA-AITES World Tunnel Congress (WTC 2019), 3–9 May 2019, Naples, FL, USA; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Kwong, J.; Sandefur, K.; Nishimura, J. Geotechnical Engineering Aspects of Deep Microtunneled Pipeline Crossings of Honolulu Harbor in Very Soft Sediments. In Proceedings of the Pipelines 2017: Condition Assessment, Surveying, and Geomatics, Phoenix, AZ, USA, 6–9 August 2017; ASCE Press: Reston, VA, USA, 2017; pp. 482–493. [Google Scholar]
- Frenzel, C.; Delabbio, F.; Burger, W. Shaft Boring Systems for Mechanical Excavation of Deep Shafts. In Proceedings of the Second International Symposium on Block and Sublevel Caving, Australian Centre for Geomechanics, Perth, Australia, 20–22 April 2010; pp. 289–295. [Google Scholar]
- DeMerchant, M.R.; Kierstead, R.D. Evolution of the ARC-100 Reactor Building Design; ARC Clean Technology Canada Inc.: Saint John, NB, Canada, 2023. [Google Scholar]
- Jiang, H. A Summary of Precast Technology Application in Tunneling. Proceedings of Geo Shanghai 2018 International Conference: Tunnelling and Underground Construction, Shanghai, China, 27–30 May 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 749–756. [Google Scholar]
- Huang, M.; Zhang, Z.; Xu, J.; Jiang, H.; Bao, H.; Liu, X. Measuring of Shaft Wall Stress in Caisson Construction Process Based on Vertical Shaft Sinking Machine: A Case Study of Caisson-Type Underground Intelligent Parking Garage Project in Nanjing, China. Tunn. Constr. 2022, 42, 1033–1043. [Google Scholar]
- Jiang, H.; Bao, H.; Lin, Y. Research and Application of Design and Construction Technology of Assembled Shaft: A Case Study of a Sinking Shaft Underground Parking Garage in Nanjing, China. Tunn. Constr. 2022, 42, 463–470. [Google Scholar]
- Zhou, J.; Liu, C.; Xu, J.; Zhang, Z.; Li, Z. Deformation Mechanism and Control of In-Situ Assembling Caisson Technology in Soft Soil Area under Field Measurement and Numerical Simulation. Materials 2023, 16, 1125. [Google Scholar] [CrossRef]
- Stevens, F.; Weiner, S. Deep Tunnel Sewerage Systems Singapore’s Success Story. Water Sanit. Afr. 2022, 17, 19–23. [Google Scholar]
- Fu, H.; Xu, Y.; Cheng, L. Overview of the Research Hotspots of China’s Shaft Boring Machine. Mine Constr. Technol. 2023, 44, 83–88. [Google Scholar]
- Ma, C.; Hong, H.; Wen, W.; Yu, W.; Pei, H. VSM Technology and Equipment for Shaft Sinking and Its Engineering Applications. Mine Constr. Technol. 2024, 45, 10–15. [Google Scholar]
- Xu, G.; Xiao, W.; Zhao, F.; Qi, Z.; Lyu, D.; Zhao, Z. Structural Design of a Kind of Caisson Submerged Shaft Boring Machine. Tunn. Constr. 2022, 42, 145–153. [Google Scholar]
- Schmäh, P. Vertical Shaft Machines. State of the Art and Vision. Acta Montan. Slovaca 2007, 12, 208–216. [Google Scholar]
- Schmäh, P.; Berblinger, S. VSM Shaft Sinking Technology—Mechanized Shaft Sinking with the VSM in Different Projects for Subway Ventilation Shafts. In Proceedings of the World Tunnelling Congress, Foz do Iguaçu, Brazil, 9–15 May 2014. [Google Scholar]
- Rahimi, M.; Rajmohan, A.; Spasojevic, A.; Scheele, J.; Cabot, E.; Ho, K.-S.; Ball, S. Geotechnical Considerations of Deep Mine Shaft, Sinking by Combined VSM and Drill & Blast Construction Methodology. In Proceedings of the GeoCalgary 2022: The 75th Annual Canadian Geotechnical Society Conference, Calgary, AB, Canada, 2–5 October 2022. [Google Scholar]
- Royston, R.; Sheil, B.B.; Byrne, B.W. Monitoring the Construction of a Large-Diameter Caisson in Sand. Proc. Inst. Civ. Eng. Geotech. Eng. 2022, 175, 323–339. [Google Scholar] [CrossRef]
- Templeman, J.O.; Phillips, B.M.; Sheil, B.B. Cutting Shoe Design for Open Caissons in Sand: Influence on Vertical Bearing Capacity. Proc. Inst. Civ. Eng. Geotech. Eng. 2023, 176, 58–73. [Google Scholar] [CrossRef]
- Guo, M.; Dong, X.; Li, J. Study on the Earth Pressure during Sinking Stage of Super Large Caisson Foundation. Appl. Sci. 2021, 11, 10488. [Google Scholar] [CrossRef]
- Chu, J.; Ma, J.; Jiang, B.; Li, M.; Zhang, K. Experimental Study on Side Friction Distribution of Caissons during Sinking in Water. Chin. J. Geotech. Eng. 2019, 41, 707–716. [Google Scholar]
- Yan, F.; Shi, G. Analysis of Limiting Soil Resistance beneath Cuttingcurb during Sinking Ofopen Caisson. Rock. Soil. Mech. 2013, 34 (add 1), 80–87. [Google Scholar]
- Royston, R.; Sheil, B.B.; Byrne, B.W. Undrained Bearing Capacity of the Cutting Face for an Open Caisson. Géotechnique 2022, 72, 632–641. [Google Scholar] [CrossRef]
- Chavda, J.T.; Mishra, S.; Dodagoudar, G.R. Experimental Evaluation of Ultimate Bearing Capacity of the Cutting Edge of an Open Caisson. Int. J. Phys. Model. Geotech. 2020, 20, 281–294. [Google Scholar] [CrossRef]
- Mu, B.; Bie, Q.; Zhao, X.; Gong, W. Meso-Experiment on Caisson Load Distribution Characteristics During Sinking. China J. Highw. Transp. 2014, 27, 49–56. [Google Scholar]
- Gaudio, D.; Madabhushi, S.G.; Rampello, S.; Viggiani, G.M. Experimental Investigation of the Seismic Performance of Caisson Foundations Supporting Bridge Piers. Géotechnique 2022, 74, 892–906. [Google Scholar] [CrossRef]
- Wang, W.; Wang, H.; Xu, Z. Experimental Study of Parameters of Hardening Soil Model for Numerical Analysis of Excavations of Foundation Pits. Rock. Soil. Mech. 2012, 33, 2283–2290. [Google Scholar]
- Yang, L.; Zhou, L. Experimental Study of Parameters of HS Model for Numerical Analysis of Foundation Pits in Ningbo Soft Soil Area. Tunn. Constr. 2018, 38, 954–962. [Google Scholar]
- Itasca Consulting Group, Inc. Fast Language Analysis of Continua in 3 Dimensions, Version 6.0, User’s Mannual; Itasca Consulting Group, Inc.: Minneapolis, MN, USA, 2017. [Google Scholar]
- Brinkgreve, R.B. Selection of Soil Models and Parameters for Geotechnical Engineering Application. In Soil Constitutive Models: Evaluation, Selection, and Calibration, Proceedings of the GeoFrontiers 2005, Austin, Texas, 24–26 January 2005; American Society of Civil Engineers: Reston, VA, USA, 2005; pp. 69–98. [Google Scholar]
- Schanz, T.; Vermeer, P.; Bonnier, P.G. The Hardening Soil Model: Formulation and Verification. In Beyond 2000 in Computational Geotechnics, 1st ed.; Routledge: London, UK, 1999; pp. 281–296. [Google Scholar]
- Ma, J.; Wang, Y.; Li, H.; Wang, G. Study on the relations of cement-Soil parameters with compressive strength. Build. Sci. 2009, 25, 65–67. [Google Scholar]
- Li, J.; Liang, R. Research on compression strength and modulus ofdeformation of cemented soil. Rock. Soil. Mech. 2009, 30, 473–477. [Google Scholar]
- Liang, Z.; Li, Z.; Liu, J.; Weng, X.; Li, W. Strength analysis and experimental research on soil-cement mixed pile made by triaxial stirring machine. Chin. Joumal Undergr. Space Eng. 2009, 5, 1562–1566. [Google Scholar]
- Li, J.; Wang, S. Indoor experimentation and analysis of soil-and-cement tensile strength. J. Hebei Inst. Archit. Sci. Technol. 1998, 15, 35–38. [Google Scholar]
- Sun, Y.; Shi, D. Test study to determine the tensile strength of cement-Soil. Struct. Eng. 2003, 6, 70–73. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Diameter/(m) | Depth/(m) | Geological Condition | Functionality |
|---|---|---|---|---|
| Neapel, Italy | 4.5 | 50 | Clay, silt, sand, gravel | ventilation |
| Girona, Spain | 6–10 | 20 | Loamy coarse-grained clay, sandy clay, marl, driftstone | metro |
| Dortmund, Germany | 9 | 23 | Sand, silt, marl | tube jacking tunnel launch |
| St. Petersburg, Russia | 8.4 | 85 | Clay, sand, driftstone | sewerage |
| Moscow, Russia | 6.4 | 30–73 | Sand, lime, clay | ventilation |
| Seattle, USA | 9.8 | 45 | Clay, silt, sand, gravel | shield tunnel launch |
| Hawaii, USA | 10.8 | 36.2 | Coral, basalt | harbor |
| Kuwaiti | 8.8 | 15–27 | Sand, colluvium, clayey sandy soil, limestone | tube jacking tunnel launch |
| Jeddah, Saudi | 11 | 45 | Soft soil, clayey sandy soil, sand, gravel | sewerage |
| Singapore | 11.2 | 57 | Limestone, sandstone, mudstone | sewerage |
| Nanjing, China | 12.8 | 65 | Clay, silt, sandstone | underground parking |
| Shanghai, China (Case study) | 22.6 | 50.5 | Mucky clay, silty clay, medium silty sand | underground parking |
| Load Type | General Method | SS | Press-in | SOCS | CJM | VSM | |
|---|---|---|---|---|---|---|---|
| Lateral load | Sinking process: | Lateral earth and water pressure | Lateral earth and water pressure, lateral gravel pressure | Lateral earth and water pressure | Lateral earth and water pressure, internal water pressure | Lateral earth and water pressure, slurry pressure, equipment load | Lateral earth and water pressure, slurry pressure, internal water pressure, strut shoe load |
| drained condition: | Lateral earth and water pressure | ||||||
| Sinking resistance | Lateral friction, cutting edge resistance, buoyancy | Rolling friction resistance of gravel, cutting edge resistance, buoyancy | Lateral friction, cutting edge resistance, buoyancy | Lateral friction, cutting edge resistance, suspension force | Lateral friction, cutting edge resistance, buoyancy, suspension force | ||
| Sinking load | Self-weight | Self-weight (+press-in force) | Self-weight | Self-weight (+press-in force) | |||
| Vertical load after completion | Buoyancy, self-weight, lateral friction, uplift pile resistance (if any) | ||||||
| Structure | Shaft Wall | Ring Foundation | Reinforced Zone | Ring Support Beam | Plain Concrete |
|---|---|---|---|---|---|
| Bulk modulus, K/[MPa] | 1.92 × 104 | 1.8 × 104 | 314 | 1.8 × 104 | 1.75 × 104 |
| Shear modulus, G/[MPa] | 1.44 × 104 | 1.35 × 104 | 235 | 1.35 × 104 | 1.3 × 104 |
| Cohesion, c/[kPa] | - | - | 177 | - | - |
| Friction angle, φ/[°] | - | - | 28 | - | - |
| Density, ρ/[kg/m3] | 2500 | 2500 | 1900 | 2500 | 2350 |
| Soils | Mucky Clay | Silty Clay | Clayey Silt | Fine Sand |
|---|---|---|---|---|
| Reference stress, pref/[kPa] | 100 | 100 | 100 | 100 |
| Poisson’s ratio, ν/[MPa] | 0.3 | 0.3 | 0.3 | 0.25 |
| Cohesion, c/[kPa] | 8 | 24 | 11.8 | 4 |
| Friction angle, φ/[°] | 11 | 21 | 28 | 34 |
| Dilatancy angle, Ψ/[°] | 0 | 0 | 0 | 4 |
| Secant Young’s modulus at reference stress, /[MPa] | 8.3 | 18.9 | 13.8 | 41.1 |
| Unloading-reloading secant Young’s modulus at reference stress, /[MPa] | 37.8 | 132 | 97.5 | 164.4 |
| /[MPa] | 18.4 | 22.5 | 16.8 | 41.1 |
| Exponent in the power law, m | 0.95 | 0.9 | 0.7 | 0.5 |
| Normal consolidation coefficient, Knc | 0.81 | 0.64 | 0.53 | 0.44 |
| Failure ratio, Rf | 0.9 | 0.9 | 0.9 | 0.9 |
| Qu [Mpa] | E [Mpa] | c [kPa] | φ [°] | σt [kPa] |
|---|---|---|---|---|
| 0.6 | 426 | 131 | 27 | 110 |
| 0.8 | 565 | 177 | 28 | 137 |
| 1.0 | 710 | 204 | 27 | 162 |
| 1.2 | 852 | 285 | 28 | 185 |
| 1.4 | 994 | 290 | 34 | 208 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.; Hong, H.; Yu, L.; Liu, K.; Huang, J. A Numerical Study of Reinforcement Structure in Shaft Construction Using Vertical Shaft Sinking Machine (VSM). Buildings 2024, 14, 2402. https://doi.org/10.3390/buildings14082402
Ma C, Hong H, Yu L, Liu K, Huang J. A Numerical Study of Reinforcement Structure in Shaft Construction Using Vertical Shaft Sinking Machine (VSM). Buildings. 2024; 14(8):2402. https://doi.org/10.3390/buildings14082402
Chicago/Turabian StyleMa, Chunjing, Haijian Hong, Long Yu, Keqi Liu, and Jiadong Huang. 2024. "A Numerical Study of Reinforcement Structure in Shaft Construction Using Vertical Shaft Sinking Machine (VSM)" Buildings 14, no. 8: 2402. https://doi.org/10.3390/buildings14082402