
A Real-Time Inverted Velocity Model for Fault Detection in Deep-Buried Hard Rock Tunnels Based on a Microseismic Monitoring System
 ,
,
Abstract
:1. Introduction
2. Methodology
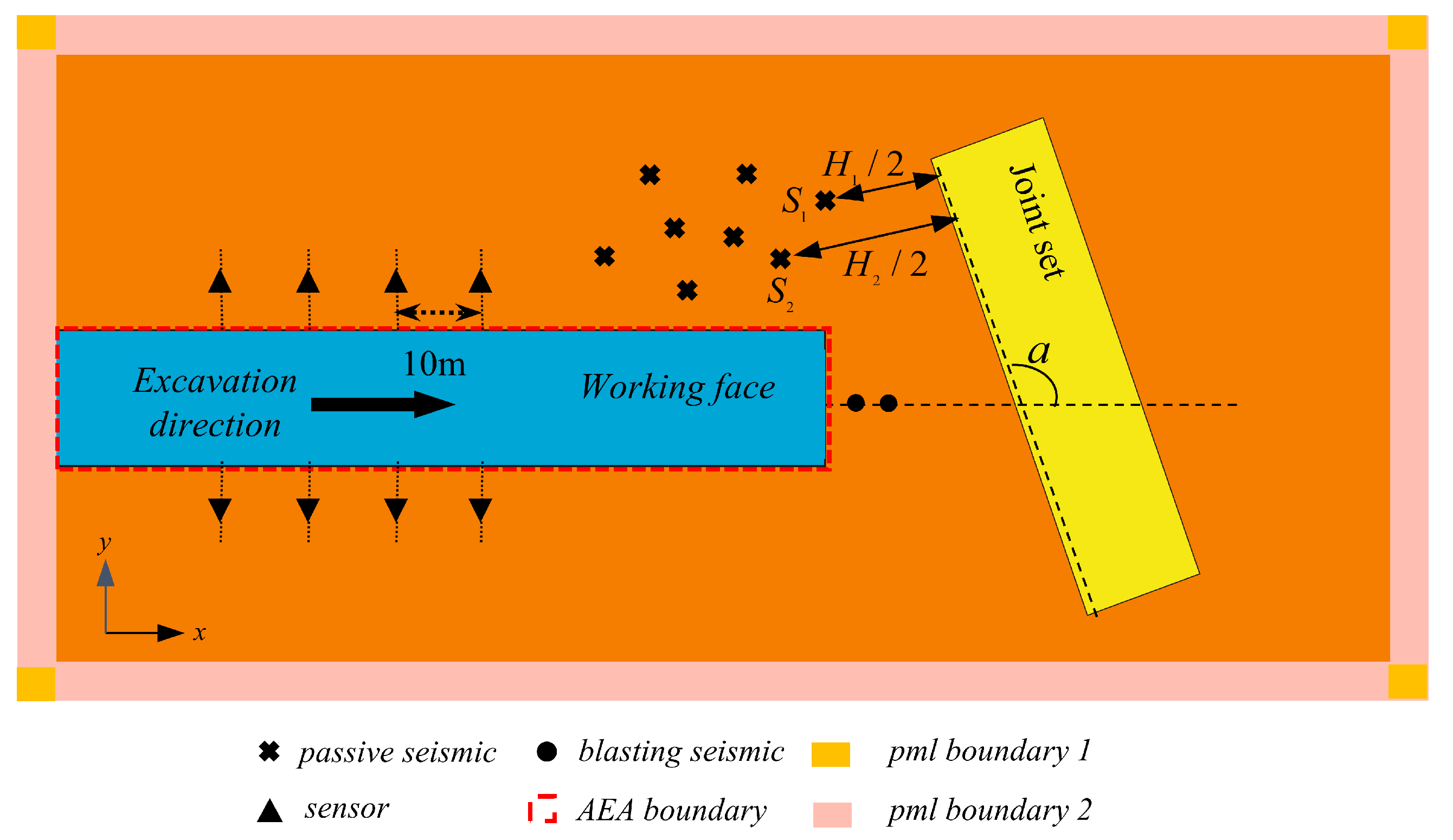
2.1. Real-Time Observation System
2.2. Inversion of the RMS Velocity Field Based on Microseismic Sources
2.2.1. Time–Distance Curve Equation in Cases of Nonlinear Seismic Sources
- t represents the first reflected wave travel time;
- v0 represents the RMS velocity value in a homogeneous medium;
- Xi is the horizontal distance between the seismic source and the sensor;
- t0 is self-excitation and self-collection time;
- h is the depth of the corresponding layer.

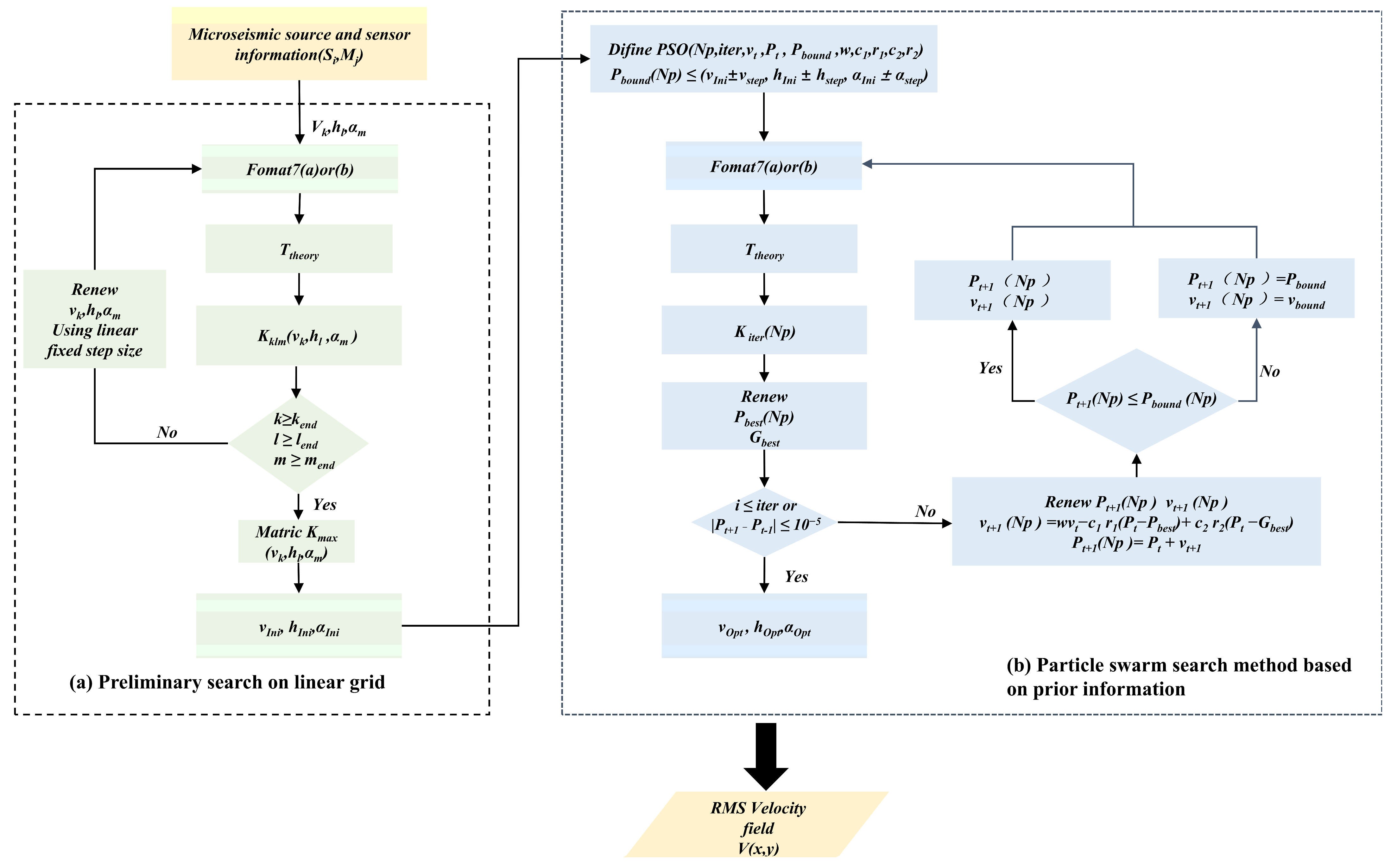
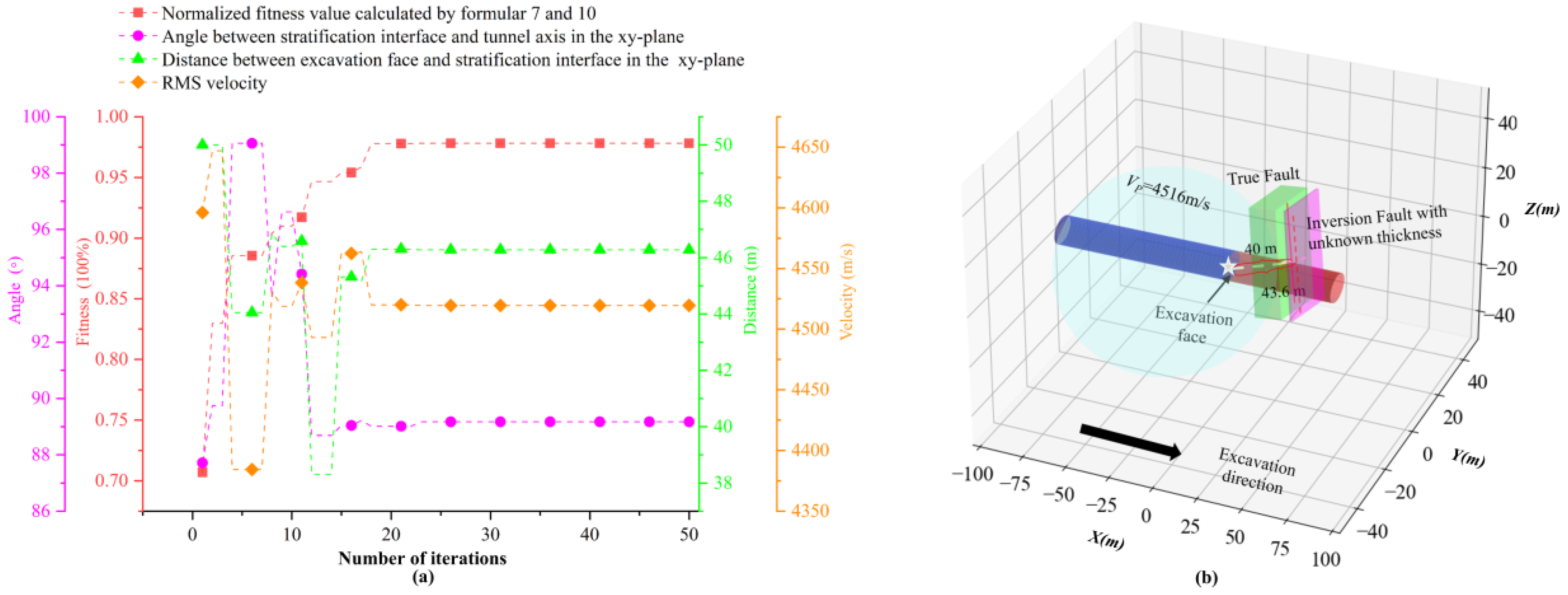
2.2.2. PSO Nonlinear Search Method for Establishing the RMS Velocity Field
- Step 1—Select signals with high signal-to-noise ratios from the nonlinear seismic source parameters (xi, yi, t0i) computed in Section 2.1 based on the MS. These signals are reassembled into profiles to serve as the inputs for inversion;
- Step 2—Implement a linear search strategy with specifically set intervals (vstep, hstep, αstep) for the grid search, taking into account the findings from prior geological surveys during the initial phase of the inversion process;
- Step 3—Using the nonlinear seismic source parameters and sensor coordinates from Step 1, calculate the theoretical arrival times Ttheory of reflected waves based on Equation (7) under the designated parameters (vt, hl, αm);
- Step 4—Window the signals based on the theoretical arrival times Ttheory using a Hamming window to obtain the windowed data Swindow;
- Step 5—Using the proposed correlation function K from Equation (10), calculate the comprehensive evaluation index and generate the correlation matrix K (vt, hl, αm);
- Step 6—From Step 5, choose the parameters corresponding to the maximum value Corr(K) in the correlation matrix as the starting input values for the PSO algorithm. Define the particle search range and initialize the particle parameters, which include the number of particles Np, current flight speed vt, position Pt, position Pboundary, individual best values Pbest, group best values gbest, and some common control parameters for PSO algorithms (w, c1, r1, c2, r2);
- Step 7—Repeat Steps 3–5, update the parameters, and end the loop when conditions are met. Output the current optimal values and corresponding parameters, which will be used to establish the initial RMS velocity field model (vopt, hopt, αopt).
2.3. Adjoint-State Full-Waveform Inversion Based on the RMS Velocity Model and Blasting Seismic Sources
3. Numerical Validation
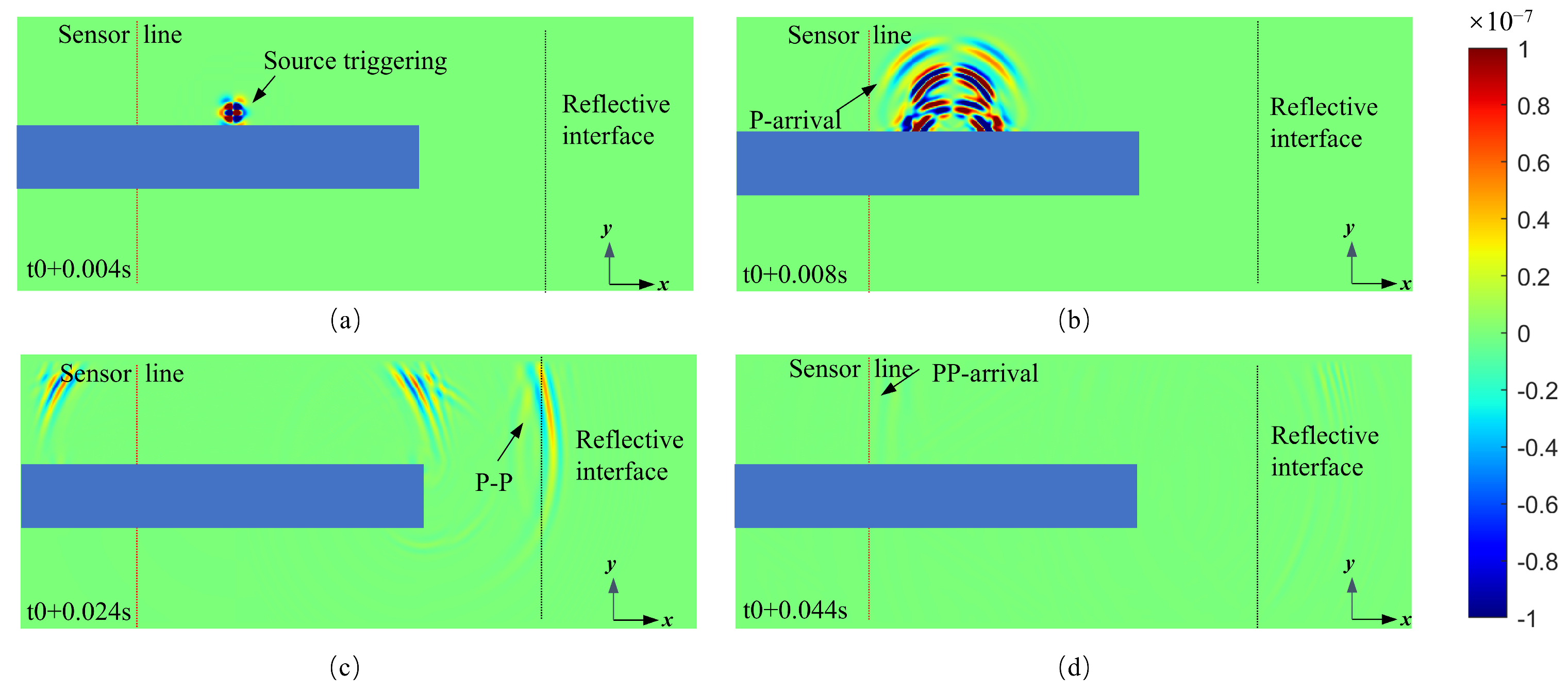
3.1. Numerical Modeling and MS Simulation
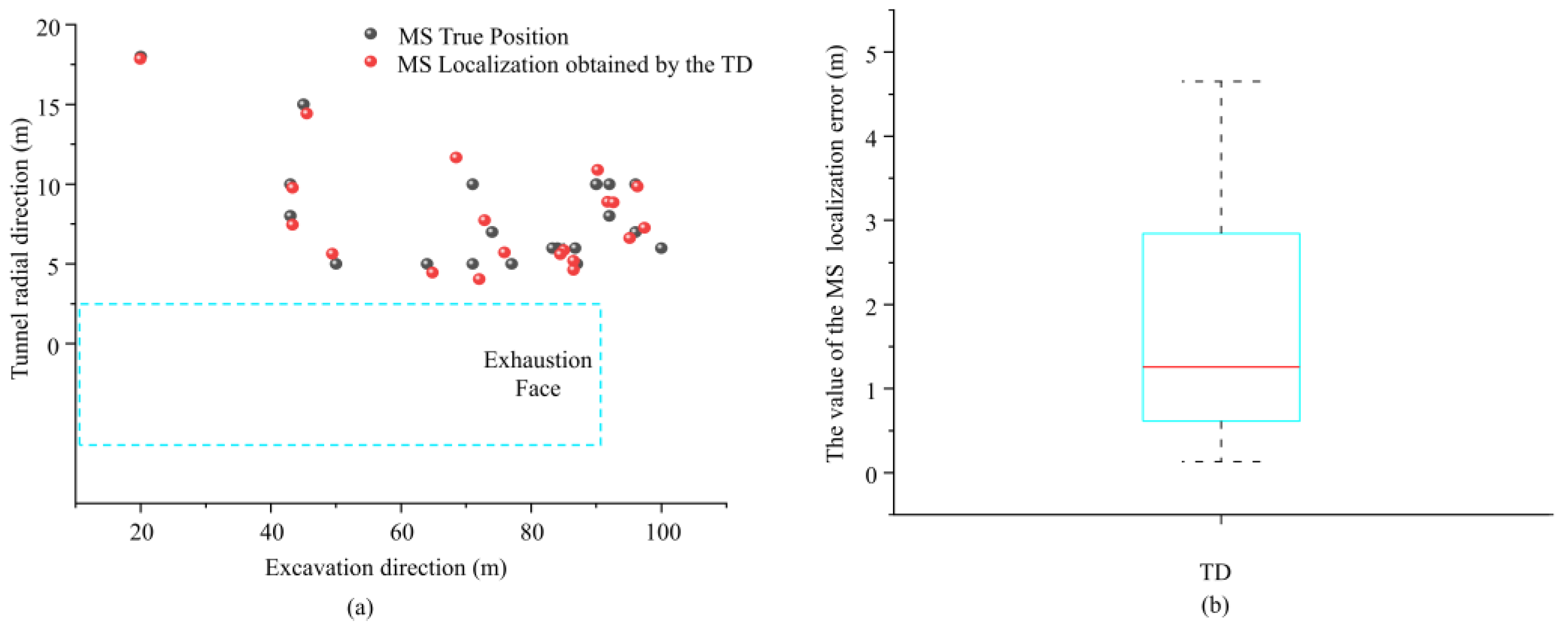
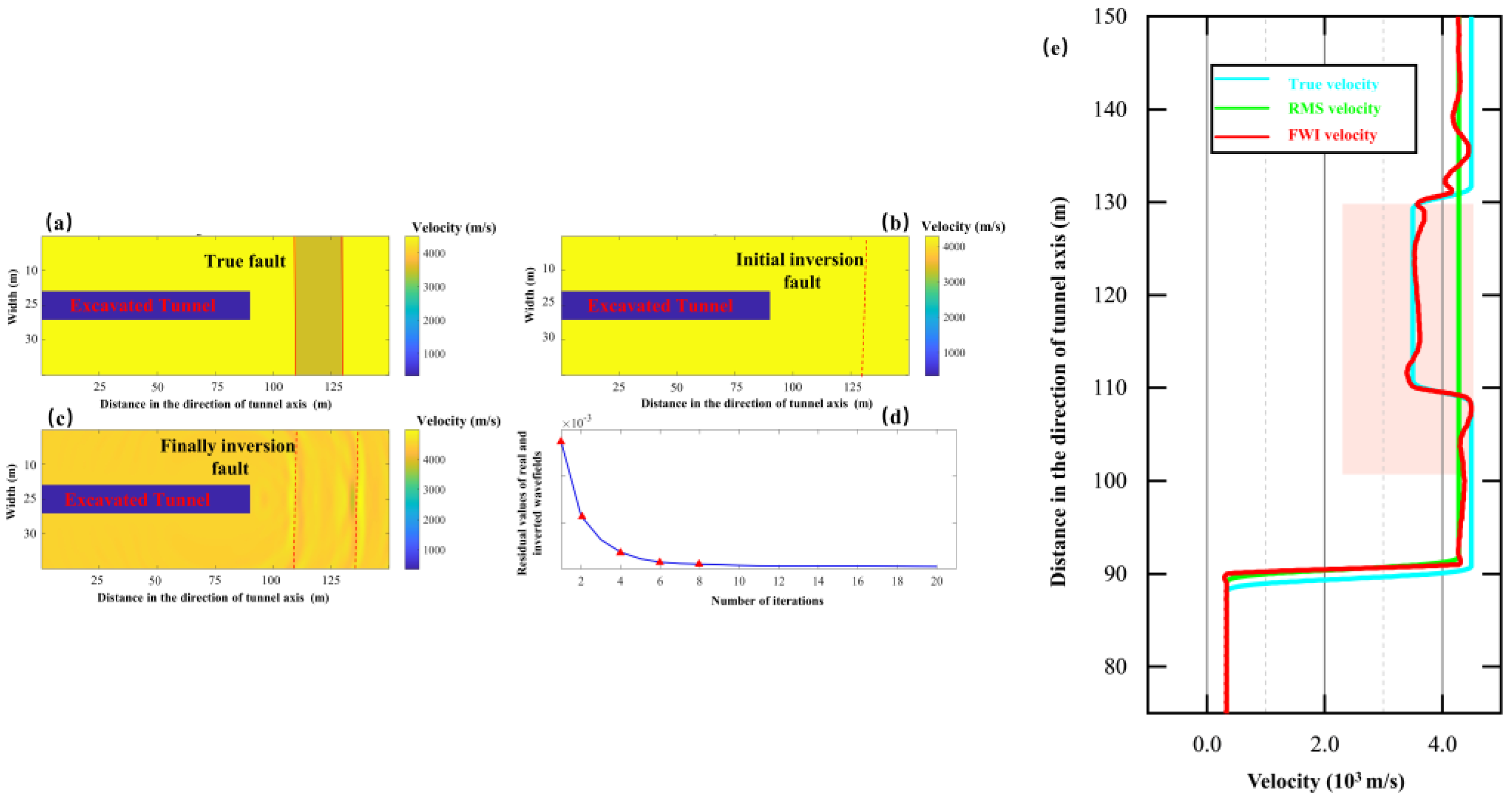
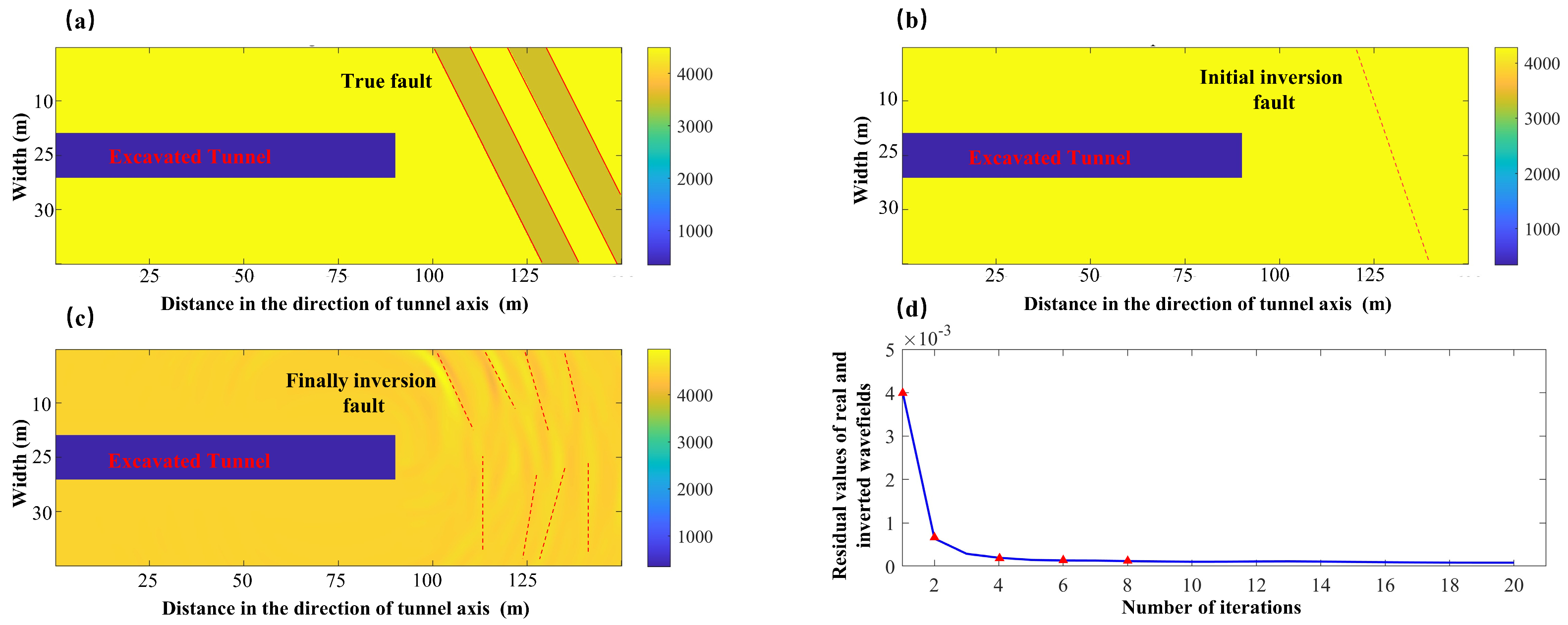
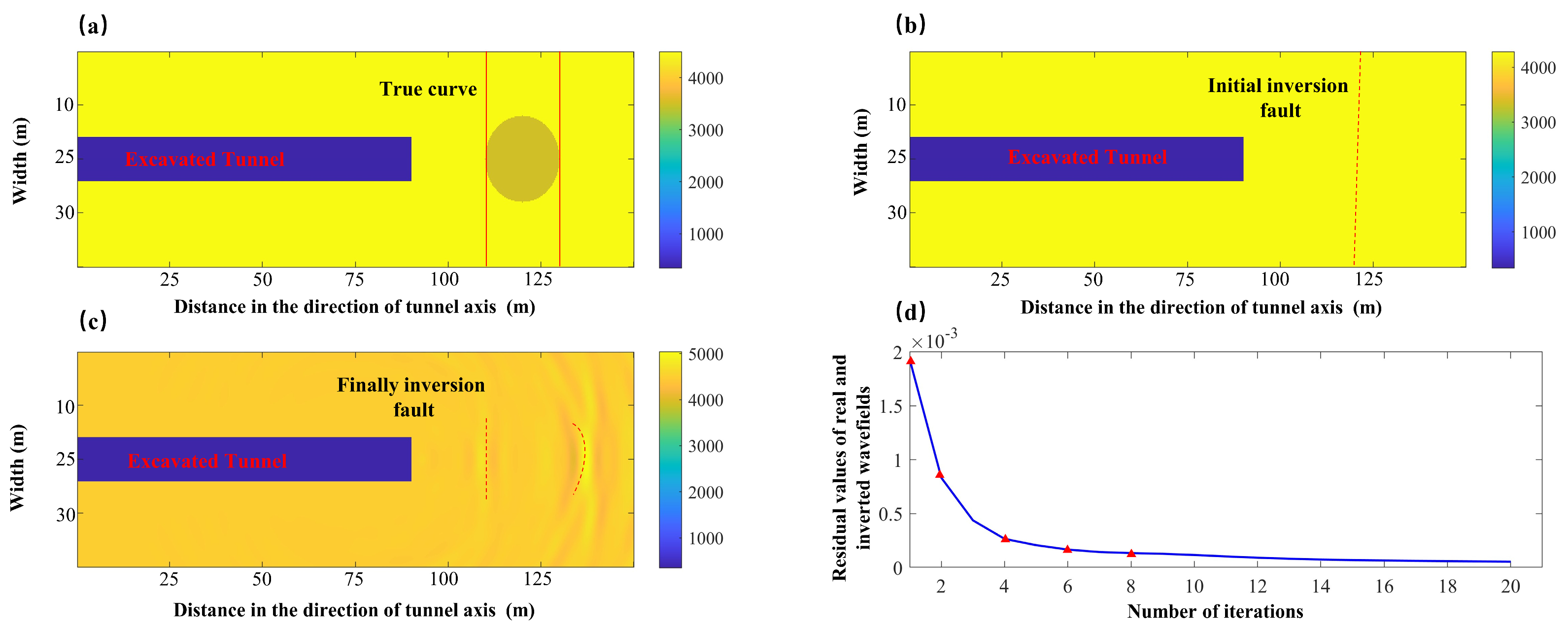
3.2. Validation and Performance Analysis of Inversion Methods
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cai, M.; Kaiser, P.K.; Martin, C.D. Quantification of Rock Mass Damage in Underground Excavations from Microseismic Event Monitoring. Int. J. Rock Mech. Min. Sci. 2001, 38, 1135–1145. [Google Scholar] [CrossRef]
- Dai, F.; Li, B.; Xu, N.; Meng, G.; Wu, J.; Fan, Y. Microseismic Monitoring of the Left Bank Slope at the Baihetan Hydropower Station, China. Rock Mech. Rock Eng. 2017, 50, 225–232. [Google Scholar] [CrossRef]
- Jiang, Q.; Yang, B.; Yan, F.; Xu, D.; Feng, G.; Li, S. Morphological Features and Fractography Analysis for in Situ Spalling in the China Jinping Underground Laboratory with a 2400 m Burial Depth. Tunn. Undergr. Space Technol. 2021, 118, 104194. [Google Scholar] [CrossRef]
- You, R.-Z.; Yi, T.-H.; Ren, L.; Li, H.-N. Equivalent Estimation Method (EEM) for Quasi-Distributed Bridge-Deflection Measurement Using Only Strain Data. Measurement 2023, 221, 113492. [Google Scholar] [CrossRef]
- You, R.-Z.; Yi, T.-H.; Ren, L.; Li, H.-N. Distributed Bending Stiffness Estimation of Bridges Using Adaptive Inverse Unit Load Method. Eng. Struct. 2023, 297, 116981. [Google Scholar] [CrossRef]
- Cook, N.G.W. Seismicity Associated with Mining. Eng. Geol. 1976, 10, 99–122. [Google Scholar] [CrossRef]
- Wamriew, D.; Dorhjie, D.B.; Bogoedov, D.; Pevzner, R.; Maltsev, E.; Charara, M.; Pissarenko, D.; Koroteev, D. Microseismic Monitoring and Analysis Using Cutting-Edge Technology: A Key Enabler for Reservoir Characterization. Remote Sens. 2022, 14, 3417. [Google Scholar] [CrossRef]
- Chen, X.; Li, W.; Yan, X. Analysis on Rock Burst Danger when Fully-Mechanized Caving Coal Face Passed Fault with Deep Mining. Saf. Sci. 2012, 50, 645–648. [Google Scholar] [CrossRef]
- Zhang, W.; Feng, X.-T.; Yao, Z.-B.; Hu, L.; Xiao, Y.-X.; Feng, G.-L.; Niu, W.-J.; Zhang, Y. Development and Occurrence Mechanisms of Fault-Slip Rockburst in a Deep Tunnel Excavated by Drilling and Blasting: A Case Study. Rock Mech. Rock Eng. 2022, 55, 5599–5618. [Google Scholar] [CrossRef]
- BABEL Working Group Evidence for Early Proterozoic Plate Tectonics from Seismic Reflection Profiles in the Baltic Shield. Nature 1990, 348, 34–38. [CrossRef]
- Alimoradi, A.; Moradzadeh, A.; Naderi, R.; Salehi, M.Z.; Etemadi, A. Prediction of Geological Hazardous Zones in Front of a Tunnel Face Using TSP-203 and Artificial Neural Networks. Tunn. Undergr. Space Technol. 2008, 23, 711–717. [Google Scholar] [CrossRef]
- Claerbout, J.F. Toward a Unified Theory of Reflector Mapping. Geophysics 1971, 36, 467–481. [Google Scholar] [CrossRef]
- French, W.S. Computer Migration of Oblique Seismic Reflection Profiles. Geophysics 1975, 40, 961–980. [Google Scholar] [CrossRef]
- McMechan, G.A. Migration by Extrapolation of Time-Dependent Boundary Values. Geophys. Prospect. 1983, 31, 413–420. [Google Scholar] [CrossRef]
- Dai, S.; Ma, C. Application of TSP Tunnel Geological Prediction for Case Study. In Mechatronics and Intelligent Materials II, Pts 1–6; Chen, R., Sung, W.P., Eds.; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2012; Volume 490–495, pp. 1816–1820. [Google Scholar]
- Yokota, Y.; Yamamoto, T.; Shirasagi, S.; Koizumi, Y.; Descour, J.; Kohlhaas, M. Evaluation of Geological Conditions Ahead of TBM Tunnel Using Wireless Seismic Reflector Tracing System. Tunn. Undergr. Space Technol. 2016, 57, 85–90. [Google Scholar] [CrossRef]
- Li, S.; Liu, B.; Xu, X.; Nie, L.; Liu, Z.; Song, J.; Sun, H.; Chen, L.; Fan, K. An Overview of Ahead Geological Prospecting in Tunneling. Tunn. Undergr. Space Technol. 2017, 63, 69–94. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, P.; Guo, X.; Liu, B.; Chen, L.; Zhang, Q.; Nie, L.; Zhang, Y. A Case Study of Seismic Forward Prospecting Based on the Tunnel Seismic While Drilling and Active Seismic Methods. Bull. Eng. Geol. Environ. 2021, 80, 3553–3567. [Google Scholar] [CrossRef]
- Shapiro, N.M.; Campillo, M. Emergence of Broadband Rayleigh Waves from Correlations of the Ambient Seismic Noise. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Hou, S.; Liu, Y.; Yang, Q. Real-Time Prediction of Rock Mass Classification Based on TBM Operation Big Data and Stacking Technique of Ensemble Learning. J. Rock Mech. Geotech. Eng. 2022, 14, 123–143. [Google Scholar] [CrossRef]
- Nilot, E.A.; Fang, G.; Elita Li, Y.; Tan, Y.Z.; Cheng, A. Real-Time Tunneling Risk Forecasting Using Vibrations from the Working TBM. Tunn. Undergr. Space Technol. 2023, 139, 105213. [Google Scholar] [CrossRef]
- Wang, S.; Han, L.; Gong, X.; Zhang, S.; Huang, X.; Zhang, P. MCMC Method of Inverse Problems Using a Neural Network—Application in GPR Crosshole Full Waveform Inversion: A Numerical Simulation Study. Remote Sens. 2022, 14, 1320. [Google Scholar] [CrossRef]
- Lüth, S.; Giese, R.; Otto, P.; Krüger, K.; Mielitz, S.; Bohlen, T.; Dickmann, T. Seismic Investigations of the Piora Basin Using S-Wave Conversions at the Tunnel Face of the Piora Adit (Gotthard Base Tunnel). Int. J. Rock Mech. Min. Sci. 2008, 45, 86–93. [Google Scholar] [CrossRef]
- Qu, Y.; Zhou, C.; Liu, C.; Li, Z.; Li, J. P- and S-Wave Separated Elastic Reverse Time Migration for OBC Data from Fluid-Solid Coupled Media with Irregular Seabed Interfaces. J. Appl. Geophys. 2020, 172, 103882. [Google Scholar] [CrossRef]
- Neidell, N.S.; Taner, M.T. Semblance and Other Coherency Measures for Multichannel Data. Geophysics 1971, 36, 482–497. [Google Scholar] [CrossRef]
- Chen, B.-R.; Wang, X.; Zhu, X.; Wang, Q.; Xie, H. Real-Time Arrival Picking of Rock Microfracture Signals Based on Convolutional-Recurrent Neural Network and Its Engineering Application. J. Rock Mech. Geotech. Eng. 2023, 16, 761–777. [Google Scholar] [CrossRef]
- Bunks, C.; Saleck, F.M.; Zaleski, S.; Chavent, G. Multiscale Seismic Waveform Inversion. Geophysics 1995, 60, 1457–1473. [Google Scholar] [CrossRef]
- Boonyasiriwat, C.; Valasek, P.; Routh, P.; Cao, W.; Schuster, G.T.; Macy, B. An Efficient Multiscale Method for Time-Domain Waveform Tomography. Geophysics 2009, 74, WCC59–WCC68. [Google Scholar] [CrossRef]
- Wu, H.; Zhang, S.; Dong, X.; Zhu, H.; Lu, S. Joint Migration Inversion Based on a Full-Wavefield Acoustic Wave Equation with Vector Reflectivity. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5902411. [Google Scholar] [CrossRef]
- Ashida, Y. Seismic Imaging Ahead of a Tunnel Face with Three-Component Geophones. Int. J. Rock Mech. Min. Sci. 2001, 38, 823–831. [Google Scholar] [CrossRef]
- Xu, Y.; Xia, J.; Miller, R.D. Numerical Investigation of Implementation of Air-Earth Boundary by Acoustic-Elastic Boundary Approach. Geophysics 2007, 72, SM147–SM153. [Google Scholar] [CrossRef]
- Liu, L.; Shi, Z.; Peng, M.; Liu, C.; Tao, F.; Liu, C. Numerical Modeling for Karst Cavity Sonar Detection beneath Bored Cast in Situ Pile Using 3D Staggered Grid Finite Difference Method. Tunn. Undergr. Space Technol. 2018, 82, 50–65. [Google Scholar] [CrossRef]
- Hu, Q.; Dong, L. Acoustic Emission Source Location and Experimental Verification for Two-Dimensional Irregular Complex Structure. IEEE Sens. J. 2020, 20, 2679–2691. [Google Scholar] [CrossRef]
- Liu, L.; Li, S.; Zheng, M.; Wang, Y.; Shen, J.; Shi, Z.; Xia, C.; Zhou, J. Identification of Rock Discontinuities by Coda Wave Analysis While Borehole Drilling in Deep Buried Tunnels. Tunn. Undergr. Space Technol. 2024, 153, 105969. [Google Scholar] [CrossRef]
- Liu, L.; Li, S.; Zheng, M.; Wang, D.; Chen, M.; Zhou, J.; Yan, T.; Shi, Z. Inverting the Rock Mass P-Wave Velocity Field Ahead of Deep Buried Tunnel Face while Borehole Drilling. Int. J. Min. Sci. Technol. 2024, 34, 681–697. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | True Position | Source Location | Error in the y-Direction | Error in the x-Direction | Localization Error |
|---|---|---|---|---|---|
| (m) | (m) | (m) | (m) | (m) | |
| 1 | (5, 77) | (5.72, 75.88) | −0.72 | −1.02 | 1.25 |
| 2 | (7, 74) | (7.75, 72.81) | 0.75 | −1.21 | 1.42 |
| 3 | (10, 43) | (9.78, 43.33) | −1.22 | 0.33 | 1.26 |
| 4 | (10, 96) | (9.86, 96.31) | −0.14 | 0.31 | 0.34 |
| 5 | (6, 84) | (4.64, 86.51) | −1.36 | 2.51 | 2.85 |
| 6 | (6, 85) | (5.87, 85.01) | −0.13 | 0.01 | 0.13 |
| 7 | (8, 43) | (7.45, 43.30) | −0.55 | 0.30 | 0.63 |
| 8 | (8, 92) | (6.62, 95.12) | −1.38 | 3.12 | 3.41 |
| 9 | (7, 96) | (8.89, 91.75) | 1.89 | −4.25 | 4.65 |
| 10 | (6, 100) | (7.26, 97.38) | 1.266 | −2.62 | 2.91 |
| 11 | (10, 92) | (10.90, 90.19) | 0.9 | −1.81 | 2.02 |
| 12 | (5, 87) | (5.21, 86.49) | 0.21 | −0.51 | 0.55 |
| 13 | (5, 71) | (4.05, 72.03) | −0.95 | 1.03 | 1.40 |
| 14 | (5, 50) | (5.65, 49.41) | 0.65 | −0.59 | 0.88 |
| 15 | (5, 64) | (4.45, 64.84) | −0.55 | 0.84 | 1.00 |
| 16 | (10, 90) | (8.86, 92.59) | −1.14 | 2.59 | 2.83 |
| 17 | (6, 85) | (5.61, 85.45) | −0.39 | 0.45 | 0.60 |
| 18 | (15, 45) | (14.43, 45.53) | −0.57 | 0.53 | 0.78 |
| 19 | (10, 71) | (11.66, 68.46) | 1.66 | −2.54 | 3.03 |
| 20 | (18, 20) | (17.85, 19.90) | −0.15 | −0.1 | 0.18 |
| Blasting Number | Position x (m) | Position y (m) |
|---|---|---|
| 1 | 93 | 25 |
| 2 | 96 | 25 |
| 3 | 99 | 25 |
| 4 | 102 | 25 |
| 5 | 105 | 25 |
| Case | Stage | Fault Position in X-Axis (m) | Fault Thickness (m) |
|---|---|---|---|
| Rectangular fault model | 1 | 14 | × |
| 2 | 2 | 5 | |
| Single-dip structural fault model | 1 | 9 | × |
| 2 | 4 | 1 | |
| Double-dip structural fault mode | 1 | 9(7) | × |
| 2 | 2.3 | 2.1 | |
| Circular karst cave model | 1 | 13 | × |
| 2 | 1 | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, H.; Chen, B.; Liu, Q.; Xiao, Y.; Liu, L.; Zhu, X.; Li, P. A Real-Time Inverted Velocity Model for Fault Detection in Deep-Buried Hard Rock Tunnels Based on a Microseismic Monitoring System. Buildings 2024, 14, 2663. https://doi.org/10.3390/buildings14092663
Xie H, Chen B, Liu Q, Xiao Y, Liu L, Zhu X, Li P. A Real-Time Inverted Velocity Model for Fault Detection in Deep-Buried Hard Rock Tunnels Based on a Microseismic Monitoring System. Buildings. 2024; 14(9):2663. https://doi.org/10.3390/buildings14092663
Chicago/Turabian StyleXie, Houlin, Bingrui Chen, Qian Liu, Yaxun Xiao, Liu Liu, Xinhao Zhu, and Pengxiang Li. 2024. "A Real-Time Inverted Velocity Model for Fault Detection in Deep-Buried Hard Rock Tunnels Based on a Microseismic Monitoring System" Buildings 14, no. 9: 2663. https://doi.org/10.3390/buildings14092663