
Enhancements in the Virtual Support Force Method for Tunnel Excavation Problems
Abstract
1. Introduction
2. Virtual Support Force Method
2.1. Theoretical Background
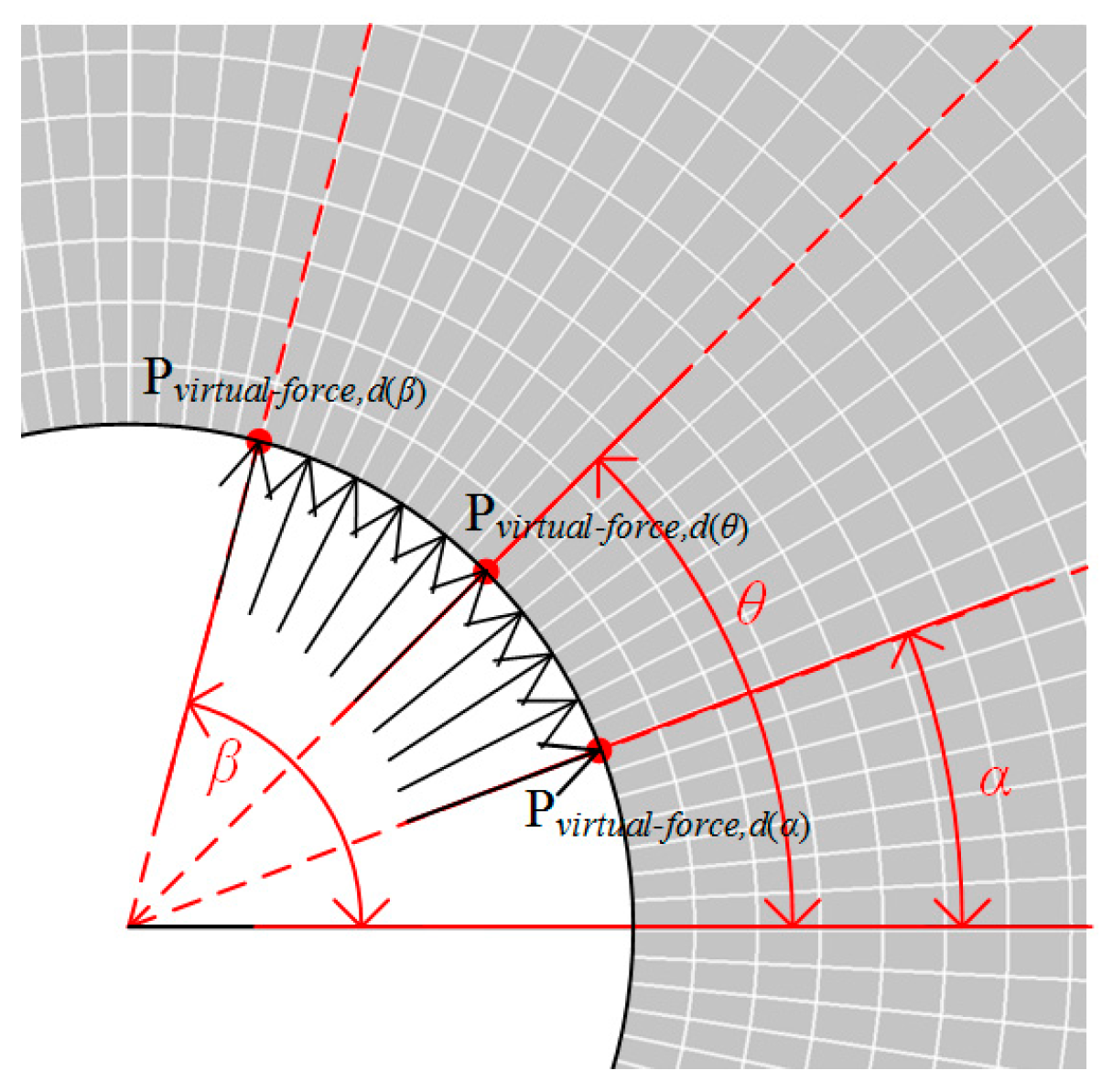
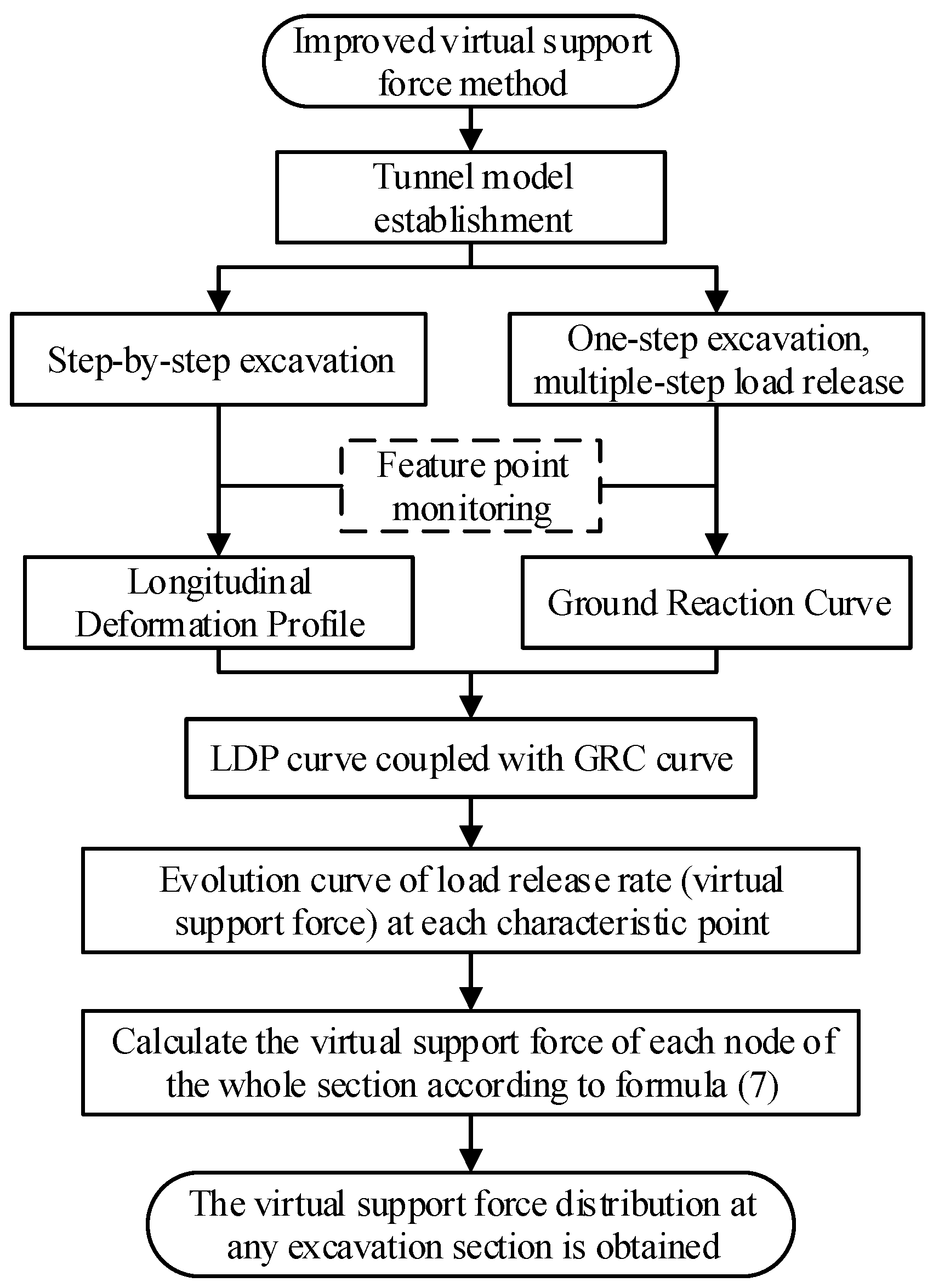
2.2. Improved Virtual Support Force Method
3. Improvement of the Implementation Process of Virtual Support Force Method
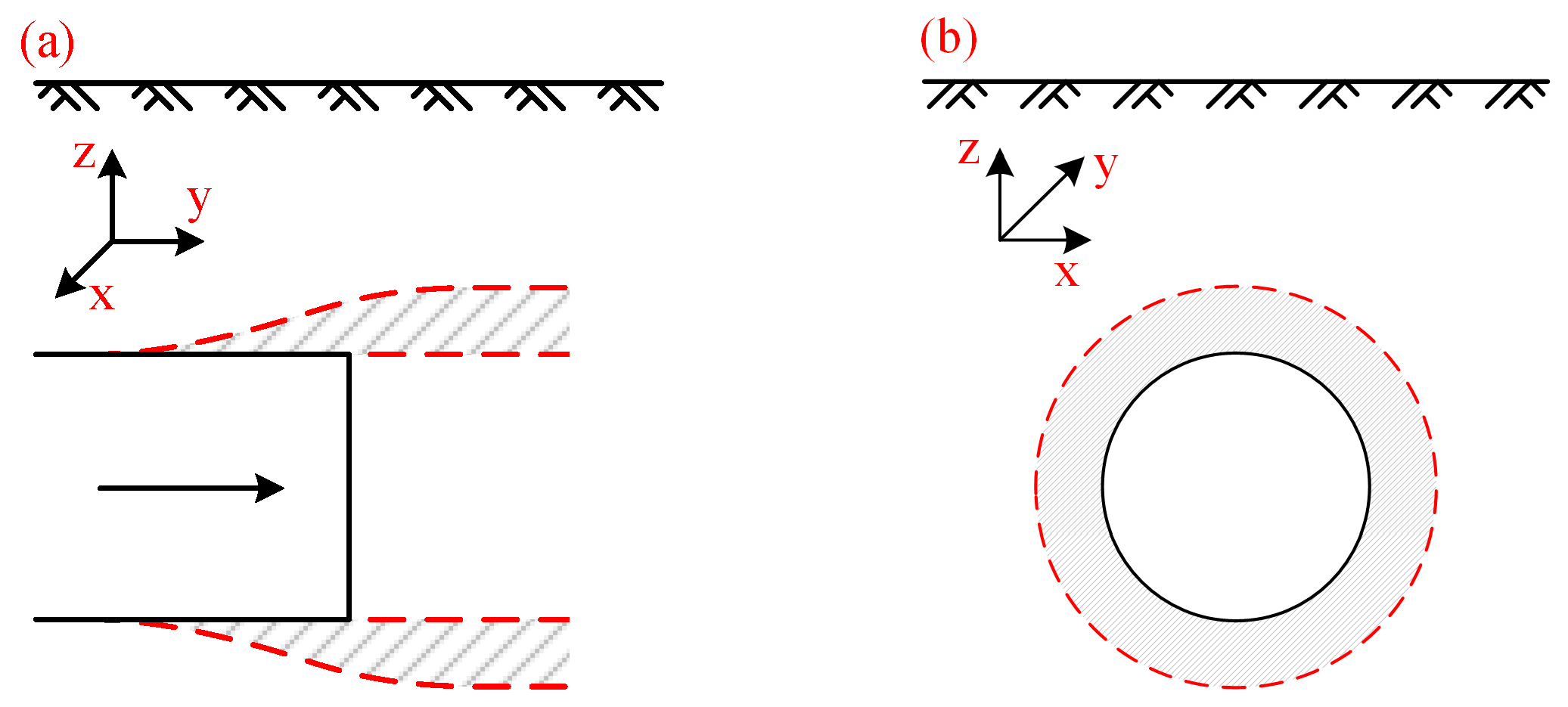
3.1. Model Introduction and Monitoring Settings
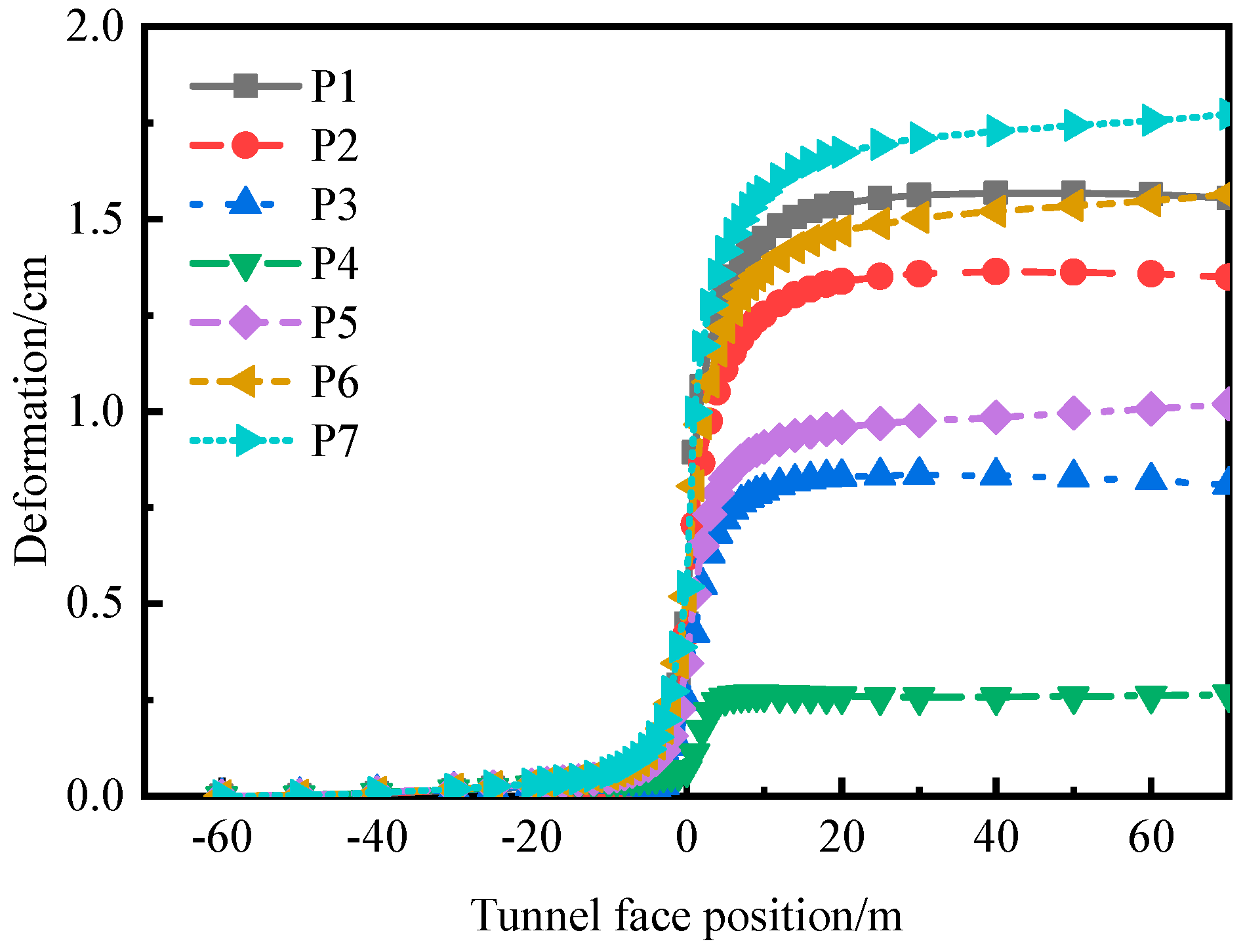
3.2. The Longitudinal Deformation Profile of Surrounding Rock
3.3. The Ground Reaction Curve of Surrounding Rock
3.4. LDP~GRC Coupling Analysis
4. Error Evaluation of Tunnel Face Spatial Effect
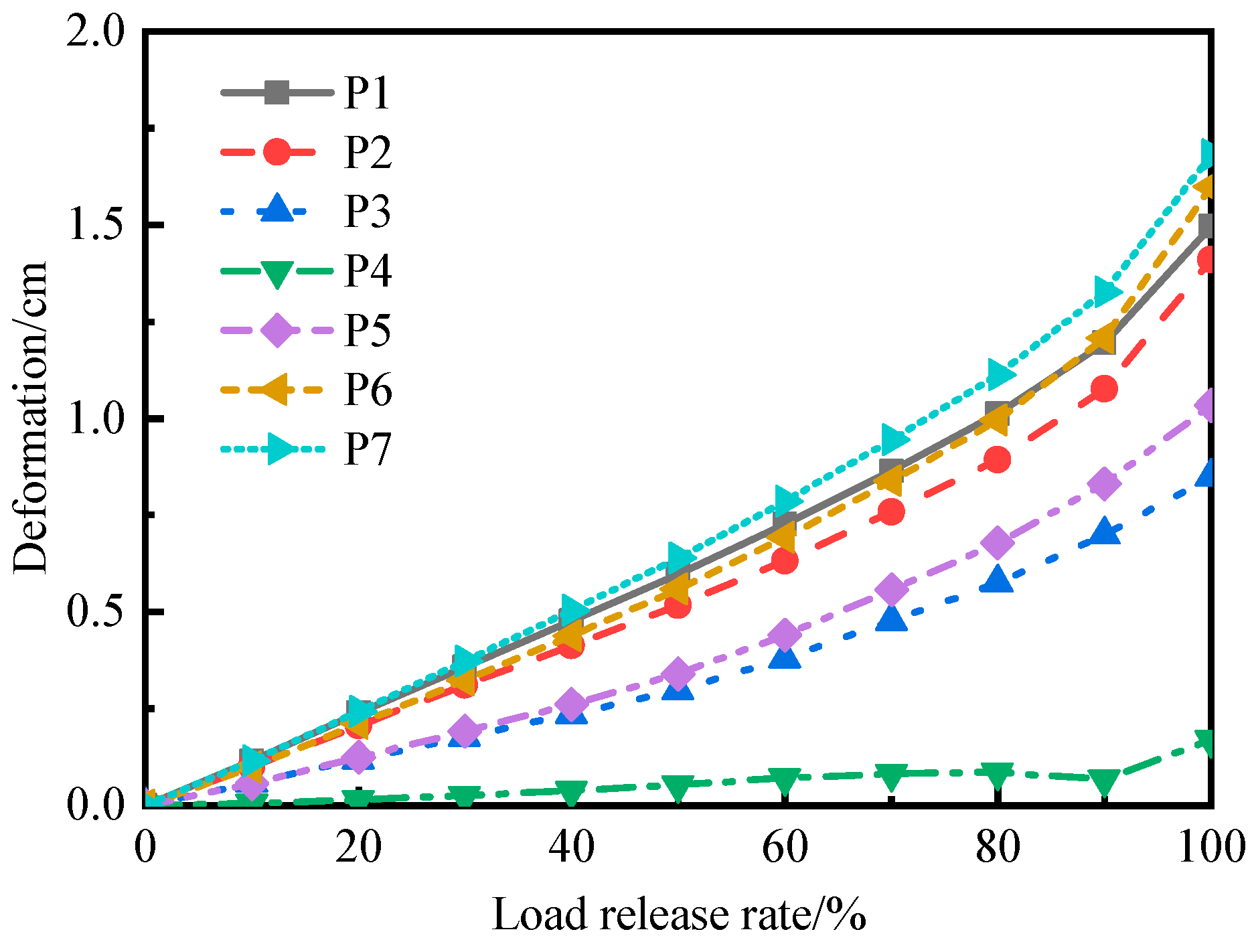
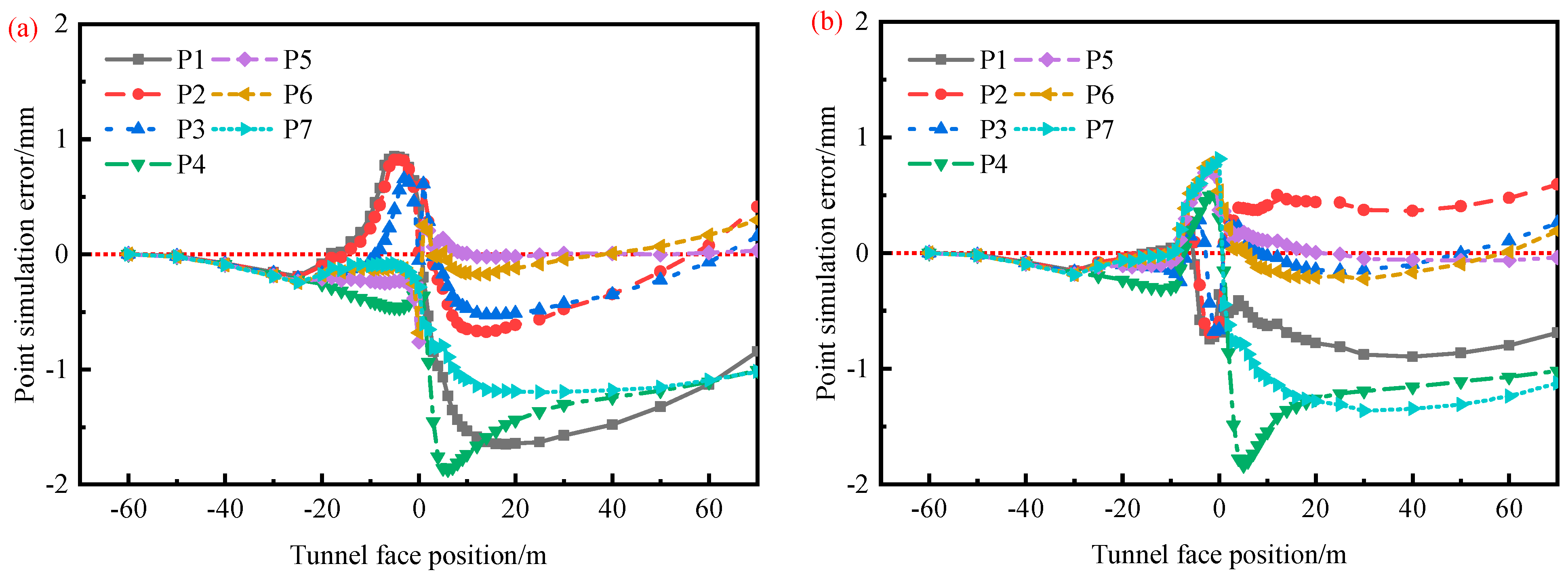
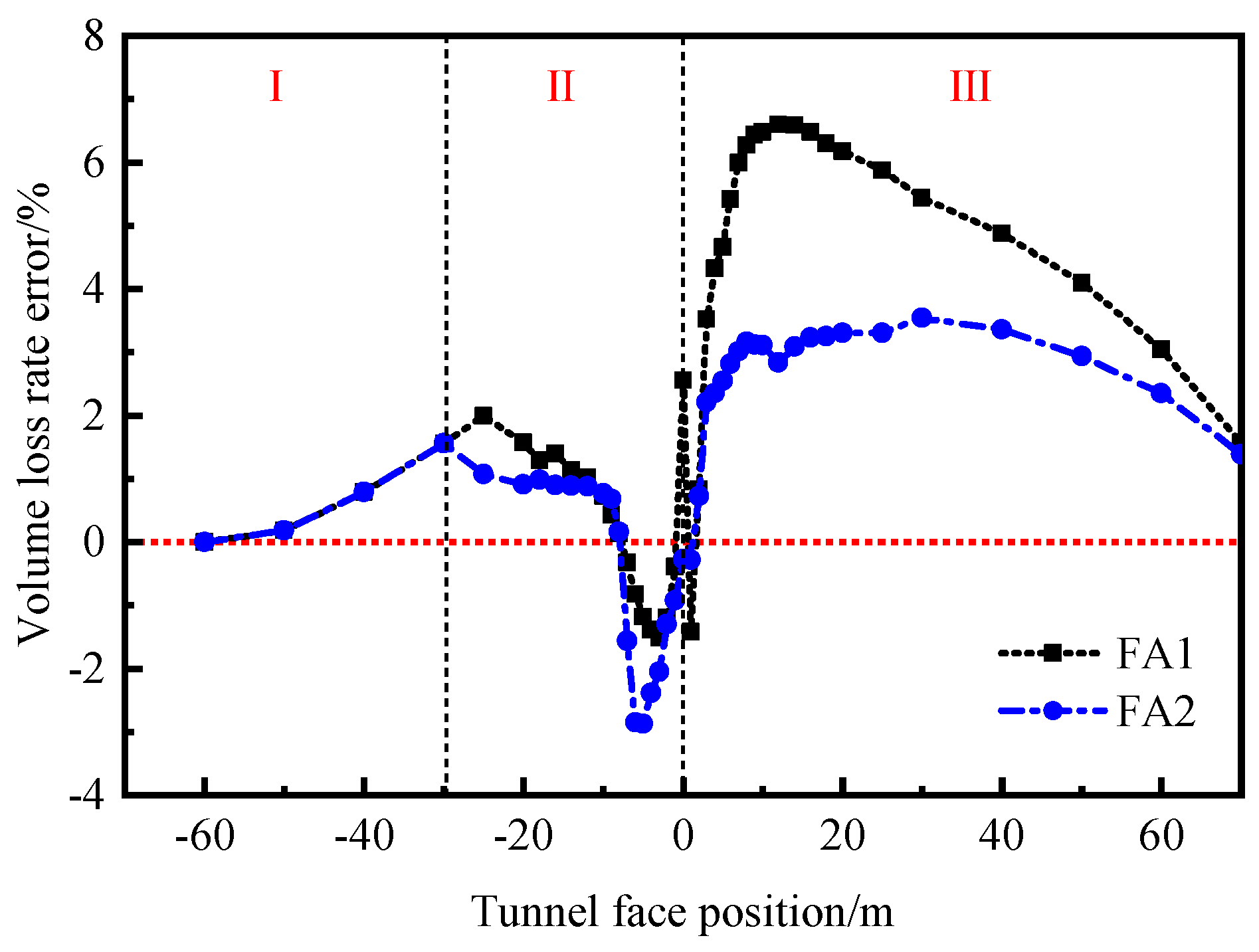
4.1. Section Deformation Error Analysis
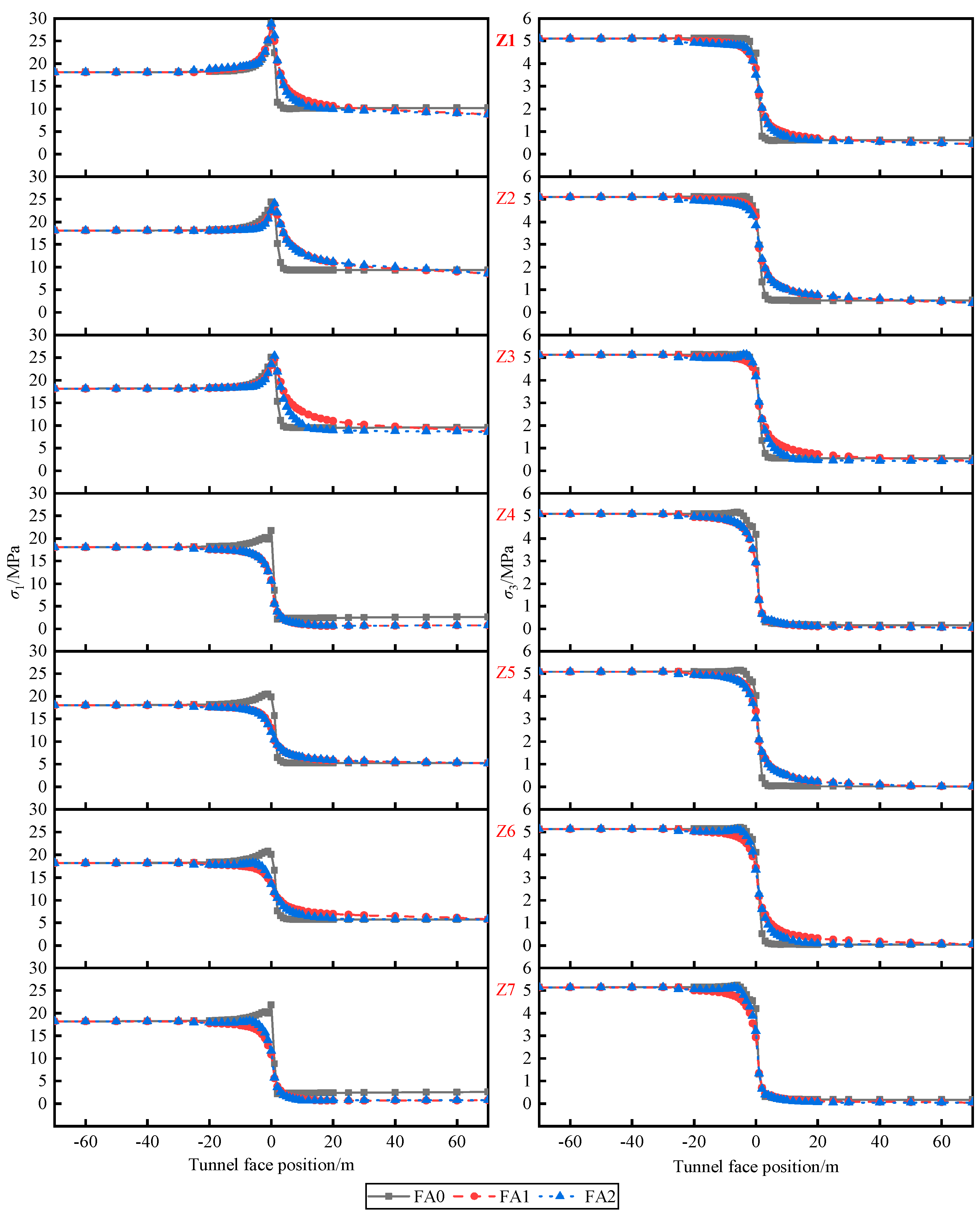
4.2. Stress Path Comparison Analysis
5. Application of Improved Virtual Support Force Method in Determining Tunnel Support Timing
- (1)
- According to the relationship curve between the displacement release coefficient and the position of the tunnel face obtained by numerical calculation, the numerical fitting and parameter determination are performed using Formula (12), and = 0.321 and = 2.714 are obtained. From the calculation results, the fitting variance, SSE = 0.0535, and the correlation coefficient, = 0.9950, are obtained. Substituting the parameters into Formula (12) and converting it into the formula of the y coordinate with respect to the displacement completion coefficient, , is shown in Formula (13):
- (2)
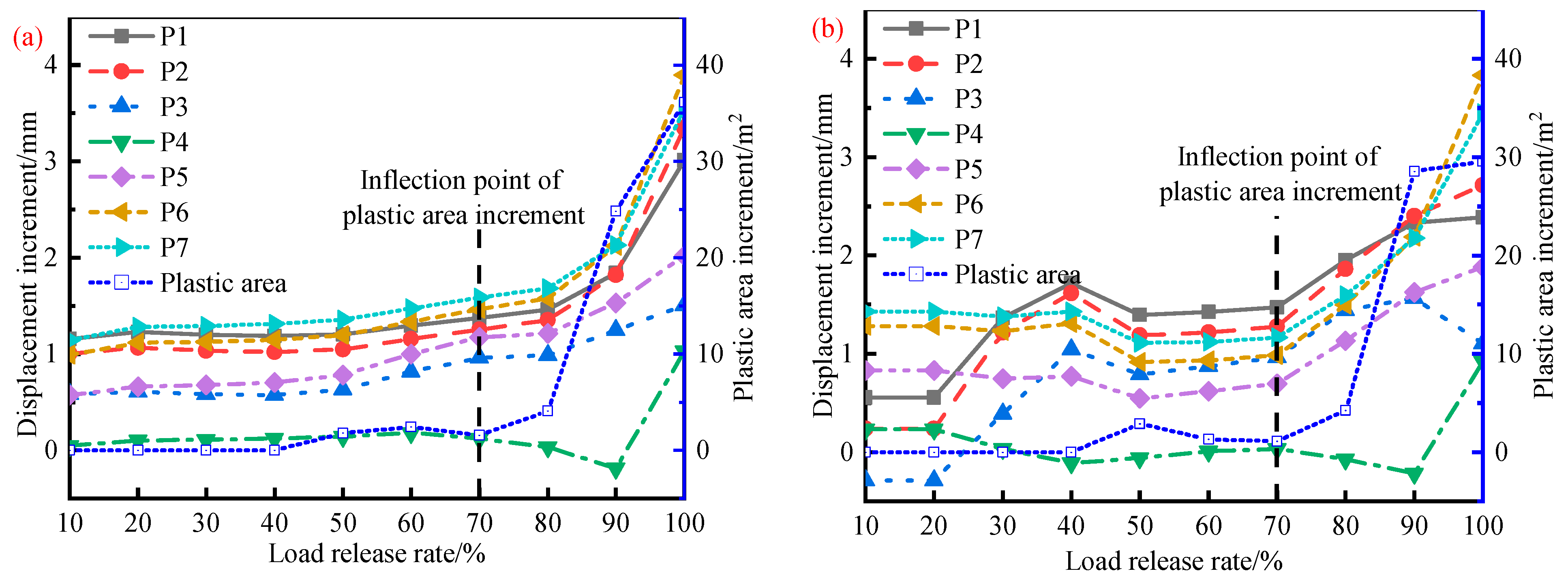
- Based on the two virtual support force methods, the displacement and plastic zone increment evolution curves during the load release process are plotted, as shown in Figure 14. The turning point where the displacement and plastic zone increments change from a gentle to an obvious increase is found as the recommended support time. It can be seen from the figure that the recommended support points obtained by the two methods are both at a load release rate of 70%.
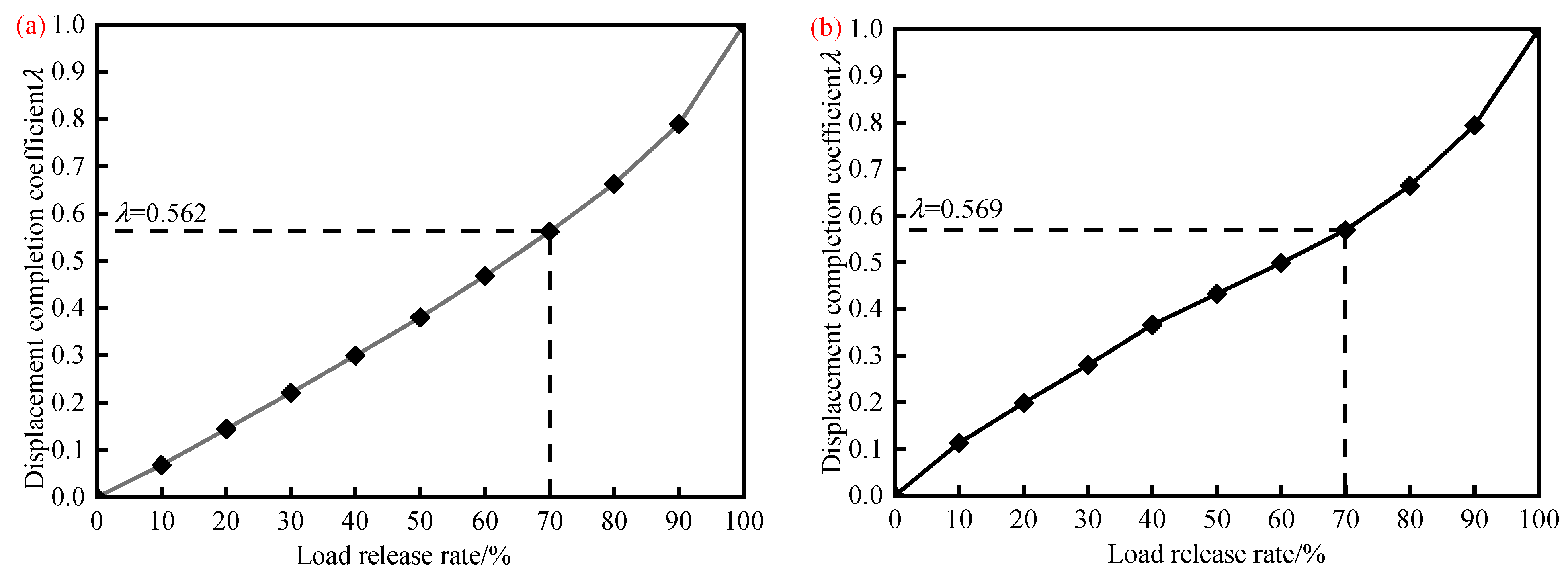
- (3)
- According to the displacement release coefficient and load release rate relationship curve (Figure 15), the displacement release coefficients corresponding to the recommended support points under uniform load release and non-uniform load release are 0.562 and 0.569, respectively. Finally, substituting them into Formula (13), the corresponding recommended support application points are 1.752 m and 1.817 m behind the tunnel face, respectively.
6. Results and Discussion
- (1)
- In the deep-buried Class III rock mass environment, during the tunnel excavation process, the surrounding rock above the tunnel waist on the excavation profile ahead of the tunnel face experiences a continuous reduction in spatial constraint due to the influence of the tunnel face. In contrast, the surrounding rock below the tunnel waist undergoes three stages: an initial reduction in spatial constraint, a slight increase, and then a further reduction. After the tunnel section is exposed and as the tunnel face moves away, the spatial constraint across the entire section continues to dissipate, with the dissipation occurring more slowly above the tunnel waist compared to below it.
- (2)
- From the perspective of deformation, we evaluate the simulation error of point-based and full-section simulations to assess the effectiveness of the virtual support method in replicating tunnel deformation. The improved virtual support method demonstrates smaller errors compared to traditional methods, with the maximum optimized error in volume loss reaching 3.76%.
- (3)
- In terms of stress, the improved virtual support method exhibits a higher degree of consistency with the true three-dimensional excavation results. To quantify the improvement, a stress error optimization metric is proposed, showing that the improved method can reduce the stress simulation error of the virtual support method by up to 15.64%. Therefore, the improved virtual support method provides a more accurate representation of the spatial confinement effects at the tunnel face.
- (4)
- In the study of determining the initial support timing, the support point calculated by the improved method is farther away from the tunnel face. The improved method can more fully mobilize the surrounding rock bearing and reduce support consumables. At the same time, since the difference between the support points obtained by the two methods is not large, under the premise of low accuracy requirements or the need to fully ensure the self-stability of the surrounding rock, the uniform release scheme of excavation load can also meet the requirements of the calculation of the recommended support construction timing.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Eberhardt, E. Numerical Modelling of Three-Dimension Stress Rotation Ahead of an Advancing Tunnel Face. Int. J. Rock Mech. Min. Sci. 2001, 38, 499–518. [Google Scholar] [CrossRef]
- Alejano, L.R.; Alonso, E.; Rodríguez-Dono, A.; Fernández-Manín, G. Application of the Convergence-Confinement Method to Tunnels in Rock Masses Exhibiting Hoek–Brown Strain-Softening Behaviour. Int. J. Rock Mech. Min. Sci. 2010, 47, 150–160. [Google Scholar] [CrossRef]
- Vlachopoulos, N.; Diederichs, M.S. Improved Longitudinal Displacement Profiles for Convergence Confinement Analysis of Deep Tunnels. Rock Mech. Rock Eng. 2009, 42, 131–146. [Google Scholar] [CrossRef]
- Li, J.P.; Duan, X.Q.; Yan, X.X. Numerical Study on Rules of Stress Release in Tunnel During Excavation. J. Water Res. Arch. Eng. 2007, 5, 59–62. [Google Scholar]
- Lisjak, A.; Grasselli, G.; Vietor, T. Continuum–Discontinuum Analysis of Failure Mechanisms around Unsupported Circular Excavations in Anisotropic Clay Shales. Int. J. Rock Mech. Min. Sci. 2014, 65, 96–115. [Google Scholar] [CrossRef]
- Xu, X.; Wu, Z.; Liu, Q. An Improved Numerical Manifold Method for Investigating the Mechanism of Tunnel Supports to Prevent Large Squeezing Deformation Hazards in Deep Tunnels. Comput. Geotech. 2022, 151, 104941. [Google Scholar] [CrossRef]
- Duncan, J.M.; Dunlop, P. Slopes in Stiff-Fissured Clays and Shales. J. Soil Mech. Found. Div. 1968, 95, 467–492. [Google Scholar] [CrossRef]
- Kielbassa, S.; Duddeck, H. Stress-Strain Fields at the Tunnelling Face? Three-Dimensional Analysis for Two-Dimensional Technical Approach. Rock Mech. Rock Eng. 1991, 24, 115–132. [Google Scholar] [CrossRef]
- Sun, J.; Zhu, H.H. Mechanical simulation and analysis of construction behavior of tunnel in soft surrounding rock. Rock Soil Mech. 1994, 20–33. [Google Scholar] [CrossRef]
- Zhu, H.H.; Yang, L.D. Theoretical basis of “generalized virtual support force method”. In Rock Mechanics Problems in Hydropower and Mining Engineering—Collection of the Academic Conference on Rock Mechanics and Engineering Applications in Northern China; China Science Publishing & Media Ltd.: Zhengzhou, China, 1991; pp. 184–188. [Google Scholar]
- Zhang, C.Q.; Feng, X.T.; Zhou, H.; Huang, S.L. Study of some problems about application of stress release method to tunnel excavation simulation. Rock Soil Mech. 2008, 29, 1174–1180. [Google Scholar] [CrossRef]
- Galli, G.; Grimaldi, A.; Leonardi, A. Three-Dimensional Modelling of Tunnel Excavation and Lining. Comput. Geotech. 2004, 31, 171–183. [Google Scholar] [CrossRef]
- Yang, Y.B.; Zheng, J.J.; Lai, H.J.; Wu, X.G. A Revised Method for Calculation Stress Release Ratio in Tunnel Excation. Chin. J. Rock Mech. Eng. 2015, 34, 2251–2257. [Google Scholar] [CrossRef]
- Su, K.; Zhang, Y.J.; Cui, J.P.; Li, C.A. Installation Time of Ground Support during Tunnel Excavation: A Novel Graph Methodology. KSCE J. Civ. Eng. 2020, 24, 3866–3874. [Google Scholar] [CrossRef]
- Yang, L.; Han, L.J.; Wei, L.Y. Analysis on reasonable tunnel support timing based on virtual support force. Mod. Tunn. Technol. 2012, 49, 66–71. [Google Scholar] [CrossRef]
- Zhou, Z.H.; He, C.; Chen, Z.Q.; Ma, W.B.; Wang, B.; Zhou, W.H. Virtual Supporting Force Method for Tunnel Support Timing Based on the Concept of Active Deformation Control of Surrounding Rock. Chin. Railw. Sci. 2022, 43, 76–88. [Google Scholar]
- Zhao, Y.; Li, S.C.; Zhao, Y.; Li, L.P. Model test study of surrounding rock load release during super-large section tunnel excavation. Chin. J. Rock Mech. Eng. 2012, 31, 3821–3830. [Google Scholar]
- Li, S.C.; Zhao, Y.; Li, L.P.; Zhou, Y.; Liu, Q. Study of construction section comprehensive load releasing process of ultra-large section railway tunnel. Rock Soil Mech. 2011, 32, 2845–2851. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Lian, Z.B.; Zhang, Q. Comparative Analysis of Excavation Unloading Simulation Methods for the Diversion Tunnel. Chin. J. Undergr. Space Eng. 2014, 10, 415–422. [Google Scholar]
- Mana, A.I.; Clough, G.W. Prediction of Movements for Braced Cuts in Clay. Geotech. Spec. Publ. 2002, 107, 1840–1858. [Google Scholar] [CrossRef]
- Sun, J. Mechanical Simulation of Construction Behavior of Caverns in Soft and Broken Surrounding Rock. In Underground Engineering Design Theory and Practice; Shanghai Science and Technology Press: Shanghai, China, 1996; pp. 119–153. [Google Scholar]
- Chu, Z.; Wu, Z.; Liu, B.; Liu, Q. Coupled Analytical Solutions for Deep-Buried Circular Lined Tunnels Considering Tunnel Face Advancement and Soft Rock Rheology Effects. Tunn. Undergr. Space Technol. 2019, 94, 103111. [Google Scholar] [CrossRef]
- Zhang, Y.-J.; Su, K.; Qian, Z.-D.; Wu, H.-G. Improved Longitudinal Displacement Profile and Initial Support for Tunnel Excavation. KSCE J. Civ. Eng. 2019, 23, 2746–2755. [Google Scholar] [CrossRef]
- Carranza-Torres, C.; Fairhurst, C. Application of the Convergence-Confinement Method of Tunnel Design to Rock Masses That Satisfy the Hoek-Brown Failure Criterion. Tunn. Undergr. Space Technol. 2000, 15, 187–213. [Google Scholar] [CrossRef]
- Cui, L.; Zheng, J.J.; Miao, C.X.; Dong, Y.K. Coupling analysis of longitudinal deformation profile and ground reaction curve. Chin. J. Geotech. Eng. 2014, 36, 707–715. [Google Scholar]
- Su, K.; Zhang, Y.J.; Chang, Z.H.; Wu, H.G.; Wang, T.; Zhou, W. Transverse Extent of Numerical Model for Deep Buried Tunnel Excavation. Tunn. Undergr. Space Technol. 2019, 84, 373–380. [Google Scholar] [CrossRef]
- Su, K.; Chang, Z.H.; Cui, J.P.; Wu, H.G. Study of model longitudinal range in numerical simulation of deep tunnel excavations. Rock Soil Mech. 2016, 37 (Suppl. S2), 706–714. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Zhang, D.L.; Hou, Y.J.; Li, A. Whole-process deformation laws and determination of stability criterion of surrounding rock of tunnels based on statistics of field measured data. Chin. J. Geotech. Eng. 2021, 43, 1261–1270, 1376–1377. [Google Scholar]
- Zhang, Y.J.; Su, K.; Zhou, L.; Wu, H.G. Estimation of ground support installation time based on the tunnel longitudinal displacement of convergence-confinement method. Rock Soil Mech. 2017, 38 (Suppl. S1), 471–478. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Su, K.; Zhu, H.Z.; Qian, Z.D.; Wu, H.G. Installation Time of an Initial Support for Tunnel Excavation upon the Safety Factors of Surrounding Rock. Appl. Sci. 2020, 10, 5653. [Google Scholar] [CrossRef]
- Zheng, W.T. Contrast on Strength Reduction Method and Point Safety Factor Method with FLAC 3D. J. Water Res. Archit. Eng. 2010, 8, 54–57. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stress Release Coefficient Expression | Detailed Description |
|---|---|
| (1) [9,10] | Where is the deformation of the tunnel wall at a distance from the tunnel face, and is the stable displacement. |
| (2) [13] | Where is the volume loss of the tunnel section at a distance from the tunnel face, and is the maximum volume loss. |
| (3) [22] | Where is the instantaneous stress release rate of the tunnel, . |
| (4) [23,24,25] | Where is the longitudinal deformation curve of the surrounding rock, and is the response curve of the surrounding rock. |
| Scheme Name | Method of Calculation | The Reference Point of Load Release Process |
|---|---|---|
| FA0 | Full section excavation step by step | - |
| FA1 | Virtual support force method | 1(P7) |
| FA2 | Improved virtual support force method | 7(P1~P7) |
| Monitoring Object | Z1 | Z2 | Z3 | Z4 | Z5 | Z6 | Z7 |
|---|---|---|---|---|---|---|---|
| 6.75 | 1.18 | 15.64 | 0.17 | 0.96 | 5.94 | 7.56 | |
| 3.33 | 2.16 | 7.40 | 0.67 | 0.81 | 6.73 | 7.68 |
| Scheme Name | /% | /m | ||
|---|---|---|---|---|
| Uniform release of cross-section excavation load | 1.1 | 72.513 | 0.588 | 1.259 |
| 1.2 | 55.255 | 0.426 | 0.467 | |
| 1.3 | 37.546 | 0.280 | −0.304 | |
| 1.4 | 18.465 | 0.133 | −2.503 | |
| Uneven release of cross-section excavation load | 1.1 | 73.575 | 0.603 | 1.419 |
| 1.2 | 53.439 | 0.455 | 0.580 | |
| 1.3 | 35.512 | 0.328 | 0.080 | |
| 1.4 | 20.534 | 0.203 | −1.242 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Su, K.; Tao, J.; Zhu, H. Enhancements in the Virtual Support Force Method for Tunnel Excavation Problems. Buildings 2024, 14, 2869. https://doi.org/10.3390/buildings14092869
Xu Z, Su K, Tao J, Zhu H. Enhancements in the Virtual Support Force Method for Tunnel Excavation Problems. Buildings. 2024; 14(9):2869. https://doi.org/10.3390/buildings14092869
Chicago/Turabian StyleXu, Zhendong, Kai Su, Jun Tao, and Hongze Zhu. 2024. "Enhancements in the Virtual Support Force Method for Tunnel Excavation Problems" Buildings 14, no. 9: 2869. https://doi.org/10.3390/buildings14092869
APA StyleXu, Z., Su, K., Tao, J., & Zhu, H. (2024). Enhancements in the Virtual Support Force Method for Tunnel Excavation Problems. Buildings, 14(9), 2869. https://doi.org/10.3390/buildings14092869