
Dynamic Prediction Method for Ground Settlement of Reclaimed Airports Based on Grey System Theory


Abstract
1. Introduction
2. Method
2.1. Grey Model
2.2. Sliding Window
2.3. Preprocessing Methods
- (1)
- Equidistant mechanism: After preprocessing, the data sequence provided to the grey system maintains uniform time intervals. For example, in settlement prediction, if the monitoring interval is set to one month, the grey system also uses data collected at one-month intervals. This approach allows the model to predict settlement for subsequent months using the available data. Data collection by the equidistant grey model is straightforward, as it only requires specifying the time interval for data acquisition. However, its predictive horizon is relatively short. For instance, a model using the equidistant mechanism may leverage one year of settlement data to predict settlement for the next three months, but it may not be suitable for longer-term predictions.
- (2)
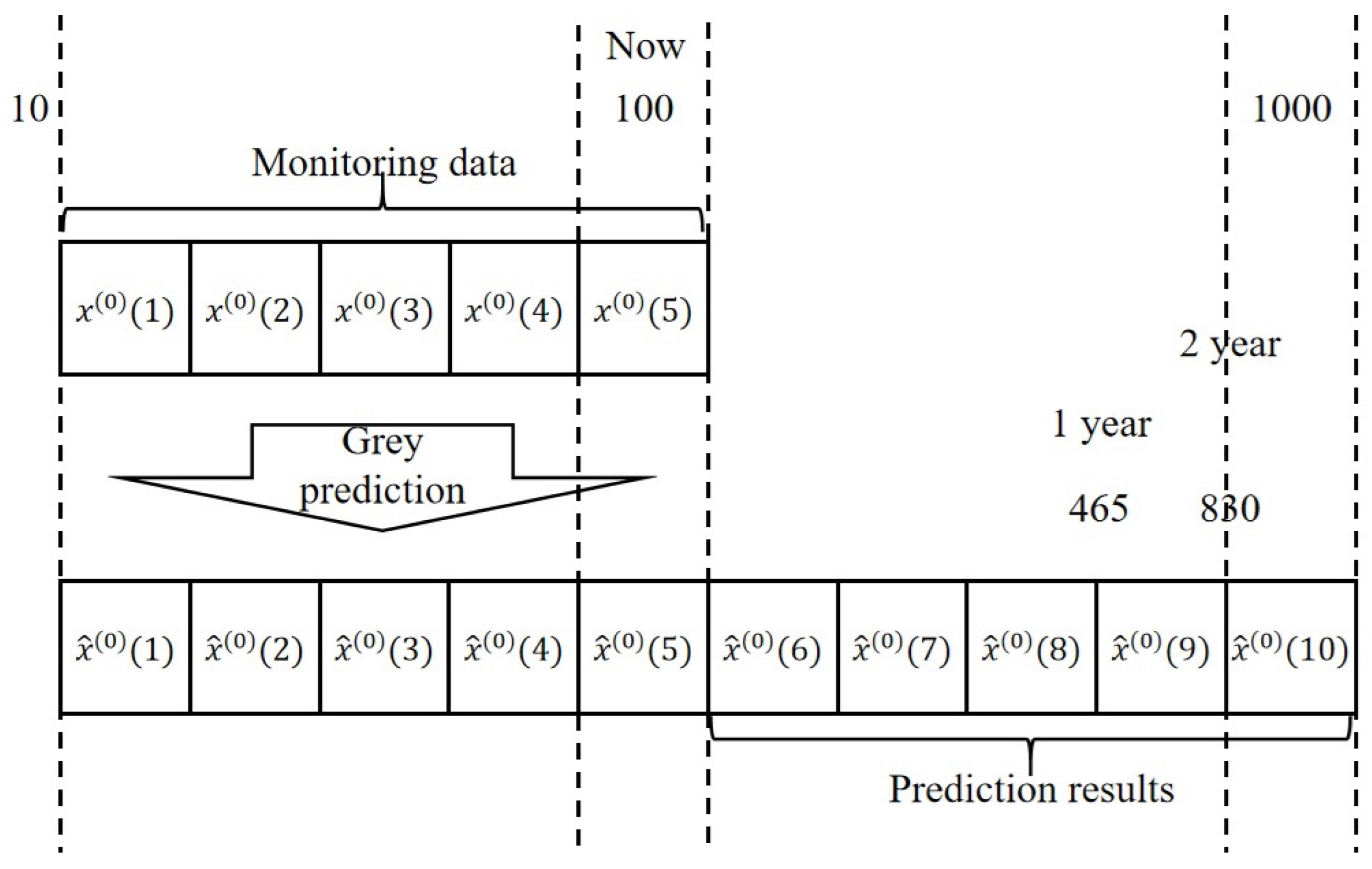
- Exponential increment mechanism: In this approach, the data sequence fed into the grey system has exponentially increasing time intervals after preprocessing. For example, in settlement prediction, the minimum monitoring interval is m days, and the exponential increment factor is . The monitoring times then become m days, days, days, days, and so on. These intervals appear “equidistant” on a logarithmic scale and serve as inputs for the grey model to make predictions. This mechanism is particularly suitable for long-term predictions, such as using data collected over one year to forecast settlement over a decade. However, it requires more extensive data collection, especially during the initial phase, as multiple sets of data with shorter monitoring intervals are needed at the outset.
2.4. Choosing Size of Sliding Window
3. Results
3.1. Settlement Prediction Experiment on Kansai International Airport Dataset
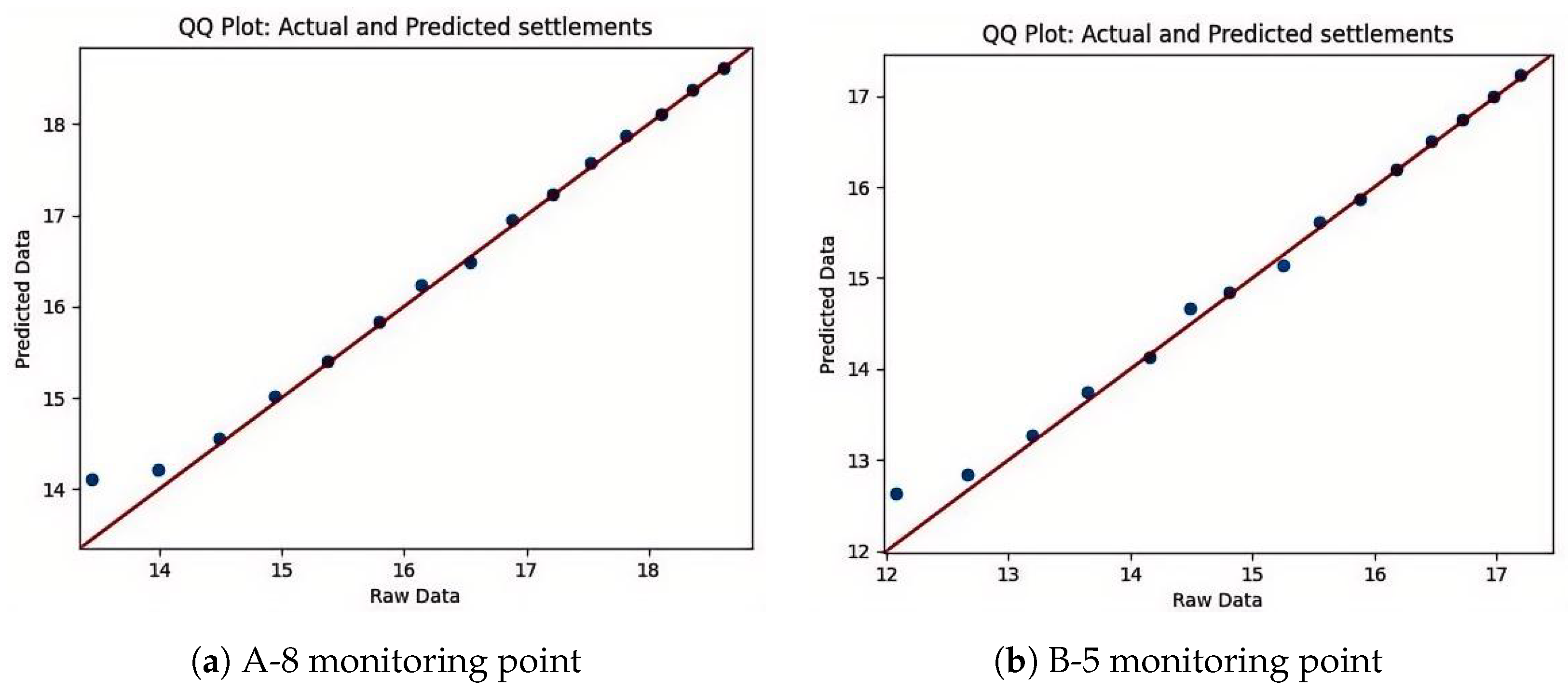
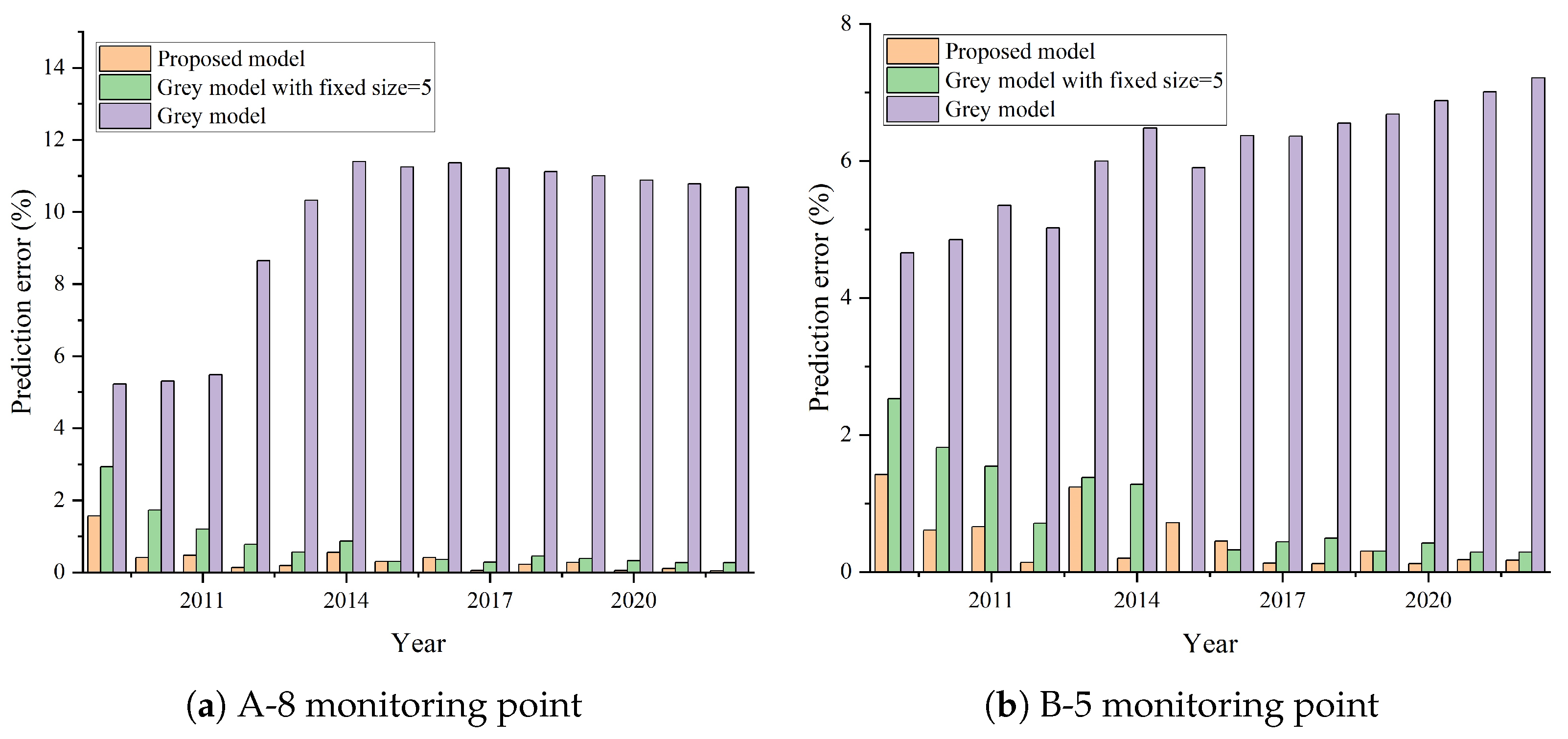
3.2. Settlement Prediction Experiment on Data from Xiamen Xiang’an International Airport
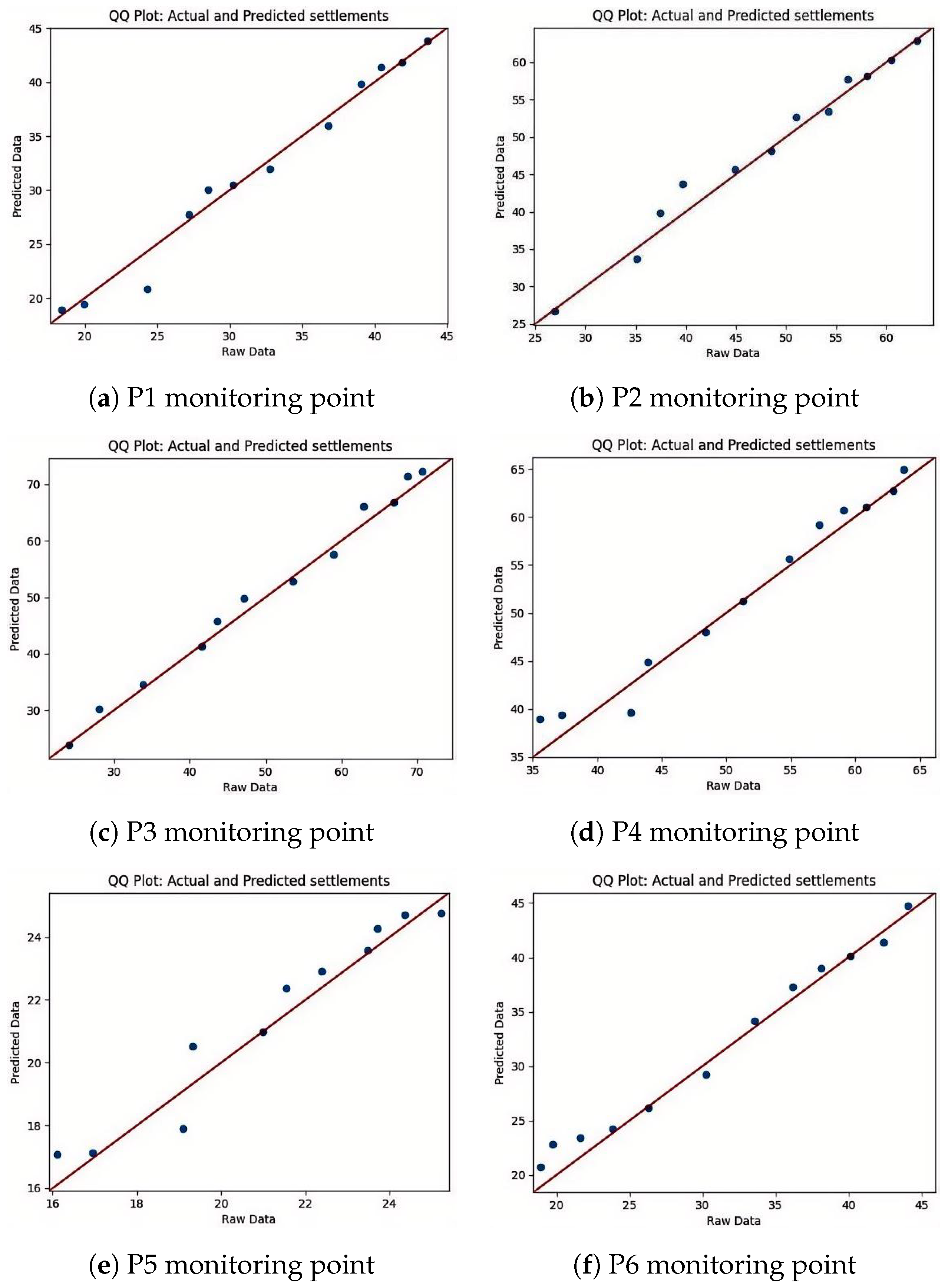
3.3. Settlement Prediction Experiment on Data from Shanghai Pudong International Airport
4. Discussion
4.1. Performance and Comparisons Between Different Models
4.2. Future Directions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FEM | finite element method |
| FDM | finite difference method |
| GM(1,1) | grey model (1,1) |
| MGM(1,n) | multivariable grey model (1,n) |
| development coefficient | |
| b | grey action quantity |
| the monitoring value of the k-th element in the sequence of settlement | |
| the monitoring value sequence of settlement | |
| the 1st-order accumulated generating operation sequence of | |
| the predictive value of the k-th element in the sequence of settlement | |
| RMSE | root-mean-square error |
| QQ Plot | quantile-quantile Plot |
References
- Mesri, G.; Funk, J. Settlement of the Kansai international airport islands. J. Geotech. Geoenviron. Eng. 2015, 141, 04014102. [Google Scholar]
- Dan, G.; Sultan, N.; Savoye, B. The 1979 Nice harbour catastrophe revisited: Trigger mechanism inferred from geotechnical measurements and numerical modelling. Mar. Geol. 2007, 245, 40–64. [Google Scholar]
- Fujima, K.; Shigihara, Y.; Tomita, T.; Honda, K.; Nobuoka, H.; Hanzawa, M.; Fujii, H.; Ohtani, H.; Orishimo, S.; Tatsumi, M.; et al. Survey results of the Indian Ocean tsunami in the Maldives. Coast. Eng. J. 2006, 48, 81–97. [Google Scholar]
- Shi, X.S.; Zhao, J. Practical estimation of compression behavior of clayey/silty sands using equivalent void-ratio concept. J. Geotech. Geoenviron. Eng. 2020, 146, 04020046. [Google Scholar]
- Nikakhtar, L.; Zare, S.; Nasirabad, H.M.; Ferdosi, B. Application of ANN-PSO algorithm based on FDM numerical modelling for back analysis of EPB TBM tunneling parameters. Eur. J. Environ. Civ. Eng. 2022, 26, 3169–3186. [Google Scholar] [CrossRef]
- Liu, C.; Wang, Z.; Liu, H.; Cui, J.; Huang, X.; Ma, L.; Zheng, S. Prediction of surface settlement caused by synchronous grouting during shield tunneling in coarse-grained soils: A combined FEM and machine learning approach. Undergr. Space 2024, 16, 206–223. [Google Scholar] [CrossRef]
- Feng, W.Q.; Yin, J.H. A new simplified Hypothesis B method for calculating consolidation settlements of double soil layers exhibiting creep. Int. J. Numer. Anal. Methods Geomech. 2017, 41, 899–917. [Google Scholar]
- Nour, A.; Slimani, A.; Laouami, N. Foundation settlement statistics via finite element analysis. Comput. Geotech. 2002, 29, 641–672. [Google Scholar]
- Sexton, B.G.; McCabe, B.A.; Castro, J. Appraising stone column settlement prediction methods using finite element analyses. Acta Geotech. 2014, 9, 993–1011. [Google Scholar]
- Al-Shamrani, M.A. Applicability of the rectangular hyperbolic method to settlement predictions of sabkha soils. Geotech. Geol. Eng. 2004, 22, 563–587. [Google Scholar]
- Fan, H.; Chen, Z.; Shen, J.; Cheng, J.; Chen, D.; Jiao, P. Buckling of steel tanks under measured settlement based on Poisson curve prediction model. Thin-Walled Struct. 2016, 106, 284–293. [Google Scholar] [CrossRef]
- Zhu, L.; Xing, X.; Zhu, Y.; Peng, W.; Yuan, Z.; Xia, Q. An advanced time-series InSAR approach based on poisson curve for soft clay highway deformation monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7682–7698. [Google Scholar]
- Wang, B.; Wang, X.; Ma, X. Study on optimal combination settlement prediction model based on logistic curve and Gompertz curve. Stavební Obz.-Civ. Eng. J. 2020, 29, 347–357. [Google Scholar]
- Pulket, T.; Arditi, D. Construction litigation prediction system using ant colony optimization. Constr. Manag. Econ. 2009, 27, 241–251. [Google Scholar]
- Song, Z.; Liu, S.; Jiang, M.; Yao, S. Research on the Settlement Prediction Model of Foundation Pit Based on the Improved PSO-SVM Model. Sci. Program. 2022, 2022, 1921378. [Google Scholar]
- Yang, P.; Yong, W.; Li, C.; Peng, K.; Wei, W.; Qiu, Y.; Zhou, J. Hybrid random forest-based models for earth pressure balance tunneling-induced ground settlement prediction. Appl. Sci. 2023, 13, 2574. [Google Scholar] [CrossRef]
- Xie, X.; Pan, C. Safety Prediction of Deep Foundation Pit Based on Neural Network and Entropy Fuzzy Evaluation. E3S Web Conf. 2021, 233, 03001. [Google Scholar]
- Cao, Y.; Zhou, X.; Yan, K. Deep learning neural network model for tunnel ground surface settlement prediction based on sensor data. Math. Probl. Eng. 2021, 2021, 9488892. [Google Scholar]
- Xie, S.L.; Hu, A.; Wang, M.; Xiao, Z.R.; Li, T.; Wang, C. 1DCNN-based prediction methods for subsequent settlement of subgrade with limited monitoring data. Eur. J. Environ. Civ. Eng. 2025, 29, 759–784. [Google Scholar]
- Deng, J.L. Control problems of grey systems. Syst. Control Lett. 1982, 1, 288–294. [Google Scholar]
- Tong, M.; Yan, Z.; Chao, L. Research on a grey prediction model of population growth based on a logistic approach. Discret. Dyn. Nat. Soc. 2020, 2020, 2416840. [Google Scholar] [CrossRef]
- Li, B.; He, C.; Hu, L.; Li, Y. Dynamical analysis on influencing factors of grain production in Henan province based on grey systems theory. Grey Syst. Theory Appl. 2012, 2, 45–53. [Google Scholar]
- Liu, C.; Xie, W.; Lao, T.; Yao, Y.t.; Zhang, J. Application of a novel grey forecasting model with time power term to predict China’s GDP. Grey Syst. Theory Appl. 2021, 11, 343–357. [Google Scholar] [CrossRef]
- Zhang, W.; Xiao, R.; Shi, B.; Zhu, H.h.; Sun, Y.j. Forecasting slope deformation field using correlated grey model updated with time correction factor and background value optimization. Eng. Geol. 2019, 260, 105215. [Google Scholar] [CrossRef]
- Wu, L.; Li, S.; Huang, R.; Xu, Q. A new grey prediction model and its application to predicting landslide displacement. Appl. Soft Comput. 2020, 95, 106543. [Google Scholar]
- Jin, S.J.; Zhang, D.S.; Shu, Z.; Zhao, Y. Grey model theory used in prediction of subgrade settlement. Appl. Mech. Mater. 2012, 105, 1576–1579. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, G. Prediction of composite foundation settlement based on multi-variable gray model. Appl. Mech. Mater. 2014, 580, 669–673. [Google Scholar] [CrossRef]
- Zhang, J.; Qin, Y.; Zhang, X.; Che, G.; Sun, X.; Duo, H. Application of non-equidistant GM(1,1) model based on the fractional-order accumulation in building settlement monitoring. J. Intell. Fuzzy Syst. 2022, 42, 1559–1573. [Google Scholar] [CrossRef]
- Zhang, C.; Li, J.z.; He, Y. Application of optimized grey discrete Verhulst–BP neural network model in settlement prediction of foundation pit. Environ. Earth Sci. 2019, 78, 441. [Google Scholar] [CrossRef]
- Xiong, Z.; Deng, K.; Feng, G.; Miao, L.; Li, K.; He, C.; He, Y. Settlement prediction of reclaimed coastal airports with InSAR observation: A case study of the Xiamen Xiang’an International Airport, China. Remote Sens. 2022, 14, 3081. [Google Scholar] [CrossRef]
- Zeng, J.J.; Feng, P.; Dai, J.G.; Zhuge, Y. Development and behavior of novel FRP-UHPC tubular members. Eng. Struct. 2022, 266, 114540. [Google Scholar]
- Douglas, I.; Lawson, N. Airport construction: Materials use and geomorphic change. J. Air Transp. Manag. 2003, 9, 177–185. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measured Value (m) | Proposed Model | Grey Model | Fixed-Size Window | |||||
|---|---|---|---|---|---|---|---|---|
| Next 1 | Next 2 | Next 1 | Next 1 | Next 2 | ||||
| 2003 | 8.55 | - | - | - | - | - | ||
| 2004 | 9.87 | - | - | - | - | - | ||
| 2005 | 11.13 | - | - | - | - | - | ||
| 2006 | 12.08 | - | - | - | - | - | ||
| 2007 | 12.82 | - | - | - | - | - | ||
| 2008 | 13.45 | 4.91% | - | 4.91% | 4.91% | - | ||
| 2009 | 13.99 | 1.57% | 9.79% | 5.22% | 2.93% | 9.79% | ||
| 2010 | 14.49 | 0.41% | 3.52% | 5.31% | 1.73% | 5.73% | ||
| 2011 | 14.94 | 0.47% | 1.27% | 5.49% | 1.20% | 3.61% | ||
| 2012 | 15.38 | 0.13% | 1.04% | 8.65% | 0.78% | 2.41% | ||
| 2013 | 15.80 | 0.19% | 0.51% | 10.32% | 0.57% | 1.58% | ||
| 2014 | 16.14 | 0.56% | 0.99% | 11.40% | 0.87% | 1.61% | ||
| 2015 | 16.54 | −0.30% | 0.79% | 11.25% | 0.30% | 1.27% | ||
| 2016 | 16.88 | 0.41% | 1.90% | 11.37% | 0.36% | 0.89% | ||
| 2017 | 17.22 | 0.06% | 0.87% | 11.21% | 0.29% | 0.75% | ||
| 2018 | 17.53 | 0.23% | 0.29% | 11.12% | 0.46% | 0.74% | ||
| 2019 | 17.82 | 0.28% | 0.62% | 11.00% | 0.39% | 0.95% | ||
| 2020 | 18.10 | 0.06% | 0.61% | 10.88% | 0.33% | 0.77% | ||
| 2021 | 18.36 | 0.11% | 0.27% | 10.78% | 0.27% | 0.71% | ||
| 2022 | 18.61 | 0.05% | 0.32% | 10.69% | 0.27% | 0.59% | ||
| RSME | - | 0.1851 | 0.4145 | 1.6395 | 0.2615 | 0.4857 | ||
| t-value (DF = 13) | - | −2.8494 | −2.6659 | −12.3249 | −3.8979 | −3.5789 | ||
| Measured Value (m) | Proposed Model | Grey Model | Fixed-Size Window | |||||
|---|---|---|---|---|---|---|---|---|
| Next 1 | Next 2 | Next 1 | Next 1 | Next 2 | ||||
| 2003 | 7.20 | - | - | - | - | - | ||
| 2004 | 8.75 | - | - | - | - | - | ||
| 2005 | 9.89 | - | - | - | - | - | ||
| 2006 | 10.72 | - | - | - | - | - | ||
| 2007 | 11.46 | - | - | - | - | - | ||
| 2008 | 12.08 | 4.55% | - | 4.55% | 4.55% | - | ||
| 2009 | 12.66 | 1.42% | 8.85% | 4.66% | 2.53% | 8.85% | ||
| 2010 | 13.19 | 0.61% | 3.34% | 4.85% | 1.82% | 5.16% | ||
| 2011 | 13.65 | 0.66% | 1.83% | 5.35% | 1.54% | 3.88% | ||
| 2012 | 14.15 | −0.14% | 1.13% | 5.02% | 0.71% | 2.61% | ||
| 2013 | 14.49 | 1.24% | 0.90% | 6.00% | 1.38% | 2.48% | ||
| 2014 | 14.81 | 0.20% | 2.70% | 6.48% | 1.28% | 2.90% | ||
| 2015 | 15.25 | −0.72% | −0.39% | 5.90% | 0.00% | 1.44% | ||
| 2016 | 15.55 | 0.45% | −0.51% | 6.37% | 0.32% | 0.77% | ||
| 2017 | 15.88 | −0.13% | 0.94% | 6.36% | 0.44% | 0.69% | ||
| 2018 | 16.18 | 0.12% | −0.06% | 6.55% | 0.49% | 0.99% | ||
| 2019 | 16.46 | 0.30% | 0.43% | 6.68% | 0.30% | 1.09% | ||
| 2020 | 16.72 | 0.12% | 0.72% | 6.88% | 0.42% | 0.72% | ||
| 2021 | 16.97 | 0.18% | 0.35% | 7.01% | 0.29% | 0.82% | ||
| 2022 | 17.20 | 0.17% | 0.47% | 7.21% | 0.29% | 0.70% | ||
| RSME | - | 0.1644 | 0.3561 | 0.9379 | 0.2031 | 0.4335 | ||
| t-value (DF = 13) | - | −2.2205 | −2.4865 | −16.9147 | −4.778 | −4.3224 | ||
| Dynamic | Requirements for Data | Demand for Resources | |
|---|---|---|---|
| Proposed model | Yes | Small size, easy to obtain | Low |
| Models based on consolidation theory | No | Small size, easy to obtain | Moderate |
| Models based on function fitting | No | Small size, easy to obtain | Low |
| Models based on machine learning | Yes/no | Big size, difficult to obtain | High |
| Other grey system-based models | No | Small size, easy to obtain | Low |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, K.; Weng, H.; Luo, Z.; Sarajpoor, S.; Chen, Y. Dynamic Prediction Method for Ground Settlement of Reclaimed Airports Based on Grey System Theory. Buildings 2025, 15, 1034. https://doi.org/10.3390/buildings15071034
Ma K, Weng H, Luo Z, Sarajpoor S, Chen Y. Dynamic Prediction Method for Ground Settlement of Reclaimed Airports Based on Grey System Theory. Buildings. 2025; 15(7):1034. https://doi.org/10.3390/buildings15071034
Chicago/Turabian StyleMa, Ke, He Weng, Zhaojun Luo, Saeed Sarajpoor, and Yumin Chen. 2025. "Dynamic Prediction Method for Ground Settlement of Reclaimed Airports Based on Grey System Theory" Buildings 15, no. 7: 1034. https://doi.org/10.3390/buildings15071034
APA StyleMa, K., Weng, H., Luo, Z., Sarajpoor, S., & Chen, Y. (2025). Dynamic Prediction Method for Ground Settlement of Reclaimed Airports Based on Grey System Theory. Buildings, 15(7), 1034. https://doi.org/10.3390/buildings15071034