
Integrated Optimization System for Geotechnical Parameter Inversion Using ABAQUS, Python, and MATLAB


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Physical Model Tests
3. DC Model and Parameters to Be Inverted
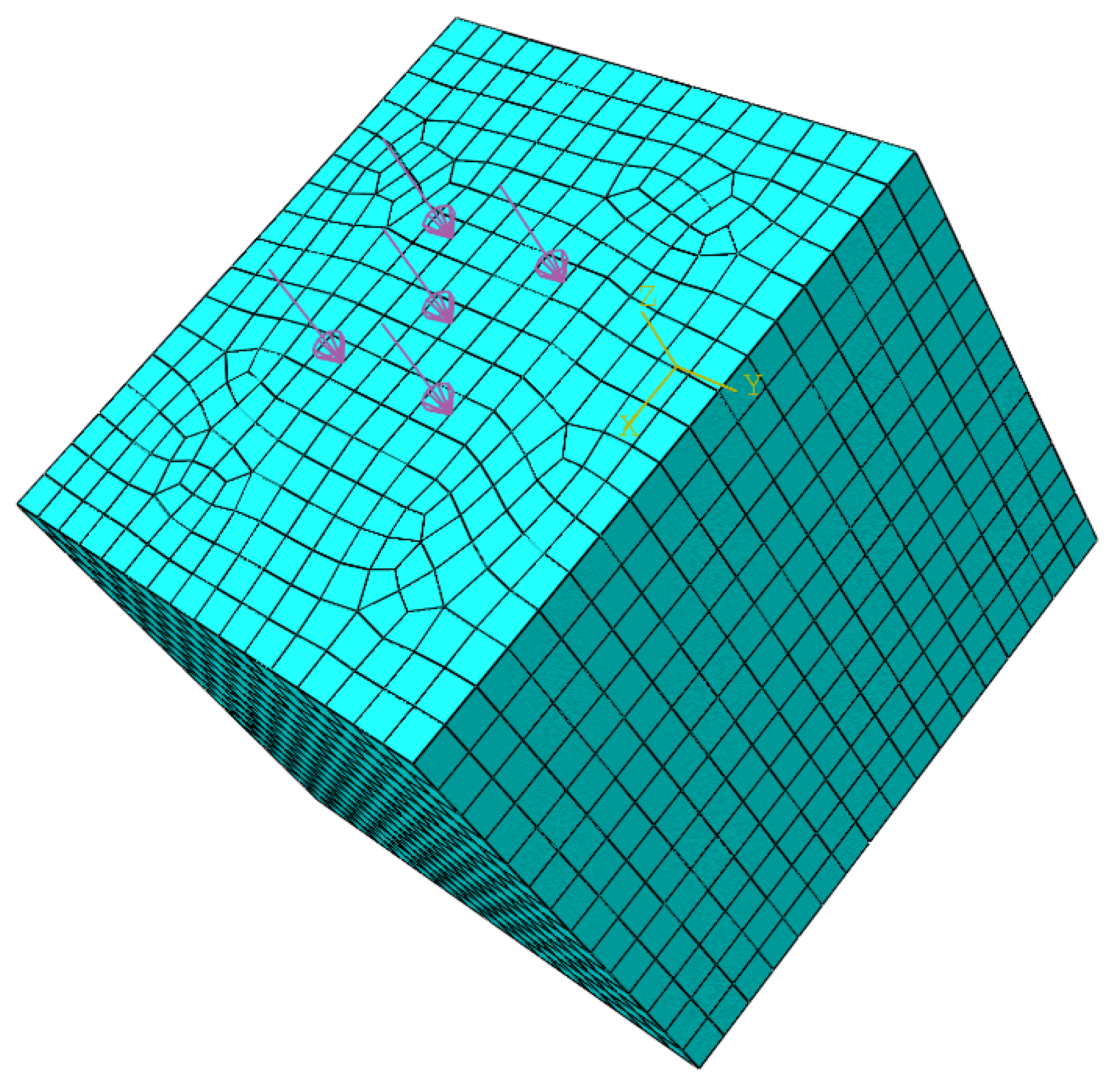
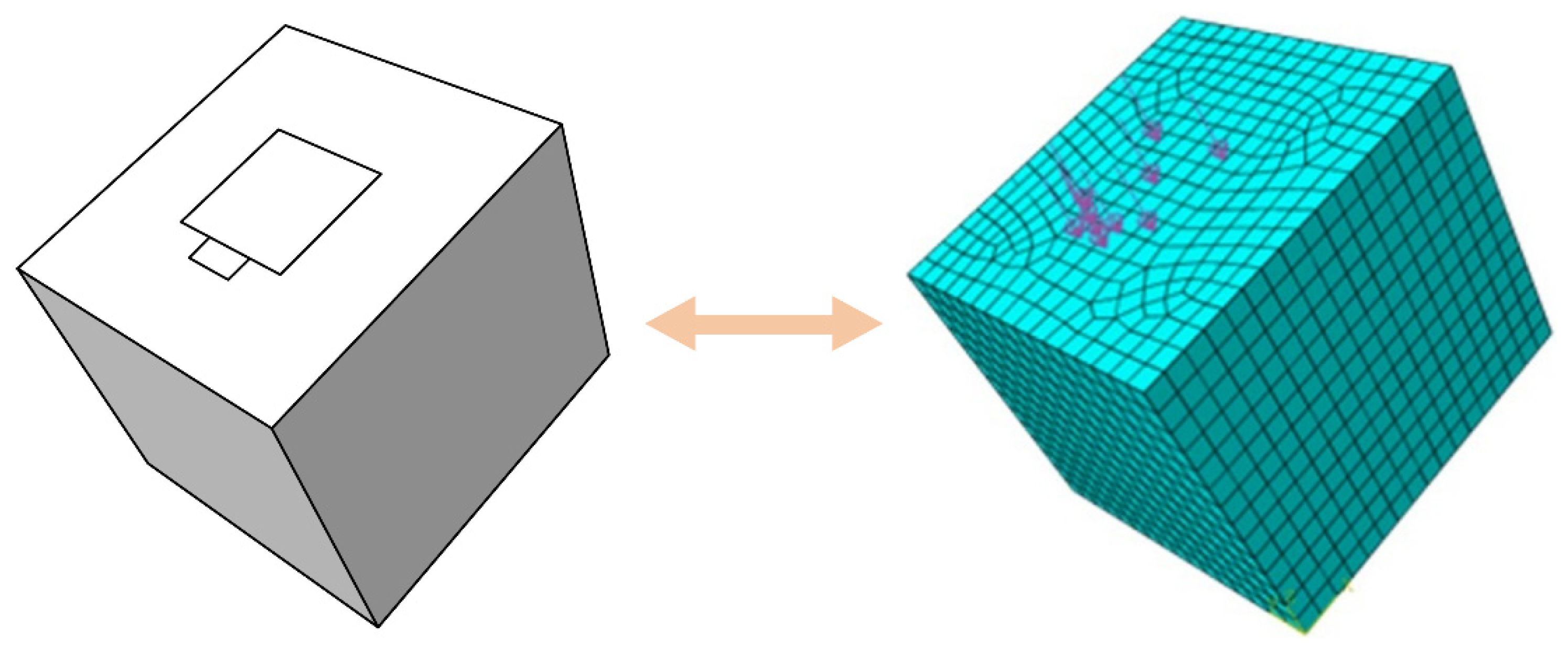
4. Implementation of the DC Model in ABAQUS
5. Adaptive Genetic Algorithm
6. Joint Optimization Method
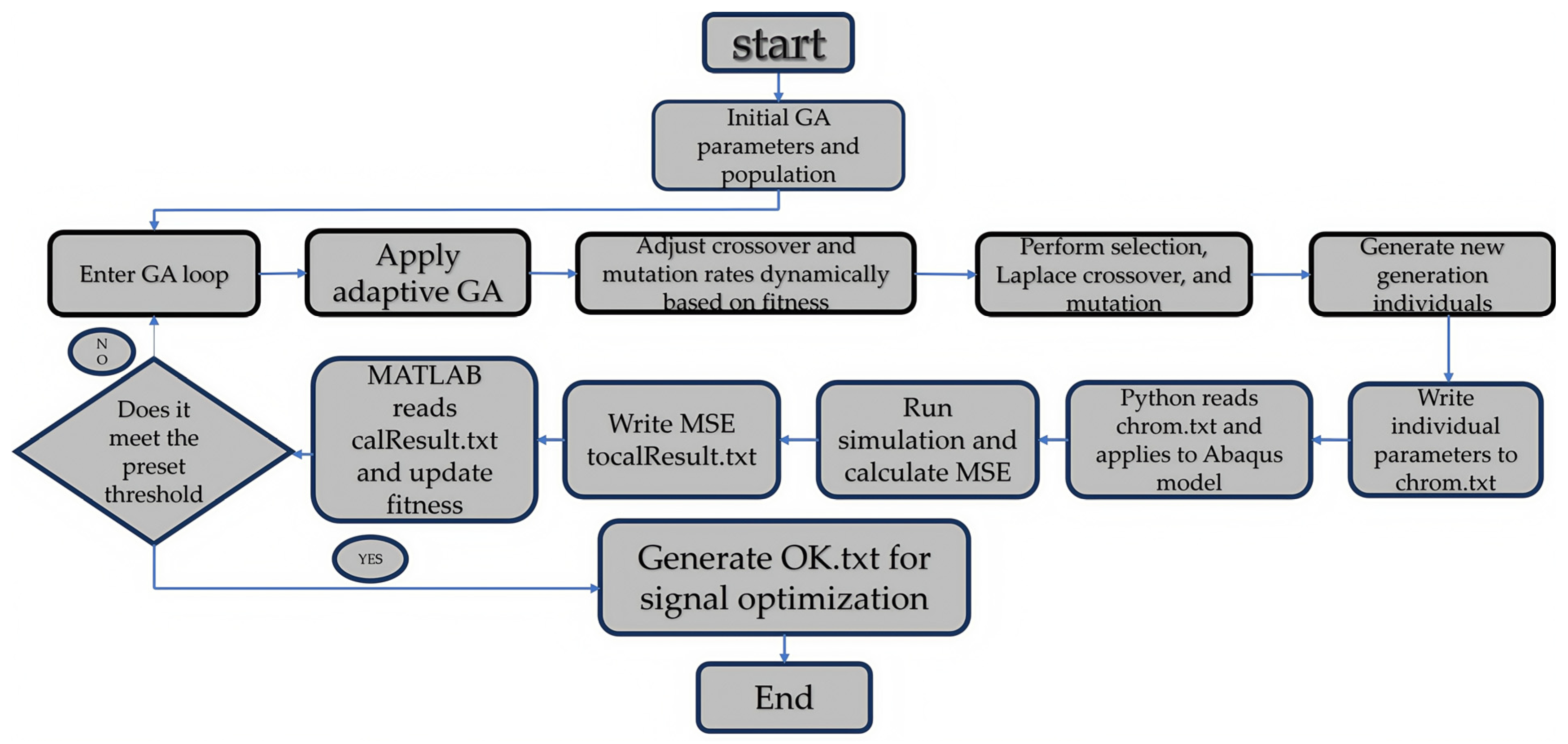
6.1. Joint Optimization Process
6.2. Application for Proposed Procedures
6.3. Finite Element Mesh Size Sensitivity Analysis
7. Parameter Inversion of the Measured Curve
8. Conclusions
- (1)
- A collaborative optimization system integrating ABAQUS, Python, and MATLAB software was developed. In the context of self-test parameter inversion stability, parameter deviation did not exceed 5% of the preset value.
- (2)
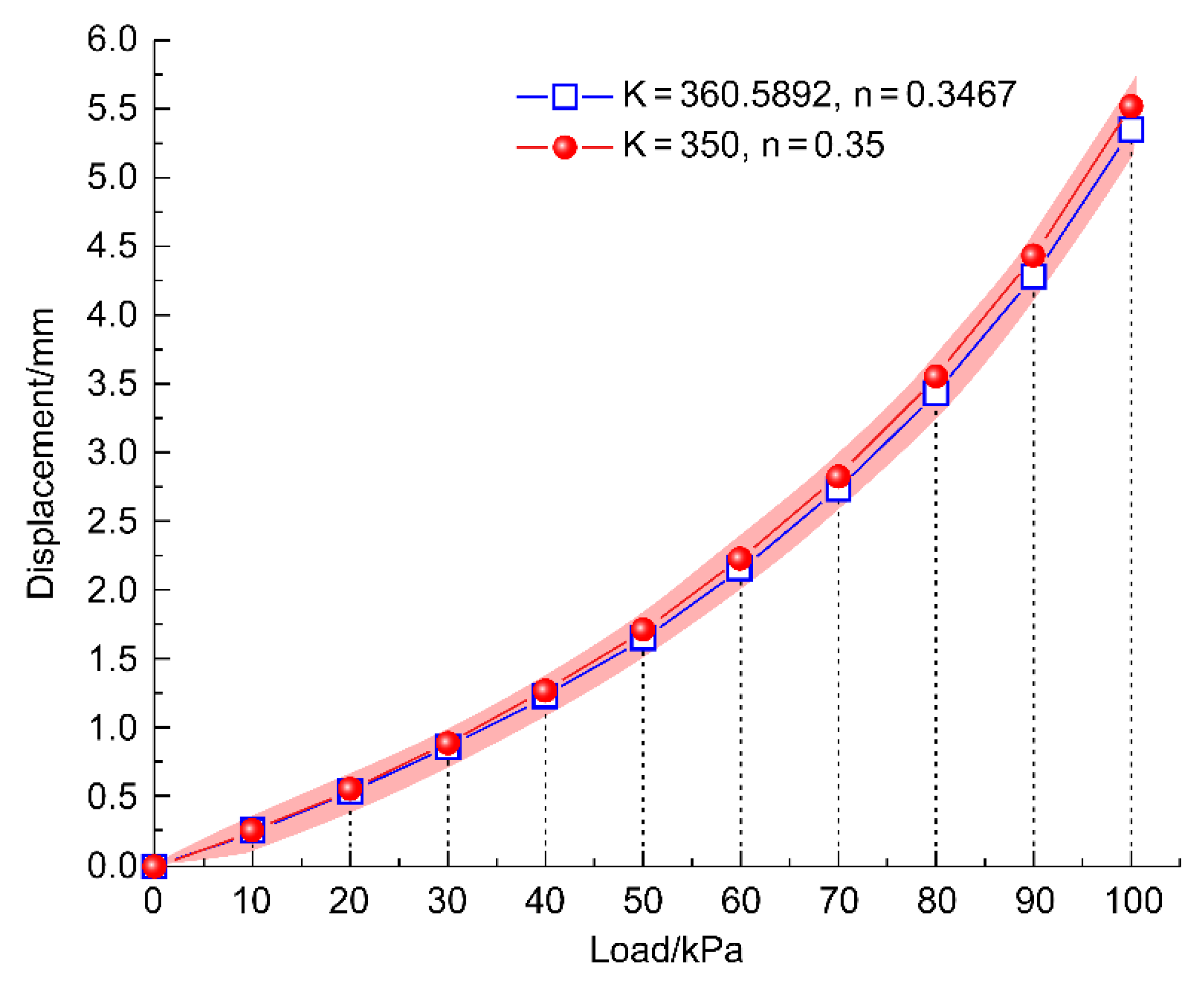
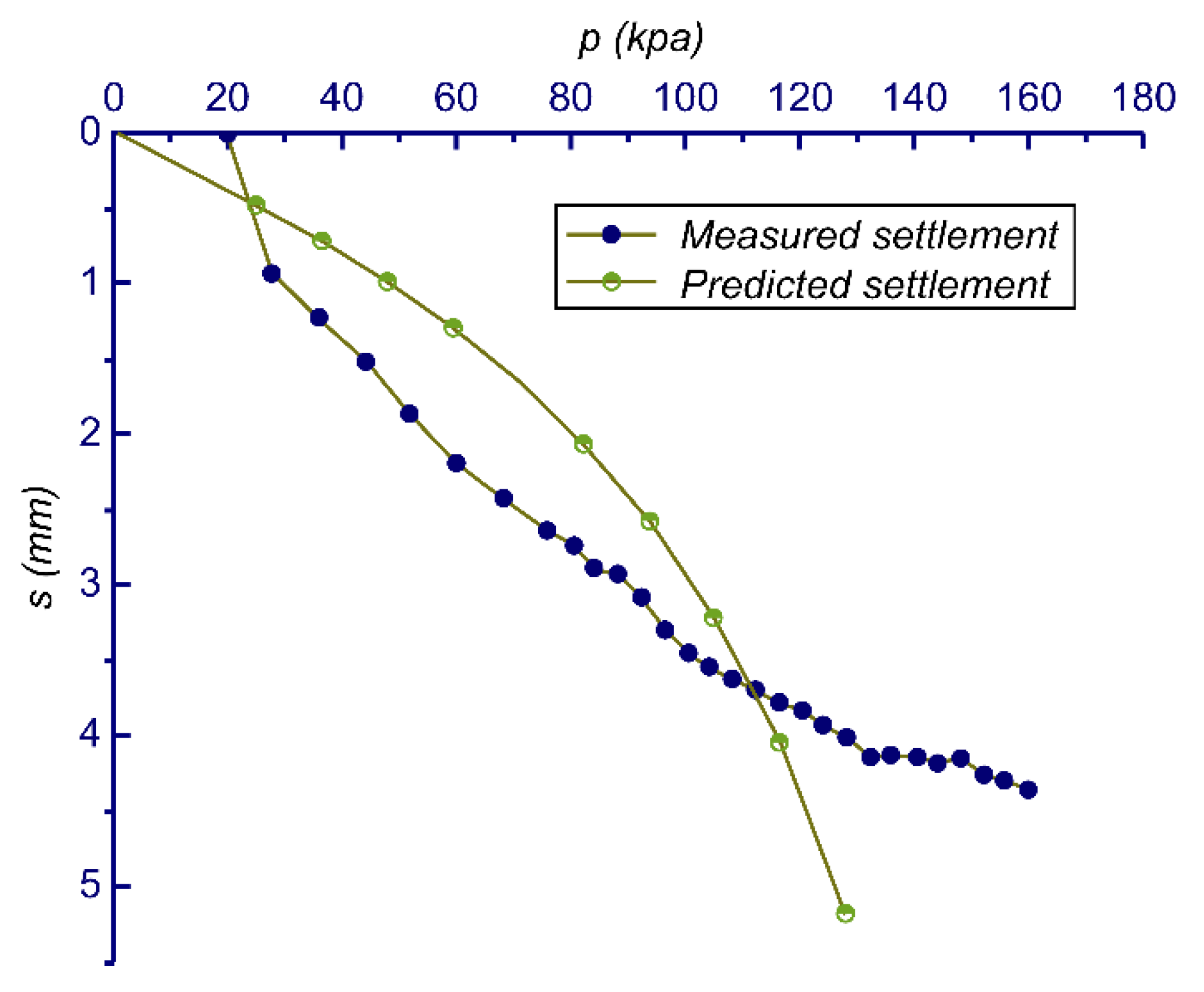
- The experimental configuration, incorporating a 0.5 m × 0.5 m loading plate and inductive sensors, was used to generate pressure–settlement (p–s) curves. Through parameter inversion, the optimized DC model parameters were determined to be K = 401.40 and n = 0.55, with an MSE of 0.4773.
- (3)
- When the applied load exceeded 132 kPa, boundary effects significantly influenced the test results owing to local stress concentrations at the edges.
- (4)
- The DC constitutive model adopted herein characterizes the soil as a nonlinear model. Although the DC model can reasonably predict nonlinear elastic deformation, it inherently lacks accuracy in capturing complex plastic deformation or localized shear behaviors, exhibiting limitations under high-loading scenarios as the boundary effects intensify.
- (5)
- Such inherent locality constraints of the DC approach might pose challenges in accurately modeling more sophisticated engineering problems. In particular, with increasingly complex simulations in ABAQUS, computational demands will notably increase, implying the necessity for further improvements and refinements in future research.
- (6)
- The DC model exhibits good performance under the following conditions:The constitutive framework of the DC model is simple and its parameters are easy to calibrate; thus, it is widely applied in geotechnical engineering.When conducting parameter inversion based on load–settlement (p–s) curves from shallow plate load tests, the DC model can well represent the general characteristics and accurately reproduce the measured curves, effectively supporting engineering design under moderate-loading conditions without significant boundary effects.This study presents a practical procedure: prior to structural construction, data obtained from field loading tests are combined with optimization algorithms to identify nonlinear constitutive parameters of soils. These identified parameters then facilitate precise predictions of the actual foundation behaviors.For existing structural foundations, the method can rapidly invert soil constitutive parameters using a limited amount of plate loading test data, effectively predicting foundation settlement behaviors under extended loading scenarios.While assessing slope stability, the method combines inversion-derived parameters with numerical calculations to evaluate slope stability more precisely, thus supporting stability assessments of slopes in engineering practice.Regarding pavement design and subgrade assessments, the method facilitates the accurate prediction of deformation responses under traffic loading through parameter inversion, ensuring reliable engineering designs of transportation infrastructure founded on homogeneous soils.For cohesive soil regions, inversion results can guide adjustments of the supporting structure stiffness, helping avoid excessive settlement.
- (7)
- The proposed method has the following limitations:
- (8)
- If the DC constitutive model is replaced with more complex elastoplastic models, such as the modified Cam–Clay model, in future research, the increased number of parameters and computational complexity will present challenges. Further algorithmic improvements and refinements are thus necessary.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DC model | Duncan–Chang model |
| UMAT | user material |
| FEM | finite element model |
| AGA | adaptive genetic algorithm |
| MSE | mean squared error |
Appendix A
Appendix B
- (1)
- Encoding: A chromosome represents the solution to the problem and is composed of multiple genes (variables), which are usually encoded in binary form.
- (2)
- Fitness function: The quality of each chromosome is evaluated.
- (3)
- Selection: Chromosomes are selected for crossover and mutation based on their fitness. Common selection methods include roulette wheel and tournament.
- (4)
- Crossover: New individuals are generated by exchanging chromosomal segments. The crossover rate is usually adaptive.
- (5)
- Mutation: Certain genes are randomly changed in the chromosome. The mutation rate is also adaptive.
- (6)
- Adaptive mechanism: The crossover and mutation rates are adjusted based on individual fitness, enabling the algorithm to possess varying search capabilities at different evolutionary stages.
- (7)
- Execute Laplace crossover: Laplace crossover is introduced in the AGA operation [32]. For each selected pair of parent individuals, and , Laplace crossover is performed with probability . A random number r, typically between 0 and 1, is generated. If r , Laplace crossover is performed; otherwise, the parent individuals are retained:where L is a random variable generated from the Laplace distribution [33]. The Laplace distribution is a symmetric probability distribution with a higher central peak and heavier tail.where b is a scale parameter that controls the width of the distribution.
- (8)
- Calculate fitness value: The mean squared error (MSE) function is defined for a given true value y and predicted value :where and represent the true and predicted values, respectively, for the i-th sample point in the calculated settlement.
- (9)
- Record and output the results, and document the optimal solution for each generation. The optimization is terminated if the objective function value is less than the set threshold of .
References
- Anderson, J.B.; Townsend, F.C.; Rahelison, L. Load testing and settlement prediction of shallow foundation. J. Geotech. Geoenviron. Eng. 2007, 133, 1494–1502. [Google Scholar] [CrossRef]
- Coduto, D.P.; Kitch, W.A.; Yeung, M.R. Foundation Design: Principles and Practices, 3rd ed.; Pearson: Boston, MA, USA, 2016; ISBN 978-0-13-341189-8. [Google Scholar]
- GB 50007-2011; Code for Design of Building Foundation. Architecture & Building Press: Beijing, China, 2011.
- Bray, J.D.; Macedo, J. 6th Ishihara Lecture: Simplified Procedure for Estimating Liquefaction-Induced Building Settlement. Soil Dyn. Earthq. Eng. 2017, 102, 215–231. [Google Scholar] [CrossRef]
- Cho, G.-C.; Dodds, J.; Santamarina, J.C. Particle shape effects on packing density, stiffness, and strength: Natural and crushed sands. J. Geotech. Geoenviron. Eng. 2006, 132, 591–602. [Google Scholar] [CrossRef]
- Chang, C.S.; Duncan, J.M. Consolidation analysis for partly saturated clay by using an elastic–plastic effective stress–strain model. Int. J. Numer. Anal. Methods Geomech. 1983, 7, 39–55. [Google Scholar] [CrossRef]
- Chen, C.L.; Shao, S.J.; Ma, L. Duncan-Chang nonlinear elastic model considered loess structure. Appl. Mech. Mater. 2011, 90–93, 176–181. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, Y.; Liu, X.; Wei, X. A unified monotonic model for sand based on modified hyperbolic equation and state-dependent dilatancy. Comput. Geotech. 2020, 128, 103788. [Google Scholar] [CrossRef]
- Dong, W.; Hu, L.; Yu, Y.Z.; Lv, H. Comparison between Duncan and Chang’s EB model and the generalized plasticity model in the analysis of a high earth-rockfill dam. J. Appl. Math. 2013, 2013, 709430. [Google Scholar] [CrossRef]
- Dong, L.; Wu, N.; Zhang, Y.; Liao, H.; Hu, G.; Li, Y. Improved Duncan-Chang model for reconstituted hydrate-bearing clayey silt from the South China Sea. Adv. Geo-Energy Res. 2023, 8, 136–140. [Google Scholar] [CrossRef]
- Cai, X.; Zhang, Y.; Guo, X.; Liu, Q.; Zhang, X.; Xie, X. Functional zoning optimization design of cemented sand and gravel dam based on modified Duncan-Chang nonlinear elastic model. Case Stud. Constr. Mater. 2022, 17, e01511. [Google Scholar] [CrossRef]
- Wang, W.; He, P.; Zhao, B.; Hu, A.; Shang, J. Application of Duncan-Chang model on the numerical analysis considering the clay heterogeneity. In Proceedings of GeoShanghai 2018 International Conference: Fundamentals of Soil Behaviours; Zhou, A., Tao, J., Gu, X., Hu, L., Eds.; Springer: Singapore, 2018; pp. 929–937. [Google Scholar]
- Dai, Z.P.; Zhao, C.; Zhao, C.F. The development and implementation of improved Duncan-Chang constitutive model in ABAQUS. Appl. Mech. Mater. 2011, 99–100, 965–971. [Google Scholar] [CrossRef]
- Guan, Q.Z.; Yang, Z.X.; Guo, N.; Hu, Z. Finite element geotechnical analysis incorporating deep learning-based soil model. Comput. Geotech. 2023, 154, 105120. [Google Scholar] [CrossRef]
- Wan, J.; Jiang, S.; Li, X.; Chang, Z. Development of improved finite element formulations for pile group behavior analysis under cyclic loading. Int. J. Numer. Anal. Methods Geomech. 2024, 48, 4089–4109. [Google Scholar] [CrossRef]
- Ghorbani, J.; Aghdasi, S.; Nazem, M.; McCartney, J.S.; Kodikara, J. Parameters in play: AlphaZero-inspired AI for autonomous parameter identification in soil constitutive and finite element models. Comput. Geotech. 2024, 174, 106657. [Google Scholar] [CrossRef]
- Erayman, E.; Yildiz, M.; Çavuş, U.Ş.; Yildiz, A. Finite element solution of dim dam under static loading using Duncan–Chang modelling. Online J. Sci. Technol. 2016, 6, 42–48. [Google Scholar]
- MolaAbasi, H.; Saberian, M.; Khajeh, A.; Li, J.; Jamshidi Chenari, R. Settlement predictions of shallow foundations for non-cohesive soils based on CPT records-polynomial model. Comput. Geotech. 2020, 128, 103811. [Google Scholar] [CrossRef]
- Fattahi, H.; Ghaedi, H. Improving accuracy in shallow foundation settlement prediction using rock engineering system method. Indian Geotech. J. 2024. [Google Scholar] [CrossRef]
- Hu, A.-F.; Xie, S.-L.; Li, T.; Xiao, Z.-R.; Chen, Y.; Chen, Y.-Y. Soil parameter inversion modeling using deep learning algorithms and its application to settlement prediction: A comparative study. Acta Geotech. 2023, 18, 5597–5618. [Google Scholar] [CrossRef]
- Singh, A.; Mitchell, J.K. General stress-strain-time function for soils. J. Soil Mech. Found. Div. 1968, 94, 21–46. [Google Scholar] [CrossRef]
- Asgarkhani, N.; Kazemi, F.; Jankowski, R. Machine learning-based prediction of residual drift and seismic risk assessment of steel moment-resisting frames considering soil-structure interaction. Comput. Struct. 2023, 289, 107181. [Google Scholar] [CrossRef]
- He, B.-H.; Du, X.-L.; Bai, M.-Z.; Yang, J.-W.; Ma, D. Inverse analysis of geotechnical parameters using an improved version of non-dominated sorting genetic algorithm II. Comput. Geotech. 2024, 171, 106416. [Google Scholar] [CrossRef]
- ISO 22477-2:2015; Geotechnical Investigation and Testing—Field Testing—Part 2: Static Load Testing of Piles. International Organization for Standardization: Geneva, Switzerland, 2015.
- Ji, Y.; Zuo, S.; Zhang, J.; Zhang, Y. Modified Duncan-Chang Model and Mechanics Parameter Determination Based on Triaxial Consolidated Drained Tests of Guiyang Red Clay in China. In New Solutions for Challenges in Applications of New Materials and Geotechnical Issues; Wang, S., Xinbao, Y., Tefe, M., Eds.; Springer International Publishing: Hangzhou, China, 2019; pp. 1–17. [Google Scholar]
- Peng, W.; Wang, Q.; Liu, Y.; Sun, X.; Chen, Y.; Han, M. The influence of freeze-thaw cycles on the mechanical properties and parameters of the Duncan-chang constitutive model of remolded Saline Soil in Nong’an County, Jilin Province, Northeastern China. Appl. Sci. 2019, 9, 4941. [Google Scholar] [CrossRef]
- Yan, M.; Yan, R.; Yu, H. Strain-softening characteristics of hydrate-bearing sediments and modified Duncan–Chang Model. Adv. Mater. Sci. Eng. 2021, 2021, 2809370. [Google Scholar] [CrossRef]
- Tang, B.; Liu, T.; Zhou, B. Duncan–Chang E-υ Model Considering the thixotropy of clay in the Zhanjiang formation. Sustainability 2022, 14, 12258. [Google Scholar] [CrossRef]
- Lang, M.; Deng, C. Comparative Analysis of Duncan-Zhang E-ν and E-B Models. In Proceedings of the 2021 3rd International Academic Exchange Conference on Science and Technology Innovation (IAECST), Guangzhou, China, 10 December 2021; pp. 2008–2011. [Google Scholar]
- Ali, R.; Mounir, G.; Moncef, T. Adaptive probabilities of crossover and mutation in genetic algorithm for solving stochastic vehicle routing problem. Int. J. Adv. Intell. Paradig. 2016, 8, 318. [Google Scholar] [CrossRef]
- Liu, Y.; Zheng, Y. Plastic Mechanics of Geomaterial; Springer: Singapore, 2019. [Google Scholar]
- Deep, K.; Bansal, J.C. Optimization of Directional Overcurrent Relay Times Using Laplace Crossover Particle Swarm Optimization (LXPSO). In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 288–293. [Google Scholar] [CrossRef]
- Wang, G.; Yang, C.; Ma, X. A Novel Robust Nonlinear Kalman Filter Based on Multivariate Laplace Distribution. IEEE Trans. Circuits Sys. II Express Briefs 2021, 68, 2705–2709. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, C.; Xu, N.; Meng, J.; Chen, J. Integrated Optimization System for Geotechnical Parameter Inversion Using ABAQUS, Python, and MATLAB. Buildings 2025, 15, 1108. https://doi.org/10.3390/buildings15071108
Wan C, Xu N, Meng J, Chen J. Integrated Optimization System for Geotechnical Parameter Inversion Using ABAQUS, Python, and MATLAB. Buildings. 2025; 15(7):1108. https://doi.org/10.3390/buildings15071108
Chicago/Turabian StyleWan, Chengjie, Nianchun Xu, Jiangchao Meng, and Junning Chen. 2025. "Integrated Optimization System for Geotechnical Parameter Inversion Using ABAQUS, Python, and MATLAB" Buildings 15, no. 7: 1108. https://doi.org/10.3390/buildings15071108
APA StyleWan, C., Xu, N., Meng, J., & Chen, J. (2025). Integrated Optimization System for Geotechnical Parameter Inversion Using ABAQUS, Python, and MATLAB. Buildings, 15(7), 1108. https://doi.org/10.3390/buildings15071108