
Investigation of the Dynamics of a 2-DoF Actuation Unit Cell for a Cooperative Electrostatic Actuation System


Abstract
:1. Introduction
2. System Concept, Materials, and Methods
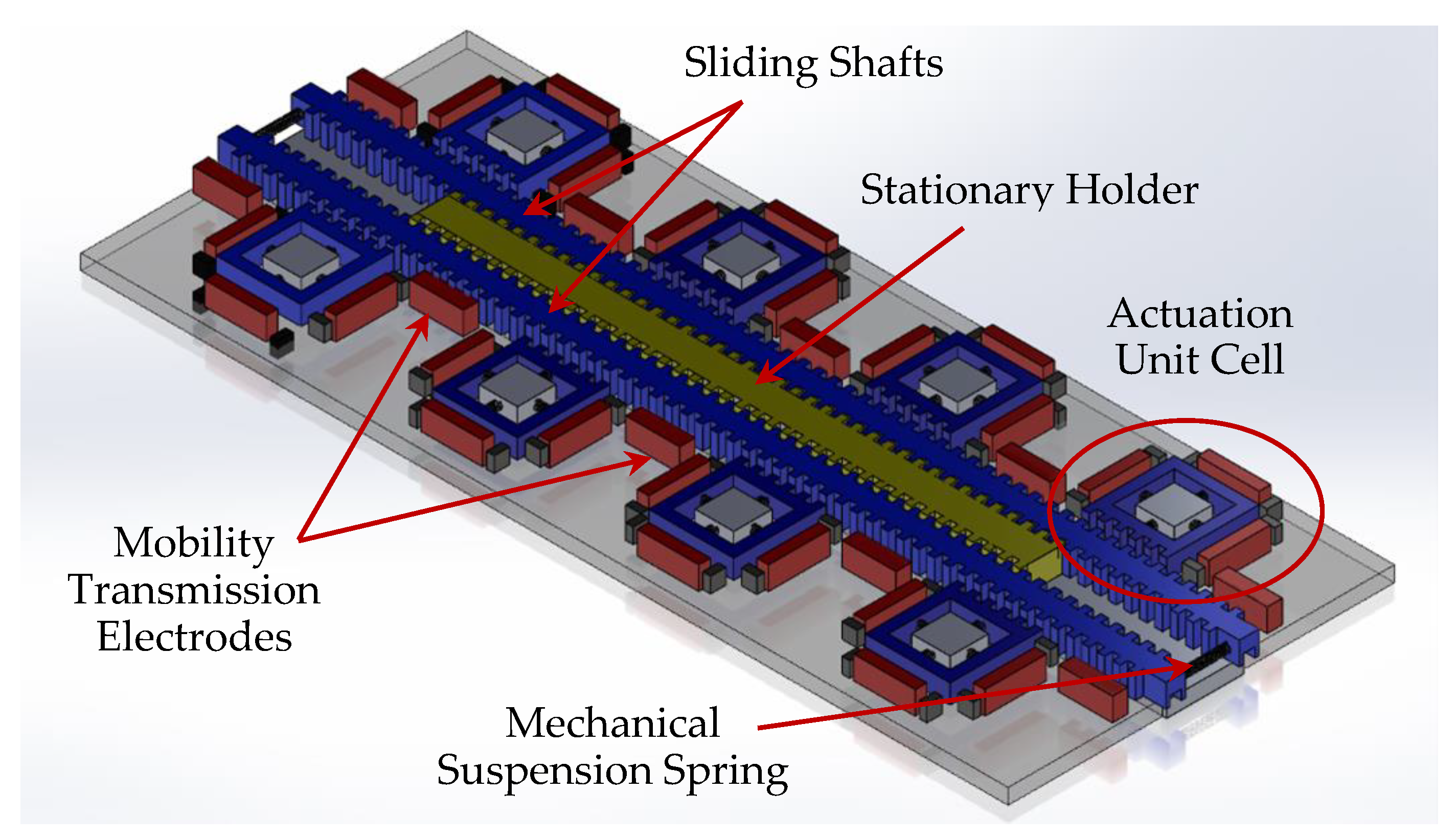
2.1. The Cooperative Concept and Actuation Unit Cell
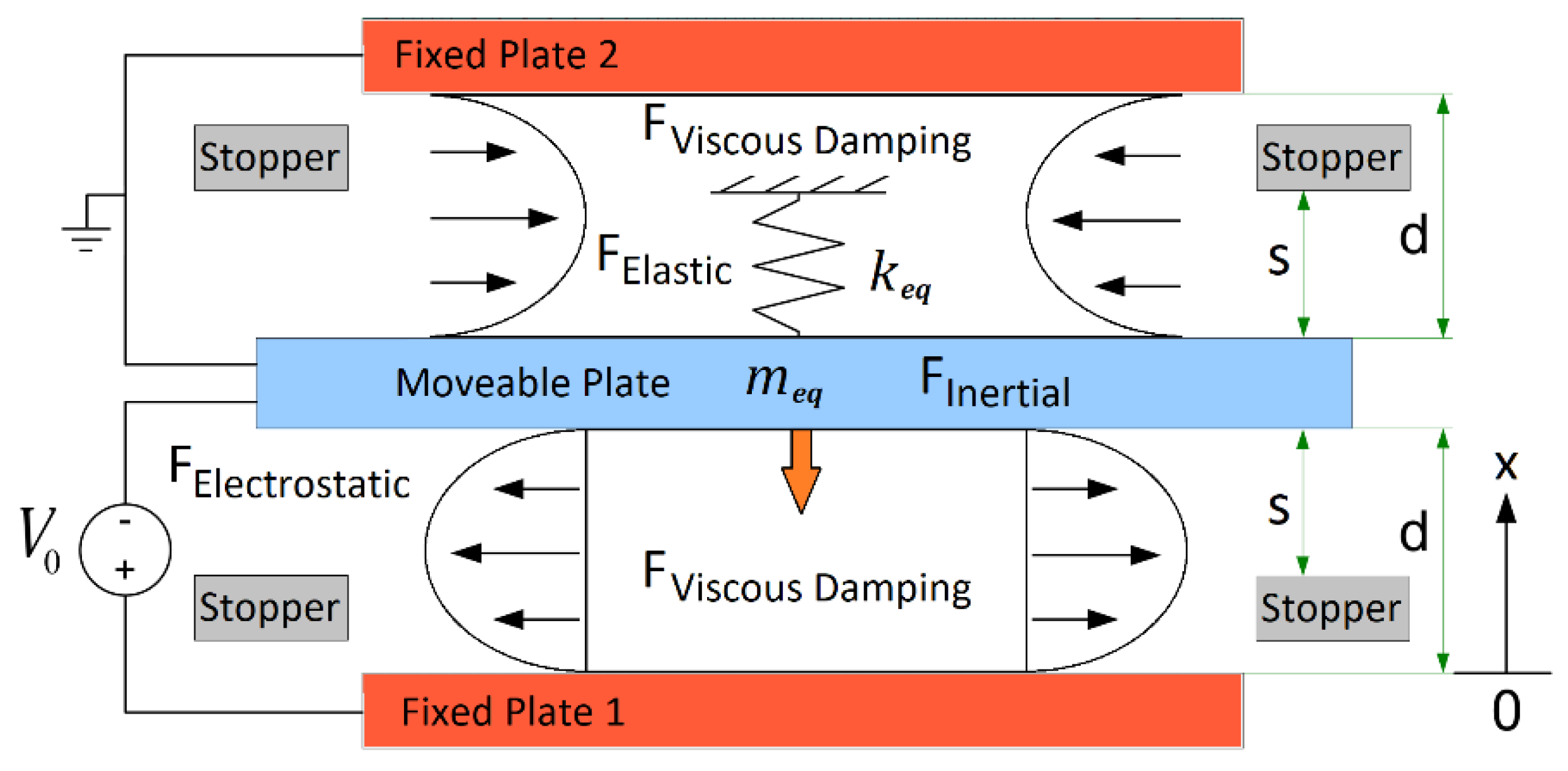
2.2. The Analytical Model of the AUC
2.3. FE Modeling and Simulation
2.3.1. Static Analysis
2.3.2. Transient Analysis
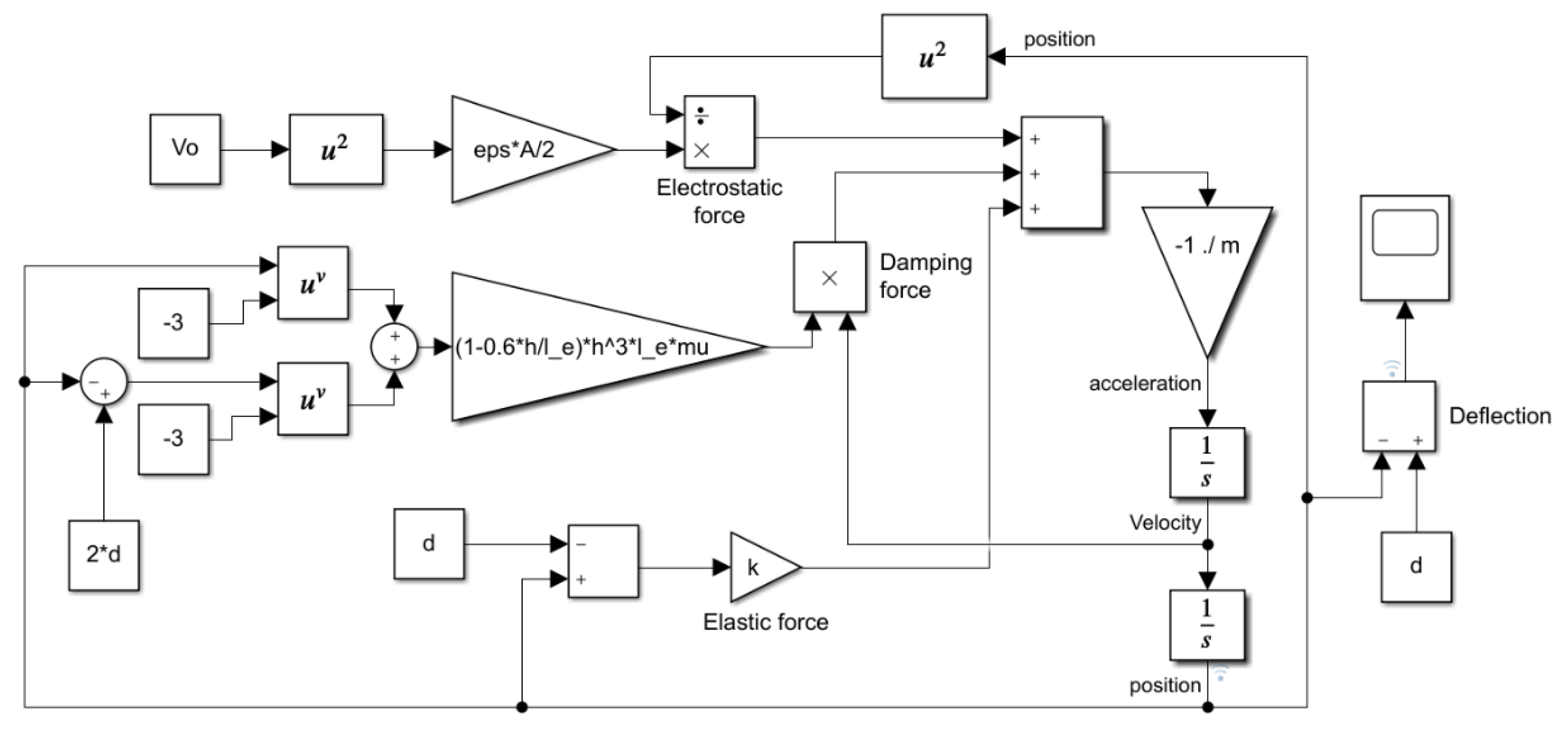
2.4. Solving the Analytical (Lumped-Parameter) Model by MATLAB/Simulink
3. Results
3.1. Pull-In Voltage
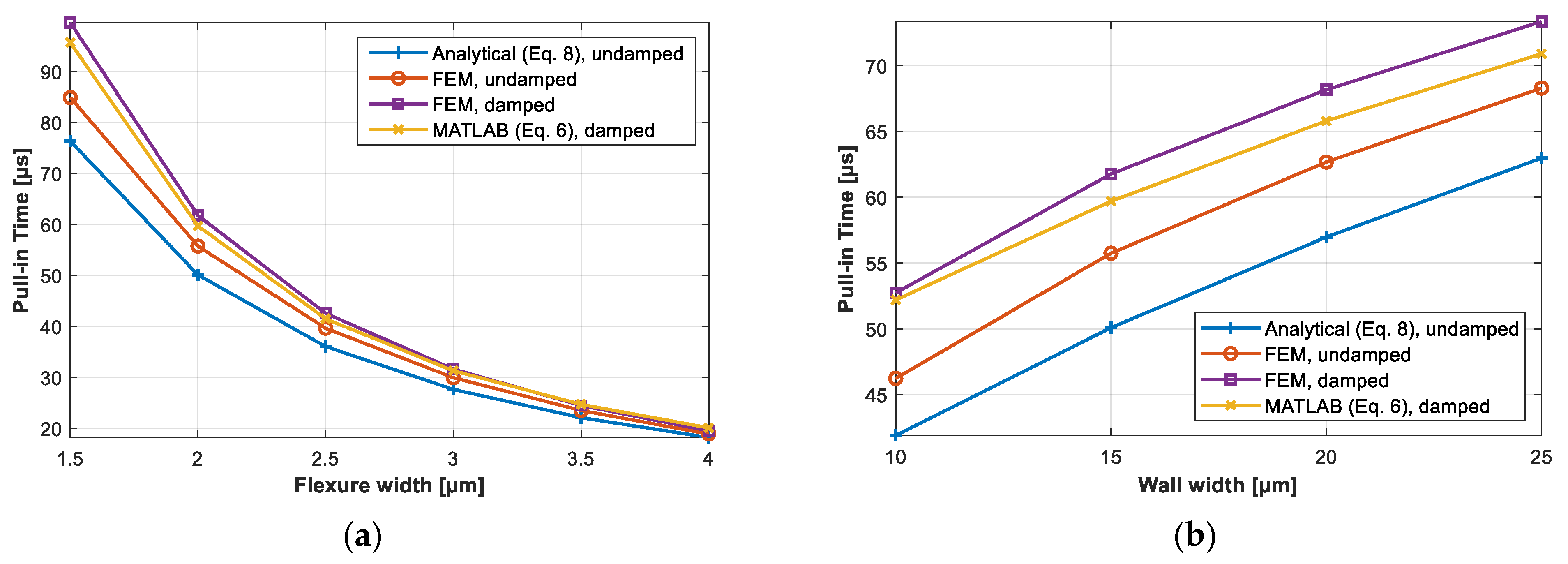
3.2. Pull-In Time
3.3. Pull-Out Time
4. Discussion
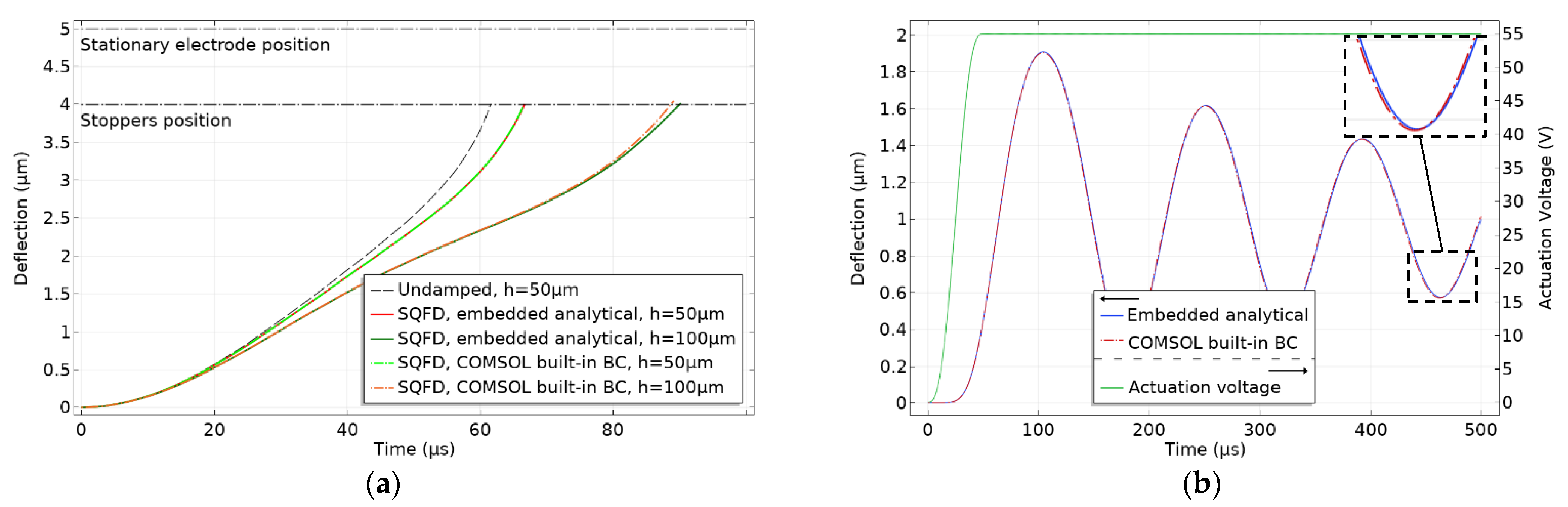
4.1. Dynamic Behavior
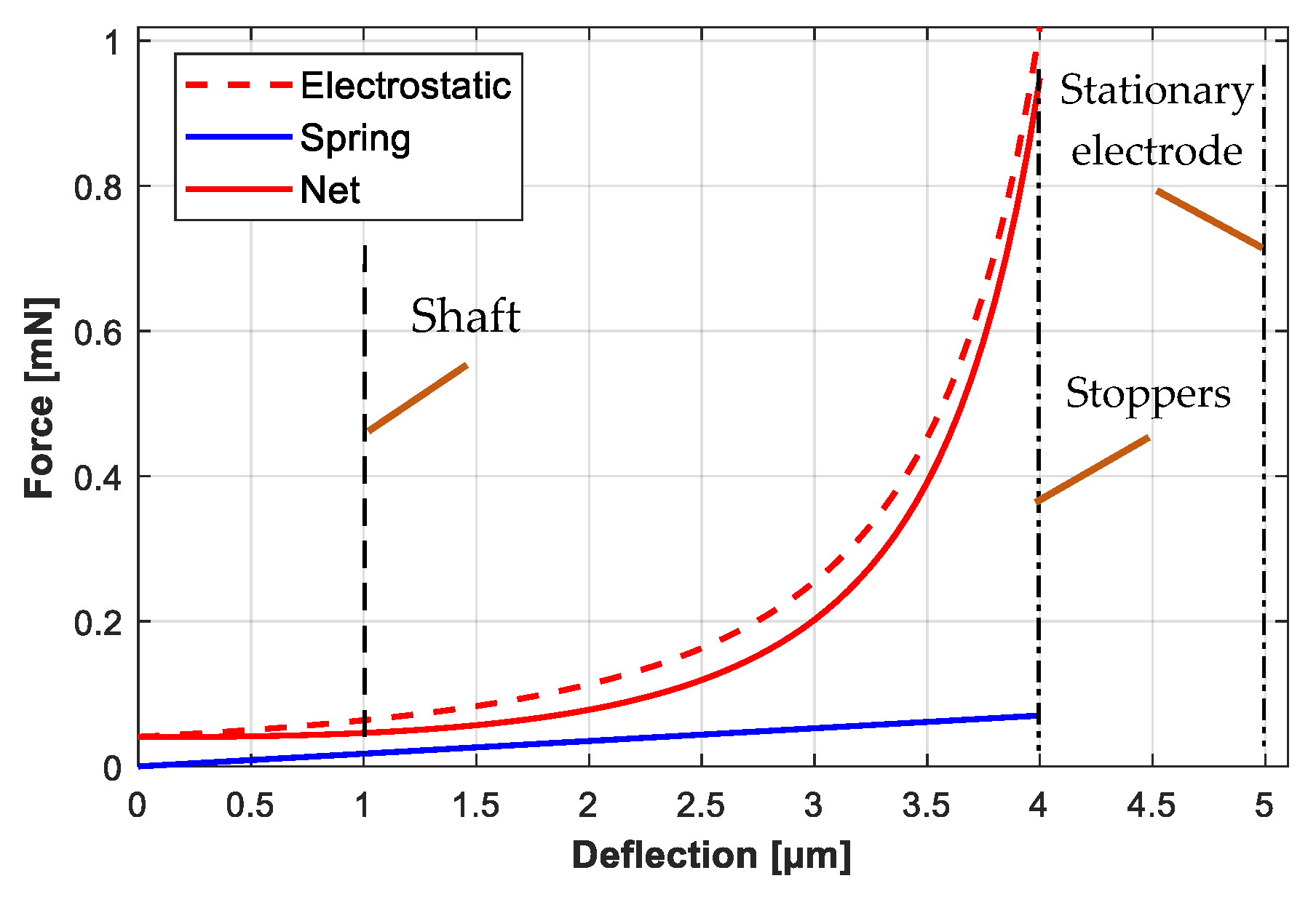
4.2. Output Force
4.3. Fabrication Feasibility Analysis
4.4. Error Estimation for the Used SQFD Modeling Approach in COMSOL
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Neul, R.; Gmez, U.-M.; Kehr, K.; Bauer, W.; Classen, J.; Dring, C.; Esch, E.; Gtz, S.; Hauer, J.; Kuhlmann, B.; et al. Micromachined Angular Rate Sensors for Automotive Applications. IEEE Sensors J. 2007, 7, 302–309. [Google Scholar] [CrossRef]
- Sampsell, J.B. Digital micromirror device and its application to projection displays. J. Vac. Sci. Technol. B 1994, 12, 3242. [Google Scholar] [CrossRef]
- Zhang, W.-M.; Meng, G.; Chen, D.I. Stability, Nonlinearity and Reliability of Electrostatically Actuated MEMS Devices. Sensors 2007, 7, 760–796. [Google Scholar] [CrossRef] [Green Version]
- Dochshanov, A.; Verotti, M.; Belfiore, N.P. A Comprehensive Survey on Microgrippers Design: Operational Strategy. J. Mech. Des. 2017, 139, 271. [Google Scholar] [CrossRef]
- Yeh, R.; Hollar, S.; Pister, K. Single mask, large force, and large displacement electrostatic linear inchworm motors. J. Microelectromech. Syst. 2002, 11, 330–336. [Google Scholar] [CrossRef]
- Kim, S.-H.; Hwang, I.-H.; Jo, K.-W.; Yoon, E.-S.; Lee, J.-H. High-resolution inchworm linear motor based on electrostatic twisting microactuators. J. Micromech. Microeng. 2005, 15, 1674–1682. [Google Scholar] [CrossRef]
- Erismis, M.A.; Neves, H.P.; Puers, R.; van Hoof, C. A Low-Voltage Large-Displacement Large-Force Inchworm Actuator. J. Microelectromech. Syst. 2008, 17, 1294–1301. [Google Scholar] [CrossRef]
- Penskiy, I.; Bergbreiter, S. Optimized electrostatic inchworm motors using a flexible driving arm. J. Micromech. Microeng. 2013, 23, 15018. [Google Scholar] [CrossRef]
- Contreras, D.S. Walking Silicon: Actuators and Legs for Small-Scale Terrestrial Robots. Ph.D. Dissertation, University of California, Berkeley, CA, USA, 2019. [Google Scholar]
- Teal, D.; Gomez, H.C.; Schindler, C.B.; Pister, K.S.J. Robust Electrostatic Inchworm Motors for Macroscopic Manipulation and Movement. In Proceedings of the 2021 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Orlando, FL, USA, 20–24 June 2021; pp. 635–638. [Google Scholar] [CrossRef]
- Xiang, X.; Dai, X.; Wang, K.; Yang, Z.; Sun, Y.; Ding, G. A Customized Nonlinear Micro-Flexure for Extending the Stable Travel Range of MEMS Electrostatic Actuator. J. Microelectromech. Syst. 2019, 28, 199–208. [Google Scholar] [CrossRef]
- Burns, D.M.; Bright, V.M. Nonlinear flexures for stable deflection of an electrostatically actuated micromirror. In Microelectronic Structures and MEMS for Optical Processing III, Proceedings of the Micromachining and Microfabrication, Austin, TX, USA, 29 September 1997; Motamedi, M.E., Herzig, H.P., Eds.; SPIE: Bellingham, WA, USA, 1997; Volume 3226, pp. 125–136. [Google Scholar] [CrossRef]
- Zhang, W.-M.; Yan, H.; Peng, Z.-K.; Meng, G. Electrostatic pull-in instability in MEMS/NEMS: A review. Sens. Actuators A Phys. 2014, 214, 187–218. [Google Scholar] [CrossRef]
- Younis, M.I. MEMS Linear and Nonlinear Statics and Dynamics; Springer US: Boston, MA, USA, 2011; ISBN 978-1-4419-6019-1. [Google Scholar]
- Ostasevicius, V.; Dauksevicius, R. Microsystems Dynamics; Springer: Dordrecht, The Netherlands, 2011; ISBN 978-90-481-9700-2. [Google Scholar]
- Kloub, H. Design Concepts of Multistage Multistable Cooperative Electrostatic Actuation System with Scalable Stroke and Large Force Capability. In Proceedings of the ACTUATOR; International Conference and Exhibition on New Actuator Systems and Applications 2021, Online, 17–19 February 2021; pp. 1–4. [Google Scholar]
- Teli, M.; Grava, G.; Solomon, V.; Andreoletti, G.; Grismondi, E.; Meswania, J. Measurement of forces generated during distraction of growing-rods in early onset scoliosis. World J. Orthop. 2012, 3, 15–19. [Google Scholar] [CrossRef] [PubMed]
- Bao, M.; Yang, H. Squeeze film air damping in MEMS. Sens. Actuators A Phys. 2007, 136, 3–27. [Google Scholar] [CrossRef]
- Andrews, M.; Harris, I.; Turner, G. A comparison of squeeze-film theory with measurements on a microstructure. Sens. Actuators A Phys. 1993, 36, 79–87. [Google Scholar] [CrossRef]
- Blech, J.J. On Isothermal Squeeze Films. J. Lubr. Technol. 1983, 105, 615–620. [Google Scholar] [CrossRef]
- Starr, J.B. Squeeze-film damping in solid-state accelerometers. In Proceedings of the IEEE 4th Technical Digest on Solid-State Sensor and Actuator Workshop, Hilton Head, SC, USA, 4–7 June 1990; pp. 44–47. [Google Scholar]
- Chu, P.B.; Nelson, P.R.; Tachiki, M.L.; Pister, K.S. Dynamics of polysilicon parallel-plate electrostatic actuators. Sens. Actuators A Phys. 1996, 52, 216–220. [Google Scholar] [CrossRef]
- Rebeiz, G.M. RF MEMS: Theory, Design, and Technology; Wiley InterScience: Hoboken, NJ, USA, 2003; ISBN 0-471-20169-3. [Google Scholar]
- Laermer, F.; Schilp, A. Method of Anisotropically Etching Silicon. U.S. Patent 5,501,893, 27 November 1993. [Google Scholar]
- Mescheder, U.; Nimo, A.; Müller, B.; Elkeir, A.S.A. Micro harvester using isotropic charging of electrets deposited on vertical sidewalls for conversion of 3D vibrational energy. Microsyst. Technol. 2012, 18, 931–943. [Google Scholar] [CrossRef]
- Freudenreich, M.; Mescheder, U.; Somogyi, G. Simulation and realization of a novel micromechanical bi-stable switch. Sens. Actuators A Phys. 2004, 114, 451–459. [Google Scholar] [CrossRef]
- Kronast, W.; Mescheder, U.; Müller, B.; Nimo, A.; Braxmaier, C.; Schuldt, T. Development of a tilt actuated micromirror for applications in laser interferometry. In MOEMS and Miniaturized Systems IX, Proceedings of the MOEMS-MEMS, San Francisco, CA, USA, 23 January 2010; Schenk, H., Piyawattanametha, W., Eds.; SPIE: Bellingham, WA, USA, 2010; Volume 7594, p. 75940O. [Google Scholar] [CrossRef]
- de Zwart, G.; van den Brink, M.A.; George, R.A.; Satriasaputra, D.; Baselmans, J.; Butler, H.; van Schoot, J.B.; de Klerk, J. Performance of a step-and-scan system for DUV lithography. In Optical Microlithography X. Proceedings of Microlithography ’97, Santa Clara, CA, USA, 10 March 1997; Fuller, G.E., Ed.; SPIE: Bellingham, WA, USA, 1997; Volume 3051, p. 817. [Google Scholar] [CrossRef]
- Fedder, G.K. Simulation of Microelectromechanical Systems. Ph.D. Dissertation, University of California, Berkeley, CA, USA, 1994. [Google Scholar]
- Lobontiu, N.; Garcia, E. Mechanics of Microelectromechanical Systems; Kluwer Academic: Boston, MA, USA, 2005; ISBN 0-387-23037-8. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value | Unit |
|---|---|---|---|
| Height of unit cell | h | 50 | µm |
| Width of cell wall | ww | 15 | µm |
| Size of cell wall along x-axis (inner dimension) | cx | 500 | µm |
| Size of cell wall along y-axis (inner dimension) | cy | 500 | µm |
| Size of anchor (x-axis) | ax | 100 | µm |
| Size of anchor (y-axis) | ay | 100 | µm |
| Width of x-axis spring (flexure width) | wx | 2 | µm |
| Width of y-axis spring (flexure width) | wy | 2 | µm |
| Length of connector beams of x-axis spring | lc,x | 50 | µm |
| Length of span beam of x-axis spring | ls,x | 200 | µm |
| Length of extension beams of x-axis spring | le,x | 53 | µm |
| Length of connector beams of y-axis spring | lc,y | 50 | µm |
| Length of span beam of y-axis spring | ls,y | 200 | µm |
| Length of extension beams of y-axis spring | le,y | 53 | µm |
| Length of stationary electrodes | le | 460 | µm |
| Width of stopper (length of contact area) | ws | 25 | µm |
| Nominal air gap between electrodes | d | 5 | µm |
| Stroke (distance between mov. electrode at rest and stopper) | s | 4 | µm |
| Young’s modulus | E | 170 | GPa |
| Poisson’s ratio | ν | 0.28 | - |
| Density (c-Si) | ρ | 2329 | kg/m3 |
| Air viscosity | µ | 1.845 × 10−5 | Pa.s |
| Actuation Voltage | Vo | variable | V |
| Description | Symbol | Device 1 | Device 2 | Unit |
|---|---|---|---|---|
| Height of unit cell | h | 50 | 100 | µm |
| Width of cell wall | ww | 25 | 35 | µm |
| Size of cell wall (inner) | cx and cy | 500 | 600 | µm |
| Size of anchor | ax and ay | 100 | 100 | µm |
| Width of spring (flexure width) | wx and wy | 2.5 | 5 | µm |
| Length of connector beams | lc,x and lc,y | 50 | 50 | µm |
| Length of span beams | ls,x and ls,y | 200 | 300 | µm |
| Length of extension beams | le,x and le,y | 53 | 82.5 | µm |
| Length of stationary electrodes | le | 480 | 600 | µm |
| Width of stopper | ws | 25 | 25 | µm |
| Nominal air gap between electrodes | d | 5 | 4 | µm |
| Stroke | s | 4 | 3 | µm |
| Equivalent mass (assuming r = 0.5) | meq | 6.46 | 22.65 | µg |
| Equivalent spring constant 1 | keq | 40.4 | 304.8 | N/m |
| Pull-in voltage 1 | Vpull-in | 83.9 | 104.3 | V |
| Collapse voltage (2nd pull-in) 1 | Vcollapse | 152.0 | 165.9 | V |
| Actuation voltage | Vo | 110 | 130 | V |
| Pull-in time (corresponding to Vo) 2 | tpull-in | 32.2 | 24.9 | µs |
| Net force of AUC (at 1µm) 2,3 | F | 0.04 | 0.19 | mN |
| Net force of AUC (at 2µm) 2,3 | F | 0.06 | 0.51 | mN |
| Realignment margin | δ | ±2 | ±1 | µm |
| Pull-out time (corresponding to δ) 2 | tpull-out | 283 | 91 | µs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Albukhari, A.; Mescheder, U. Investigation of the Dynamics of a 2-DoF Actuation Unit Cell for a Cooperative Electrostatic Actuation System. Actuators 2021, 10, 276. https://doi.org/10.3390/act10100276
Albukhari A, Mescheder U. Investigation of the Dynamics of a 2-DoF Actuation Unit Cell for a Cooperative Electrostatic Actuation System. Actuators. 2021; 10(10):276. https://doi.org/10.3390/act10100276
Chicago/Turabian StyleAlbukhari, Almothana, and Ulrich Mescheder. 2021. "Investigation of the Dynamics of a 2-DoF Actuation Unit Cell for a Cooperative Electrostatic Actuation System" Actuators 10, no. 10: 276. https://doi.org/10.3390/act10100276