
Model-Based Observer Design Considering Unequal Measurement Delays


Abstract
:1. Introduction
- Designing an observer by considering equal measurement delays.
- Designing a chain observer to deal with unequal measurement delays.
- Proving the convergence of each chain as well as the overall observer.
2. Preliminaries of Model-Based (Luenberger) Observer Design
C = WT + VC, Q = D − VD
G ∈ Rs × s, T ∈ Rs × n, W ∈ Rm × s
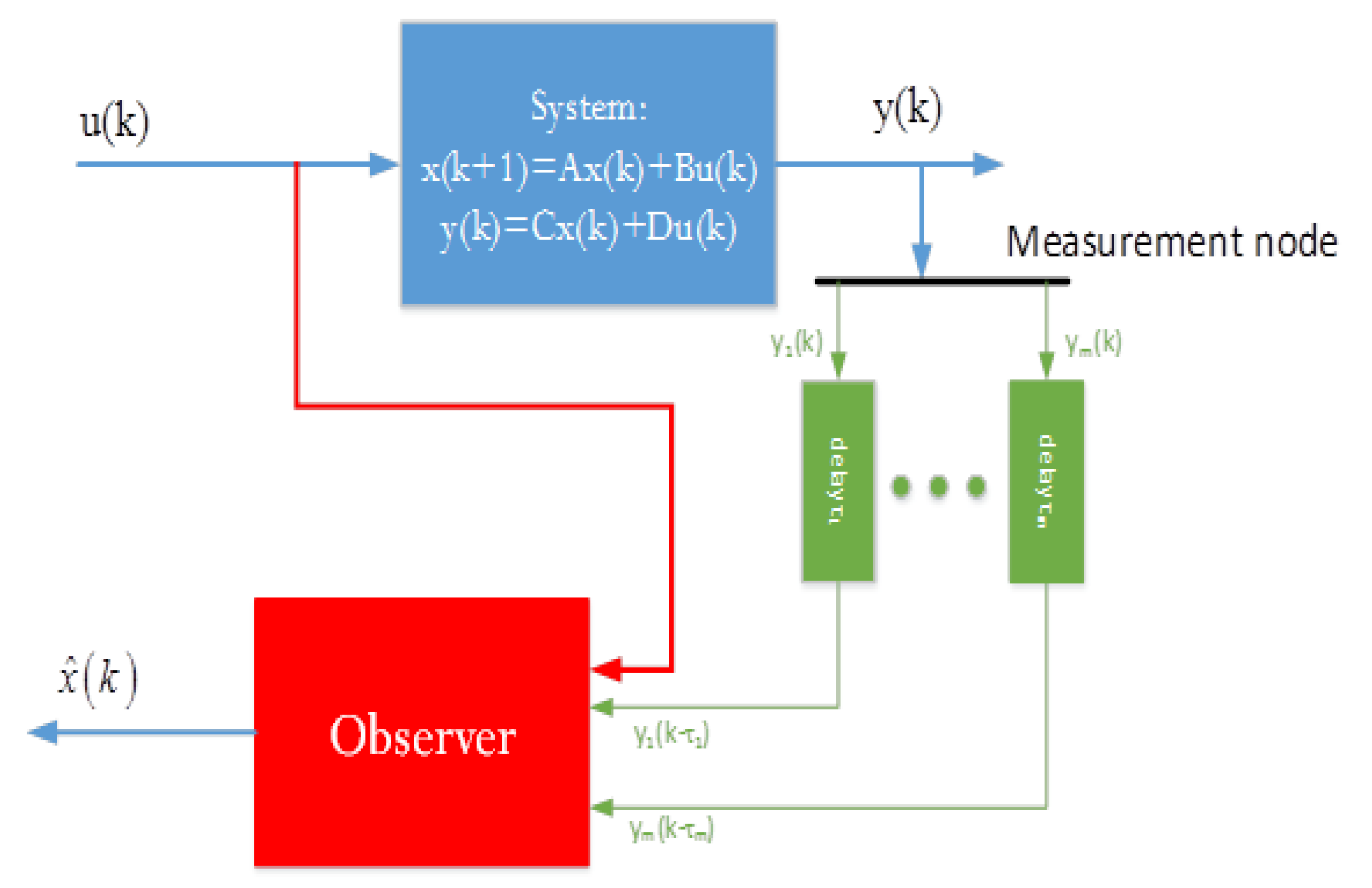
3. Problem Formulation
4. The Proposed Observer Design
4.1. Observer Design in the Case of Equal Measurement Delays
Qj = CAj−1B, j = 1,..., d
G ∈ Rs × s, T ∈ Rs × n
4.2. Observer Design in the Case of Unequal Delays
| Algorithm 1. Chain observer design algorithm |
| Step 1: set Step 2: Select a proper that satisfies stability conditions (29). Step 3: Design the chain-observer i using Theorem 1 with . Step 4: Produce the complementary output using available output and input, then estimate output data by Equation (27). Step 5: Go to step 2 and repeat till . |
5. Simulation
- By changing the observer poles, the convergence speed can be tuned.
- Each chain is an observer in the form of (6).
- Increasing the communication delays may increase the convergence time and transient estimation error magnitude, but according to theorem 3, it will not make the observer unstable.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Proof of Theorem 2
Appendix B. Proof of Theorem 3
References
- Boizota, N.; Busvelleb, E.; Gauthier, J.-P. An adaptive high-gain observer for nonlinear systems. Automatica 2010, 46, 1483–1488. [Google Scholar] [CrossRef]
- Youngjoo, K.; Bang, H. Introduction to Kalman filter and its applications. In Introduction and Implementations of the Kalman Filter; Govaers, F., Ed.; IntechOpen: Rijeka, Croatia, 2019. [Google Scholar]
- Spurgeon, S.K. Sliding mode observers: A survey. Int. J. Syst. Sci. 2008, 39, 751–764. [Google Scholar] [CrossRef]
- Regaieg, M.A.; Kchaou, M.; Bosche, J.; El-Hajjaji, A.; Chaabane, M. Robust dissipative observer-based control design for discrete-time switched systems with time-varying delay. IET Control Theory Appl. 2019, 13, 3026–3039. [Google Scholar] [CrossRef]
- Kchaou, M.; Al Ahmadi, S. Robust control for nonlinear uncertain switched descriptor systems with time delay and nonlinear input: A sliding mode approach. Complexity 2017, 2017, 1027909. [Google Scholar] [CrossRef] [Green Version]
- Karafyllis, I.; Malisoff, M.; Mazenc, F.; Pepe, P. Recent Results on Nonlinear Delay Control Systems; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Nagmani, G.; Karthik, C.; Rajan, G.S. Observer-Based Exponential Stabilization for Time-Delay Systems via Augmented Weighted Integral Inequality. J. Frankl. Inst. 2019, 356, 9023–9042. [Google Scholar] [CrossRef]
- Gnaneswaran, N.; Joo, Y.H.; Kim, H.S. A linear matrix inequality-based extended dissipativity criteria for linear systems with additive time-varying delays. IFAC J. Syst. Control 2019, 10, 100070. [Google Scholar] [CrossRef]
- Won, J.K. An Observer for State Estimation in the Presence of Multiple Measurement Delays. Master’s Thesis, California State University, Long Beach, CA, USA, 2019. [Google Scholar]
- Olbrot, A. Observability and observers for a class of linear systems with delays. IEEE Trans. Autom. Control 1981, 26, 513–517. [Google Scholar] [CrossRef]
- Zheng, G.; Bejarano, F.J. Observer design for linear singular time-delay systems. Automatica 2017, 80, 1–9. [Google Scholar] [CrossRef]
- Sanz, R.; Garcia, P.; Krstic, M. Observation and stabilization of LTV systems with time-varying measurement delay. Automatica 2019, 103, 573–579. [Google Scholar] [CrossRef]
- Cacace, F.; Germani, A.; Manes, C. A chain observer for nonlinear systems with multiple time-varying measurement delays. SIAM J. Control Optim. 2014, 52, 1862–1885. [Google Scholar] [CrossRef]
- Subbarao, K.; Muralidhar, P.C. A state observer for lti systems with delayed outputs: Time-varying delay. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008. [Google Scholar]
- Cao, Y.Y.; Sun, Y.X.; Cheng, C. Delay-dependent robust stabilization of uncertain systems with multiple state delays. IEEE Trans. Autom. Control 1998, 43, 1608–1612. [Google Scholar]
- Ding, S.X. Data-Driven Design of Fault Diagnosis and Fault-Tolerant Control Systems; Springer: London, UK, 2014. [Google Scholar]
- Ding, S.X.; Yin, S.; Wang, Y.; Wang, Y.; Yang, Y.; Ni, B. Data-driven design of observers and its applications. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August–2 September 2011. [Google Scholar]
- Germani, A.; Manes, C.; Pepe, P. State observation of nonlinear systems with delayed output measurements. In Proceedings of the 2nd IFAC Workshop on Time Delay Systems, Ancona, Italy, 11–13 September 2000; pp. 58–63. [Google Scholar]
- Kahelras, M.; Ahmed-Ali, T.; Giri, F.; Lamnabhi-Lagarrigue, F. Sampled-Data Chain-Observer Design for a Class of Delayed Nonlinear Systems. Int. J. Control 2018, 91, 1076–1090. [Google Scholar] [CrossRef]
- Stojanovic, S.B.; Debeljkovic, D.L. On the asymptotic stability of linear discrete time delay systems. Eng. Syst. Des. Anal. 2004, 41731, 805–811. [Google Scholar]
- Dinh Cong, H. A fresh approach to the design of observers for time-delay systems. Trans. Inst. Meas. Control 2018, 40, 477–503. [Google Scholar]
- Callebaut, D. Generalization of the Cauchy-Schwarz inequality. J. Math. Anal. Appl. 1965, 12, 491–494. [Google Scholar] [CrossRef]
- Meyer, C.D. Matrix Analysis and Applied Linear Algebra; Siam: Philadelphia, PA, USA, 2000; Volume 71. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Unit |
|---|---|---|
| VT | Water volume in the tank | L |
| HT | Enthalpy in the tank | J |
| Thj | Temperature in the heating jacket | °C |
| Water flows in and out of the tank | 1/s | |
| Ph | Electrical heater power | W |
| hT | Water level in the tank | m |
| TT | Water temperature in the tank | °C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alipouri, Y.; Zhong, L. Model-Based Observer Design Considering Unequal Measurement Delays. Actuators 2021, 10, 281. https://doi.org/10.3390/act10110281
Alipouri Y, Zhong L. Model-Based Observer Design Considering Unequal Measurement Delays. Actuators. 2021; 10(11):281. https://doi.org/10.3390/act10110281
Chicago/Turabian StyleAlipouri, Yousef, and Lexuan Zhong. 2021. "Model-Based Observer Design Considering Unequal Measurement Delays" Actuators 10, no. 11: 281. https://doi.org/10.3390/act10110281