
An Adaptive Model Predictive Control System for Virtual Coupling in Metros


Abstract
:1. Introduction
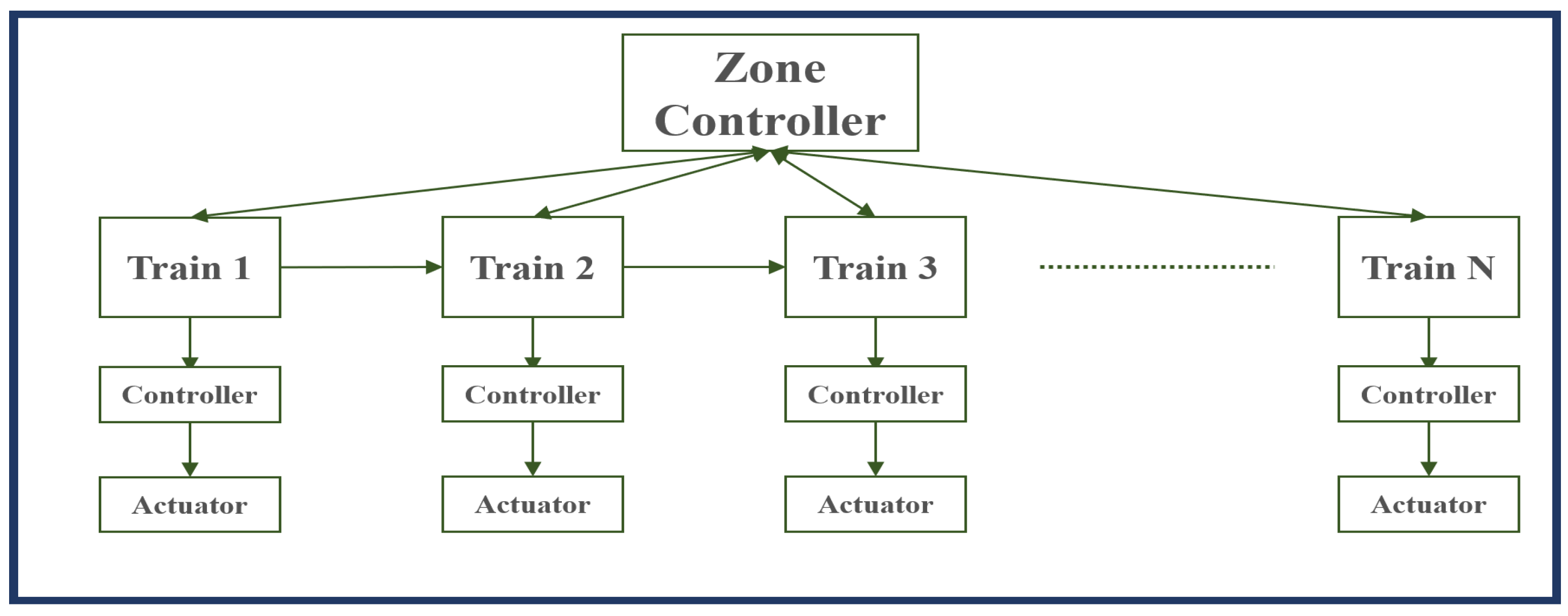
- A serial distributed control system structure is proposed for trains in VC, according to the metro infrastructures and their communication architectures, where each train has a local controller and each controller communicates with its neighbor trains. Based on the control structure, a distributed AMPC system is proposed to make successive trains driving with a desired distance;
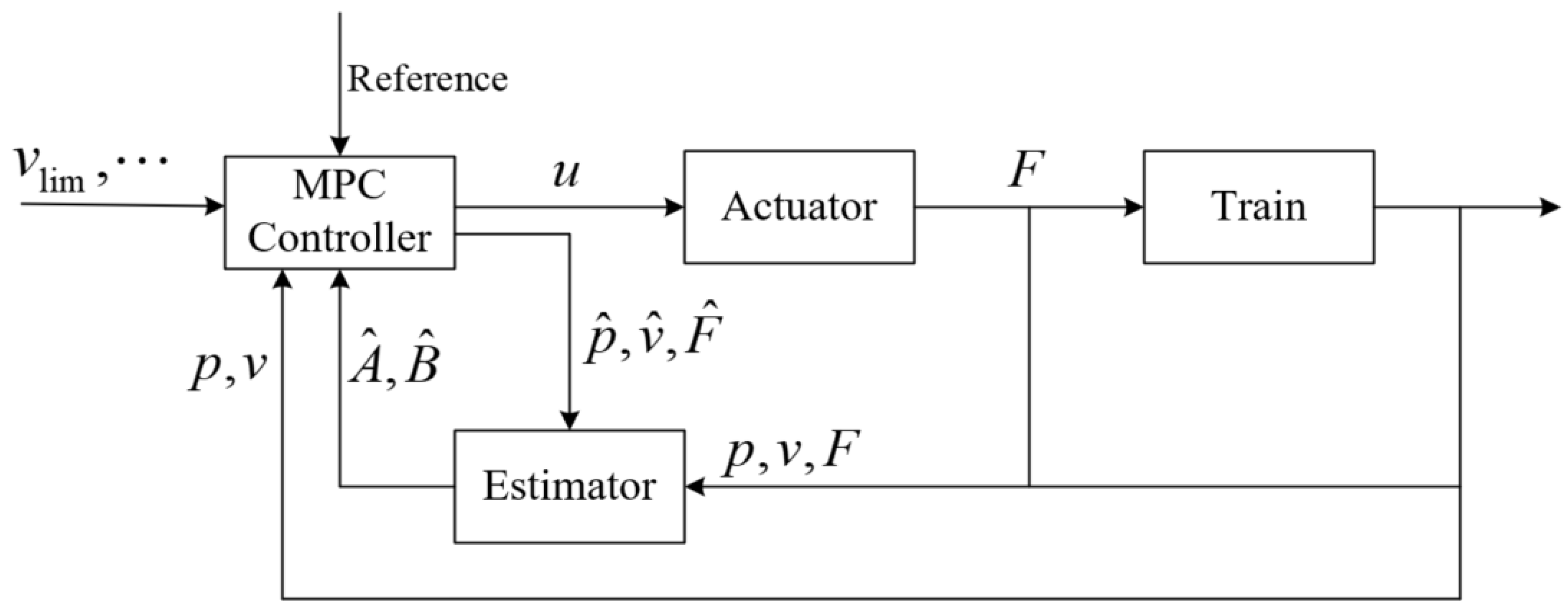
- An estimator is designed for each local controller in the distributed AMPC system, to reduce the value errors between parameters in the model and real ones. A variable step gradient descent method is proposed which guarantees the estimated model is bounded;
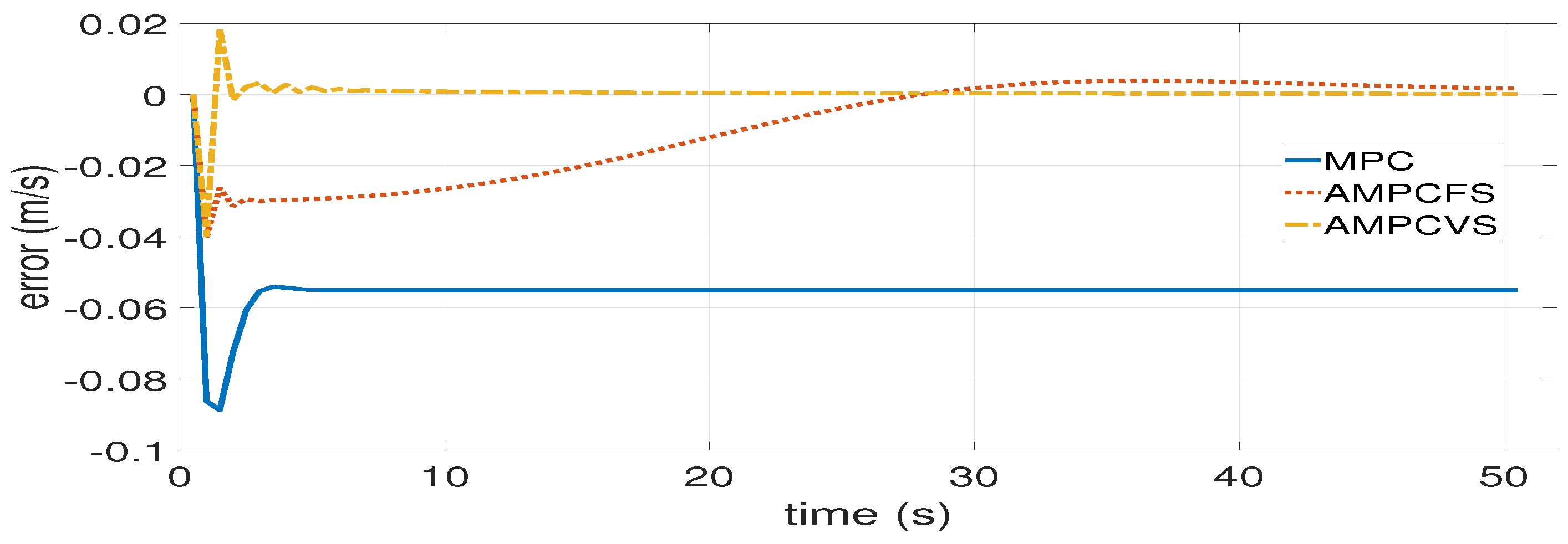
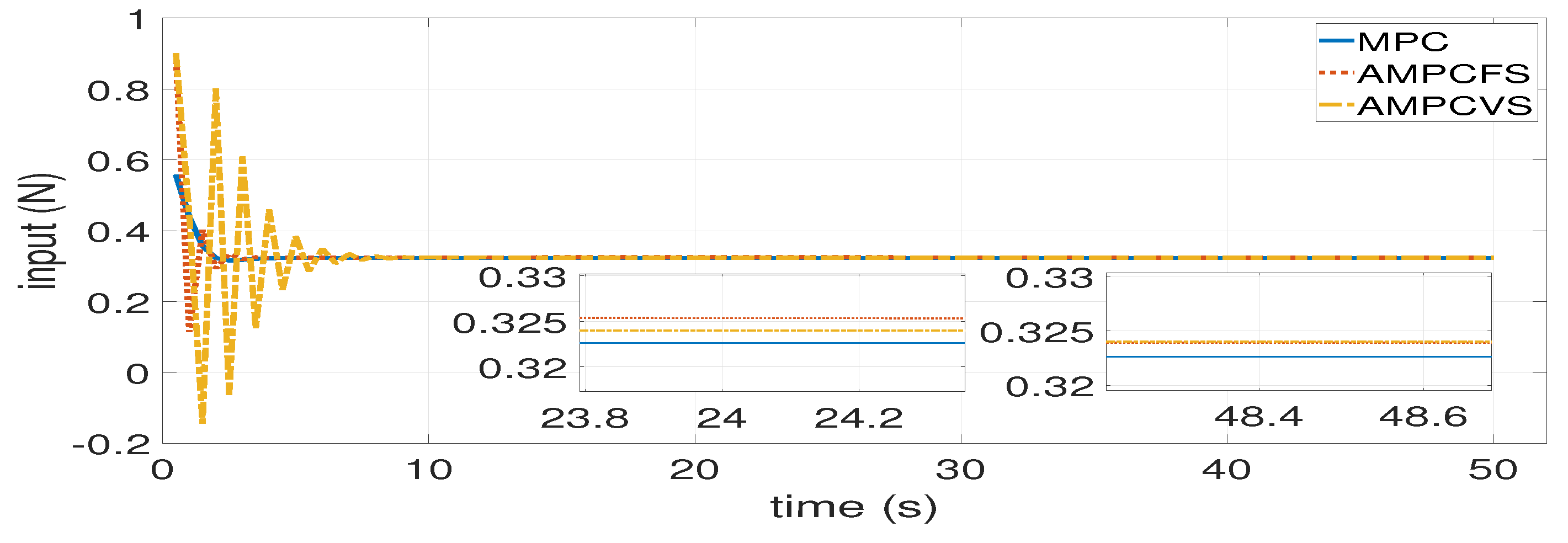
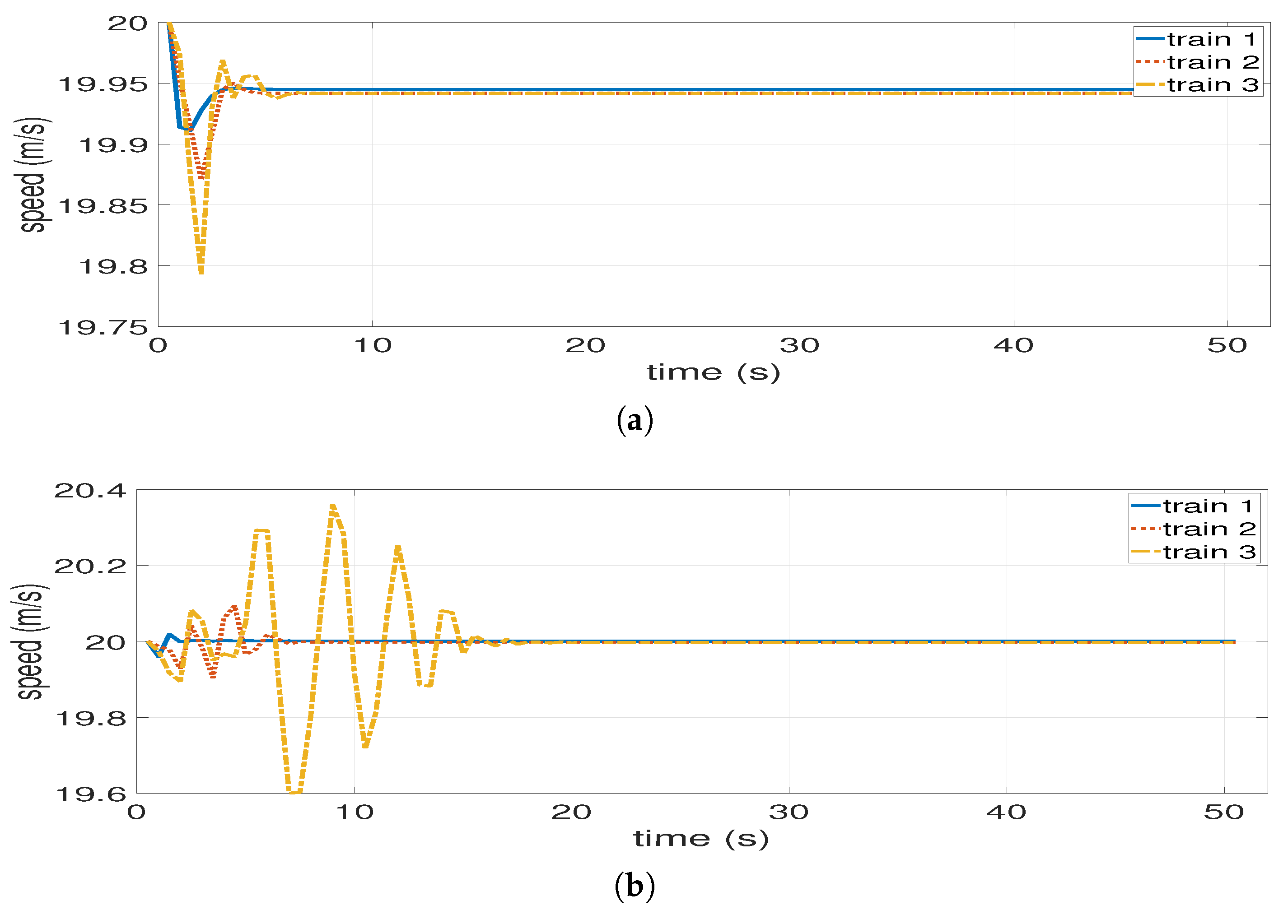
- Simulations are conducted, and the proposed AMPC with a variable step (AMPCVS) system is compared with both nominal MPC system and AMPC with a fixed step (AMPCFS) system. Experimental results prove that the distance error between the actual and desired ones for successive trains in AMPCVS is much smaller than nominal MPC system, and the error in AMPCVS approximates zero faster than the AMPCFS system. These indicate that there is surely an improvement of AMPCVS algorithm when compared to other two systems.
2. Train Dynamics and Virtual Coupling Strategy
2.1. Train Dynamics Model
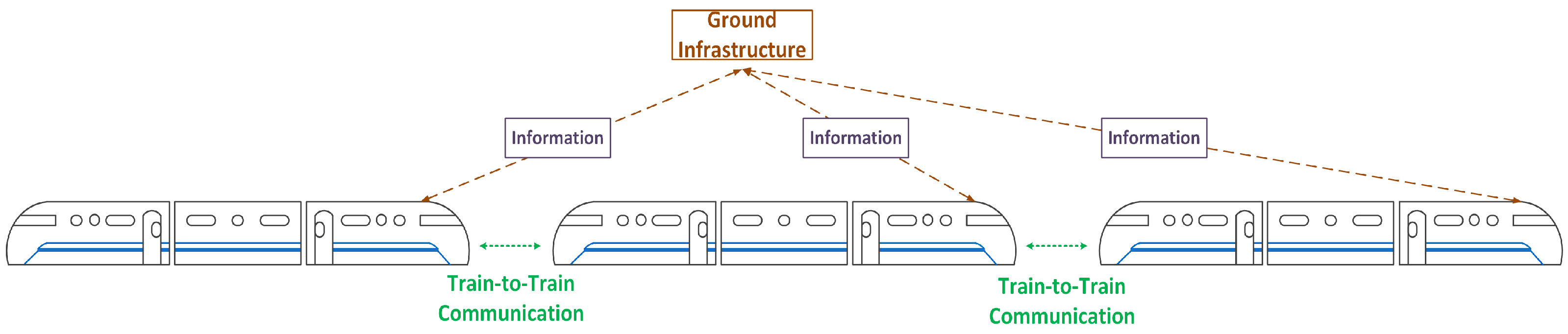
2.2. Control Structure of Trains in VC
3. Distributed Adaptive Model Predictive Control System Designs
3.1. Control System Model
3.2. Distributed Model Predictive Control Designs
3.2.1. Controller for the Leader
3.2.2. Controller for the Followers
3.3. Adaptive Updating Algorithm
3.4. Closing-Loop System
| Algorithm 1 Algorithm for the control system. |
Input: train information , estimated model , other essential information for MPC controller Output: train information , estimated model Algorithm Procedures:
|
4. Experimental Results
4.1. Adaptive Model Predictive Control Algorithm Performance
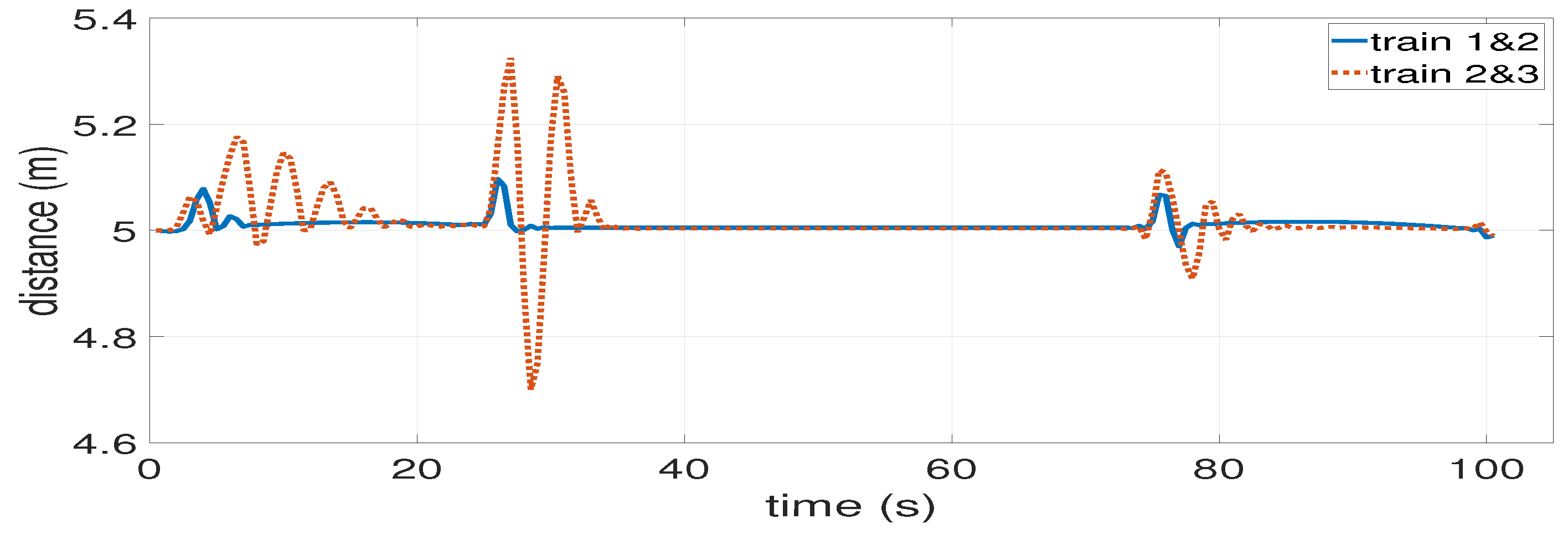
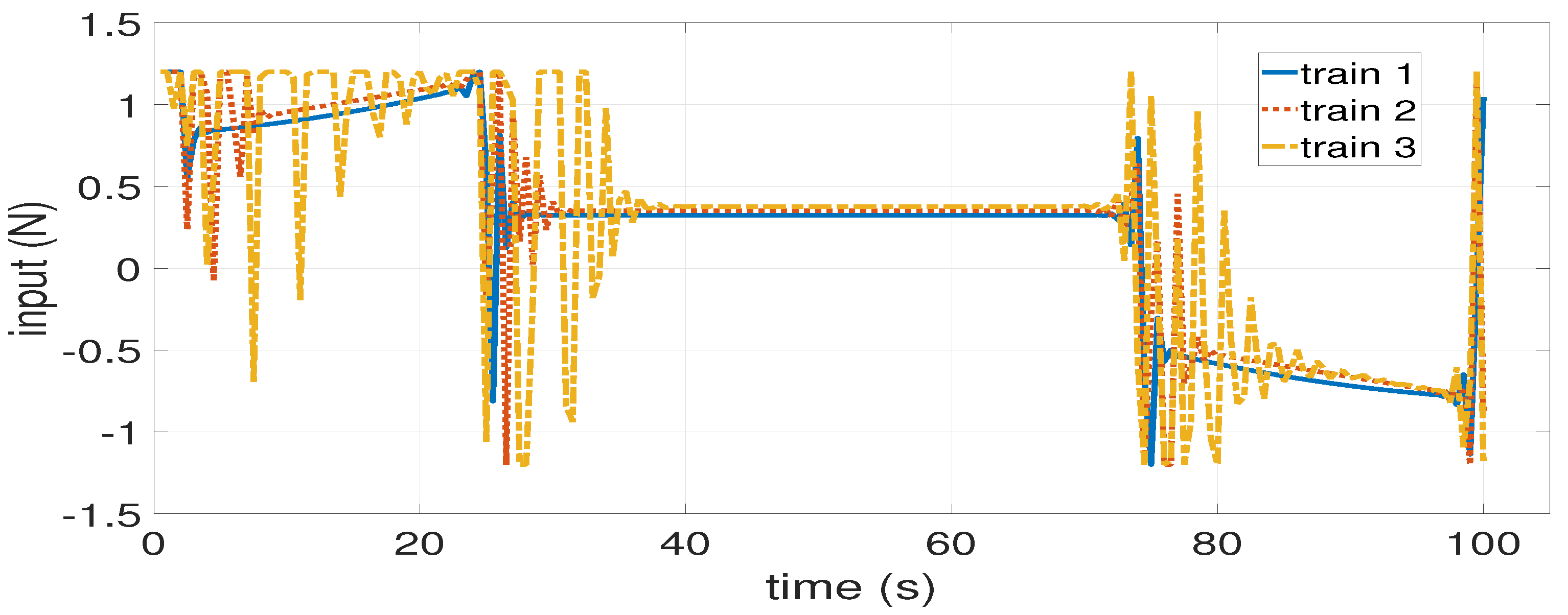
4.2. Inter-Station Driving of Trains in VC
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Quaglietta, E.; Wang, M.; Goverde, R.M.P. A multi-state train-following model for the analysis of virtual coupling railway operations. J. Rail Transp. Plan. Manag. 2020, 15, 1–14. [Google Scholar]
- Bock, U.; Varchmin, J. Enhancement of the occupancy of railroads using ‘virtually coupled train formations’. In Proceedings of the World Congress Railway Research, Tokyo, Japan, 19–23 October 1999; pp. 1–7. [Google Scholar]
- Bock, U.; Bikker, G. Design and development of a future freight train concept—“virtually coupled train formations”. In Proceedings of the IFAC Control in Transportation Systems, Braunschweig, Germany, 13–15 June 2000; pp. 1–6. [Google Scholar]
- Konig, S.; Schnieder, E. Modeling and simulation of an operation concept for future rail traffic. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Oakland, CA, USA, 25–29 August 2001; pp. 808–812. [Google Scholar]
- Haltuf, M. Shift2Rail JU from member state’s point of view. Transp. Res. Procedia 2016, 14, 1819–1828. [Google Scholar] [CrossRef]
- Flammini, F.; Marrone, S.; Nardone, R.; Petrillo, A.; Santini, S.; Vittorini, V. Towards railway Virtual Coupling. In Proceedings of the IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference, Nottingham, UK, 7–9 November 2018; pp. 1–6. [Google Scholar]
- Henke, C.; Tichy, M.; Schneider, T.; Böcker, J.; Schäfer, W. Organization and control of autonomous railway convoys. In Proceedings of the 9th International Symposium on Advance Vehicle Control, Kobe, Japan, 6–9 October 2008; pp. 1–6. [Google Scholar]
- Goikoetxea, J. Roadmap towards the wireless Virtual Coupling of trains. In Proceedings of the International Workshop on Communication Technologies for Vehicles, San Sebastian, Spain, 6–7 June 2016; pp. 3–9. [Google Scholar]
- Xu, X.; Song, Z. Study on Train Control Technology in Virtual Coupling Concept. In Proceedings of the World Congress Railway Research, Tokyo, Japan, 28 October–1 November 2019; pp. 1–7. [Google Scholar]
- Felez, J.; Kim, Y.; Borrelli, F. A model predictive control approach for Virtual Coupling in railways. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2728–2739. [Google Scholar] [CrossRef]
- Gao, S.G.; Dong, H.R.; Ning, B.; Clive, R.; Chen, L.; Sun, X.B. Cooperative adaptive bidirectional control of a train platoon for efficient utility and string stability. Chin. Phys. B 2015, 24, 1–10. [Google Scholar] [CrossRef]
- Bai, W.; Lin, Z.; Dong, H.R.; Ning, B. Distributed cooperative cruise control of multiple high-speed trains under a state-dependent information transmission topology. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2750–2763. [Google Scholar] [CrossRef]
- Saxena, A.; Li, H.; Goswami, D.; Math, C.B. Design and analysis of control strategies for vehicle platooning. In Proceedings of the 19th IEEE Intelligent Transportation Systems, Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1805–1812. [Google Scholar]
- Marais, J.; Beugin, J.; Berbineau, M. A survey of GNSS-based research and developments for the European railway signaling. IEEE Trans. Intell. Transp. Syst. 2018, 10, 2602–2618. [Google Scholar] [CrossRef] [Green Version]
- Cai, B.; Wu, B.; Lu, D. Survey of performance evaluation standardization and research methods on GNSS-based localization for railways. Chin. J. Electron. 2020, 29, 22–33. [Google Scholar] [CrossRef]
- Gómez, A.; Mozoet, E.; Bernadó, L.; Zelenbaba, S.; Thomas Zemen, T.; Parrilla, F.; Alberdi, A. Performance Analysis of ITS-G5 for Smart Train Composition Coupling. In Proceedings of the 16th International Conference on Intelligent Transportation Systems Telecommunications, Lisboa, Portugal, 15–17 October 2018; pp. 1–7. [Google Scholar]
- Zhao, J.; Liu, J.; Yang, L.; Ai, B.; Ni, S. Future 5G-oriented system for urban rail transit: Opportunities and challenges. Chin. Comm. 2021, 18, 1–12. [Google Scholar] [CrossRef]
- Di Meo, C.; Di Vaio, C.; Flammini, F.; Nardone, R.; Santini, S.; Vittorini, V. ERTMS/ETCS Virtual Coupling: Proof of concept and numerical analysis. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2545–2556. [Google Scholar] [CrossRef]
- Park, J.; Lee, B.H.; Eun, Y. Virtual Coupling of railway vehicles: Gap reference for merge and separation, robust control, and position measurement. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Mayne, D.Q. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Lu, Y.; Arkun, Y. Quasi-Min-Max MPC algorithms for LPV systems. Automatica 2000, 36, 527–540. [Google Scholar] [CrossRef]
- Mayne, D.; Raković, S.V.; Findeisen, R.; Allgöwer, F. Robust output feedback model predictive control of constrained linear systems. Automatica 2006, 42, 1217–1222. [Google Scholar] [CrossRef]
- Mayne, D.; Raković, V.S.; Findeisen, R.; Allgöwer, F. Robust output feedback model predictive control of constrained linear systems: Time varying case. Automatica 2006, 45, 2082–2087. [Google Scholar] [CrossRef]
- Xie, L.; Xie, L.; Su, H. A comparative study on algorithms of robust and stochastic MPC for uncertain systems. ACTA Autom. Sin. 2017, 43, 969–992. [Google Scholar]
- Zhu, B.; Xia, X.H. Adaptive model predictive control for unconstrained discrete-time linear systems with parametric uncertainties. IEEE Trans. Autom. Control 2016, 61, 3171–3176. [Google Scholar] [CrossRef]
- Chai, R.; Savvaris, A.; Tsourdos, A.; Chai, S.; Xia, Y. Optimal tracking guidance for aeroassisted spacecraft reconnaissance mission based on receding horizon control. IEEE Trans. Aerosp. Electr. Syst. 2018, 54, 1575–1588. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Peng, J.; Zhang, R.; Chen, B.; Zhou, F.; Yang, Y.Z.; Gao, K.; Huang, Z.W. Adaptive model predictive control for cruise control of high-speed trains with time-varying parameters. J. Adv. Transp. 2019, 2019, 7261726. [Google Scholar] [CrossRef]
- Negenborn, R.R.; Schutter, B.; Hellendoorn, J. Efficient implementation of serial multi-agent model predictive control by parallelization. In Proceedings of the IEEE International Conference on Networking, Sensing and Control, London, UK, 15–17 April 2007; pp. 175–180. [Google Scholar]
- Raković, S.; Kerrigan, E.; Kouramas, L.; Mayne, D. Invariant approximations of the minimal robust positively invariant set. IEEE Trans. Autom. Control 2005, 50, 406–410. [Google Scholar] [CrossRef] [Green Version]
- Mayne, D.Q.; Seron, M.M.; Raković, S.V. Robust model predictive control of constrained linear systems with bounded disturbances. Automatica 2005, 41, 219–224. [Google Scholar] [CrossRef]
- Su, S.; Wang, X.; Cao, Y.; Yin, J. An energy-efficient train operation approach by integrating the metro timetabling and eco-driving. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4252–4268. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| m | 45 | t | N | 3 | - |
| −54,000 | N | 54,000 | N | ||
| 3 | m | 5 | m | ||
| L | 20 | m | 25 | m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, X.; Tang, T.; Liu, H.; Zhang, L.; Li, K. An Adaptive Model Predictive Control System for Virtual Coupling in Metros. Actuators 2021, 10, 178. https://doi.org/10.3390/act10080178
Luo X, Tang T, Liu H, Zhang L, Li K. An Adaptive Model Predictive Control System for Virtual Coupling in Metros. Actuators. 2021; 10(8):178. https://doi.org/10.3390/act10080178
Chicago/Turabian StyleLuo, Xiaolin, Tao Tang, Hongjie Liu, Lei Zhang, and Kaicheng Li. 2021. "An Adaptive Model Predictive Control System for Virtual Coupling in Metros" Actuators 10, no. 8: 178. https://doi.org/10.3390/act10080178
APA StyleLuo, X., Tang, T., Liu, H., Zhang, L., & Li, K. (2021). An Adaptive Model Predictive Control System for Virtual Coupling in Metros. Actuators, 10(8), 178. https://doi.org/10.3390/act10080178