Abstract
The development of vehicle-to-vehicle (V2V) improves the cooperation efficiency of the connected autonomous vehicle (CAV) platoon. However, the failure of the network communication occurs occasionally in the realistic environment, where the ideal fixed information flow topology (FIFT) cannot be adapted. To address this issue, this paper proposes a dynamic information flow topology (DIFT) utilizing a distributed model predictive control (DMPC) algorithm for CAV platoons. When the communication link is broken, the platoon control system will switch to the corresponding collaborative control mode instead of the degeneration to adaptive cruise control (ACC). First, the duty-vehicle dynamic model is constructed. In addition, the constraints with vehicle physical limitations and rear-end collision are considered. The acceleration information of the pedal actuator from the leading vehicle and the states of the predecessor including position, velocity and acceleration are transmitted to the following vehicle with a switch Indicator under DIFT. The cost function with the consideration of DIFT and fuel consumption is formulated for the optimization problem. Comparing with the FIFT, the proposed method is evaluated in the co-simulation of Matlab-TruckSim. The results demonstrate that the proposed DIFT strategy shows the satisfactory performance of the platoon under the communication issues by measuring inter-vehicle space, position and velocity tracking, and acceleration change with high tracking accuracy of position within 1.2 m and velocity within 0.04 m/s.
1. Introduction
Intelligent transportation systems have developed rapidly based on new generation communication technology represented by 5G [1]. The exiting studies proved that an autonomous vehicle platoon shpws better safety and stability in adaptive cruise control (ACC) [2] compared with human drivers [3]. The objective of platooning control is to maintain the desired distances and decrease the velocity errors between the successive vehicles [4]. The application of the vehicle platoon is beneficial to saving energy consumption and improving traffic safety and flow capacity [5,6]. Some realistic projects have been conducted in PATH in the US [7], Energy-ITS in Japan [6], SARTRE in Europe [8], etc. However, the exiting research mostly focuses on the on-board perception system for the predecessor driving information which cannot guarantee the platoon string stability in some cases [9]. With the platoon information in the scope of vehicle-to-vehicle (V2V) communication, the platoon performance can be further improved due to the connected autonomous vehicle information interaction [10].
The framework of the platoon problem is usually divided into four components [11].
- Node dynamics: describes the single vehicle model.
- Information flow topology (IFT): describes the information graph structure in the platooning nodes.
- Distributed controller: describes the control scheme of the platoon.
- Formation geometry: describes the spacing policy to maintain desired space between adjacent vehicles.
Many researches have applied the four-component framework to realistic applications. Second-order and third-order models are usually employed in vehicle models [12,13]. Different IFTs including predecessor following (PF) [14], two predecessor-following (TPF) [15], predecessor-leader following (PLF) [16], etc. are defined based on the communication conditions. The formation geometry is generally divided into constant distance (CD) policy [17] and constant time headway (CTH) [18]. The controller, such as proportional-integral-derivative (PID) [19], sliding mode control [20], and model predictive control [21], is important to be employed for platooning control performance.
The effect caused cannot be ignored when the communication failure occurs, although the CAV platoon brings many advantages. Therefore, the IFT is important for stability in the platoon. Some studies developed the effects of different IFT involving platoon stability and convergence. Zheng et al. studied the effectiveness of the information flow topology on stability and scalability of homogeneous CAV platooning problems [15]. Wu et al. put up with a unified control algorithm that can support a range of information flow topologies. The tracking precision and chattering elimination is shown for the effectiveness of the platoon [22]. Syed et al. studied the influence of the IFT on the platoon control performance, then employed local control to achieve global consensus. The results proved that the weighted and constrained control strategy reduced the complexity of the communication [23]. However, most studies only focus on the fixed IFT in the ideal assumption of communication. In contrast, communication failure usually occurs by accident in the real world, and a dynamic IFT needs to be developed for the adaptive communication of the platoon.
The control of platoon systems is usually divided into two categories of centralized and distributed control. Many researchers developed different centralized methods for platooning. Anan et al. developed a centralized linear quadratic regulator system for platoons with aerodynamic and road slope [24]. Moaveni et al. designed a robust centralized platoon control system based on linear matrix inequalities. The robustness of local stability and string stability was then proven [25]. Based on C2X-Communication, Mazzola et al. proposed a Model Predictive Control (MPC) controller for ACC systems with communication delay problems. The results illustrated the effectiveness and stability of the proposed controller [26]. However, considering large-scale optimization for the multi-vehicle platoon, the computation consumption of the traditional control algorithm is too large to satisfy the real-time system. To improve the computation efficiency of the control problem, Guo et al. presented a fast solving method where the continuation/generalized minimal residual (C/GMRES) was utilized for online optimization. The real-time nonlinear model predictive control algorithm was proven to be efficient in yaw motion control of electric vehicles [27]. Moreover, the method was further developed with cost minimization of vehicle energy management for plug-in hybrid electric vehicles. The results showed the real-time method can mitigate the huge calculation burden in optimization [28]. Besides the improved controller, distributed control also shows high real-time performance and flexibility. Distributed control with the driving information from the IFT has been studied in some researches to achieve the platooning task. Manfredi et al. presented a distributed improved PI control algorithm for heterogeneous vehicle platooning with nonlinear dynamics. Simulations evaluated the performance of the proposed controller in different driving scenarios [29]. Guo et al. designed an adaptive sliding mode control method with preset tracking reference based on the information topology of leader–predecessor and leader-bidirectional information flow. The results show the exogenous disturbance can be reduced with the adaption laws [30]. MPC has advantages to integrate constraints, such as physical limitations of platoon vehicles. In addition, it is suitable to process certain optimization problems, such as fuel efficiency. Gong et al. proposed a distributed model predictive control algorithm according to the feasibility of the solution. Then consensus and stability of the distributed control are analyzed [31]. Li et al. developed a reinforcement learning control method for CAV platoon problems with large-scale action and state spaces named as communication proximal policy optimization. It was proven that the energy consumption in traffic oscillations is reduced [32]. To guarantee the robustness for Cooperative ACC systems, Hadi et al. proposed a learning-based Stochastic Model predictive controller with a probabilistic framework. The result showed satisfactory performance when interfering vehicles cut in [33]. It can be concluded that distributed model predictive control (DMPC) is a suitable approach for the platoon control problems. However, the control strategy with the dynamic information flow topology has rarely been studied.
To reduce the negative influence of the dynamic information flow topology, this paper proposes a distributed model predictive control scheme under dynamic information flow topology, labeled as DIFT for CAV platoons. When communication in one of the platoon links fails, an adaptive control strategy will be employed accordingly to guarantee the stability and robustness of the platoon. The algorithm is verified in the co-simulation environment of TruckSim and Matlab/Simulink. The results demonstrate that the proposed DIFT strategy can improve the platooning system performance for spacing and tracking accuracy as well as driving safety and comfort. The contributions of this paper are as follows.
- A dynamic information topology with communication indicators is proposed to adapt to different communication conditions in platooning.
- A distributed model predictive control algorithm is designed to achieve satisfactory tracking performance of the platoon.
- The dynamics and fuel consumption are considered to simulate the realistic application of heavy-duty vehicles.
The following parts of this paper are organized as follows. Section 2 briefly introduces the platoon based on the DIFT topology. The platoon is modeled based on duty-vehicle dynamics, and the spacing policy is defined adapting to the realistic driving scenarios. The proposed DMPC controller is formulated in Section 3. The proposed control design is validated using Trucksim and Matlab/Simulink in Section 4. Conclusions are provided in Section 5.
2. Problem Statement and Platoon Modeling
2.1. Formulation of DIFT
As shown in Figure 1, each vehicle i in the platoon can receive the acceleration states of the leader and the predecessor with the assumption of no communication failure problems. At the same time, the vehicle i can obtain the predecessor driving states including position and velocity from on-board sensors, such as ladar, camera, etc. In brief, the following vehicle can receive the information from the leader and predecessor, so we label this information flow structure in the dynamic topology as DIFT-PLF.
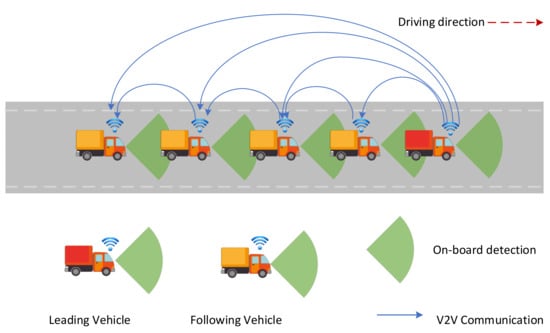
Figure 1.
The information flow topology for DIFT without a communication problem.
However, communication issues always exist in realistic platooning scenarios. The communication link will be broken when the V2V interaction between two vehicles fails. To be specific, the expected DIFT-PLF will degenerate from Figure 2a to Figure 2b–d. When the communication with the leader is broken in Figure 2b, the following vehicle can only obtain the information of the predecessor, labeled as DIFT-PF. The link with the predecessor of V2V is lost in Figure 2c, and the information flow structure can be marked as DIFT-LF. Unfortunately, both V2V communication with leader and predecessor may fail, and the platoon control returns to traditional ACC which is equal to the fixed information flow topology (FIFT) as shown in Figure 2d. Based on these communication scenarios, this paper develops an adaptive control strategy for dynamic information flow topology.
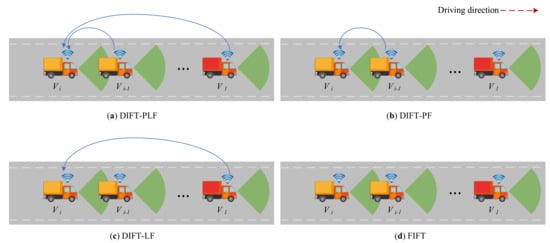
Figure 2.
Different structures in IFT. (a) DIFT-PLF. (b) DIFT-PF. (c) DIFT-LF. (d) ACC of FIFT.
2.2. Platoon Formation
Many studies only employed the kinematics model in the platooning for CAV. However, the realistic vehicle model is rather complicated for control to guarantee the platoon performance. We consider the longitudinal dynamic model for the model predictive control algorithm. As shown in Figure 3, the longitudinal dynamic model with multi-resistance consideration of vehicle i can be described as follows:
where and are the position and velocity of the vehicle i at the discrete time k with the sampling time . is the vehicle mass, and is the tire radius. The engine torque is transmitted to the vehicle driving system with the mechanical efficiency . is the resistance summary of rolling resistance force , aerodynamic resistance force , and gradient resistance force . is the rolling resistance coefficient. is air resistance coefficient. is air density.
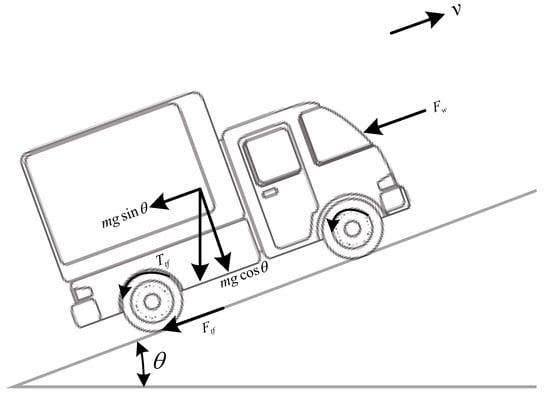
Figure 3.
Vehicl dynamics.
To ensure the satisfactory performance of efficient traffic flowing, a CTH strategy is employed to preset for inter-vehicle spacing distance for the following vehicle to track as follows:
where is the desired distance between vehicle i and vehicle . The constant standstill distance is set as L. is the velocity of vehicle i, and is the predefined time headway.
Define the tracking error states of position and velocity for vehicle i:
where and are the position and velocity of the leading vehicle as the reference.
The vehicle dynamic model can be rewritten as:
Considering the physical limitations of the vehicle states, we define the constraints as follows:
where is the minimum value of velocity, while is the maximum.
For the purpose of driving comfort, the acceleration of vehicles need to be limited.
where is the minimum value of acceleration, while is the maximum.
3. Distributed Model Predictive Controller
In the structure of distributed control, it is supposed to transmit some information among sub-controllers, so that the local controller has some knowledge of other behaviors. In our platooning system, the interactions of sub-controllers are designed as shown in Figure 4. Based on the on-board perception module, the local vehicle node receives the relative position and velocity comparing with the predecessor, i.e., . With the information communication of V2V, it is assumed the local sub-controller can receive additional acceleration information of the leading vehicle as well as the front successive vehicle, i.e., . With the local error state and acceleration references , the local MPC controller works to update the current control for platoon node control in DIFT-PLF.
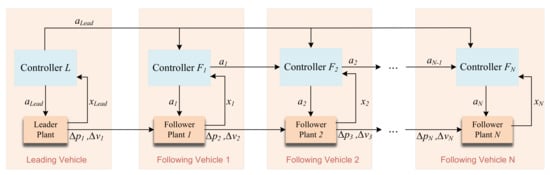
Figure 4.
DMPC Structure.
The ideal IFT may break down by accident, the DIFT-PLF will degrade to lower communication conditions. In more detail, if the communication with the leading vehicle is lost, the local vehicle obtains information which consists of relative position and relative velocity from on-board sensors and reference acceleration , which is called DIFT-PF. Similarly, the source of acceleration information changes to be the leading vehicle in DIFT-LF, when the network between the predecessor and the local vehicle does not work. When the communication system fails, the local vehicle cannot receive any acceleration information from other vehicles over the network. It only relies on the local detection system, which means the system degrades to the FIFT.
Figure 5 shows the control block diagram of the proposed distributed model predictive sub-controller for longitudinal platooning problems. The acceleration of the predecessor and the leader, as well as relative velocity and space distance of the current vehicle node and the predecessor, are set to the input of DMPC. The optimization problem is formulated with the constraints, cost function, and vehicle dynamic model. The acceleration control command is then output to the plant for the following vehicle to achieve the platoon task.
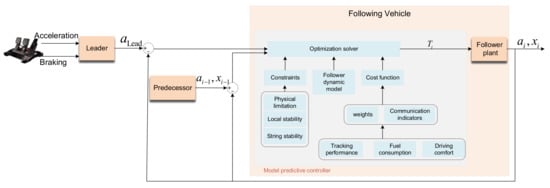
Figure 5.
Control block diagram.
Considering the platoon task as shown in Figure 1, define , then the platoon state can be described as , where n is the number of the vehicle in the platoon. The system state-space function can be described as follows.
where
Definition 1.
(Local Stability) [34]: for a step change of velocity at time k, the error state of system (7) is to asymptotically stabilize to the origin, i.e., the control system is satisfied with local stability.
Definition 2.
(String Stability) [34]: for an arbitrary initial error state , the system statisfies:
where . The platoon system is satisfied with string stability.
One important objective of platooning control is to track the velocity and acceleration of the predecessor when keeping the predefined inter-spacing. At the same time, the acceleration tracking of the leading vehicle is considered.
To save the fuel energy consumption for the heavy-duty vehicle application, this paper considers the fuel function in the objective description as follows:
where and are constants. represents the fuel consumption related to velocity v, and related to the acceleration a. Because the accurate energy consumption function is difficult to formulate, which matters with engine speed, engine torque, temperature, etc. the fuel cost (12) is widely adopted to simulate fuel consumption for economic driving.
To achieve the platoon control, define the total cost function of vehicle i:
The communication status is detected by vehicle on-board devices at each sampling time k. The communication indicators and represent the link with leader and predecessor vehicle by V2V, respectively. The source of reference information can be detected by the local controller for the communication indicator setting. will be switched to 1 when the access from the leader is present. Similarly, will be set to 1 when the V2V communication works well between the predecessor and the follower. In FIFT, and do not exist, and degrade to 0.
The receding horizon control problem of vehicle i can be described as:
where the control constraint set is , the state constraint set is . The string stability parameter is . The terminal constraints in (14)-(3) are to guarantee the local stability, and inequality constraints in (14)-(4) are to ensure the string stability for platooning problems.
The optimization function in Equation (14) is nonlinear and non-convex. If a feasible solution exists, numerical algorithms such as SQP and Active-set can be employed to calculate an optimal solution.
Define as the optimal solution of the optimization problem (14) at time k. According to the principle of the receding horizon control, select the first control valve of as the local control law of the vehicle i:
The close-loop control can be updated by:
4. Results and Discussion
Co-simulation with Matlab/Simulink and TruckSim is performed to evaluate the proposed method for platooning. In detail, a five-vehicle platoon employs the DMPC with DIFT in different information flow topologies shows the system performance when comparing with the FIFT.
4.1. Simulation Setting
To evaluate the proposed method, the mixed scenarios containing accelerating and braking are considered for the leader pedal actuation as the reference information for following vehicles in the platoon. The simulator pedal input signal is illustrated in the Figure 6 in which the leading vehicle brakes with m/s over s and accelerates with 2 m/s over s. The parameters of the five-vehicle platoon are preset as the initial position of m with the velocity of m/s.
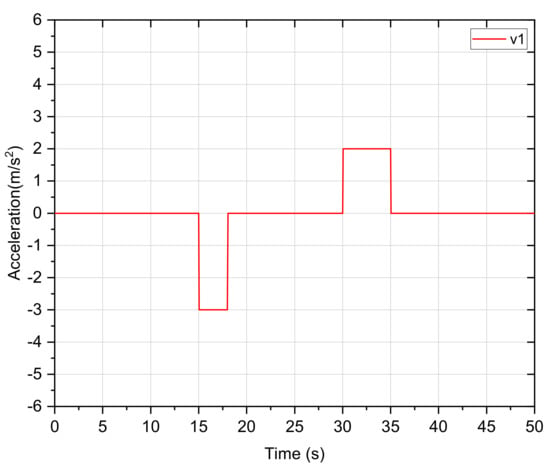
Figure 6.
Padel input.
The vehicle dynamic is constructed in the heavy-duty vehicle simulation environment of TruckSim, and the platoon control algorithm is executed in Matlab/Simulink. Vehicle dynamic analysis is performed by feeding calculated optimal control to the vehicle plant using the distributed MPC for the total simulation time of 50 s. To achieve the CTH space strategy, is defined as 1 s. The constant standstill distance is m. As for model predictive control parameters, the platoon control constraints are preset as: m/s, m/s, m/s, m/s. The prediction horizon is set as , and the control horizon as . To be more specific, the weight matrices Q, R and IFT Indicator , are listed in Table 1. In FIFT, all following vehicles can only receive the predecessor information from the on-board detection unit (i.e., ). In DIFT, the first follower vehicle can only obtain the acceleration information from the leader vehicle with the inter-vehicle network (i.e., ). In addition, other follower controllers can switch among three DIFT with indicators of , shown in Table 1. The proposed method is applied in the co-simulation environment and displayed in TruckSim, as shown in Figure 7, under dynamic communication conditions.

Table 1.
Control parameters in different IFTs.

Figure 7.
Co-simulation in Matlab/Simulink-TruckSim.
4.2. Simulation Results and Discussion
The simulation results of platoon driving control and system performance are presented from Figure 8, Figure 9, Figure 10, Figure 11, Figure 12, Figure 13 and Figure 14 The mean value of the actual simulation computational time is s for one cycle control, which is eligible for the efficiency of the platooning task. The curves in the Figure 8 are all nearly parallel without intersection, which illustrates following vehicles in each communication scenario of IFT can track behind the predecessor without rear-end collision. All vehicles can maintain a certain inter-vehicle distance with successive ones under all IFT conditions, which demonstrates that the proposed DMPC algorithm is effective for position tracking in CAV platooning problems. Figure 8a shows great oscillation especially at the time of starting and velocity change phases, while Figure 8b–d representing different DIFT forms show good position tracking performance with smooth change. DIFT shows better position tracking ability than traditional FIFT. For more details, Figure 9 illustrates the spacing distances of following vehicles in the platoon under different IFTs. In general, all spacing variation tendencies are basically consistent. It proves that the proposed DMPC method shows consensus under different communication scenarios. It is obvious that the FIFT in Figure 9a show bigger turbulence than other DIFTs in Figure 9b–d. Therefore, it can be concluded that the acceleration information of the leader and predecessor vehicles is necessary to improve the tracking accuracy in platoon problems.
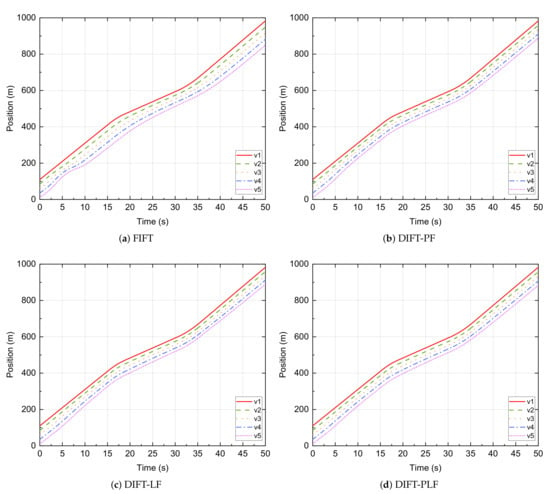
Figure 8.
Position tracking.
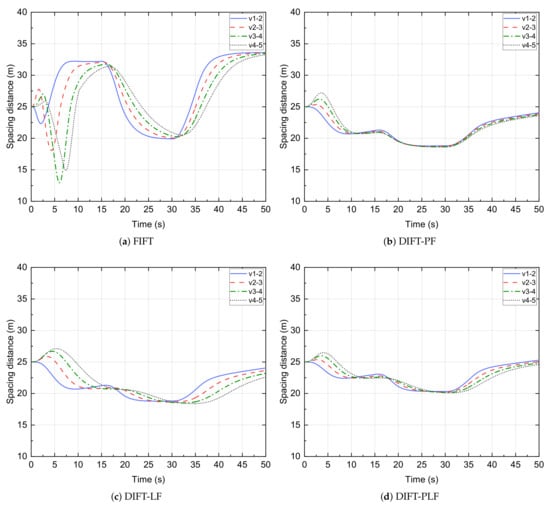
Figure 9.
Space distances between adjacent vehicles.
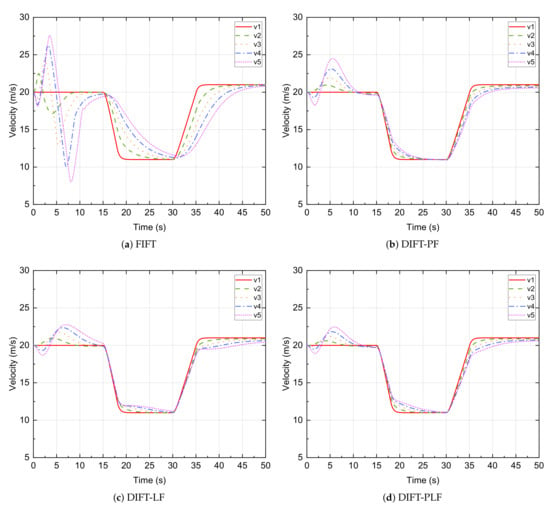
Figure 10.
Velocity tracking.
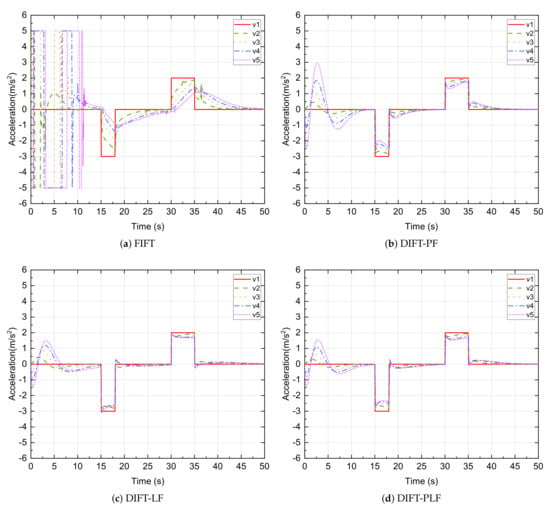
Figure 11.
Acceleration data.
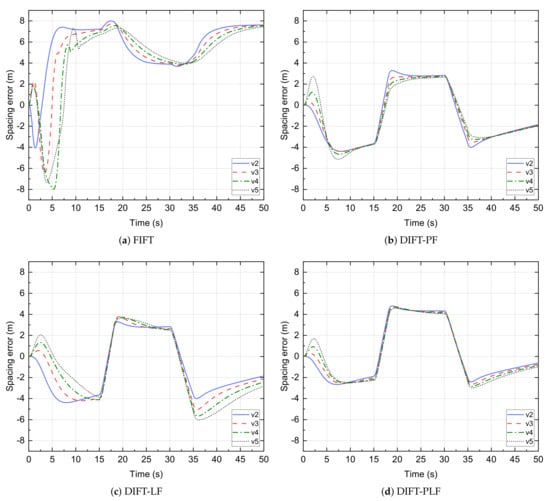
Figure 12.
Space error data.
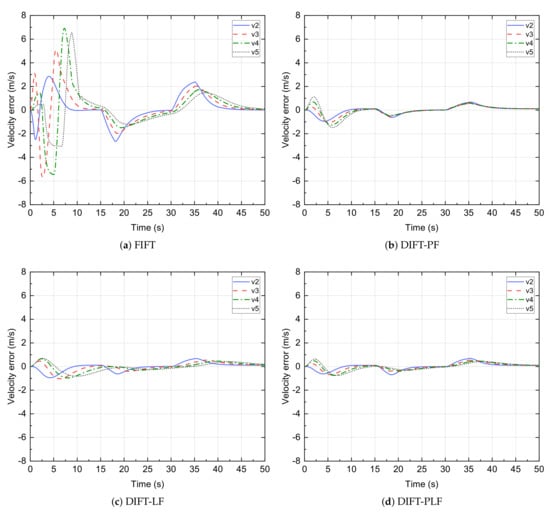
Figure 13.
Velocity tracking errors.
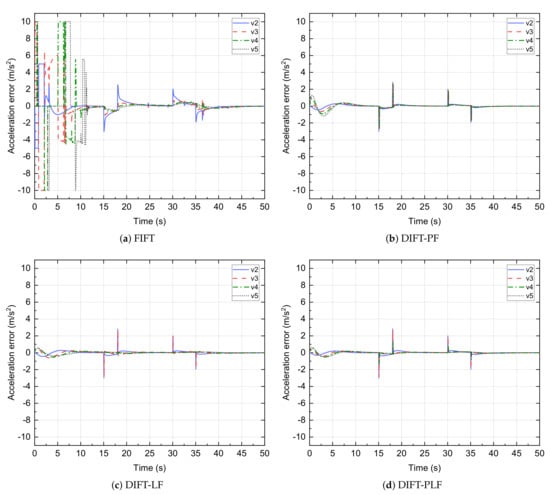
Figure 14.
Acceleration error.
Figure 10 shows the velocity profile of the platoon with the reference input of the leading vehicle as the results of acceleration pedal control. The leader starts to decelerate from 20 m/s to 11 m/s with the acceleration of m/s of s. At the simulation time of s, the platoon begins to accelerate with m/s for the following acceleration period of 5 s. The FIFT shows huge velocity oscillation and tracking delay comparing with the reference velocity. In contrast, the DIFT-PF, DIFT-LF, DIFT-PLF shows little fluctuation and better velocity tracking performance, illustrating that the acceleration information can also increase the velocity accuracy. Moreover, DIFT-PLF shows the best speed tracking performance among the three DIFT communication scenarios.
Figure 11 shows the acceleration results of all vehicles in the platoon. It can be seen that DIFTs is obviously better than FIFT in Figure 11a in terms of tracking the input information of the leader vehicle. The FIFT acceleration input commands reach the limitations in some phases and are forced to be constrained. Moreover, the DIFT-LF in Figure 11c shows the best convergence of all vehicles in the platoon, followed by DIFT-PLF in Figure 11d and DIFT-PF in Figure 11b. Therefore, the control input is efficient for the optimization problem of platooning to calculate the control commands for tracking and stability of the entire platoon.
To quantize the platoon performance, Figure 12, Figure 13 and Figure 14 show the errors of space distance, velocity, and acceleration. The errors change relatively quickly in the phase of the acceleration control input and smoothly in the other phases, which proves the effectiveness and quick convergence of the proposed DMPC algorithm for the platoon. As shown in Figure 12, it is clear that the space error of DIFT is smaller than FIFT in any communication conditions, as well as more stable. To be more specific, the space error scopes in FIFT, DIFT-PF, DIFT-LF, DIFT-PLF as shown in Figure 12b–d, are listed as m, m, m, m. The mean value of the spacing error of the above four communication conditions is m, m, m, m, respectively. It further demonstrates that the proposed dynamic IFT strategy can effectively promote platoon tracking performance with the assistance control information of the leader and predecessor.
Figure 13 shows the velocity tracking errors of FIFT in Figure 13a and DIFTs in Figure 13b–d. The velocity errors of FIFT oscillate irregularly at the start of the simulation; the system spends a lot of time obtaining relative speed with the maximum error of 6.913 m/s. In contrast, all DIFTs perform stable and convergent speed tracking with low velocity errors. To be specific, the maximum velocity error scope of DIFT-PF, DIFT-LF, DIFT-PLF is within m/s, m/s, m/s, respectively. The mean values of velocity tracking errors of above four information topologies are m/s, m/s, m/s, m/s. Since DIFT-PLF presents great accuracy and convergence, it further demonstrates the proposed control strategy can improve the effectiveness and string stability in CAV platoon problems.
The errors of acceleration control are illustrated in Figure 14. As shown in Figure 14a, the errors of the FIFT structure are huge and fluctuate sharply during the first simulation phase about 10 s. At the acceleration input time point of 15 s, 18 s, 30 s and 35 s, the errors dramatically change and regress to the consistent value slowly. In contrast, the sudden changes of acceleration errors appear at the beginning and ending time points of the control input, but regression to origin is fast in all DIFTs. For more details, the maximum acceleration of DIFT-PF in Figure 14b, DIFT-LF in Figure 14c, DIFT-PLF in Figure 14d is m/s, m/s, m/s, respectively. In addition, smooth acceleration change can also improve driving comfort and tracking accuracy.
Table 2 summarizes the system performance of FIFT, DIFT-PF, DIFT-LF, DIFT-PLF. All space errors and velocities of vehicle in the platoon are positive, which demonstrates the proposed method can avoid rear-end collision and always move forward. The mean value of tracking performance of DIFT is much smaller than FIFT as shown in Table 2. It illustrates that the tracking accuracy of the position is within m and velocity within m/s in DIFT. The maximum space error decreases progressively as with FIFT, DIFT-LF, DIFT-PF, and DIFT-PLF which also shows the minimum velocity error. At the same time, the velocity errors of the DIFT method are much smaller than FIFT as high as m/s. The peak acceleration of DIFT-PLF is the smallest as m/s, compared with the DIFT-PF and DIFT-LF with a value around |3 m/s|, which is further smaller than FIFT which achieves m/s. It can be concluded that the DIFT method can improve driving safety and comfort.
Table 2.
Control parameters in DIFT.
In summary, Figure 8, Figure 9, Figure 10, Figure 11, Figure 12, Figure 13 and Figure 14 and Table 2 show the proposed distributed model predictive control can achieve high tracking accuracy of the position, the space distance and velocity and acceleration. The comparison with DIFT and FIFT demonstrates that the dynamic information flow strategy is adaptive to the platoon driving problem and effective to improve the system performance.
5. Conclusions
Considering the realistic communication conditions where the linkage may be interrupted in the platoon network, this paper proposes a distributed model predictive control method with dynamic information flow topology. The acceleration information of the leader and predecessor is employed to improve the platoon tracking performance. Moreover, the vehicle dynamic model and fuel consumption are considered for the application of the autonomous heavy-duty vehicle platoon. The simulation results show that the proposed DIFT strategy with the DMPC algorithm improves the tracking accuracy in terms of spatial distance, velocity, and acceleration, compared with the FIFT without acceleration information. It shows high tracking accuracy of the position within 1.2 m and velocity within 0.04 m/s. In addition, this paper indicates some directions for future work. One is to consider time delay in the platoon information flow section. Moreover, the heterogeneous platoon dynamics model needs to be addressed with more complex driving scenarios. The real-time control method is also another important direction for the realistic fast-solving application.
Author Contributions
Conceptualization, F.Z. and Y.L.; methodology, F.Z. and J.W.; software, L.W.; validation, F.Z. and L.W.; formal analysis, F.Z.; data curation, F.Z.; writing—original draft preparation, F.Z.; writing—review and editing, J.W. and Y.L.; visualization, F.Z.; supervision, Y.L.; project administration, L.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key Research and Development Program of China (2019YFB1600100).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Detailed data are contained within the article. More data that support the findings of this study are available from the author F.Z. upon reasonable request.
Acknowledgments
The authors are grateful for the support of the School of Transportation Science and Engineering, School of Computer Science and Engineering of Beihang University, Beijing Trunk Technology Co., Ltd. All authors appreciate the contributors Chao Wang and Tianlei Zhang who provided valuable investigation and resources for our work from Beijing Trunk Technology Co., Ltd.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| V2V | Vehicle to Vehicle |
| CAV | Connected Autonomous Vehicle |
| ACC | Adaptive Cruise Control |
| IFT | Information Flow Topology |
| FIFT | Fixed Information Flow Topology |
| DIFT | Dynamic Information Flow Topology |
| DMPC | Distributed Model Predicitive Control |
| CD | Constant Distance |
| CTH | Constant Time Headway |
| PF | Predecessor Following |
| LF | Leader Following |
| PLF | Predecessor–Leader Following |
References
- Din, S.; Paul, A.; Rehman, A. 5G-enabled Hierarchical architecture for software-defined intelligent transportation system. Comput. Netw. 2019, 150, 81–89. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, Z.; Yan, M. An Optimization Design of Adaptive Cruise Control System Based on MPC and ADRC. Actuators 2021, 10, 110. [Google Scholar] [CrossRef]
- Xiao, L.; Gao, F. Practical string stability of platoon of adaptive cruise control vehicles. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1184–1194. [Google Scholar] [CrossRef]
- Sheikholeslam, S.; Desoer, C.A. Longitudinal control of a platoon of vehicles. In Proceedings of the 1990 American Control Conference, San Diego, CA, USA, 23–25 May 1990; pp. 291–296. [Google Scholar]
- Jia, D.; Lu, K.; Wang, J.; Zhang, X.; Shen, X. A survey on platoon-based vehicular cyber-physical systems. IEEE Commun. Surv. Tutor. 2015, 18, 263–284. [Google Scholar] [CrossRef] [Green Version]
- Tsugawa, S.; Kato, S.; Aoki, K. An automated truck platoon for energy saving. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4109–4114. [Google Scholar]
- Michael, J.B.; Godbole, D.N.; Lygeros, J.; Sengupta, R. Capacity analysis of traffic flow over a single-lane automated highway system. J. Intell. Transp. Syst. 1998, 4, 49–80. [Google Scholar] [CrossRef]
- Robinson, T.; Chan, E.; Coelingh, E. Operating platoons on public motorways: An introduction to the sartre platooning programme. In Proceedings of the 17th World Congress on Intelligent Transport Systems, Venue, Sydney, 25–29 October 2010; Volume 1, p. 12. [Google Scholar]
- Bian, Y.; Zheng, Y.; Ren, W.; Li, S.E.; Wang, J.; Li, K. Reducing time headway for platooning of connected vehicles via V2V communication. Transp. Res. Part C Emerg. Technol. 2019, 102, 87–105. [Google Scholar] [CrossRef]
- Ma, F.; Yang, Y.; Wang, J.; Liu, Z.; Li, J.; Nie, J.; Shen, Y.; Wu, L. Predictive energy-saving optimization based on nonlinear model predictive control for cooperative connected vehicles platoon with V2V communication. Energy 2019, 189, 116120. [Google Scholar] [CrossRef]
- Li, S.E.; Zheng, Y.; Li, K.; Wang, J. An overview of vehicular platoon control under the four-component framework. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 286–291. [Google Scholar]
- Hao, H.; Barooah, P. Stability and robustness of large platoons of vehicles with double-integrator models and nearest neighbor interaction. Int. J. Robust Nonlinear Control. 2013, 23, 2097–2122. [Google Scholar] [CrossRef]
- Ghasemi, A.; Kazemi, R.; Azadi, S. Stable decentralized control of a platoon of vehicles with heterogeneous information feedback. IEEE Trans. Veh. Technol. 2013, 62, 4299–4308. [Google Scholar] [CrossRef]
- Knorn, S.; Donaire, A.; Agüero, J.C.; Middleton, R.H. Passivity-based control for multi-vehicle systems subject to string constraints. Automatica 2014, 50, 3224–3230. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Wang, J.; Cao, D.; Li, K. Stability and scalability of homogeneous vehicular platoon: Study on the influence of information flow topologies. IEEE Trans. Intell. Transp. Syst. 2015, 17, 14–26. [Google Scholar] [CrossRef] [Green Version]
- Shaw, E.; Hedrick, J.K. String stability analysis for heterogeneous vehicle strings. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 3118–3125. [Google Scholar]
- Peters, A.A.; Middleton, R.H.; Mason, O. Leader tracking in homogeneous vehicle platoons with broadcast delays. Automatica 2014, 50, 64–74. [Google Scholar] [CrossRef]
- Gong, S.; Zhou, A.; Peeta, S. Cooperative adaptive cruise control for a platoon of connected and autonomous vehicles considering dynamic information flow topology. Transp. Res. Rec. 2019, 2673, 185–198. [Google Scholar] [CrossRef]
- No, T.S.; Chong, K.T.; Roh, D.H. A Lyapunov function approach to longitudinal control of vehicles in a platoon. In Proceedings of the 2000 IEEE 51st Vehicular Technology Conference Proceedings (Cat. No. 00CH37026), Tokyo, Japan, 15–18 May 2000; Volume 1, pp. 336–340. [Google Scholar]
- Kwon, J.W.; Chwa, D. Adaptive bidirectional platoon control using a coupled sliding mode control method. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2040–2048. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Li, K.; Borrelli, F.; Hedrick, J.K. Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies. IEEE Trans. Control. Syst. Technol. 2016, 25, 899–910. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Li, S.E.; Cortés, J.; Poolla, K. Distributed sliding mode control for nonlinear heterogeneous platoon systems with positive definite topologies. IEEE Trans. Control. Syst. Technol. 2019, 28, 1272–1283. [Google Scholar] [CrossRef]
- Syed, A.; Yin, G.; Pandya, A.; Zhang, H. Coordinated vehicle platoon control: Weighted and constrained consensus and communication network topologies. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 4057–4062. [Google Scholar]
- Kaku, A.; Mukai, M.; Kawabe, T. A centralized control system for ecological vehicle platooning using linear quadratic regulator theory. Artif. Life Robot. 2012, 17, 70–74. [Google Scholar] [CrossRef]
- Moaveni, B.; Movahedi, M. Centralized Controller Design for the Moving Vehicles in a Platoon to Achieve the Robust String Stability. J. Control. 2015, 9, 1–12. [Google Scholar]
- Mazzola, M.; Schaaf, G. Modeling and control design of a centralized adaptive cruise control system. Int. J. Inf. Commun. Eng. 2014, 8, 1177–1181. [Google Scholar]
- Guo, N.; Lenzo, B.; Zhang, X.; Zou, Y.; Zhai, R.; Zhang, T. A real-time nonlinear model predictive controller for yaw motion optimization of distributed drive electric vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4935–4946. [Google Scholar] [CrossRef] [Green Version]
- Guo, N.; Zhang, X.; Zou, Y.; Guo, L.; Du, G. Real-time predictive energy management of plug-in hybrid electric vehicles for coordination of fuel economy and battery degradation. Energy 2021, 214, 119070. [Google Scholar] [CrossRef]
- Manfredi, S.; Petrillo, A.; Santini, S. Distributed PI Control For Heterogeneous Nonlinear Platoon of Autonomous Connected Vehicles. IFAC-Pap. 2020, 53, 15229–15234. [Google Scholar]
- Guo, G.; Li, D. Adaptive sliding mode control of vehicular platoons with prescribed tracking performance. IEEE Trans. Veh. Technol. 2019, 68, 7511–7520. [Google Scholar] [CrossRef]
- Gong, S.; Du, L. Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles. Transp. Res. Part B Methodol. 2018, 116, 25–61. [Google Scholar] [CrossRef]
- Li, M.; Cao, Z.; Li, Z. A Reinforcement Learning-Based Vehicle Platoon Control Strategy for Reducing Energy Consumption in Traffic Oscillations. IEEE Trans. Neural Networks Learn. Syst. 2021. [Google Scholar] [CrossRef]
- Kazemi, H.; Mahjoub, H.N.; Tahmasbi-Sarvestani, A.; Fallah, Y.P. A learning-based stochastic MPC design for cooperative adaptive cruise control to handle interfering vehicles. IEEE Trans. Intell. Veh. 2018, 3, 266–275. [Google Scholar] [CrossRef] [Green Version]
- Dunbar, W.B.; Caveney, D.S. Distributed receding horizon control of vehicle platoons: Stability and string stability. IEEE Trans. Autom. Control. 2011, 57, 620–633. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).