
Development and Performance Evaluation of a Precise Application System for Liquid Starter Fertilizer while Sowing Maize

Abstract
:1. Introduction
2. Materials and Methods
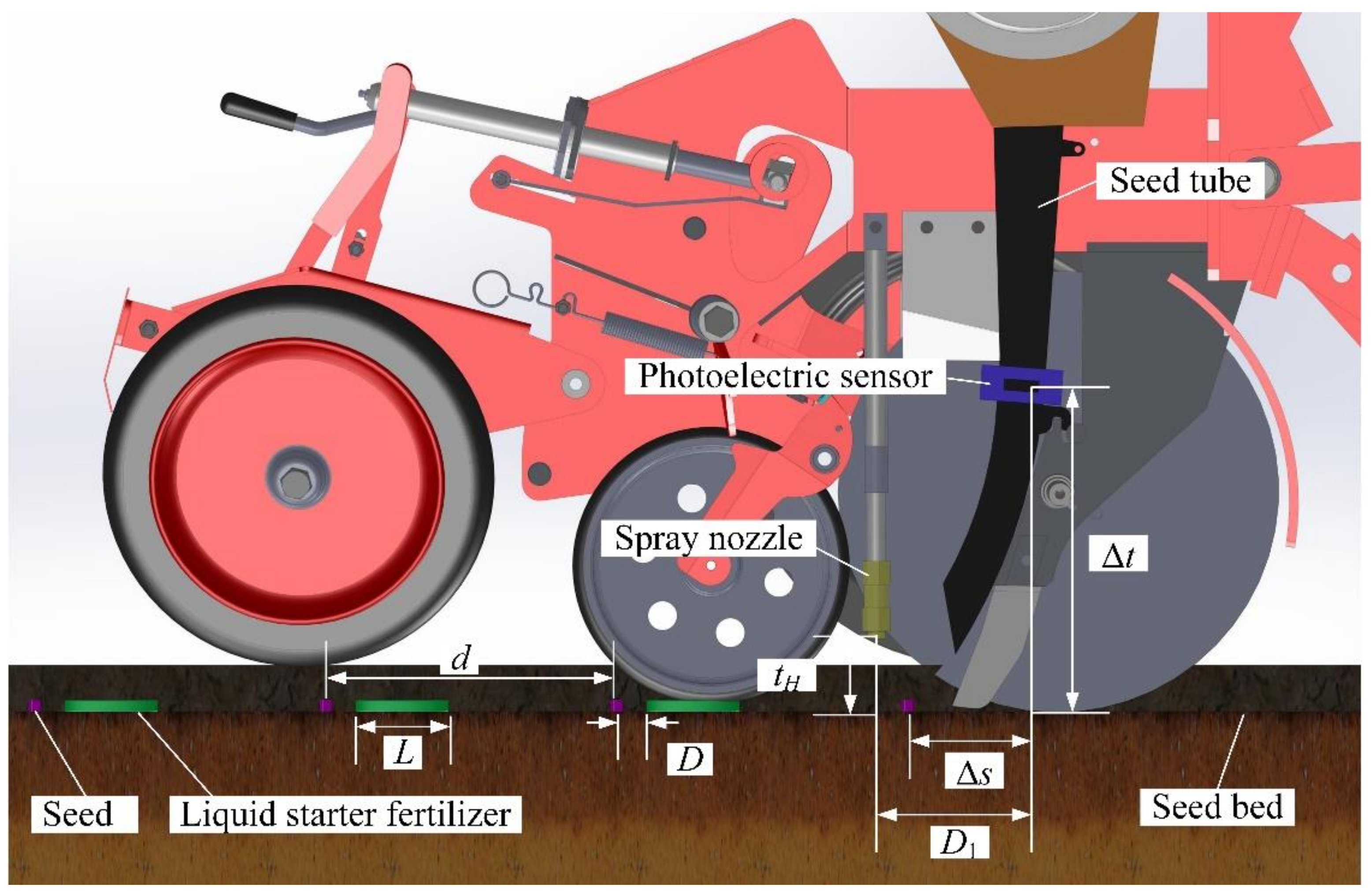
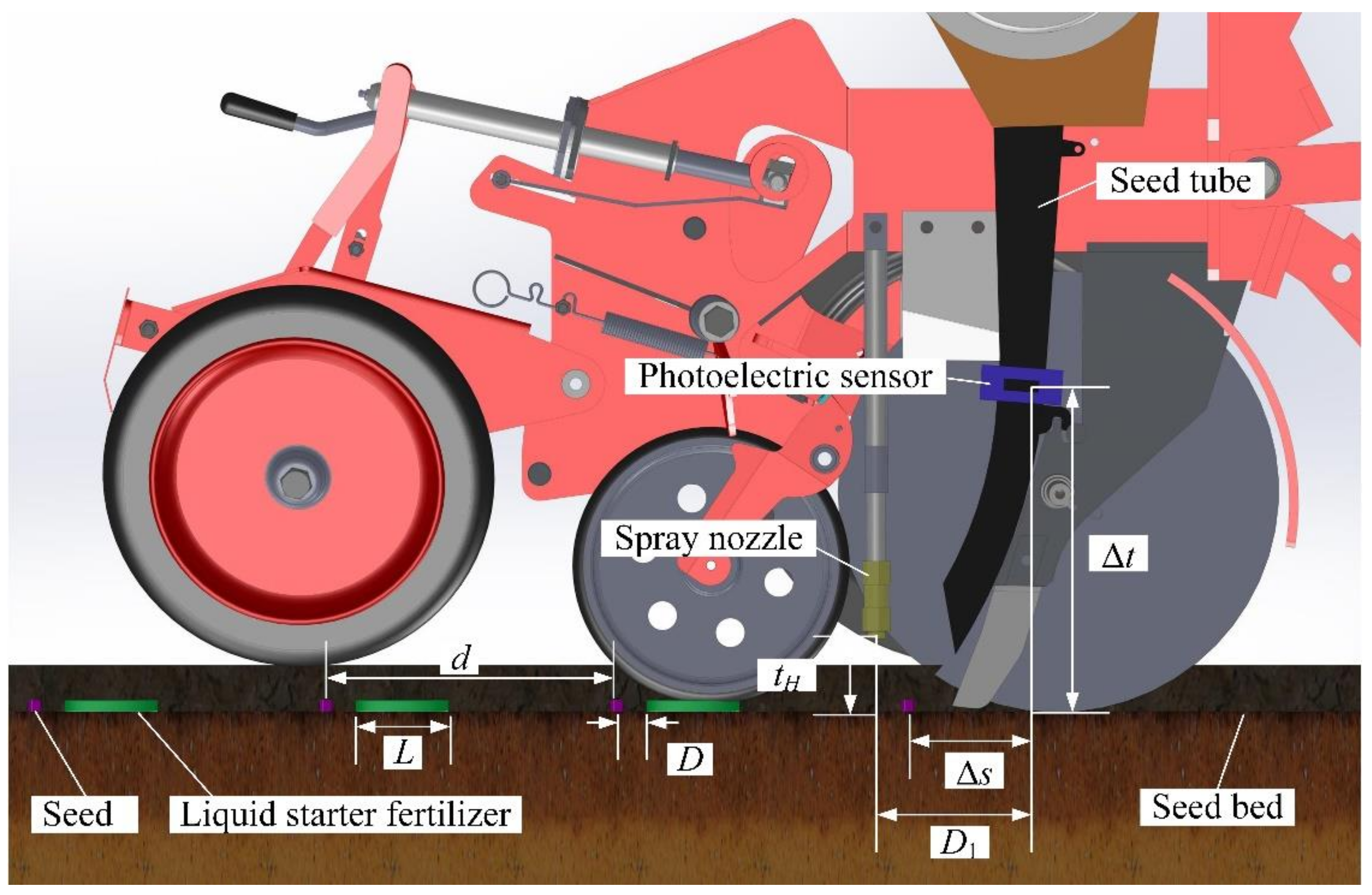
2.1. Description of Method of Precisely Applying Liquid Starter Fertilizer
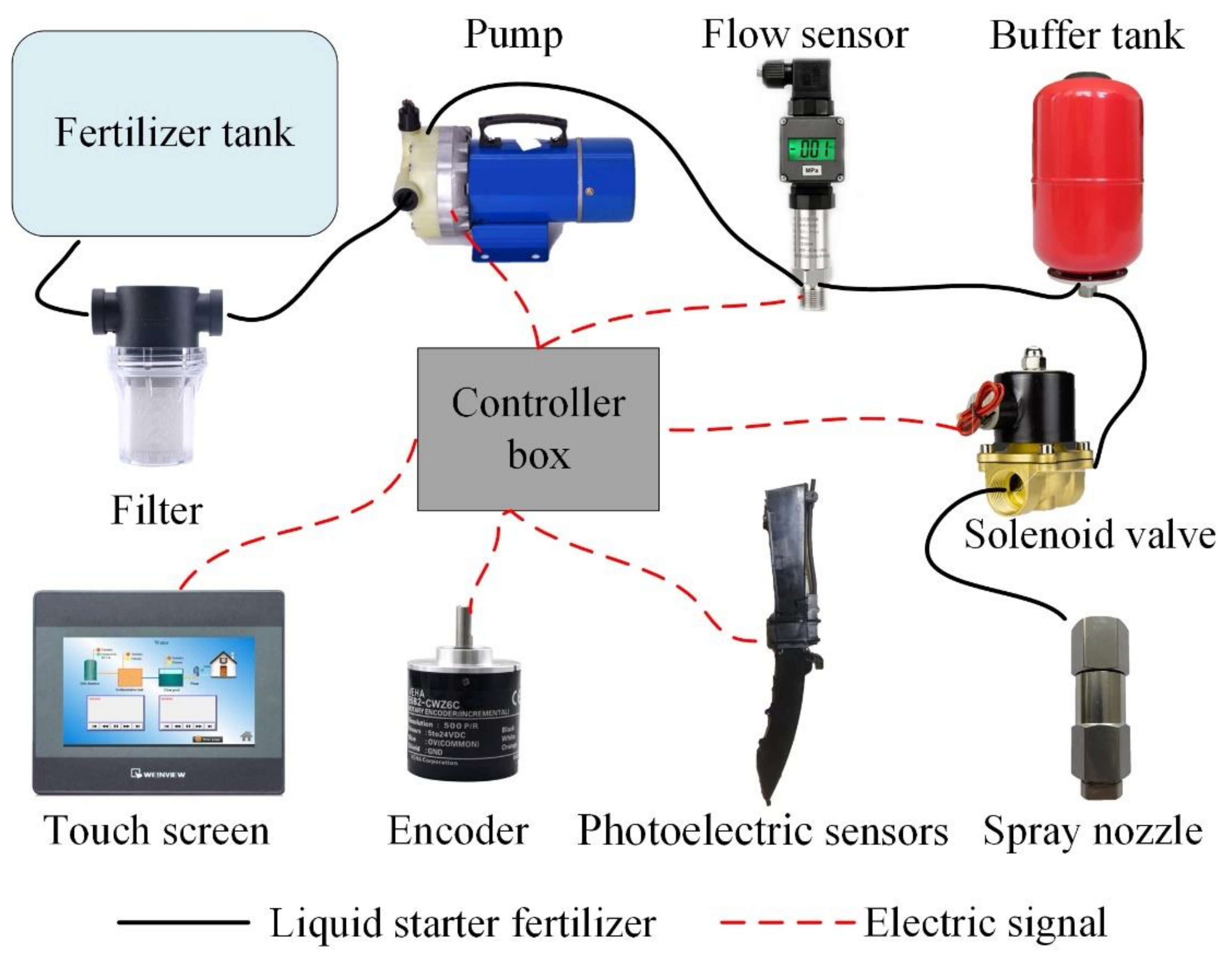
2.2. Design of the Precise Application System
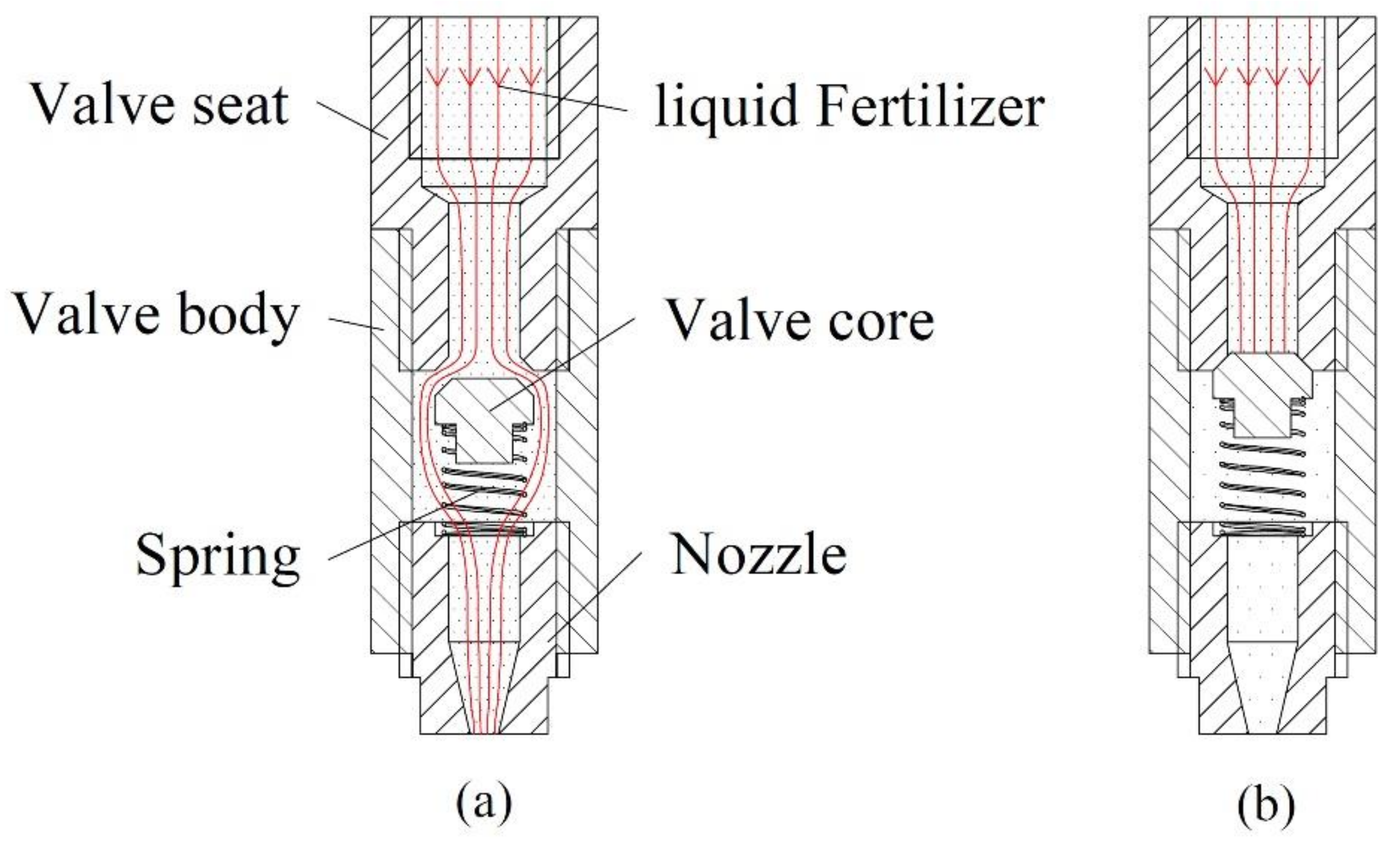
2.2.1. Liquid Starter Fertilizer Supply System
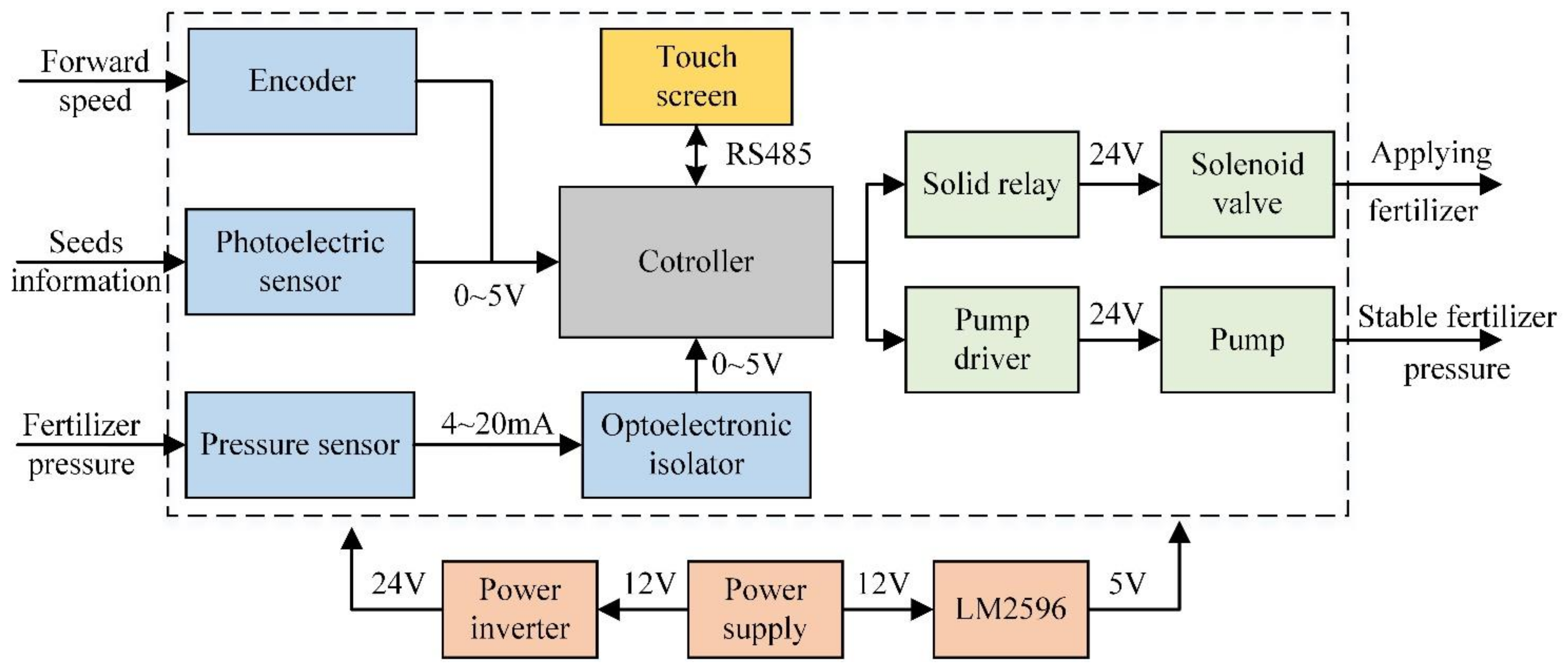
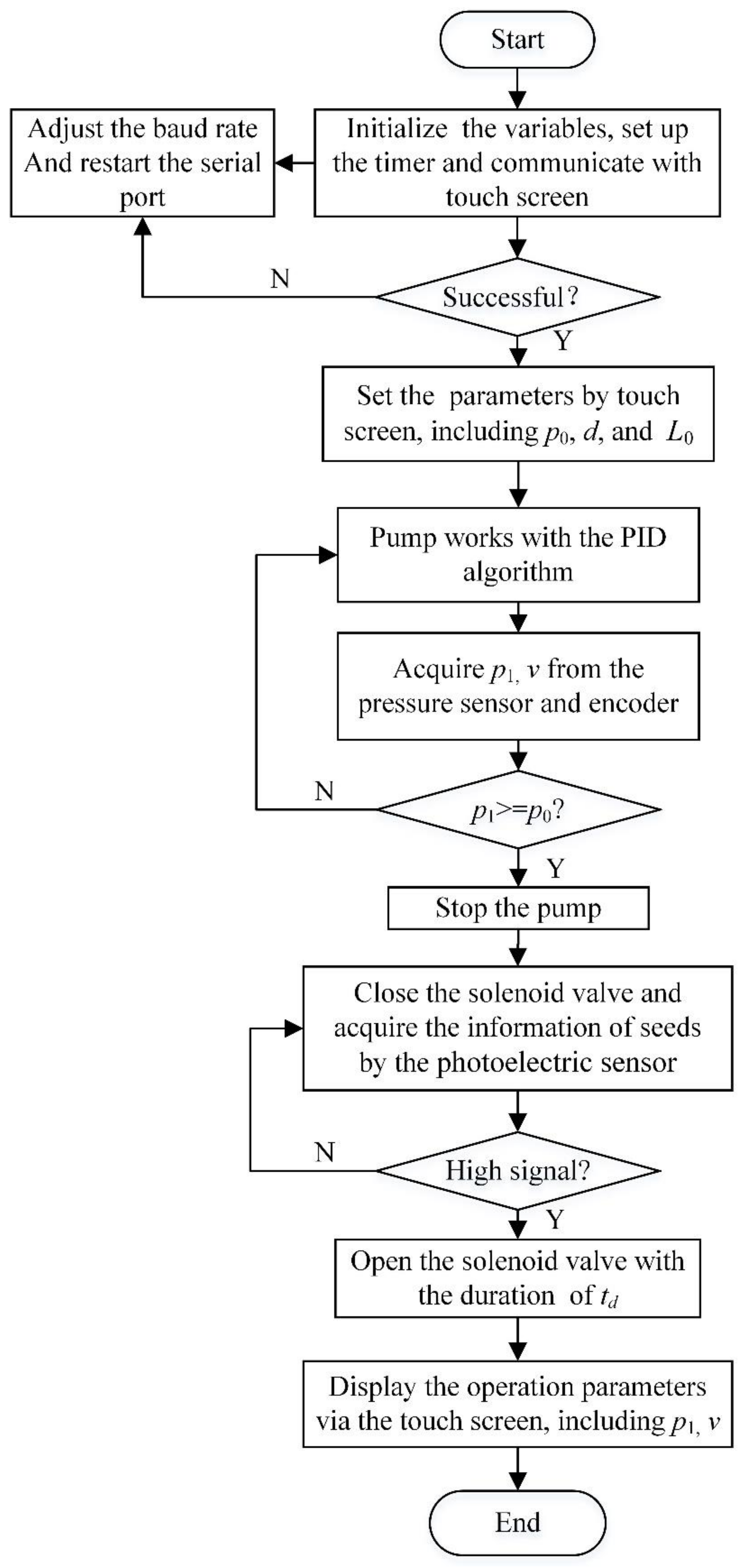
2.2.2. Detection Control System
2.3. Evaluation Experiments
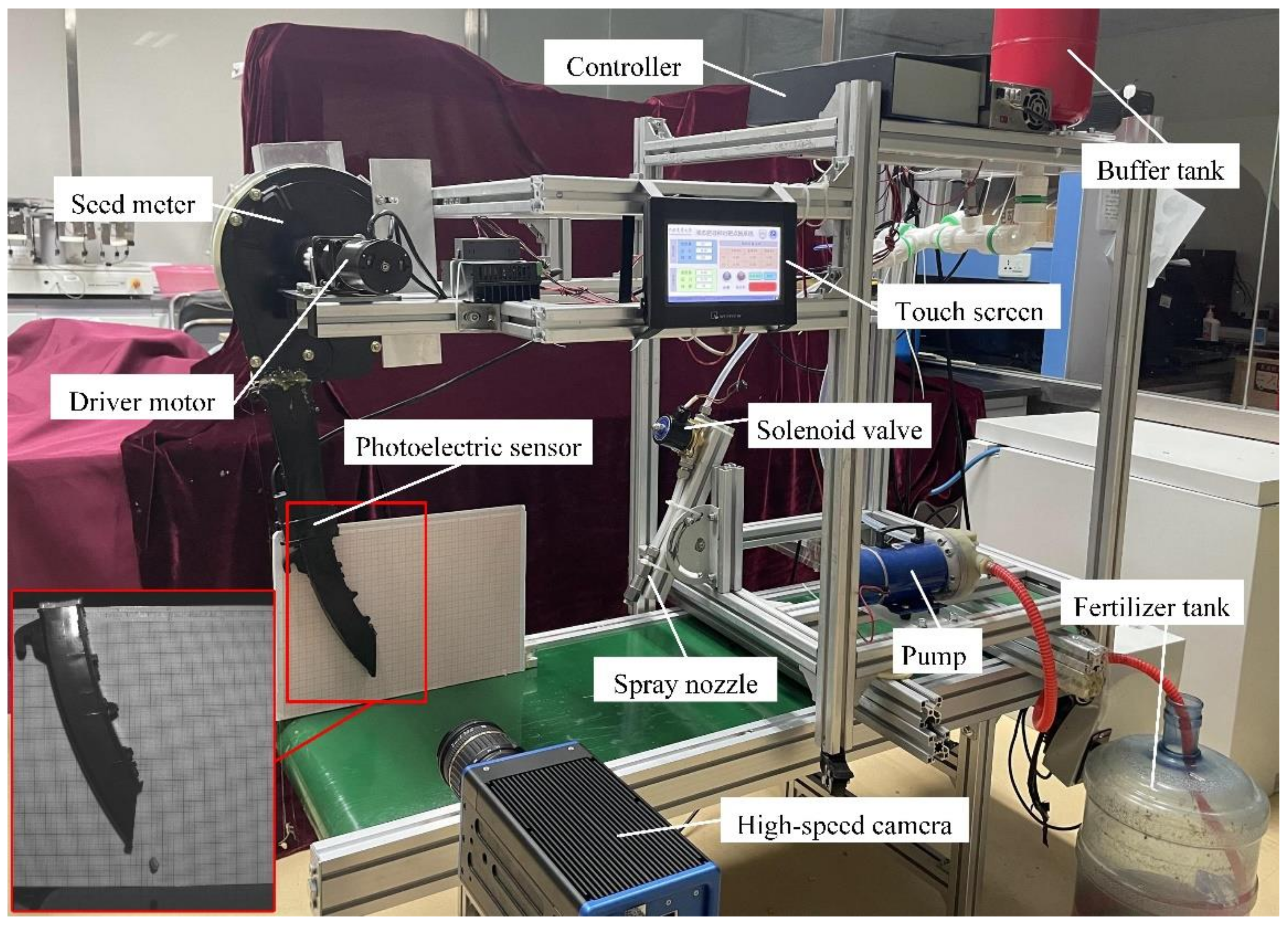
2.3.1. Test Arrangement
2.3.2. Test Conditions and Indexes
2.3.3. Statistical Analysis
3. Results and Discussion
3.1. Calibration of the Duration of Applying Liquid Starter Fertilizer to Every Seed
3.2. Determination of the Falling Time and Position of Seeds
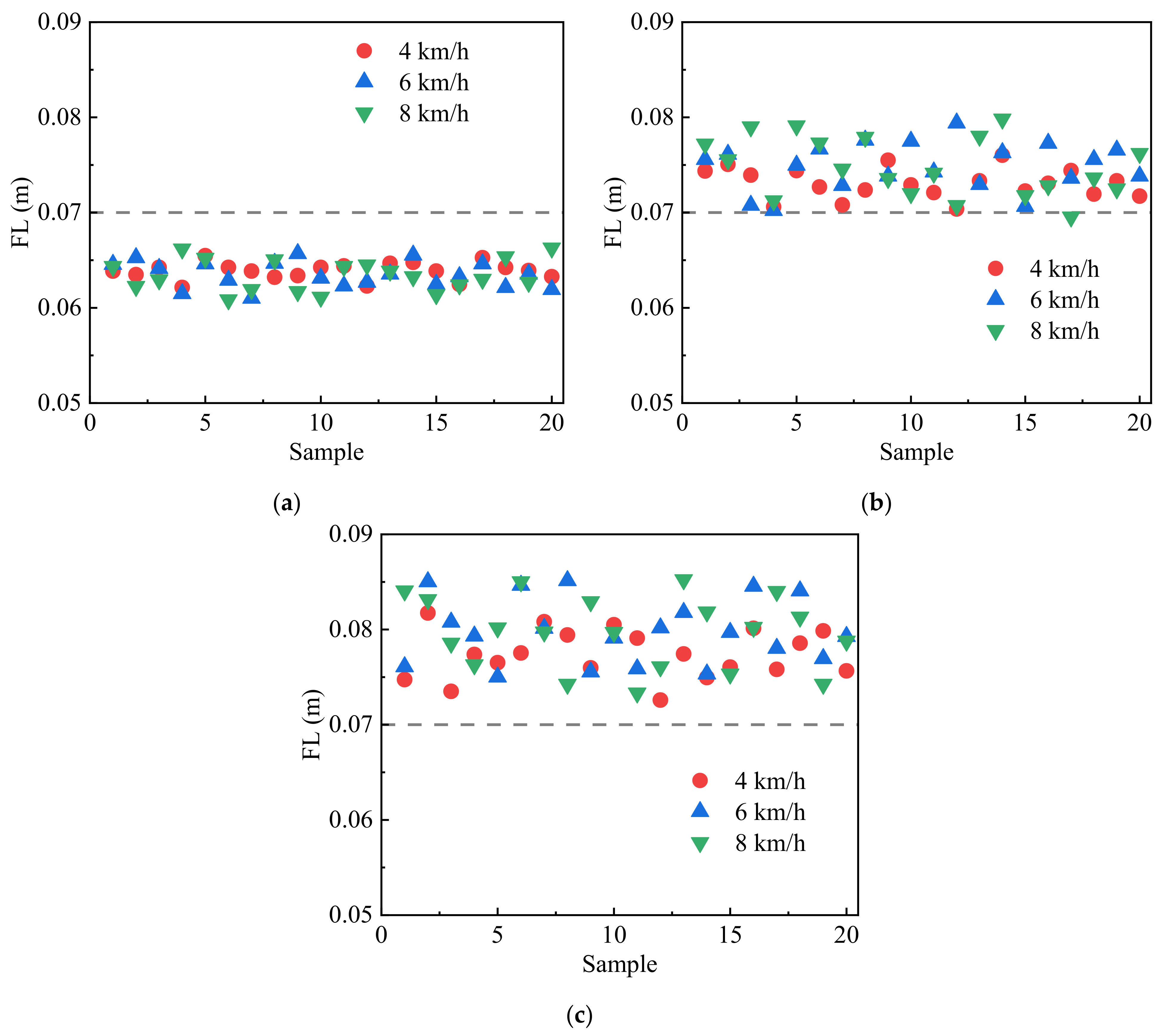
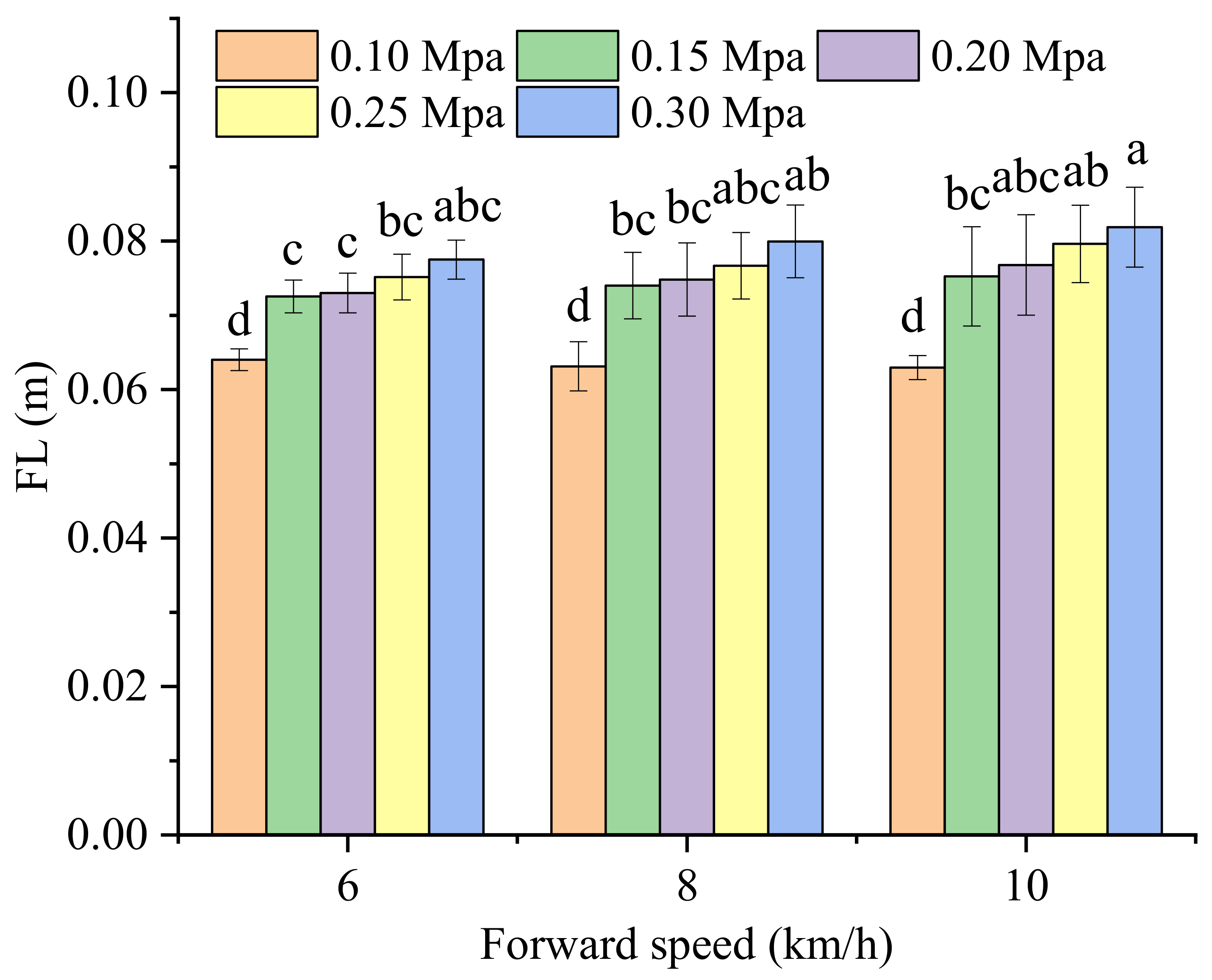
3.3. Length of Liquid Starter Fertilizer
3.4. Amount of Liquid Starter Fertilizer
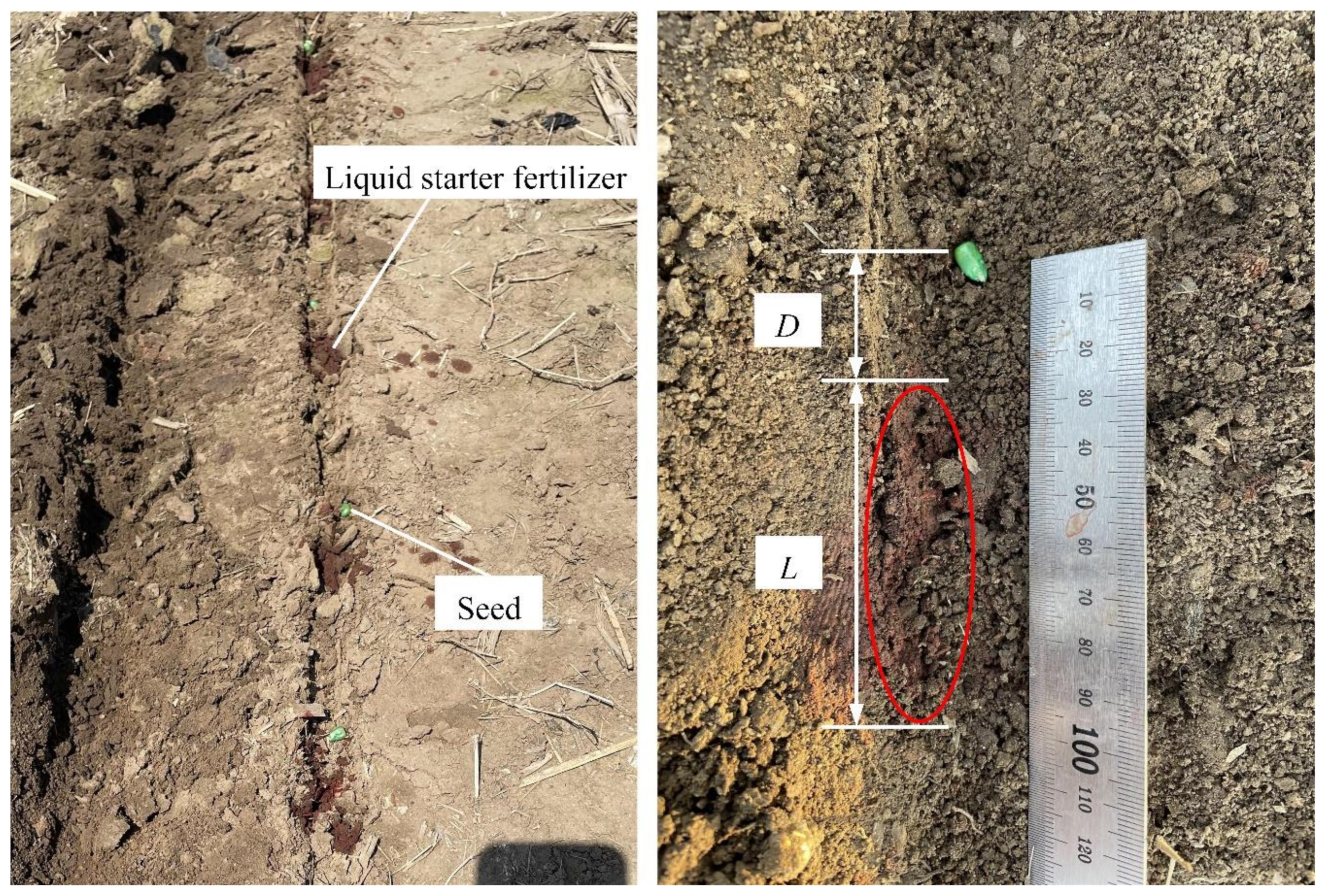
3.5. Distance between the Seeds and Liquid Starter Fertilizer
3.6. Comprehensive Analysis
4. Conclusions
- (1)
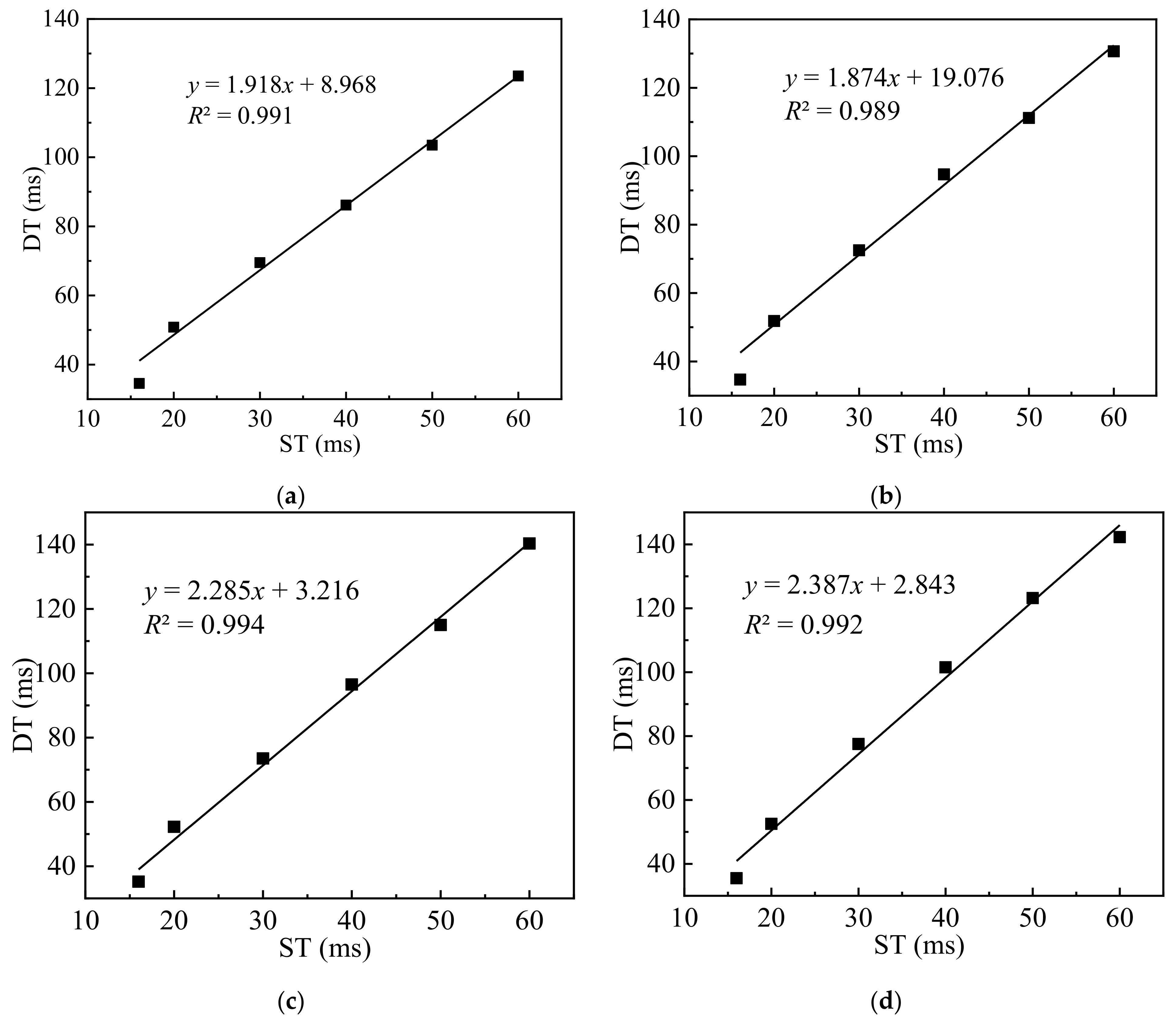
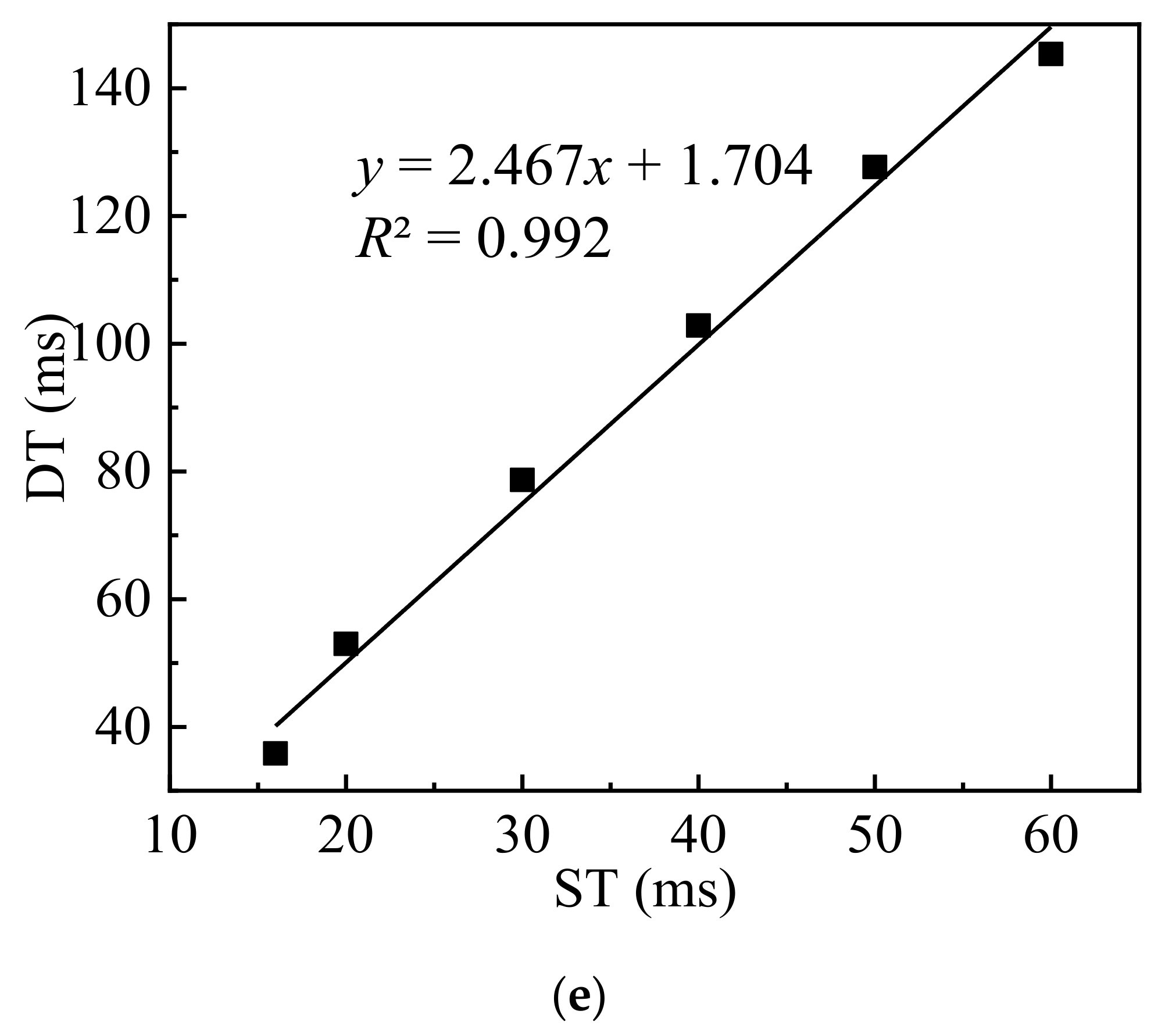
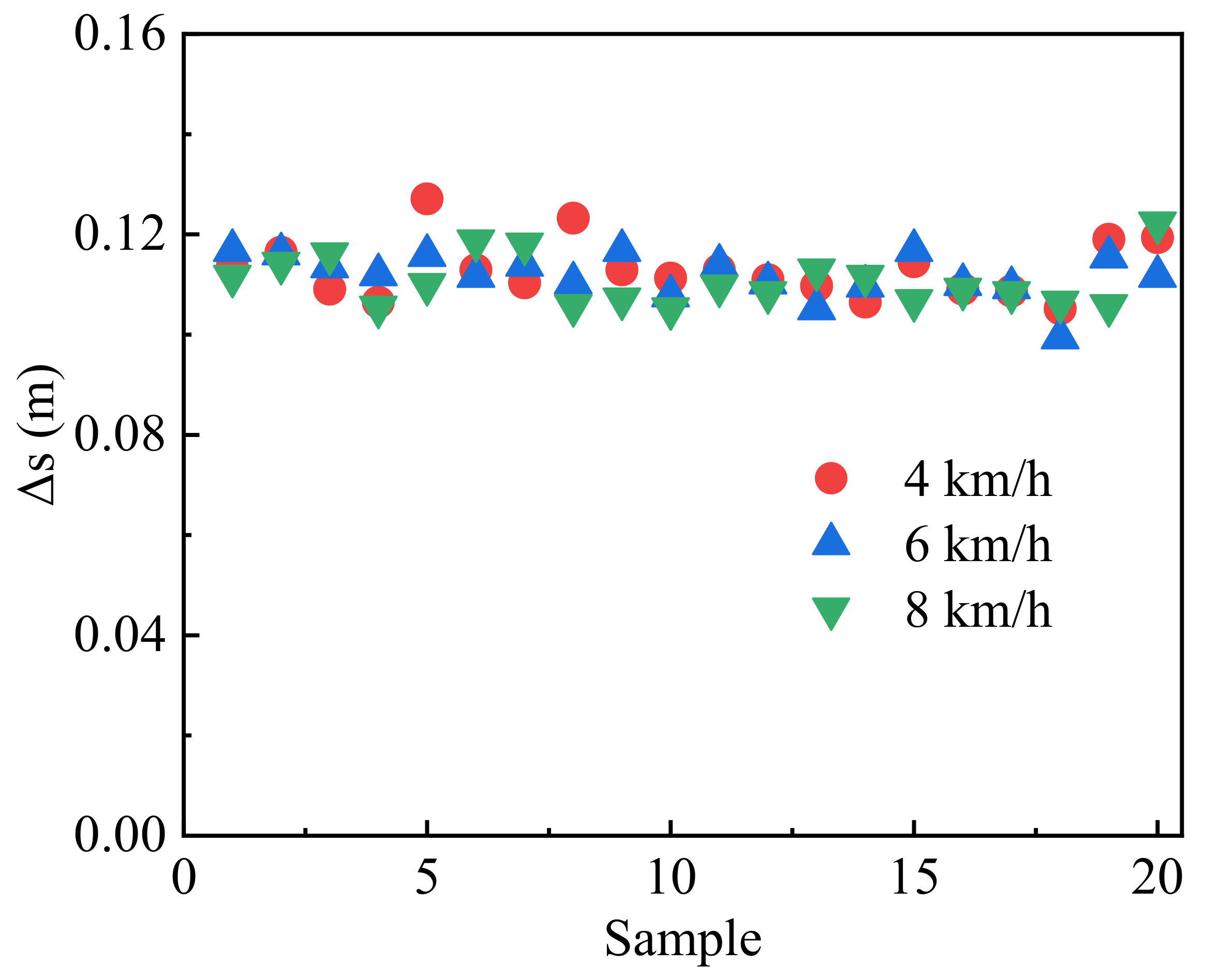
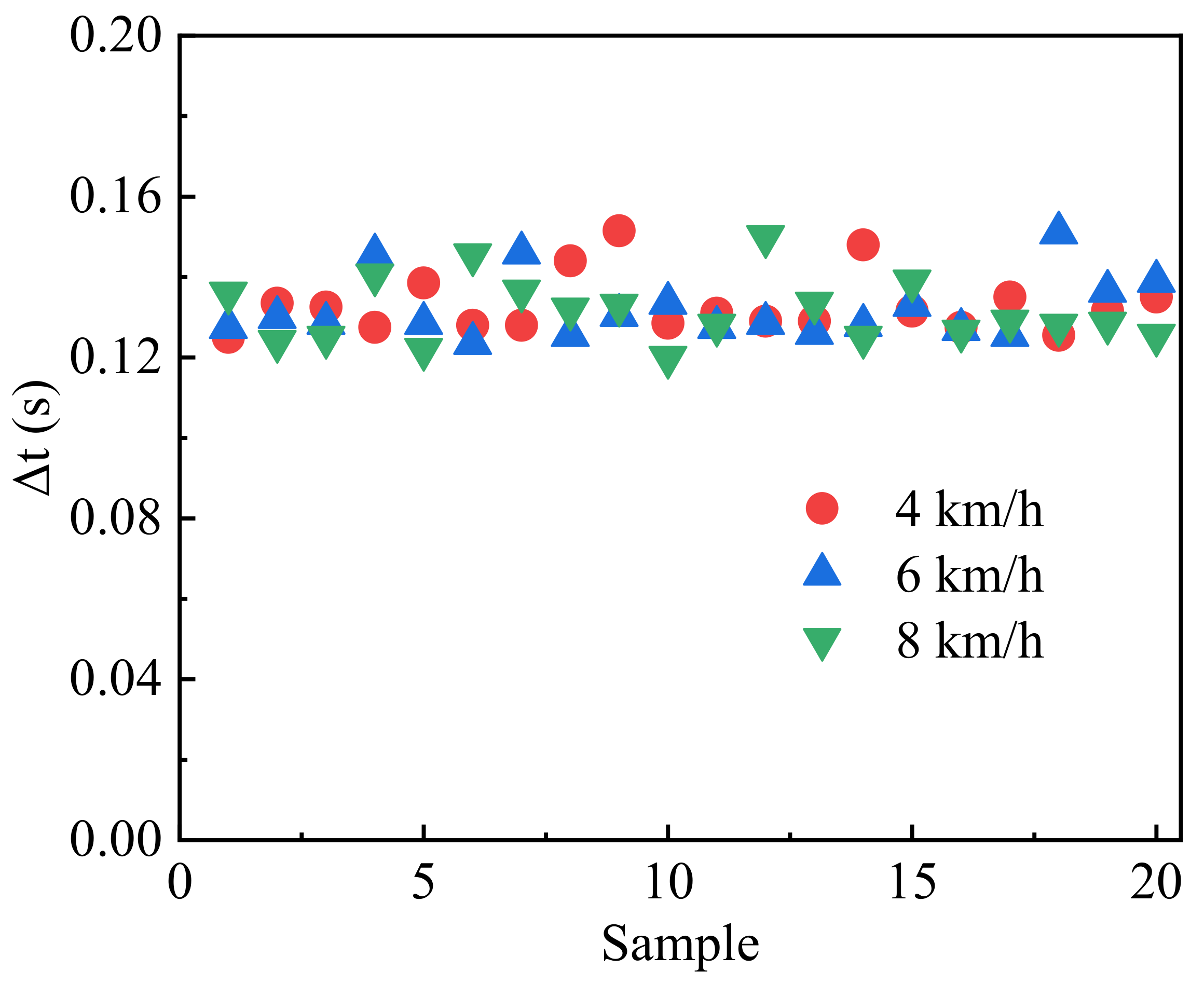
- DT and ST had a positive correlation. The minimum and maximum DT were 34.5 and 145.3 ms, respectively. Fitted equations were obtained at different pressures, and degrees of fit were greater than 0.989. The slopes of fitted equations were 1.918, 1.874, 2.285, 2.387, and 2.467 for P 0.10, P 0.15, P 0.20, P 0.25, and P 0.30, respectively. Different forward speeds simulated by the seed meter were not significantly different for Δt and Δs in the bench tests. The Δs and Δt were determined as 0.112 m and 0.132 s, respectively.
- (2)
- The results of the field experiments indicated that the precision application system for a LSF had higher QIL when the pressure was 0.15 MPa and 0.20 MPa at three forward speeds. The P 0.10, P 0.25, and P 0.30 treatment led to worse QIL values, especially P 0.30. The highest QIL was 96.4% at the forward speed of 6 km/h and pressure of 0.15 MPa, close to the target FL value. FL was significantly affected by the forward speed (p < 0.05) and pressure (p < 0.01). The distribution uniformity of FL was worse with increasing pressure and forward speed. A more uniform distribution of FL was obtained at lower pressure and forward speed.
- (3)
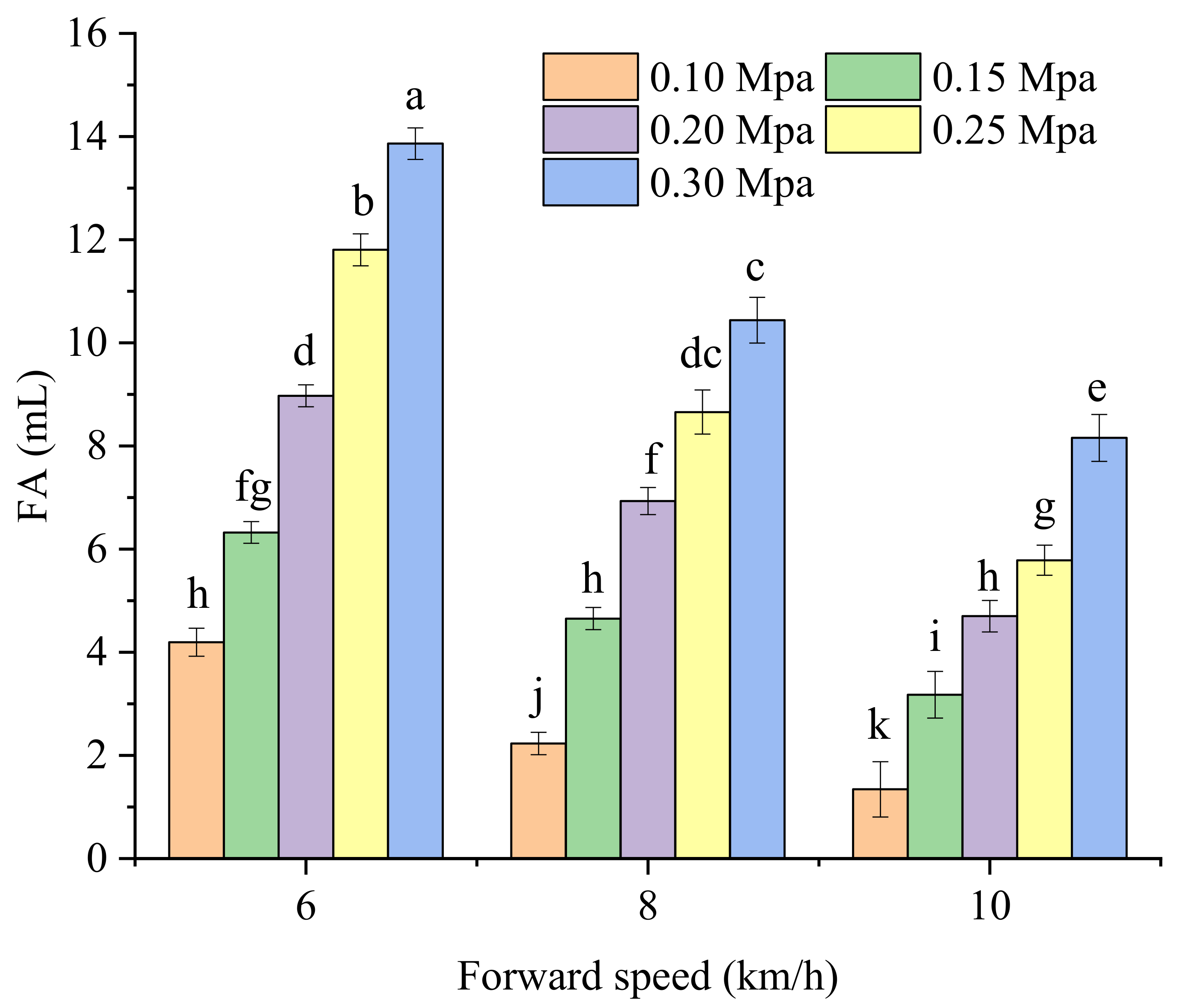
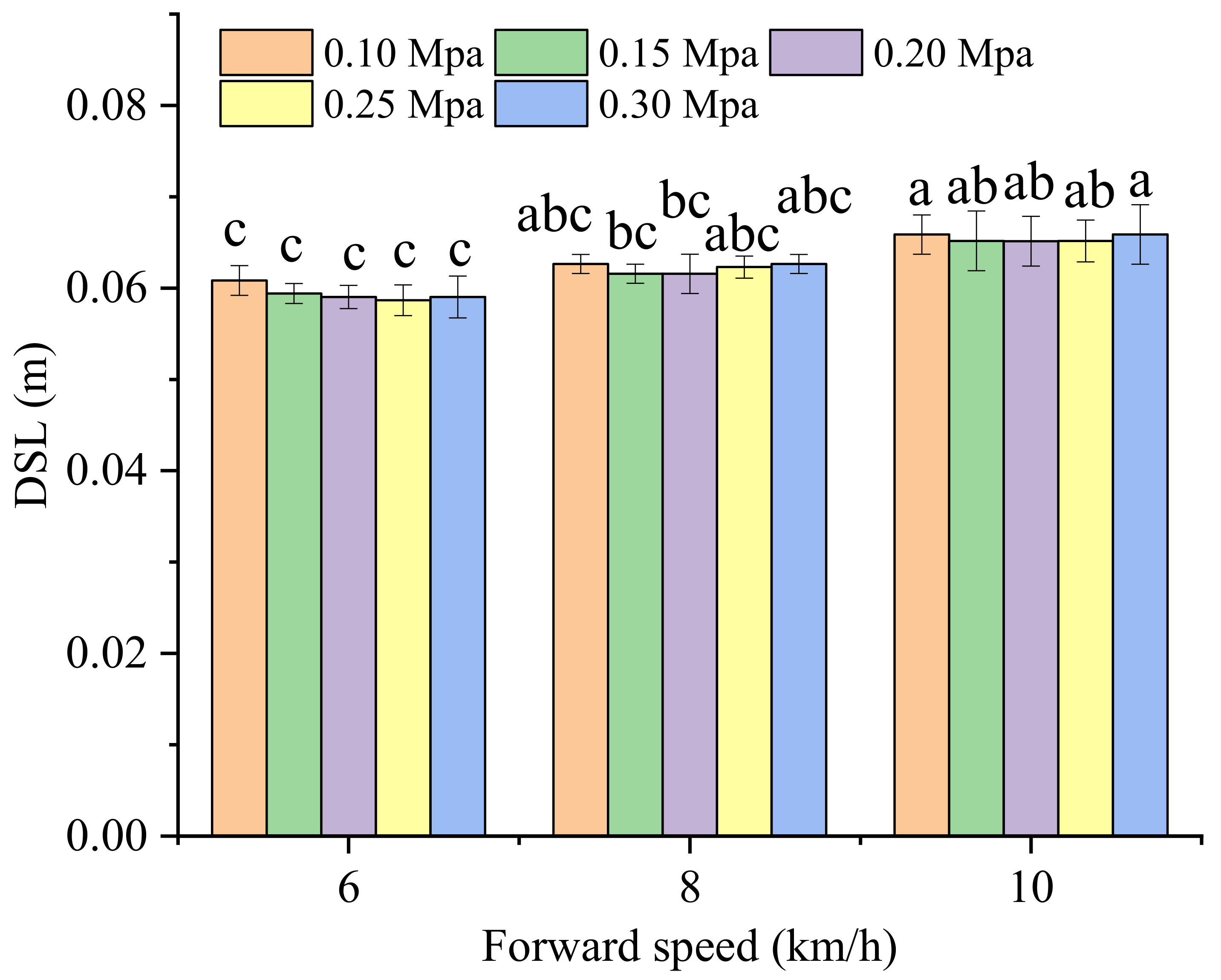
- FA was significantly affected by the pressure and forward speed (p < 0.01). The range of FA was 1.34 to 13.86 mL at different treatments, which could satisfy the demands of different conditions. QID showed a decreasing trend as the forward speed increased and did not obviously change with the change in pressure. The best QID of 82.6% was obtained when the pressure was 0.25 MPa and the forward speed was 4 km/h. DSF was significantly affected by the forward speed (p < 0.01) and the pressure did not significantly affect DSF it (p > 0.05).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Parent, S.É.; Dossou-Yovo, W.; Ziadi, N.; Leblanc, M.; Tremblay, G.; Pellerin, A.; Parent, L.E. Corn response to banded phosphorus fertilizers with or without manure application in Eastern Canada. Agron. J. 2020, 112, 2176–2187. [Google Scholar] [CrossRef]
- Kablan, L.A.; Chabot, V.; Mailloux, A.; Bouchard, M.È.; Fontaine, D.; Bruulsema, T. Variability in corn yield response to nitrogen fertilizer in eastern Canada. Agron. J. 2017, 109, 2231–2242. [Google Scholar] [CrossRef] [Green Version]
- Scharf, P.C.; Wiebold, W.J.; Lory, J.A. Corn yield response to nitrogen fertilizer timing and deficiency level. Agron. J. 2002, 94, 435–441. [Google Scholar] [CrossRef]
- Prasad, R. Efficient fertilizer use: The key to food security and better environment. J. Trop. Agric. 2009, 47, 1–17. [Google Scholar]
- Stewart, W.M.; Roberts, T.L. Food security and the role of fertilizer in supporting it. Procedia Eng. 2012, 46, 76–82. [Google Scholar] [CrossRef] [Green Version]
- Massah, J.; Azadegan, B. Effect of chemical fertilizers on soil compaction and degradation. Agric. Mech. Asia Afr. Lat. Am. 2016, 47, 44–50. [Google Scholar]
- Dimkpa, C.O.; Fugice, J.; Singh, U.; Lewis, T.D. Development of fertilizers for enhanced nitrogen use efficiency–Trends and perspectives. Sci. Total Environ. 2020, 731, 139113. [Google Scholar] [CrossRef]
- Kim, S.; Dale, B.E. Effects of nitrogen fertilizer application on greenhouse gas emissions and economics of corn production. Environ. Sci. Technol. 2008, 42, 6028–6033. [Google Scholar] [CrossRef]
- Savci, S. An agricultural pollutant: Chemical fertilizer. Int. J. Environ. Sci. Dev. 2012, 3, 73. [Google Scholar] [CrossRef] [Green Version]
- Bermudez, M.; Mallarino, A.P. Yield and early growth responses to starter fertilizer in no-till corn assessed with precision agriculture technologies. Agron. J. 2002, 94, 1024–1033. [Google Scholar] [CrossRef] [Green Version]
- Galpottage Dona, W.H.; Schoenau, J.J.; King, T. Effect of starter fertilizer in seed-row on emergence, biomass and nutrient uptake by six pulse crops grown under controlled environment conditions. J. Plant Nutr. 2020, 43, 879–895. [Google Scholar] [CrossRef]
- Mallarino, A.P.; Bergmann, N.; Kaiser, D.E. Corn responses to in-furrow phosphorus and potassium starter fertilizer applications. Agron. J. 2011, 103, 685–694. [Google Scholar] [CrossRef]
- Kaiser, D.E.; Mallarino, A.P.; Bermudez, M. Corn grain yield, early growth, and early nutrient uptake as affected by broadcast and in-furrow starter fertilization. Agron. J. 2005, 97, 620–626. [Google Scholar] [CrossRef]
- Quinn, D.J.; Lee, C.D.; Poffenbarger, H.J. Corn yield response to sub-surface banded starter fertilizer in the US: A meta-analysis. Field Crops Res. 2020, 254, 107834. [Google Scholar] [CrossRef]
- Kaiser, D.E.; Coulter, J.A.; Vetsch, J.A. Corn hybrid response to in-furrow starter fertilizer as affected by planting date. Agron. J. 2016, 108, 2493–2501. [Google Scholar] [CrossRef]
- Niehues, B.J.; Lamond, R.E.; Godsey, C.B.; Olsen, C.J. Starter nitrogen fertilizer management for continuous no-till corn production. Agron. J. 2004, 96, 1412–1418. [Google Scholar] [CrossRef]
- Da Silva, M.J.; Magalhães, P.G. Modeling and design of an injection dosing system for site-specific management using liquid fertilizer. Precis. Agric. 2019, 20, 649–662. [Google Scholar] [CrossRef]
- Kasal, E.Y.; Thakare, S.K.; Deshmukh, M.M. Development and laboratory optimization of liquid fertilizer application system. Int. J. Trop. Agric. 2015, 33, 3783–3787. [Google Scholar]
- Yu, C.; Wang, Q.; He, J.; Li, H.; Lu, C.; Liu, Z. Development of spraying device for precise and deep application of liquid fertilizer in sowing period. Trans. Chin. Soc. Agric. Eng. 2019, 35, 50–59. [Google Scholar]
- Lebeau, F.; El Bahir, L.; Destain, M.F.; Kinnaert, M.; Hanus, R. Improvement of spray deposit homogeneity using a PWM spray controller to compensate horizontal boom speed variations. Comput. Electron. Agric. 2004, 43, 149–161. [Google Scholar] [CrossRef]
- Anand, K.; Jayakumar, C.; Muthu, M.; Amirneni, S. Automatic drip irrigation system using fuzzy logic and mobile technology. In Proceedings of the 2015 IEEE Technological Innovation in ICT for Agriculture and Rural Development (TIAR), Chennai, India, 10–12 July 2015. [Google Scholar]
- Awati, J.S.; Patil, V.S. Automatic Irrigation Control by using wireless sensor networks. J. Exclus. Manag. Sci. 2012, 1, 1–7. [Google Scholar]
- Dixit, J.; Mahal, J.S.; Manes, G.S. Design of nitrogen (Liquid Urea) metering mechanism for point injection in straw mulched fields. AMA-Agric. Mech. Asia Afr. Lat. Am. 2016, 47, 28–35. [Google Scholar]
- Da Silva, M.J.; Franco, H.C.J.; Magalhães, P.S.G. Liquid fertilizer application to ratoon cane using a soil punching method. Soil Tillage Res. 2017, 165, 279–285. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, W.; Li, X.; Feng, J.; Jiang, D.; Wang, J. Design and experiment of variable speed picking hole mechanism for Oval and circular gear planetary system. Trans. Chin. Soc. Agric. Mach. 2018, 49, 136–142. [Google Scholar]
- Drazic, M.; Gligorevic, K.; Pajic, M.; Zlatanovic, I.; Spalevic, V.; Sestras, P.; Skataric, G.; Dudic, B. The Influence of the Application Technique and Amount of Liquid Starter Fertilizer on Corn Yield. Agriculture 2020, 10, 347. [Google Scholar] [CrossRef]
- Alameen, A.A.; Al-Gaadi, K.A.; Tola, E. Development and performance evaluation of a control system for variable rate granular fertilizer application. Comput. Electron. Agric. 2019, 160, 31–39. [Google Scholar] [CrossRef]
- Reyes, J.F.; Esquivel, W.; Cifuentes, D.; Ortega, R. Field testing of an automatic control system for variable rate fertilizer application. Comput. Electron. Agric. 2015, 113, 260–265. [Google Scholar] [CrossRef]
- Maleki, M.R.; Mouazen, A.M.; De Ketelaere, B.; Ramon, H.; De Baerdemaeker, J. On-the-go variable-rate phosphorus fertilisation based on a visible and near-infrared soil sensor. Biosyst. Eng. 2008, 99, 35–46. [Google Scholar] [CrossRef]
- Ehlert, D.; Schmerler, J.; Voelker, U. Variable rate nitrogen fertilisation of winter wheat based on a crop density sensor. Precis. Agric. 2004, 5, 263–273. [Google Scholar] [CrossRef]
- Taghizadeh, M.; Ghaffari, A.; Najafi, F. Modeling and identification of a solenoid valve for PWM control applications. Comptes Rendus Mec. 2009, 337, 131–140. [Google Scholar] [CrossRef]
- Xu, X.; Han, X.; Liu, Y.; Liu, Y.; Liu, Y. Modeling and dynamic analysis on the direct operating solenoid valve for improving the performance of the shifting control system. Appl. Sci. 2017, 7, 1266. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Wang, X.; Yang, S.; Zhao, X.; Dou, H.; Zhao, C. Design and test of pneumatic downforce control system for planting. Trans. Chin. Soc. Agric. Mach. 2019, 50, 19–29. [Google Scholar]
- He, X.; Cui, T.; Zhang, D.; Wei, J.; Wang, M.; Yu, Y.; Liu, Q.; Yan, B.; Zhao, D.; Yang, L. Development of an electric-driven control system for a precision planter based on a closed-loop PID algorithm. Comput. Electron. Agric. 2017, 136, 184–192. [Google Scholar] [CrossRef]
- Yu, C.; Li, H.; He, J.; Chen, G.; Lu, C.; Wang, Q.L. Design and Experiment of High-frequency Intermittent Fertilizer Supply System Based on PID Algorithm. Trans. Chin. Soc. Agric. Mach. 2020, 51, 45–53. [Google Scholar]
- Karayel, D.; Wiesehoff, M.; Özmerzi, A.; Müller, J. Laboratory measurement of seed drill seed spacing and velocity of fall of seeds using high-speed camera system. Comput. Electron. Agric. 2006, 50, 89–96. [Google Scholar] [CrossRef]
- Zhan, Z.; Yaoming, L.; Jin, C.; Lizhang, X. Numerical analysis and laboratory testing of seed spacing uniformity performance for vacuum-cylinder precision seeder. Biosyst. Eng. 2010, 106, 344–351. [Google Scholar] [CrossRef]
- Yan, B.; Fu, W.; Wu, G.; Xiao, Y.; Meng, Z. Seed location prediction method of maize high-height precision planting based on satellite positioning. Trans. Chin. Soc. Agric. Mach. 2021, 52, 44–54. [Google Scholar]
- Wang, J.; Liu, Y.; Wang, J.; He, J. Optimization design and experiment of liquid-fertilizer applying deep-fertilization mechanism for planetary elliptic gears. Trans. Chin. Soc. Agric. Mach. 2012, 43, 59–60. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fertilizer Pressure | Mean Values of DT (ms) | |||||
|---|---|---|---|---|---|---|
| ST 16 | ST 20 | ST 30 | ST 40 | ST 50 | ST 60 | |
| P 0.10 | 34.5 | 50.8 | 69.5 | 86.2 | 103.5 | 123.5 |
| P 0.15 | 34.7 | 51.8 | 72.5 | 94.7 | 111.2 | 130.7 |
| P 0.20 | 35.2 | 52.3 | 73.5 | 96.5 | 115.0 | 140.3 |
| P 0.25 | 35.5 | 52.5 | 77.5 | 101.5 | 123.3 | 142.3 |
| P 0.30 | 35.8 | 53.0 | 78.5 | 102.8 | 127.7 | 145.3 |
| Forward Speed(km/h) | QIL (%) | QID (%) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| P 0.10 | P 0.15 | P 0.20 | P 0.25 | P 0.30 | P 0.10 | P 0.15 | P 0.20 | P 0.25 | P 0.30 | |
| 4 | 91.5 | 96.4 | 95.7 | 92.6 | 89.3 | 78.3 | 81.2 | 81.9 | 82.6 | 81.9 |
| 6 | 90.2 | 94.3 | 93.1 | 90.4 | 85.8 | 74.7 | 76.9 | 77.3 | 75.4 | 74.7 |
| 8 | 89.9 | 92.5 | 90.3 | 86.3 | 83.0 | 68.2 | 69.7 | 69.3 | 68.7 | 68.2 |
| FL | FA | DSL | ||||
|---|---|---|---|---|---|---|
| Sig. | Sig. | Sig. | ||||
| Forward speed | 0.049 | * | 0.000 | ** | 0.000 | ** |
| Pressure | 0.000 | ** | 0.000 | ** | 0.708 | ns |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, C.; Wang, Q.; Cao, X.; Wang, X.; Jiang, S.; Gong, S. Development and Performance Evaluation of a Precise Application System for Liquid Starter Fertilizer while Sowing Maize. Actuators 2021, 10, 221. https://doi.org/10.3390/act10090221
Yu C, Wang Q, Cao X, Wang X, Jiang S, Gong S. Development and Performance Evaluation of a Precise Application System for Liquid Starter Fertilizer while Sowing Maize. Actuators. 2021; 10(9):221. https://doi.org/10.3390/act10090221
Chicago/Turabian StyleYu, Changchang, Qingjie Wang, Xinpeng Cao, Xiuhong Wang, Shan Jiang, and Shaojun Gong. 2021. "Development and Performance Evaluation of a Precise Application System for Liquid Starter Fertilizer while Sowing Maize" Actuators 10, no. 9: 221. https://doi.org/10.3390/act10090221
APA StyleYu, C., Wang, Q., Cao, X., Wang, X., Jiang, S., & Gong, S. (2021). Development and Performance Evaluation of a Precise Application System for Liquid Starter Fertilizer while Sowing Maize. Actuators, 10(9), 221. https://doi.org/10.3390/act10090221