3.1. Reference Design, Parameters and Manufacturing
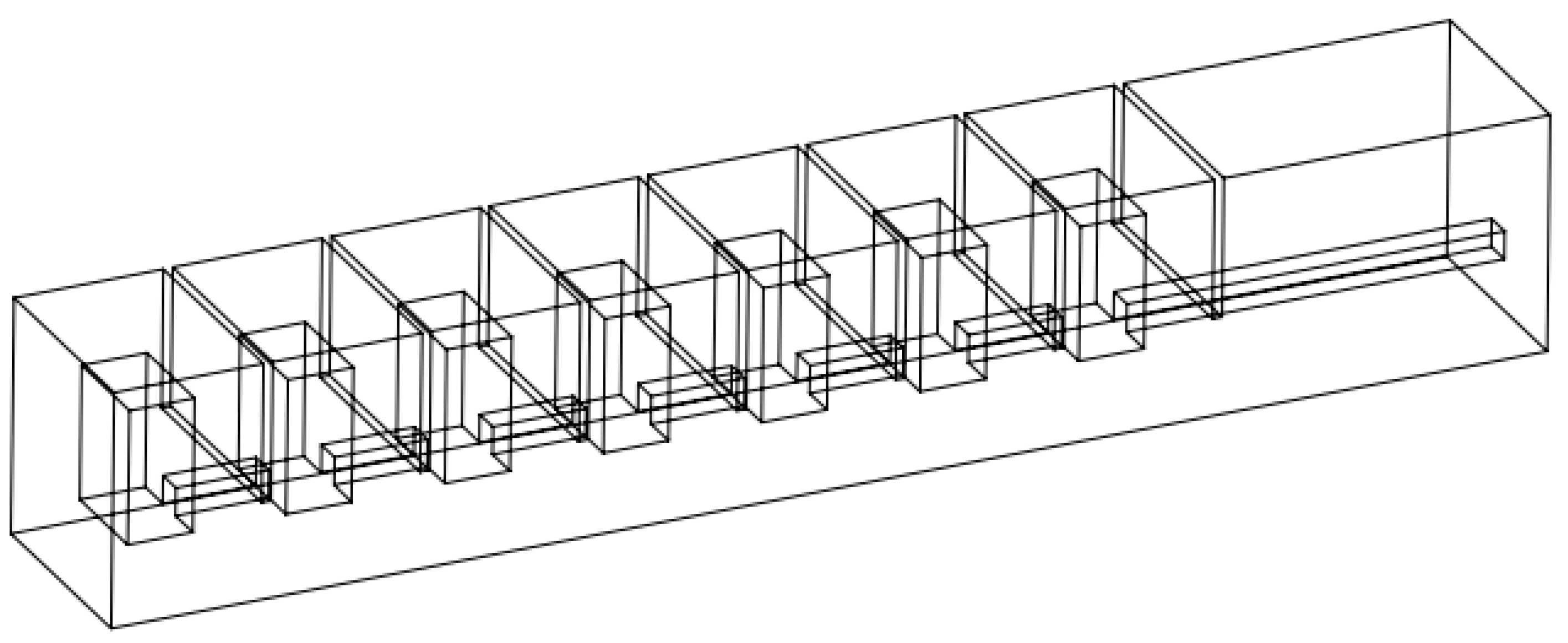
To define a mathematical model, the physical phenomenon must be clearly defined as a grounding reference. The specific type of soft actuator analyzed in this study was a multi-chamber pneumatic soft actuator, meaning that its source of motion is entirely powered by air pressure. Its body is divided into multiple segments that are almost independent from one another. Even though they are powered by the same energy source, the effects of each chamber are determined only by the geometrical design with which they were manufactured. This leads to an individual study of each chamber, later to be interpreted as their effects on the system.
By minimizing the spacing between each chamber and resorting to a design containing seven active segments, pronounced flexion is ensured even at small relative pressures and perceivable chamber deformations. This proves beneficial from an informative point of view since results will be defined in a way that is easily distinguishable, providing ease in the formulation of eventual conclusions.
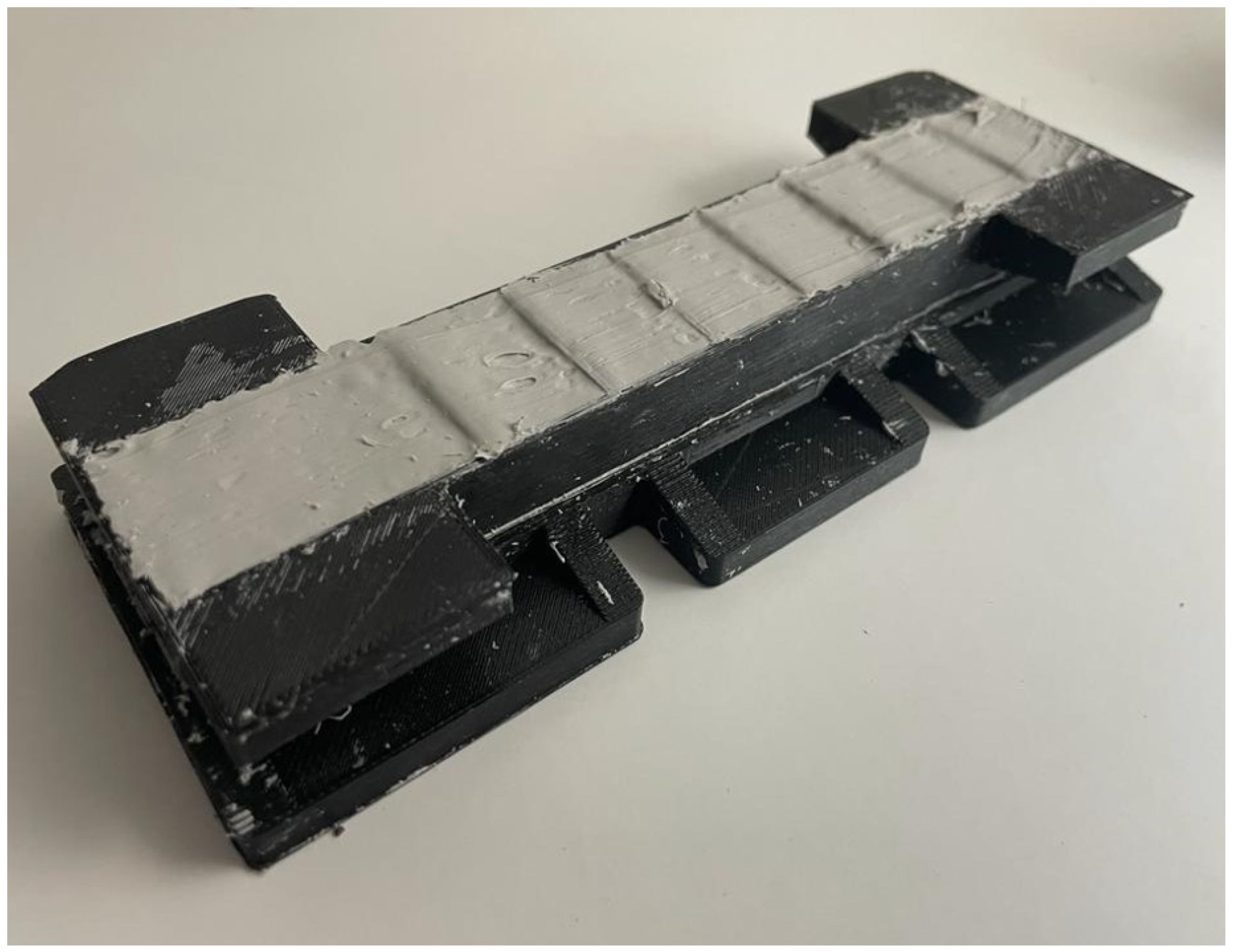
The design that was tested and validated throughout this study is presented in
Figure 2, portraying its external and internal composition.
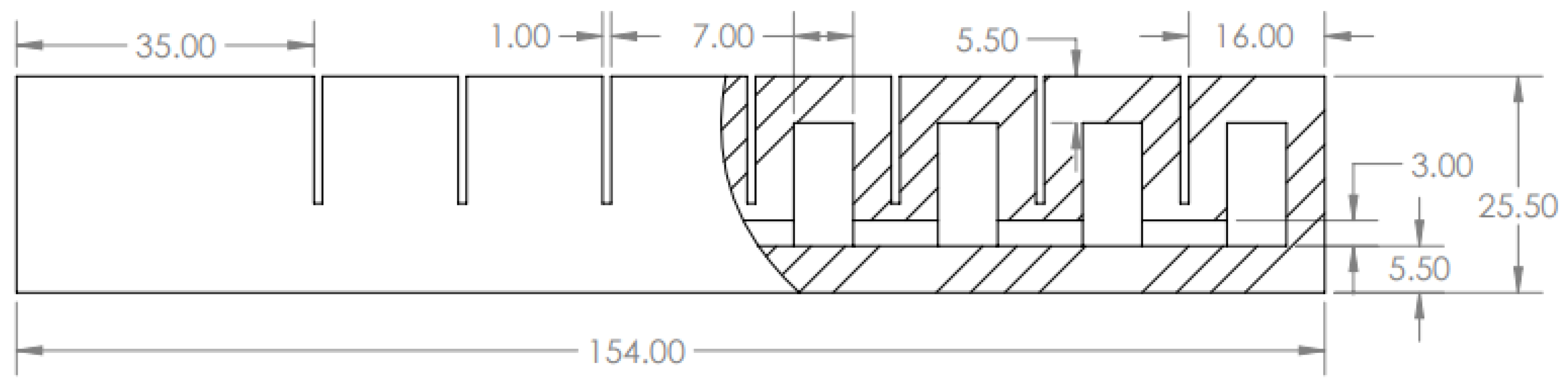
All the design parameters relevant to the mathematical model are described in
Figure 3. These specific values were used to create a comparison between a real actuator and a prediction based on the mathematical model. Both the external part and the broken out section cut are presented.
The methodology offers a model that can be utilized with conventional actuators; with each measurement taken as an average from most common designs used industrially and for research purposes.
To manufacture the actuator’s component, an elastomer with hyper-elastic properties was selected. Given several factors, such as its elevated deformation coefficient, its cost and availability as well as its notorious resistance towards external piercing forces, ABRO GREY 999 RTV Silicone Gasket Maker was selected as the actuators body. Due to the models used to calculate elastic deformations, a shear modulus of only 18 GPa is required.
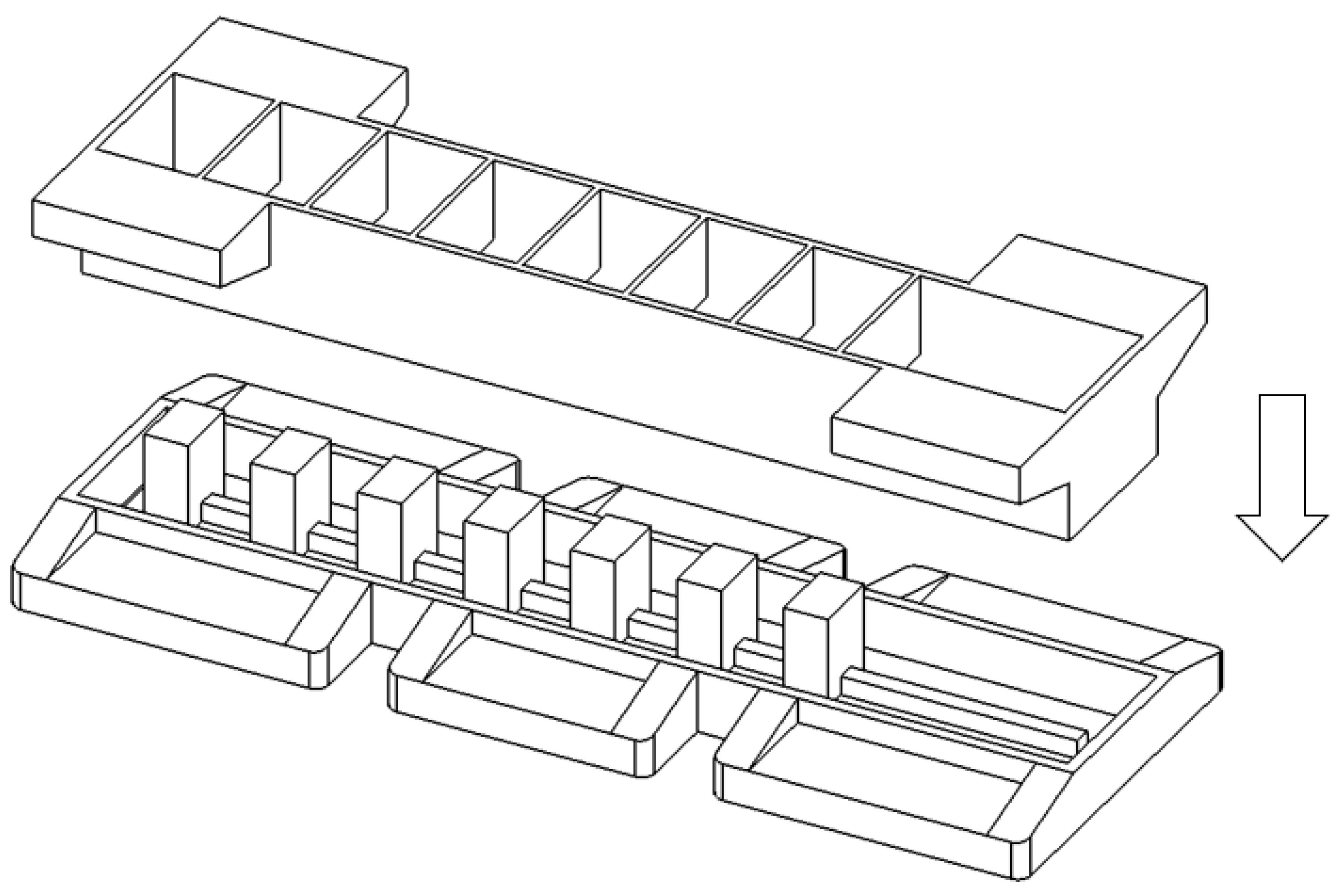
The entire process defines a multi-step traditional molding.
Figure 4 presents both molds used to manufacture the body, only accounting for the chamber cavities and external separations.
After assembling both pieces, the material is poured, taking caution to avoid air bubbles because they affect the composition as a whole or can create air leaks which render the actuator nonfunctional. Due to the material’s properties, it is cured at room temperature across a period of 4 days to ensure its proper finishing.
Figure 5 illustrates a fully cured actuator body ready to be released from its mold.
Once the body is removed from the mold, additional material is poured on a flat surface where the body will be laid on. The first layer of the base must be thin as to avoid clogging the main distribution channel. Curing time is 30 min for this step. A coupling method or direct source of distribution for air pressure should be introduced simultaneously making use of the materials own properties to create a seal. Addition at a later time could ultimately result in air leaks.
A layer of flexible but inelastic material should be applied at the latest layer of base material as an elongation limitation. More material poured over the inelastic layer creates an outer homogeneous composition and ensures the layers coupling towards the rest of the body. Multiple components can be manufactured and attached to a rigid assembly to finalize a proper functional actuator presented in
Figure 6 in a three component configuration over an industrial robot for a pick and place task.
3.2. Analysis of Pressure and Deformation
Defined by the specific requirements for utilizing hyper-elastic materials, methods available to dictate its behavior apply a systems energy as a basis. Taking energy as a major variable and considering only states of equilibrium, the theorem of virtual work serves as an anchor point for the mathematical model where defines the input work and establishes the effected work.
The following equation verifies how the energy input from an external source determines every aspect of the end condition.
Establishing a general input dependent on the pressure, the use of a characteristic equation between Energy W, pressure P and volumetric dilatation is given.
Its clear how the systems relation between its volume and pressure is imperative for the calculation of energy. Initial and current states in the volume serve as limits defining compression or expansion. Given the expansion in any conventional use of a multi-chamber soft pneumatic actuator, the expected results always yield positive results.
Considering air’s behavior as an ideal spring in the presence of a change in pressure, a perfect ratio is assumed between the theoretical volumes given a constant air flow. This characteristic provides a simple relationship between the pressure and added air volume, granting a dependent function able to replace the general pressure term.
Solving the integral for the dependent pressure, the following equation is obtained.
AS a constant volumetric air flow is assumed in this study, the formula is adapted where the final volume of the system is equivalent to an initial volume and the volumetric flow rate Q multiplied by the time interval.
Because the experimental results were obtained using an air compressor as a source, volumetric flow is considered constant and can be controlled through mechanical means. Given the interaction through diverse pneumatic components through a control system the value to be utilized is that present directly within the actuator.
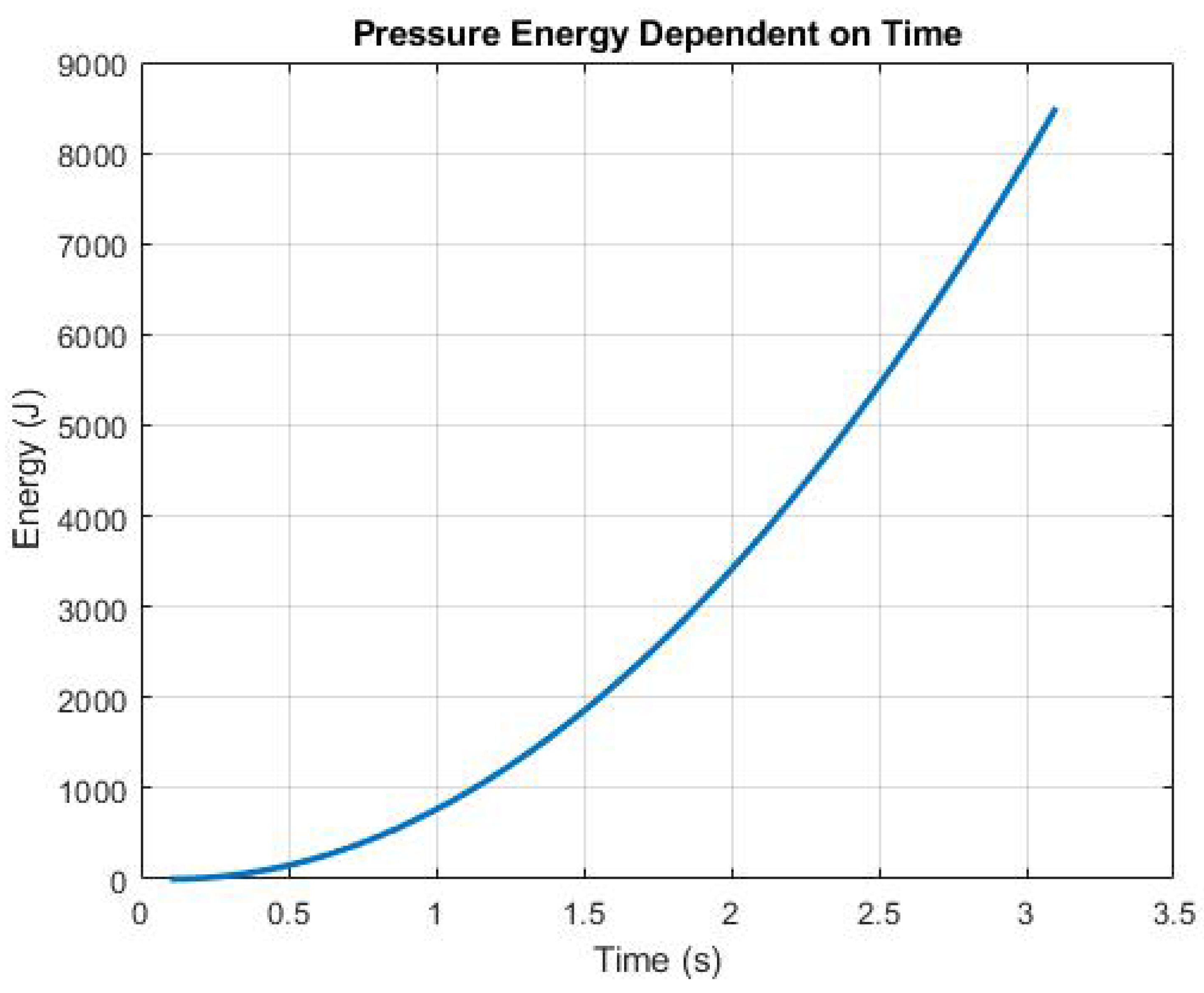
Given the linear dependency towards volumetric change, the integral presents a quadratic equation expressing the relation to the system’s energy. Analyzing the equation across a temporal interval,
Figure 7 is plotted. It describes a simple parabola limited to its positive representation for the work effected, which is considered as a deformation caused by expansion.
Having a complete method to determine the energy input depending on a pneumatic source, its effects over the elastic body need to be interpreted. As hyper-elastic materials do not obey the traditional law of Hooke for linear elasticity, a different method must be employed. Several models exist with differing approximation percentages, but in this specific analysis the Neo-Hookean model was applied.
Approaching its representation through means of linear algebra, defining forces applied in three dimensions to the three basic planes of reference, a concrete approximation is given. The Neo-Hookean model considers material properties based on its proportion to the shear modulus and leaves deformation relations in the form of a scalar representation .
The secondary term of the Neo-Hookean model applies only to compressible materials. The use of a strictly hyper-elastic material leads to a generalization of a universal incompressible characteristic. In any case, the Jacobian J belonging to the gradient of deformation will always equal to 1, reducing the term to 0.
The leading equation is presented.
The term
dictates the deformation as a scalar, considering several directions and magnitudes of forces over a specific body. To determine
the trace operation must be performed over the left Cauchy-Green deformation tensor. The square matrix denoting the Deformation Gradient, where everything is derived, is presented in a general form.
The general deformation gradient matrix defines three vectors describing the Euclidean planes. Each vector is associated with the directional forces. This expression is capable of describing multiple stresses indistinctly from their respective directions. Given the predictable behaviour of a soft actuator’s pneumatic chamber, a generalization can be made.
Several forces can be analyzed, but establishing a uni-axial deformation for the lateral walls of the actuator can simplify this matrix into a single diagonal dependent only on a single variable defining a relation of deformation
from an original length.
The left Cauchy-Green deformation tensor was easily obtained by applying a matrix multiplication operation to the deformation gradient. Because the simplified matrix is only defined as a diagonal matrix, the result is the square of each individual component. Applying the trace operation; is the sum of the diagonal’s values.
The resolution for
using the uni-axial deformation consideration is given in the following expression.
Substituting the new definition for
, an expression for energy through a dependent variable denoting deformation, is given. The equation can be rewritten as a cubic formula where the most prominent variable is the relation of deformation
. The variable for energy was substituted by a conventional
W to portray its relation to the initially calculated input energy.
The solution for this equation is obtained by applying Cardano’s method for cubic equations. The main condition before using Cardano’s method is the existence of a depressed cubic equation which is already present. For problems denoting only one or two real answers, the main formula can be applied directly; however, when confronted with an equation with three interception points, the discriminants of the square roots within the method are negative. To solve this problem, the imaginary part of each segment must be expressed directly, and each term is represented as a vector containing both imaginary and real parts. To simplify further expressions, two transition variables are introduced.
The transitory term
T portrays the section of Cardano’s method within a square root but is multiplied by −1 as the imaginary term
i is extracted from the root. This serves as a basis to calculate the magnitudes and angles for imaginary vectors. The angle portraying the imaginary vector
is determined through the previously stated term
T and a constant −1 found through the parameters of the initial cubic equation and those found in Cardano’s method. Because the arcsin function does not discern between which value is negative, a shift of 180 degrees is necessary to calculate the true angle, which is always expected to be in the second quadrant.
Each vector is separated into its components through trigonometric functions multiplied by its calculated magnitude. In view of the fact that a cubic root is still applied, the magnitude is affected directly through a radical function and the argument of the trigonometric functions is simply divided by three.
Owing to the composition of the initial formula, after applying a cubic root to both vectors, their sum is in the form of conjugates; thus, all the imaginary parts are eliminated. The remaining terms are equivalent in view of the fact that square exponents are used in the calculation of magnitude simplifying the expression further. The resolution is presented.
3.3. Calculation of Displacement Caused by Geometrical Changes
Referring to multi-chamber pneumatic soft actuators, the main principle of motion is a physical push between the inflated chambers. Deformation of material and restriction at base sections, creates the need for flexion between segments. Considering previous calculations for material behavior, and the geometric composition of the actuator the displacement of its parts is easily associated.
Having a solution for the relation of deformation from the initial measurement of chamber height, an approximation of deformation was used. As the material elongates owing to the inner pressure, the lateral walls form an ellipsoidal shape centered on a critical point defined as the thinnest section of the wall. If the wall states a uniformly shaped figure, the critical points form at its midpoint.
The characteristic shape of the inflated walls is that of an ellipse; thus, Euler’s base approximation for an ellipse’s perimeter
P is used.
Taking into account the fact that the height of the chambers
L should remain constant thanks to the limitations of frontal and rear walls, one of the radii is taken as half the initial height. The other radius is called a lateral deformation
h, relating directly to the variable circumference dependent on twice the initial length multiplied by the relation of deformation
previously calculated. The inverse equation is shown with an error difference from the initial value taken into account for its an approximation.
Following the studies of J. Wang [
30] in a model for the behavior of a soft actuator, the formula of flexion for each segment is given. This equation depends on several design parameters such as the segment distancing
c and critical deformation point
b. The equation takes the lateral deformations as a dependent variable and the flexion angle as its independent variable.
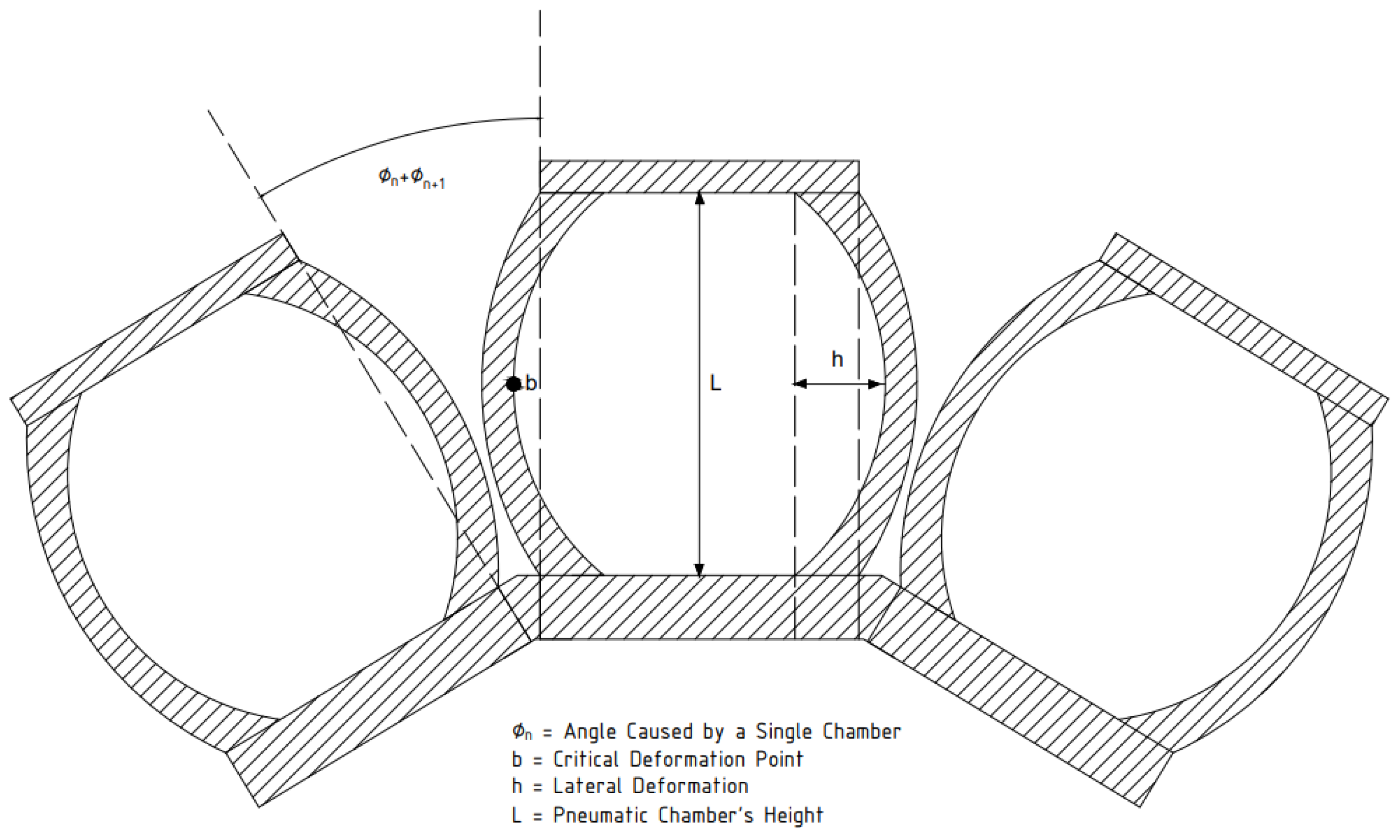
Figure 8 provides a graphic representation of the physical placements and definitions of each parameters used in the calculation of lateral deformations for individual chambers. Each chamber’s inner height is labeled as L, and h represents the lateral deformation or distance between the inner wall’s initial and situational position. The method used considers each wall’s effect separately to account for designs with variable geometries, and the complete flexion of a segment is given by the sum of its calculated angles.
Unfortunately, this takes the opposite approach to the objective of this study; therefore, an inverse function is necessary. By means of trigonometric identities and simple algebra, the result is that of a quartic equation dependent on
. Each coefficient is presented individually in the purpose of order.
To solve the equation, Ferrari’s method is applied, but its condition for use on depressed quartic equations is not fulfilled; therefore, variable substitution takes place in an effort to eliminate the coefficient corresponding to
.
After simplifying, the new equation is presented divided into its individual coefficients, once again as a way to preserve order.
Once the equation is ready, Ferrari’s method presents several transitional parameters to obtain the final result. The first parameter
is determined using the previously determined cubic formula. Congruence with this function ensures the applicability of further expressions.
Cardano’s method is once again the tool of preference for a cubic equation resolution, but the necessity of a depressed cubic equation brings the need for another variable substitution.
The final depressed cubic equation, which is now dependent on the variable
is presented.
Similar transition variables for Cardano’s method were employed to proceed in an orderly manner. Specifically, a term is used as a component in a vector for imaginary–real representation , and the angle between these components . The newly introduced terms and refer to the linear and independent coefficients of the previous equation, respectively.
Contrary to the obligatory use of these terms in previous implementations, they will only be used situationally when required.
Faced with uncertainty about the sign of the discriminant derived by the variation of possible combinations of variables, the necessity for a piece-wise equation is clear. Both the classic solution and the answer, achieved through a detour into complex mathematics, are stated dependent on the sign of the discriminant. The solution for
and thus a direct relation to
is achieved, where
will be a real answer to the initial equation. Even while all limits within the function exist, it fails in its continuity because there exists a point where it lacks a derivative where the boundary between domains lies.
After obtaining the variable
, the secondary transition parameter to be resolved is
which correlates directly.
The value of
must be chosen carefully so that the resulting secondary parameter permits a real answer, because of the use of square roots for the final solution of the initial quartic equation.
Using the previously stated substitution and the arcsin trigonometric function, a method is acquired to obtain the flexion of each segment of a soft actuator depending on its input pressure.
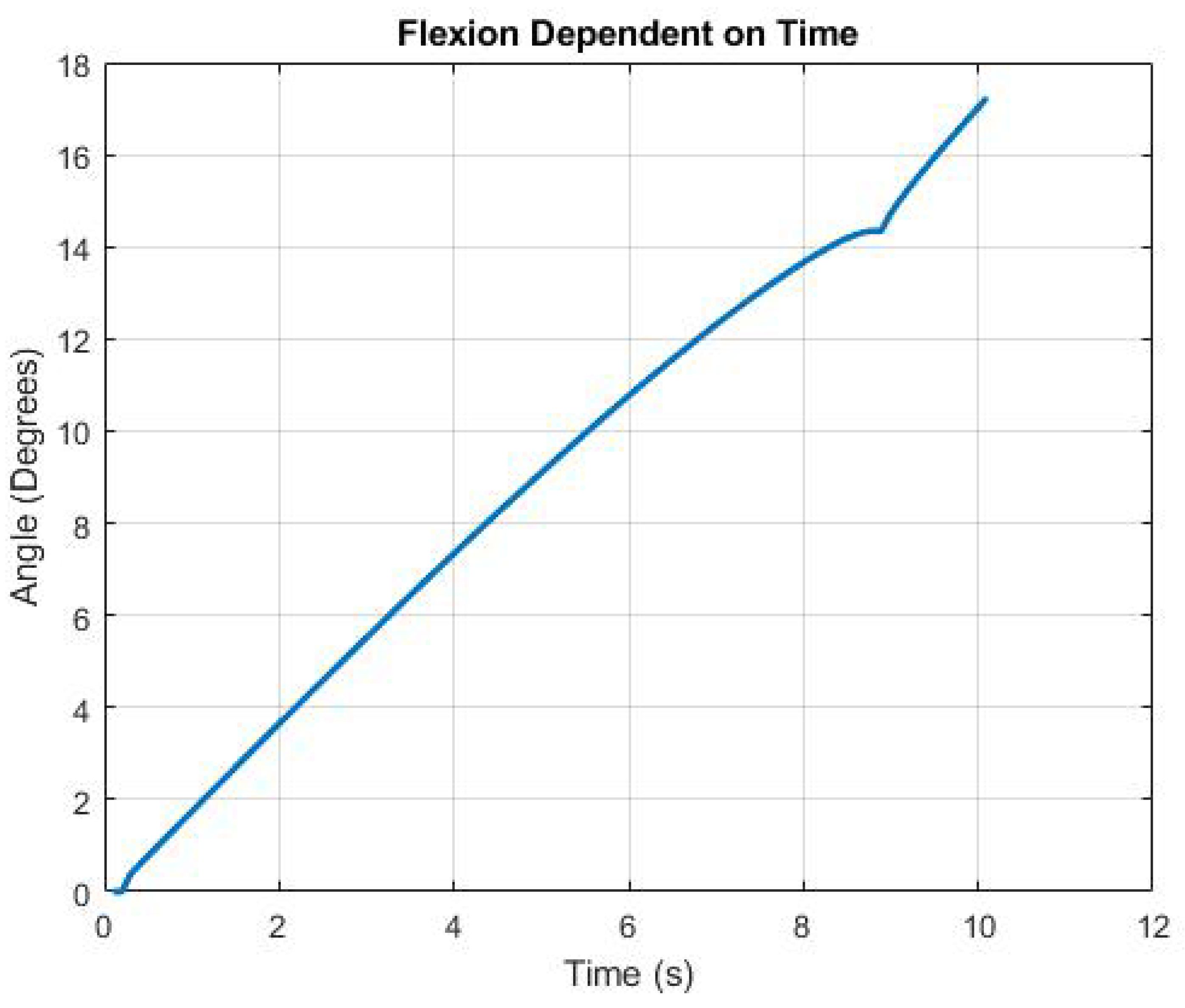
The graph presented in
Figure 9 shows a behavior granted by two radical equations with a clear inflection point. This is caused by the use of a piece-wise function to finalize the resolution of the quartic equation. Idealizing the system, the graph presents a steep continuous radical form, making this a close approximation with a small zone of poor effectiveness. The eventual curvature of the graph proves how the tension accumulated within the body of the actuator gradually prevents further displacement.
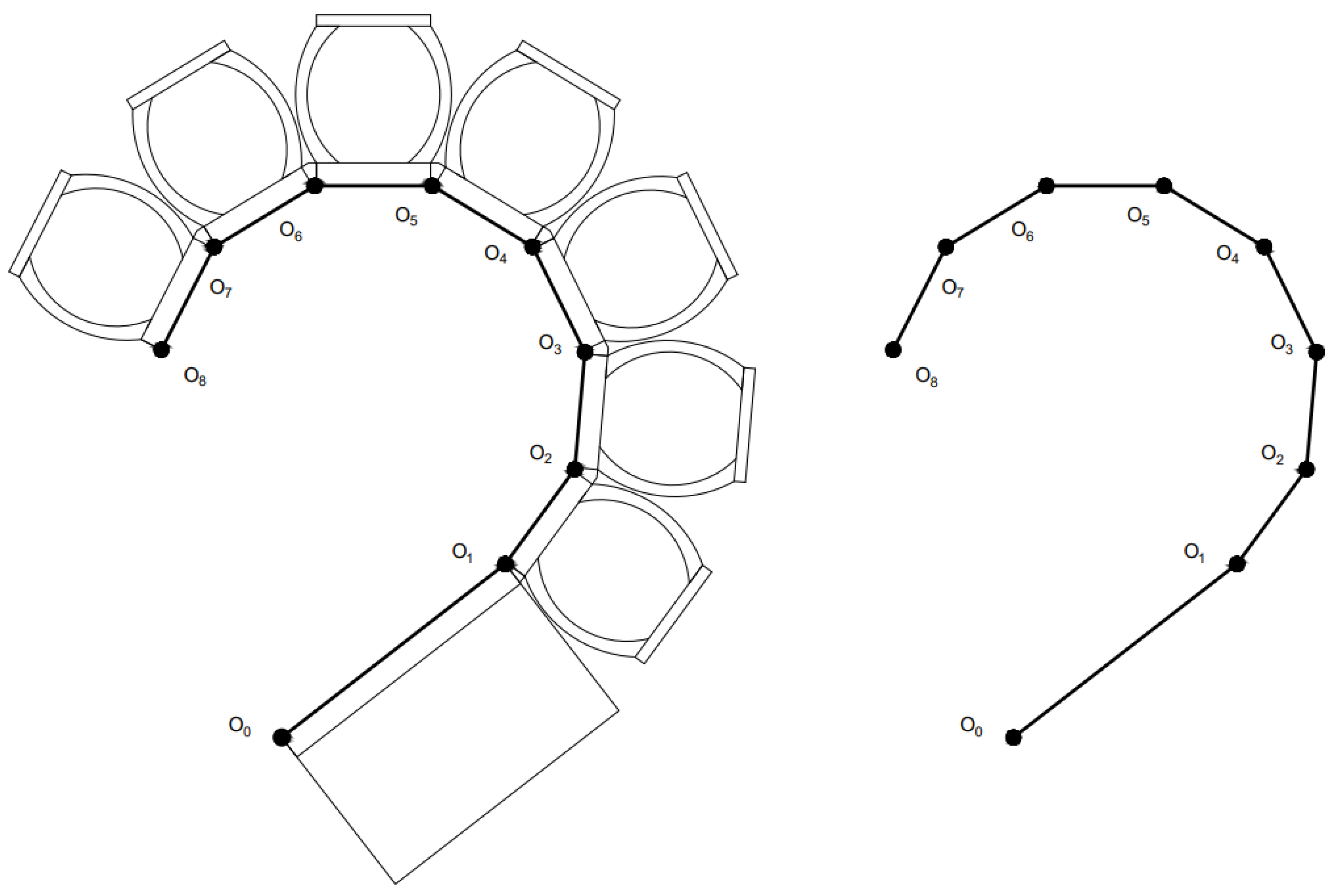
3.4. Angular Representation Using Linear Vectors
The representation of the actuator’s backbone curve is approached through a series of linear vectors
established in succession, depicting the magnitude and direction of each segment in concordance with the initial reference state. Each vector is composed of magnitude corresponding to segment length
and its global angle
dependent on both half angles
caused by adjacent pneumatic chambers.
The use of linear vectors is justified by the lack of change in particular segments accomplished by using conventional designs. The axis of rotation defined for each chamber was located at a midpoint of their length in separation. The design was further adjusted to this assumption, for it is the thinnest part of the body in a radial direction to the center point of its flexion. Because a requirement for the backbone curve is that its tangential vectors are always orthogonal to the transverse area and given that the base of the actuator will not suffer from longitudinal deformations, it was selected as the reference as shown in
Figure 10. Areas such as the top or center of inertia show troublesome results, because their magnitude is variable in view of the fact that they contain actively deforming parts or separating pieces.
Owing to the dependence of a previous segment to determine the position of the next one, the use of recursive equations is evident. The angles expressed beforehand are relative only to the study of individual chambers and thus must be introduced to a representation of the system as a whole. To calculate a global angle
from the initial reference, the previous iteration of global angle is to be summed to the effects of both half angles.
Once the direction and magnitude are obtained through design parameters such as segment length
, the remaining matter is the resolution of the origin points
for each vector. It comes naturally through another recursive equation dependent on the components of the previous origin point summed with the components of the last vector calculated using simple trigonometric functions.
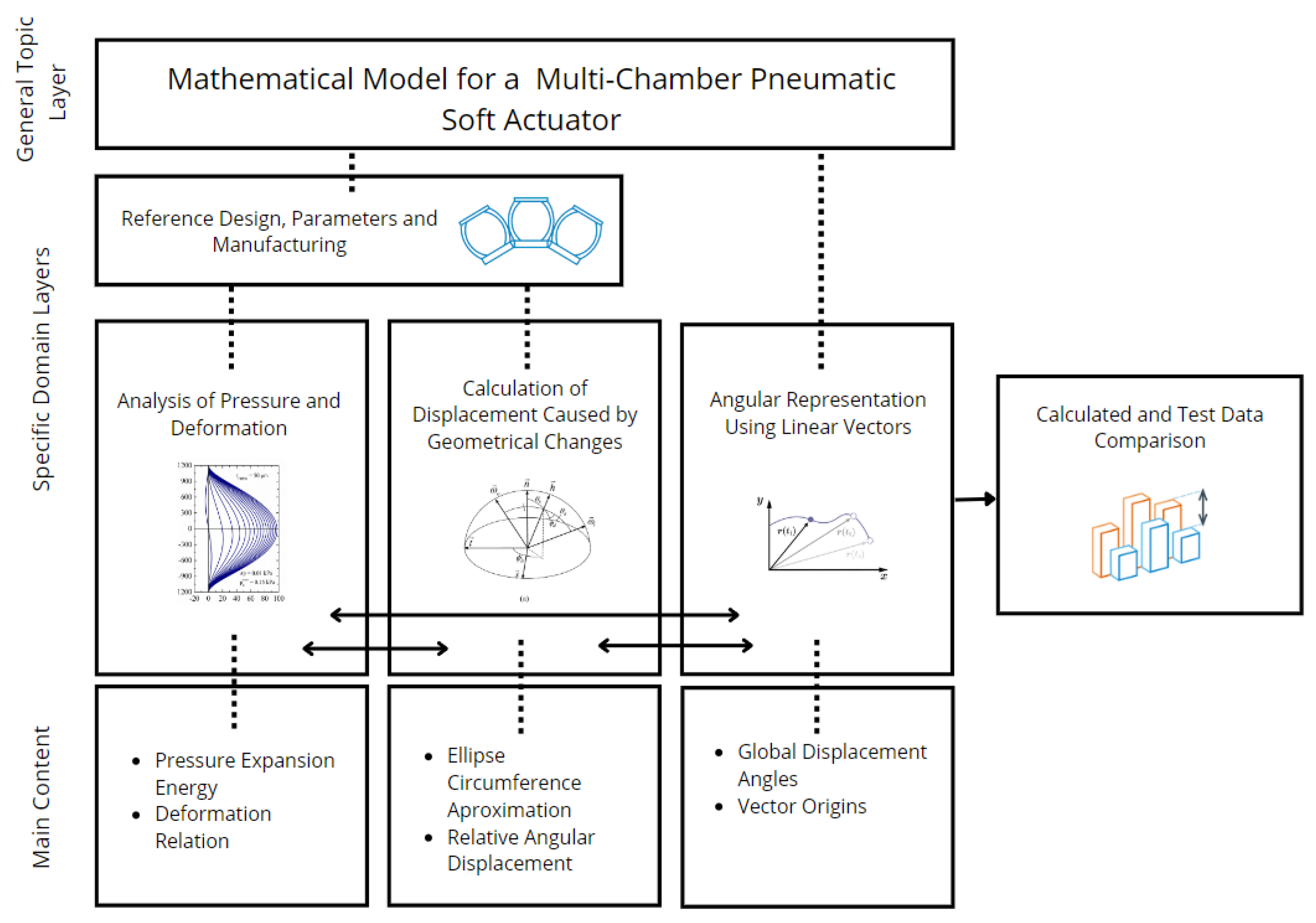
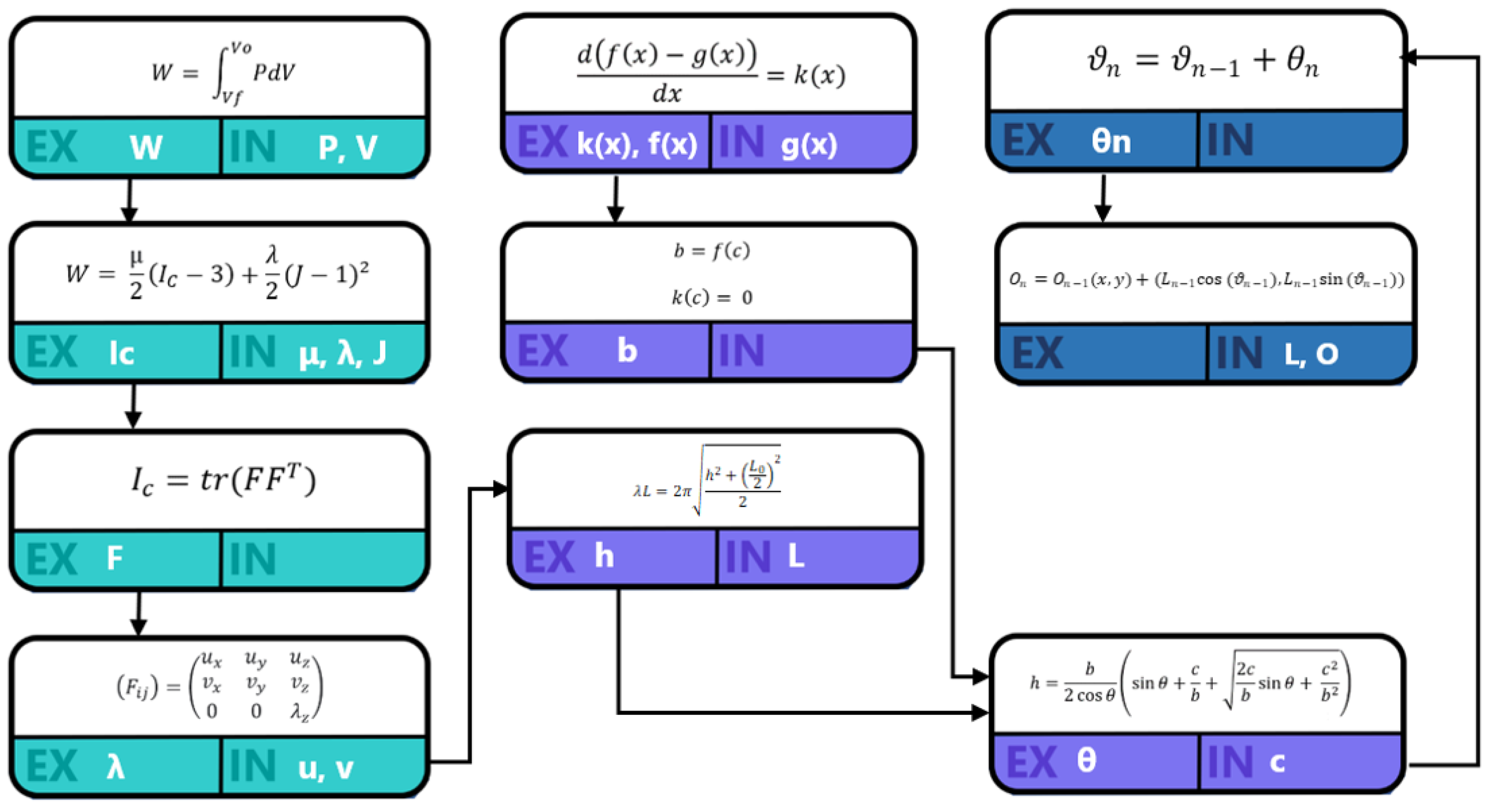
The connection of origin coordinates represent the backbone curve of the soft actuator located at its base in any given state dictated by the input pressure from the air flow source. The complete mathematical model can be summarized in
Figure 11 where the principal equations on their base form are presented and classified into their corresponding domain of analysis. The colors cyan, purple and blue correspond to the analysis of pressure, deformation and the calculation of displacement caused by geometrical changes and angular representation using linear vectors sections, respectively. The model starts from the energy source and finalizes on a vectorial representation, granting graphic results.
3.5. Calculated and Test Data Comparison
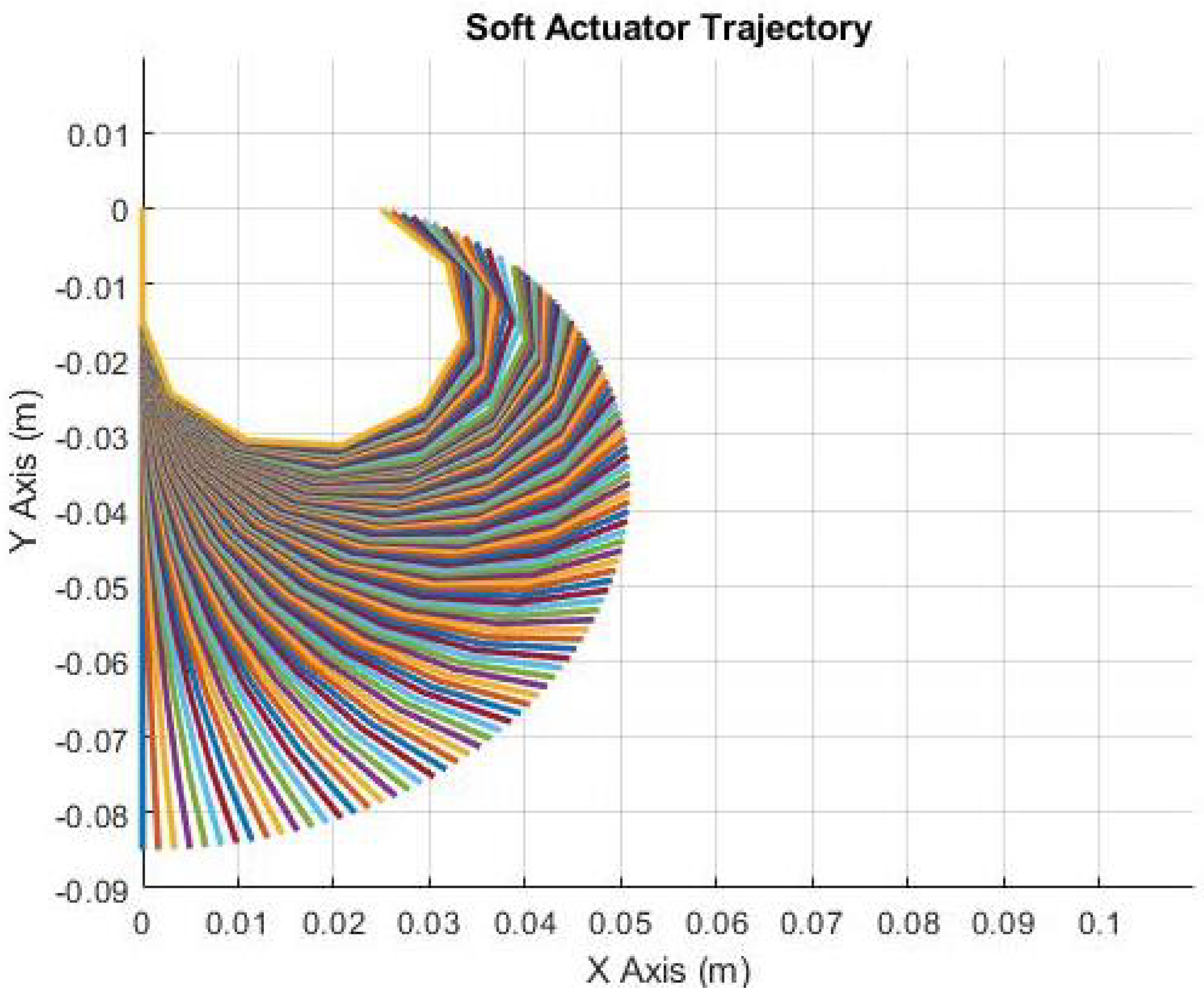
As time passes, the internal volume increases and the segment angles become more pronounced.
Figure 12 presents different positions separated by 0.1 s in time. Even though each result is given at a uniformly spaced interval, it is clear that the initial plots are more physically separated. Later graphs are almost presented superimposed over each other. Although the energy source adapts to satisfy a constant volumetric flow, the flexion of the actuator depends on the ellipsoidal interaction between the chambers. At higher lateral deformations, less of the actual segments will be in contact, thus slowing its angular velocity.
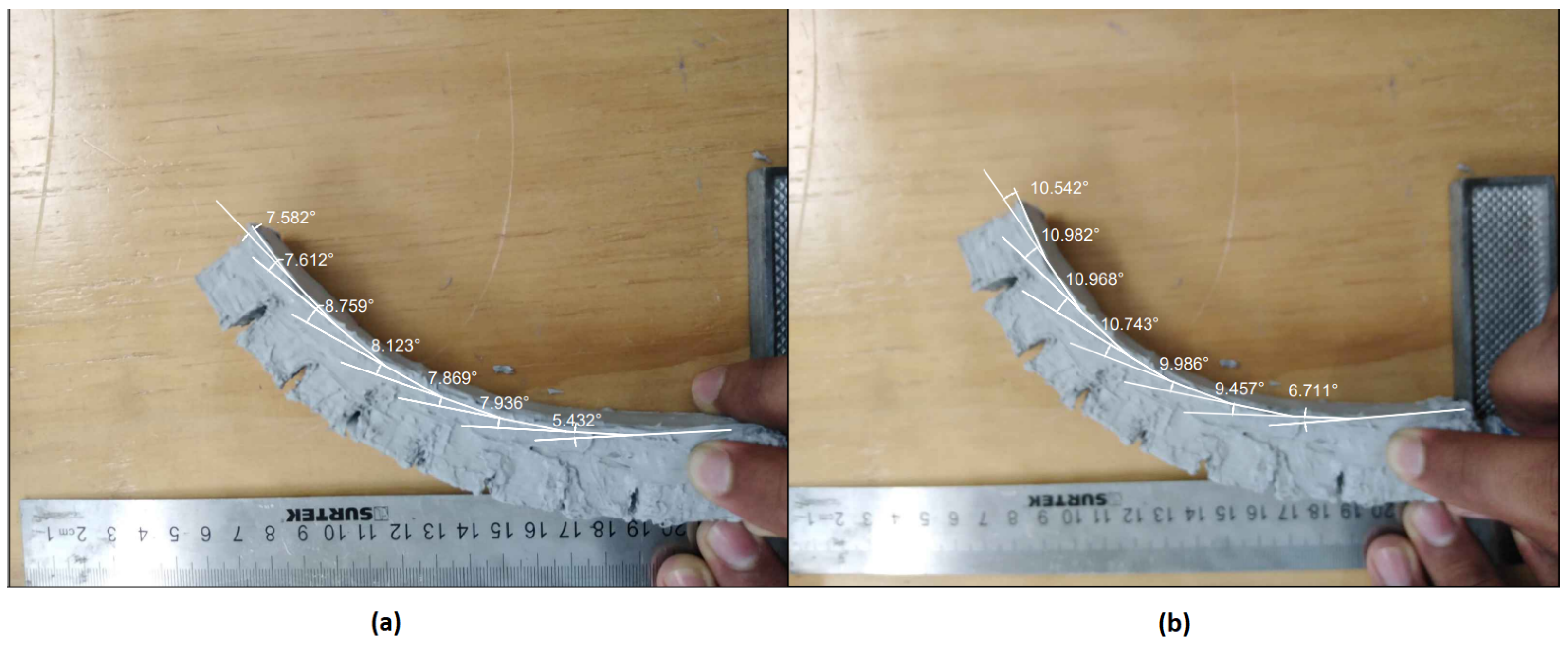
To validate results, various empirical samples were taken about the body of the actuator under different conditions. Body flexion of was controlled and measured using a pressure regulator with an integrated manometer. Photographs were obtained from a lateral view at pressures of 0.5, 1.0, 1.5, and 2.0 kg/cm
2.
Figure 13 presents the results at 1.5 and 2.0 kg/cm
2 and its angle measurements taken per chamber relative to the corresponding previous segment.
The major limitation encountered in this study was the supply of compressed air. This did not allow validation with angles greater than those shown in the results. As future work, the model should be tested with other materials that have greater deformation to validate larger angles.
Relying on the relationship between pressure and volumetric deformation, the exact time expressed by the model can be calculated by applying calculations at a specific pressure. Such methods were used to create comparisons with real calculations.
Figure 14 present graphic representation of the backbone curve of a soft actuator set at 1.5 and 2.0 kg/cm
2 using the geometrical parameters designed for the real test prototype.
The reference taken was the initial position of the first segment which was considered to be constant. The backbone curve was drawn by tracing the inflection points between segments.The slight difference in measurement is due to the composition of the material as well as human errors in prototype manufacturing. The first angle is notoriously smaller because the flexion at that particular point is dependent only on one active segment as the initial constant segment lacks a pneumatic chamber to contribute towards the flexion of the actuator.
A comparison between test photographs and the modeled backbone curve is presented in
Figure 15 with a superposition between images. The angle of the graphed model shifts to correlate with the reference line which is the initial segment.
The contents listed in
Table 1 provide the individual results for the angular displacement for each segment at the four pressure conditions mentioned. To compare test results with the calculated predictions, an average value was obtained from the angles
. This approach was permitted due to the fact that all chambers were designed with equivalent geometries. Angle
is omitted because its movement depends only on a single active chamber, this being a different instance from that of the rest of the segments.
The results are provided in degrees in
Table 2 to facilitate the understanding of the magnitudes presented.
Comparing the average with the theoretical results, the maximum error was that of 0.647° at a pressure of 1 kg/cm2. The model grants precision at elevated deformations. This is attributed to the fact that the ellipsoidal geometrical approximation is advised only for ellipses with radii that do not differ significantly in magnitude. This holds true, as tests with low deformation are less precise.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}