
Composite Sliding Mode Control of High Precision Electromechanical Actuator Considering Friction Nonlinearity
Abstract
:1. Introduction
2. Modeling and Analysis of EMA
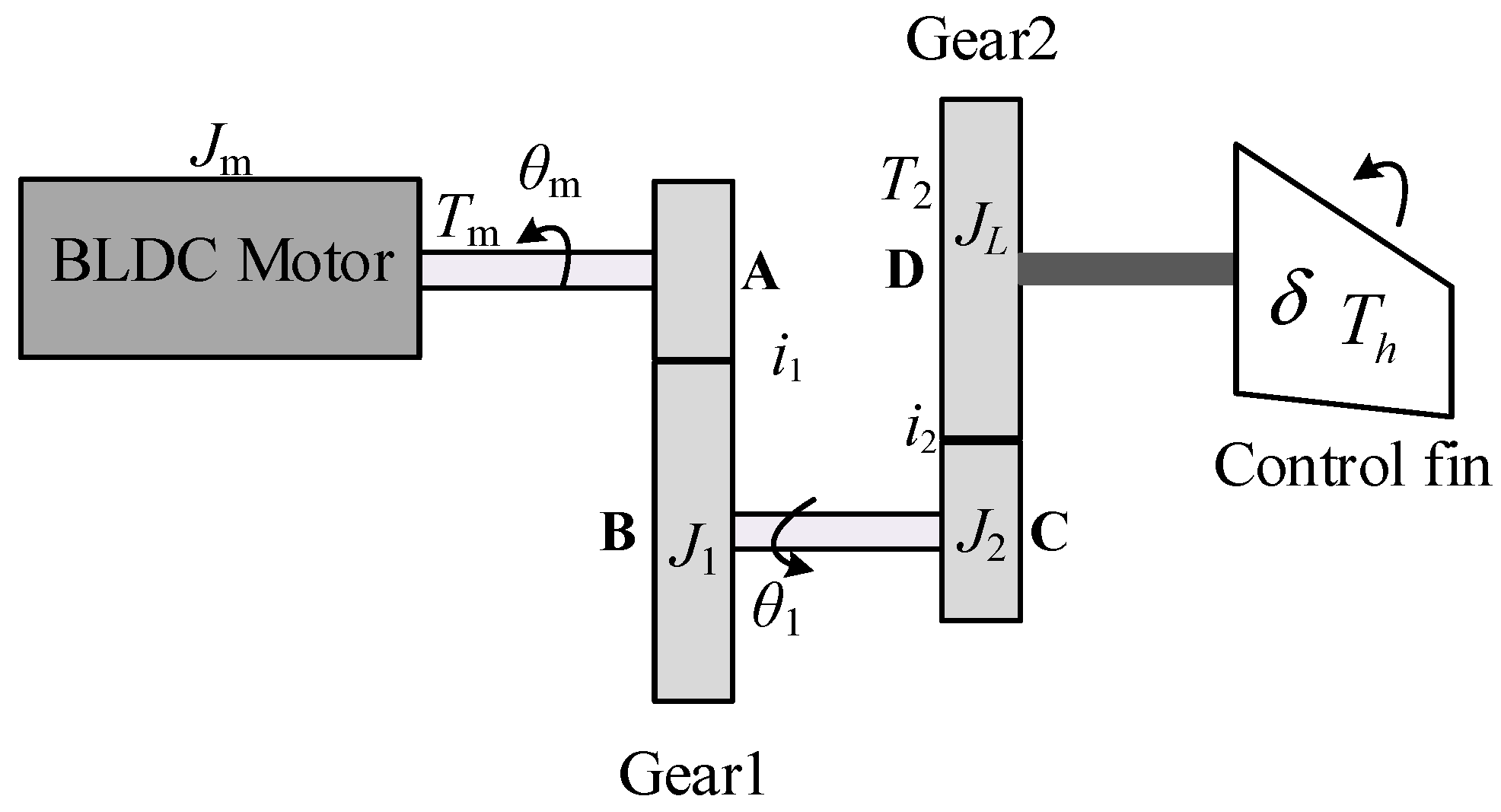
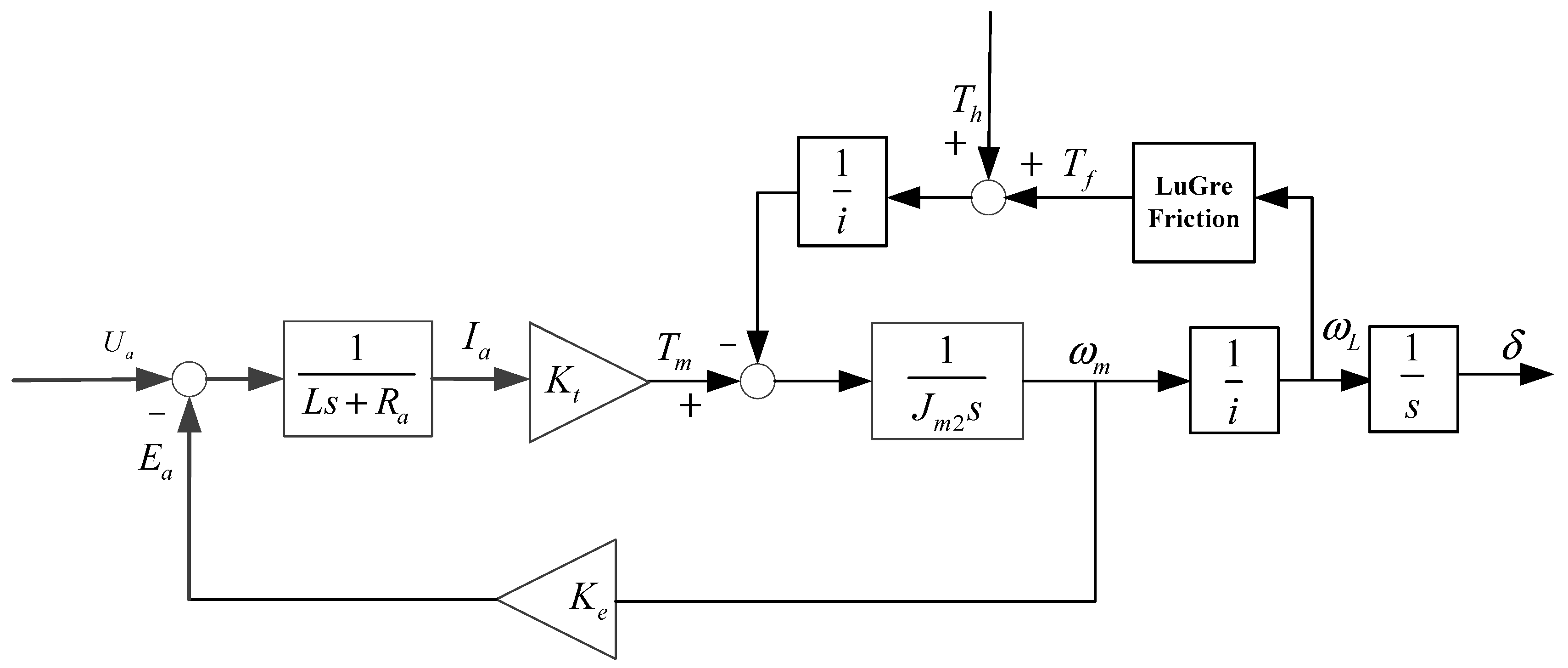
2.1. Modeling of EMA
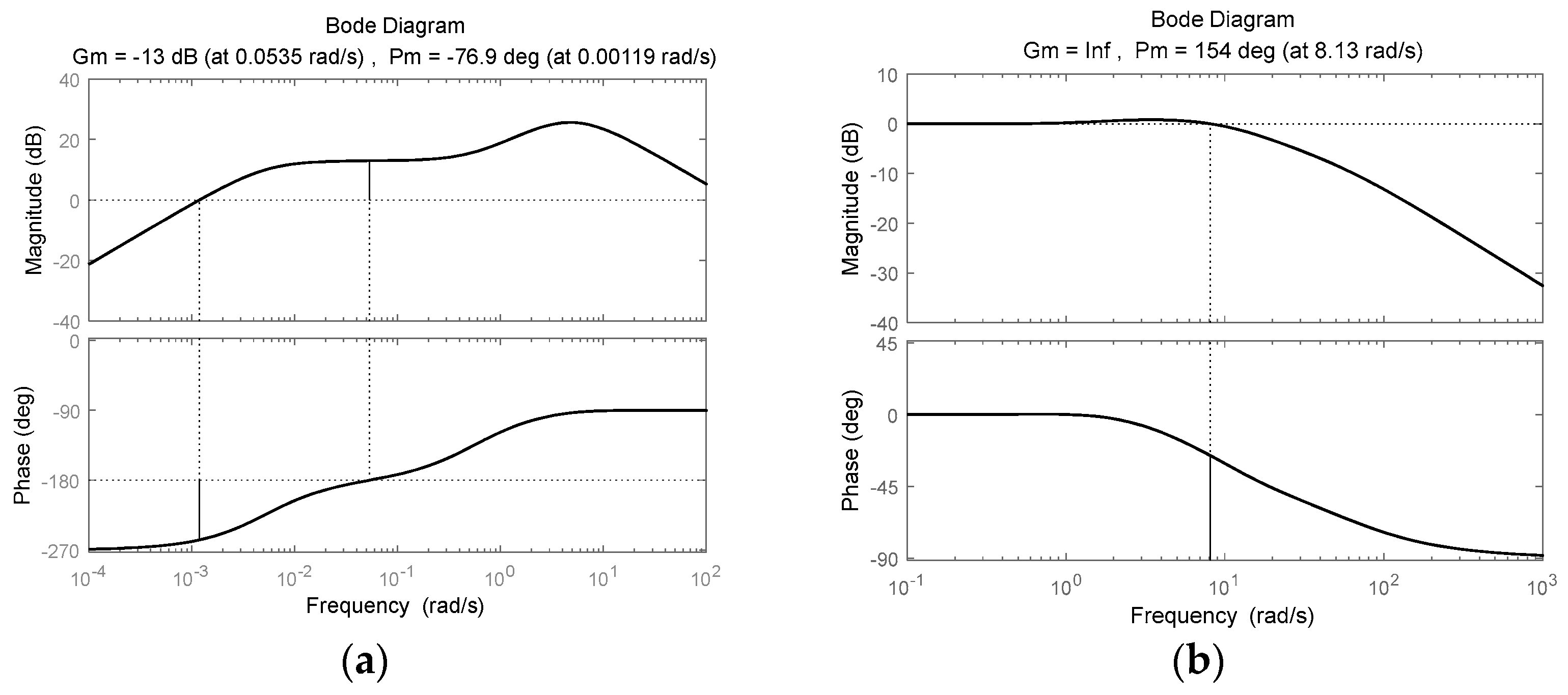
2.2. Influence of Friction Nonlinearity on Attitude Control of Flight Vehicle
2.2.1. Friction Nonlinearity Effects on EMA Dynamics under PID Control
2.2.2. Influence of EMA Friction Nonlinearity on Attitude of Flight Vehicle
- Flight vehicle model and controller design
- 2.
- Analysis of EMA friction nonlinearity influence on attitude control
3. Composite SMC Based on MESO
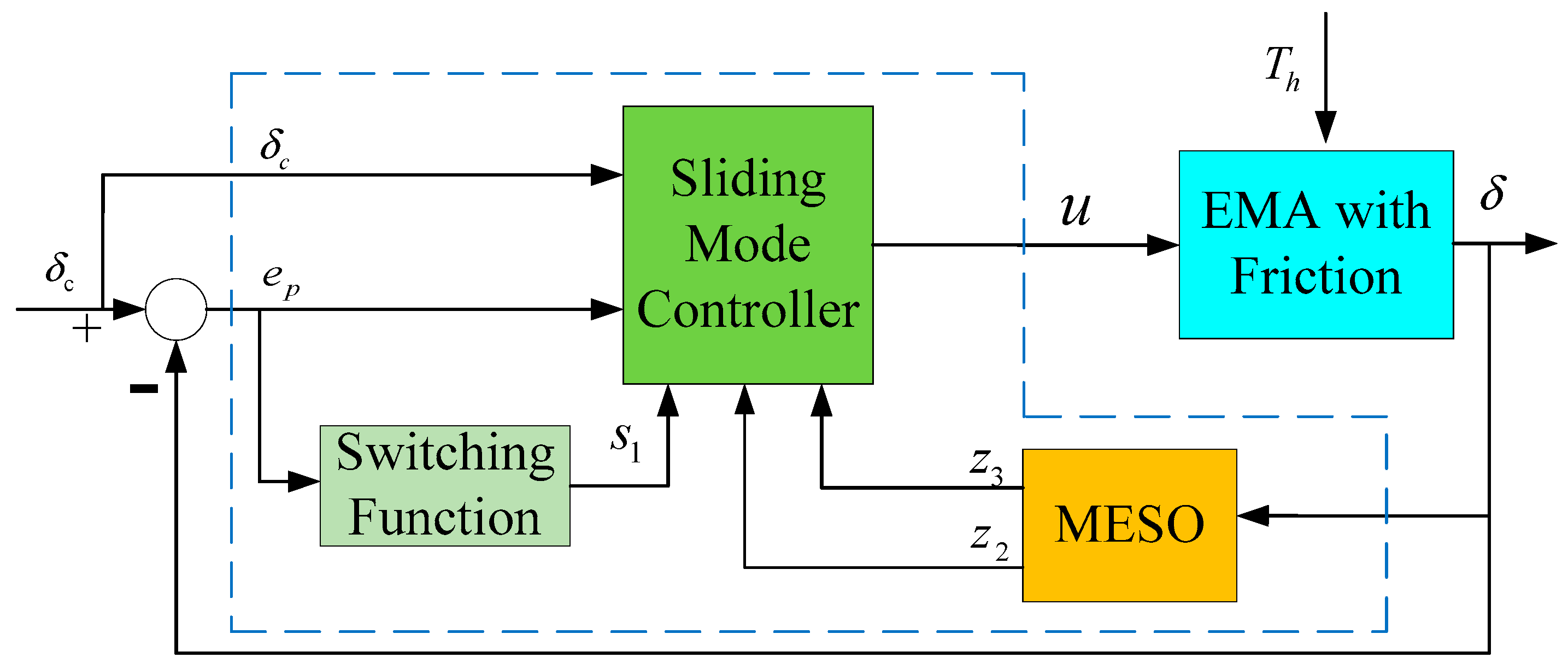
3.1. Design of Composite SMC Based on MESO
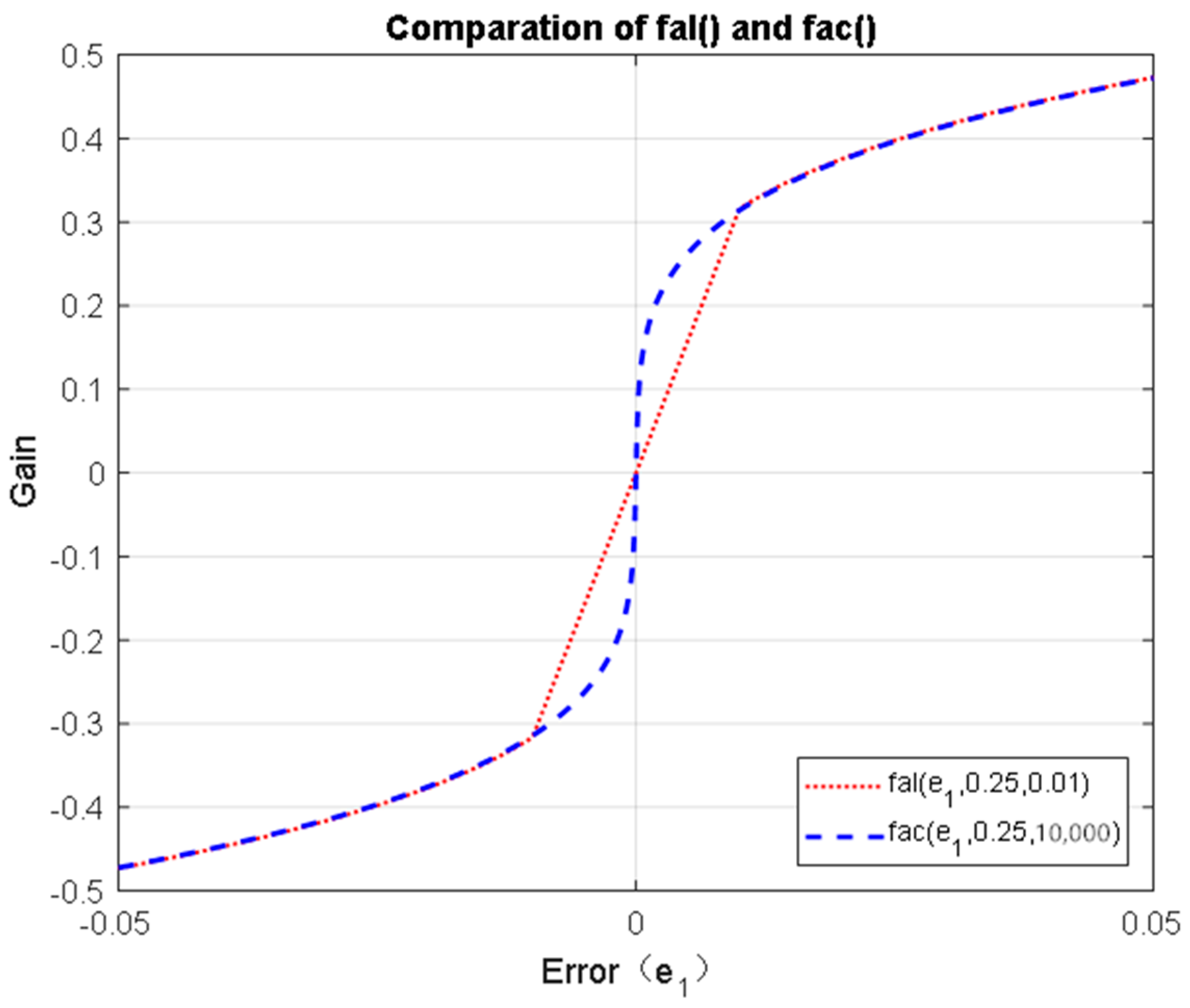
3.2. Design of MESO
3.3. Stability Proof of MESO
3.4. Composite SMC Design
4. Numerical Simulation
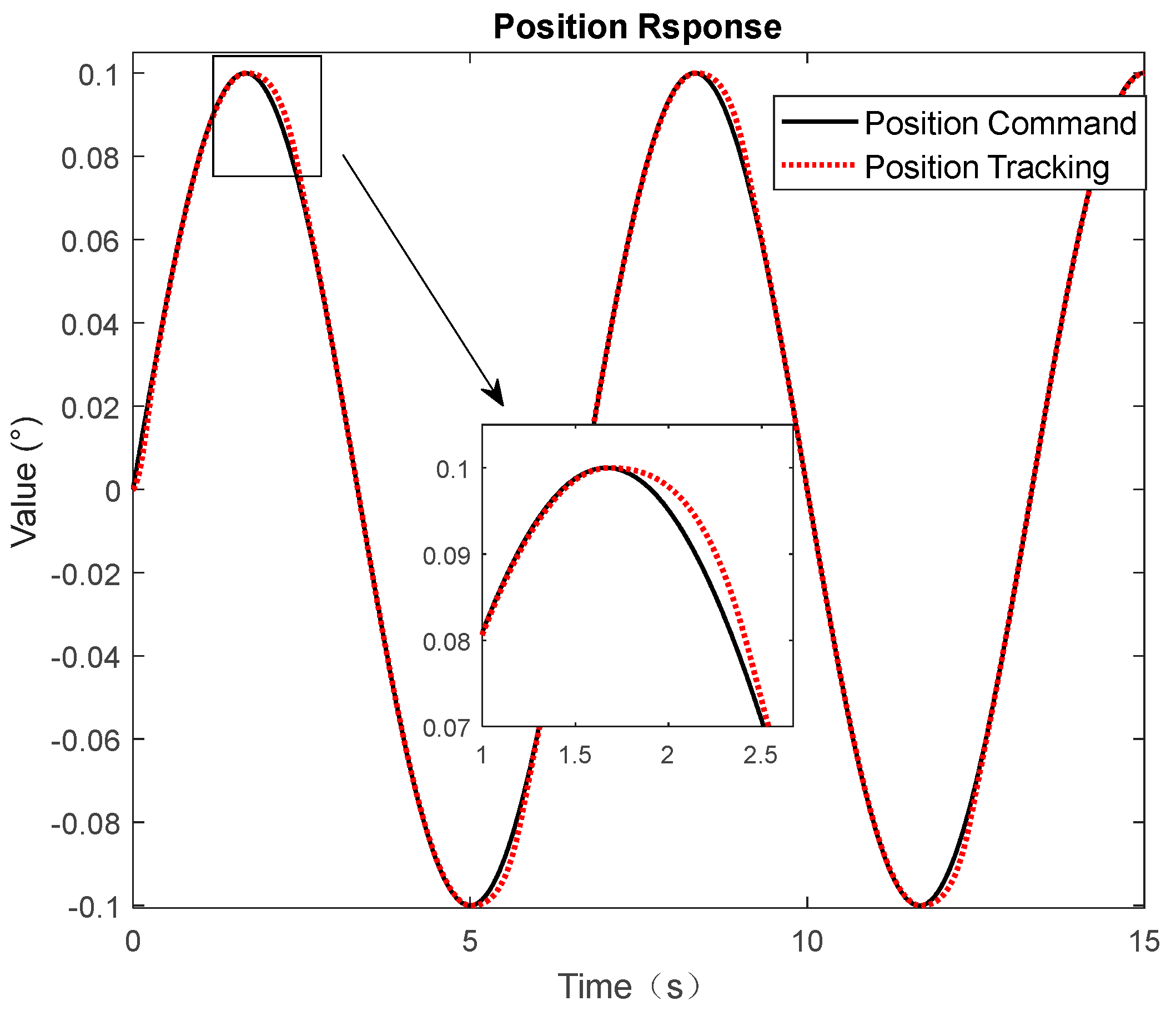
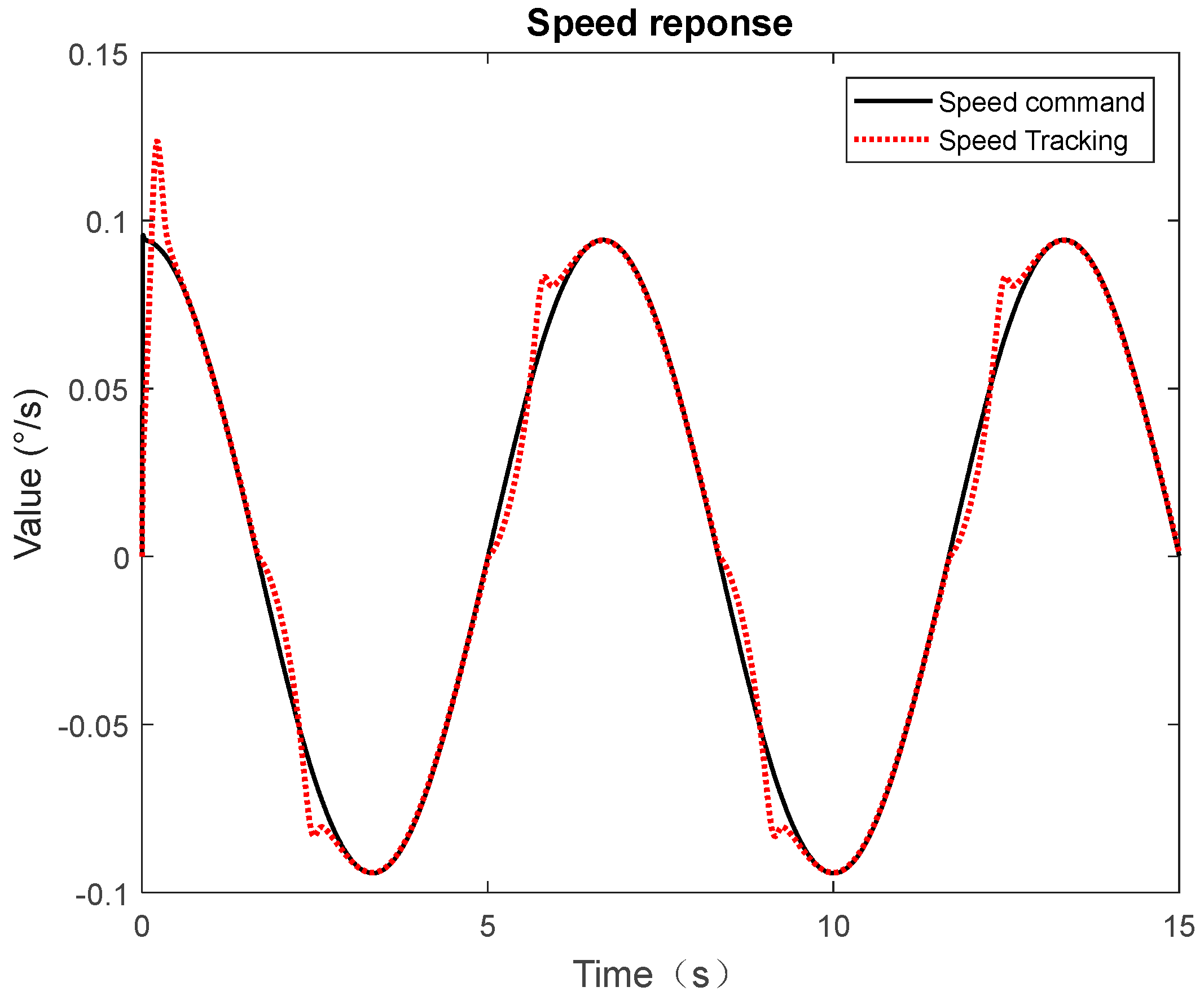
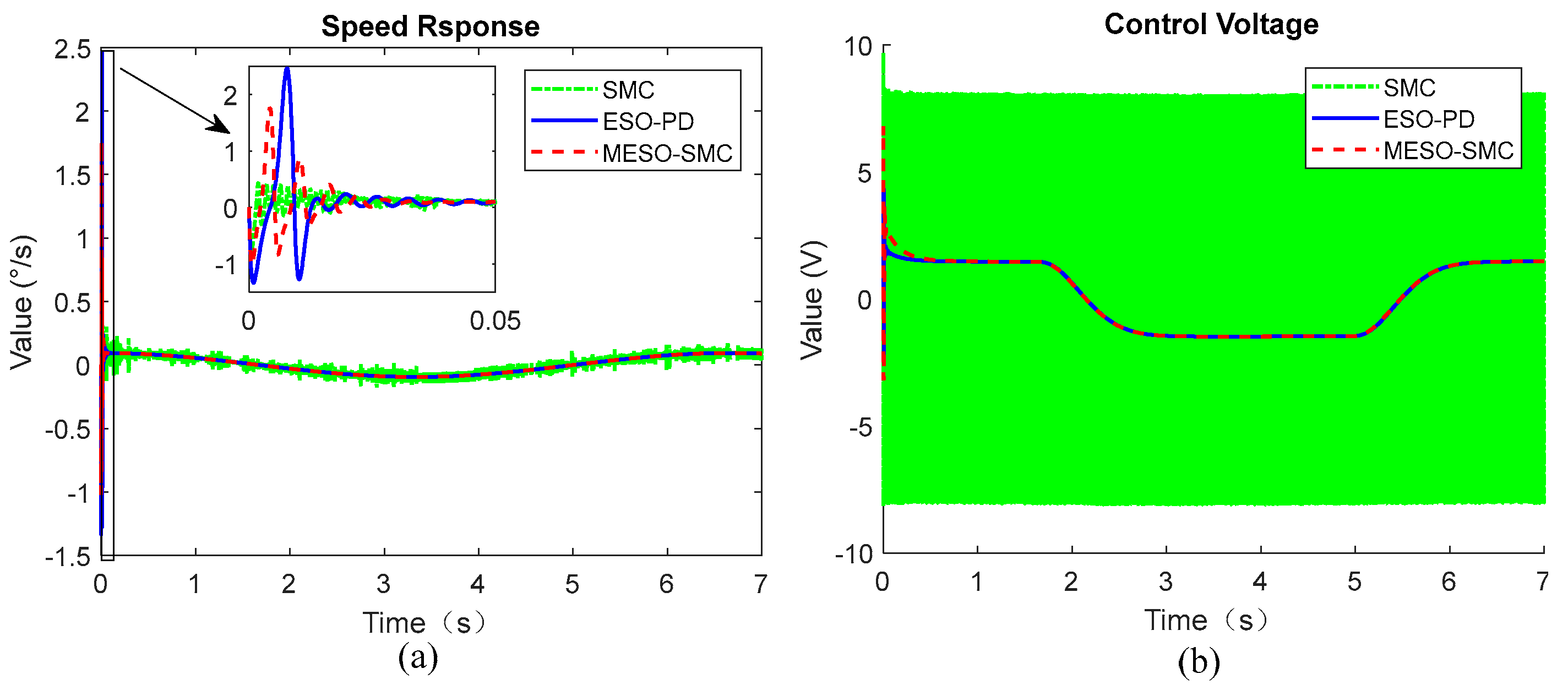
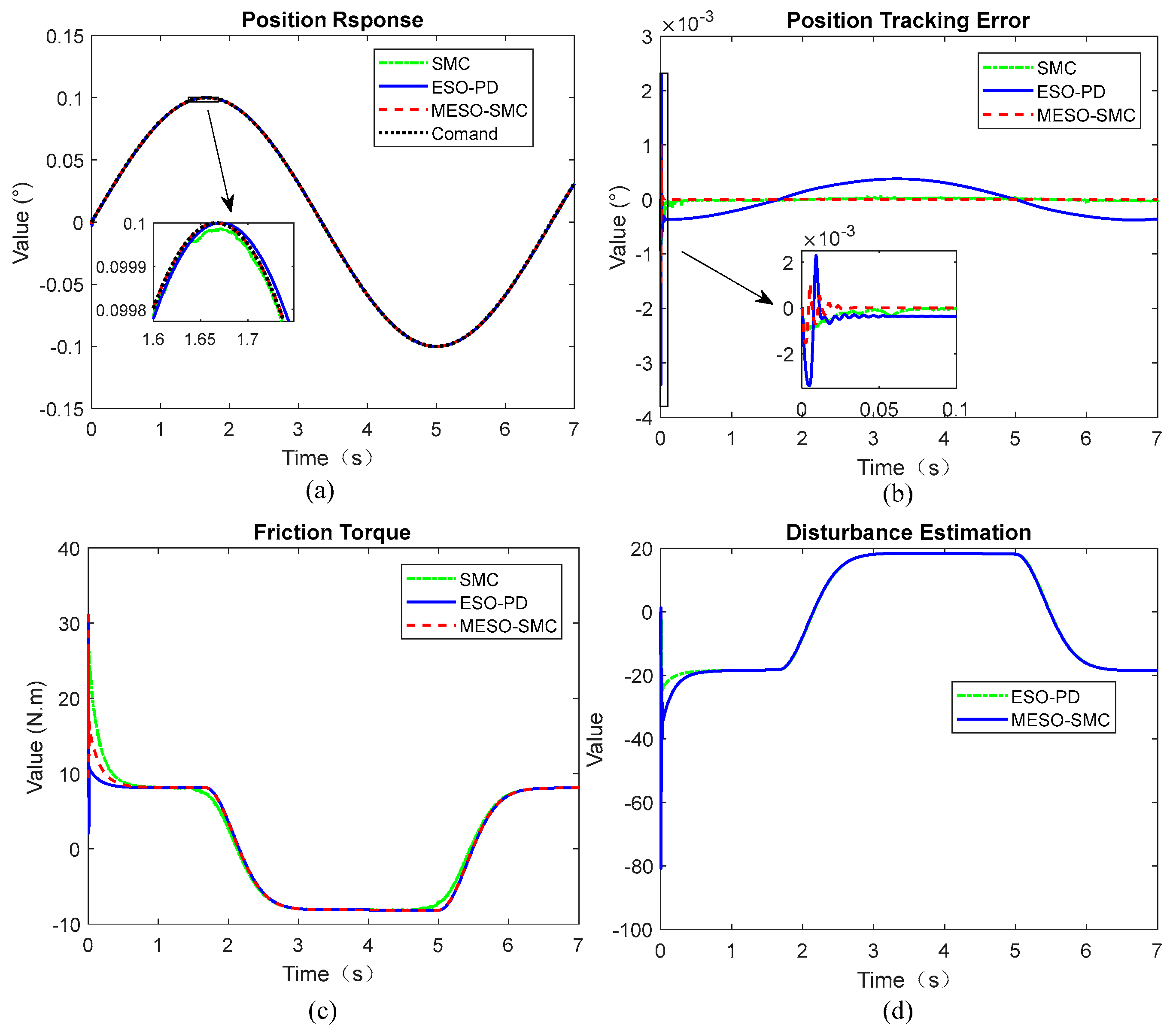
4.1. Low Frequency Tracking Performance
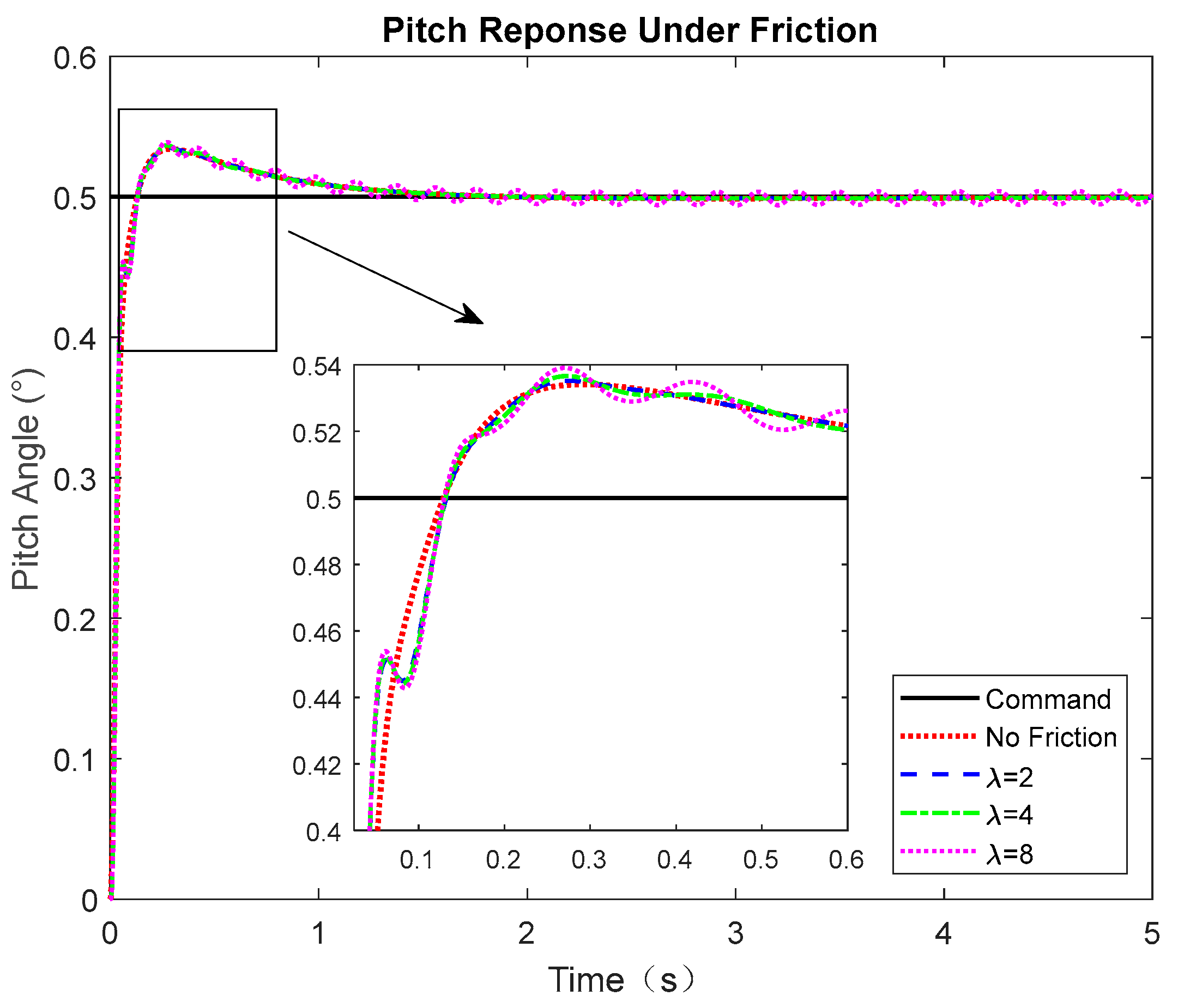
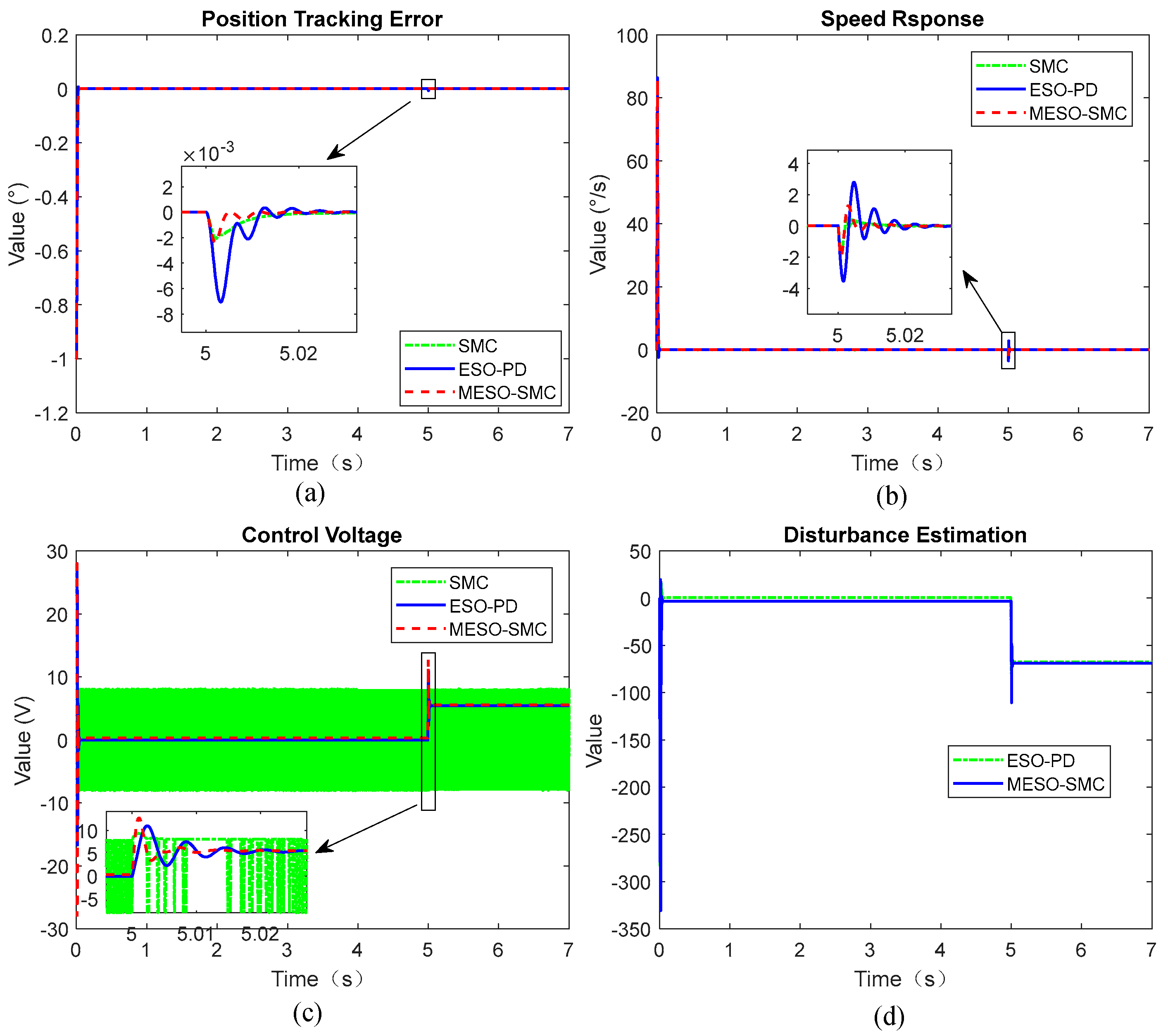
4.2. Step Response
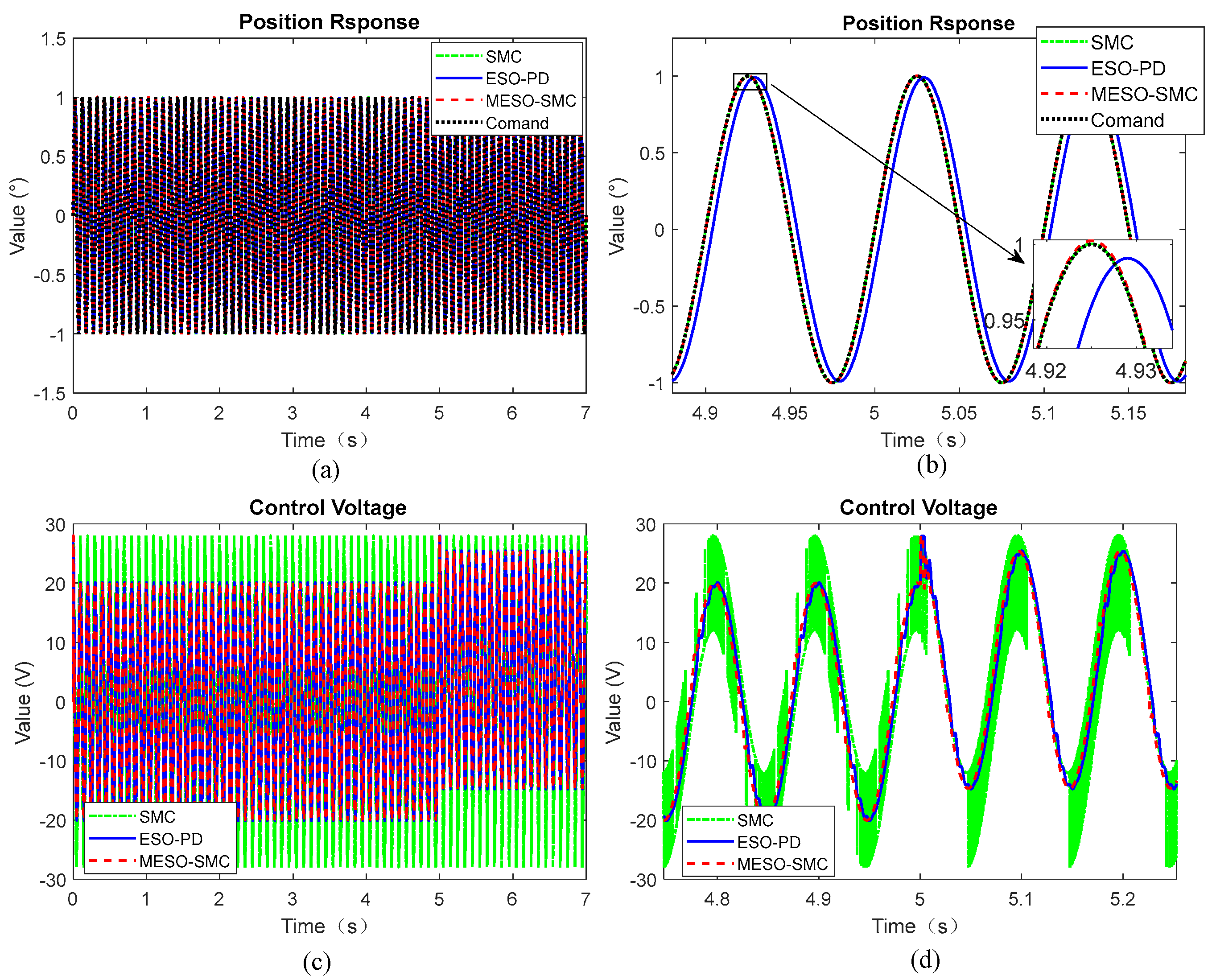
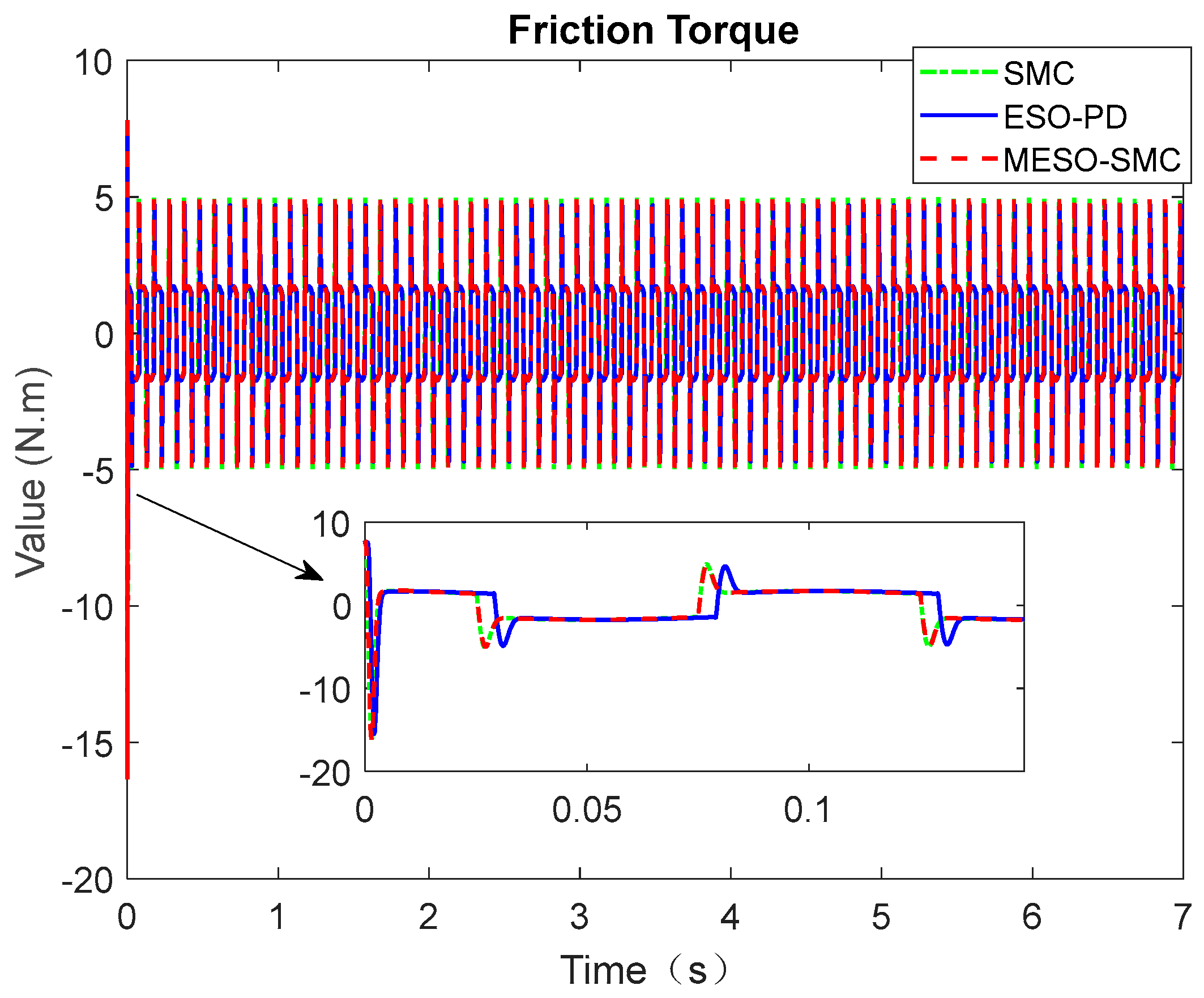
4.3. High-Frequency Dynamic Response
5. Conclusions
- (1)
- The MESO-SMC method in this paper has high position tracking accuracy, and the “flat top” and speed curve distortion phenomenon caused by friction are effectively compensated for.
- (2)
- In the case of high-frequency response, the position dynamics governed by the ESO-PD controller have a certain phase lag, and both MESO-SMC and SMC have good position tracking performance.
- (3)
- MESO-based controller has good estimation performance and can effectively estimate and compensate for internal and external disturbances.
- (4)
- Although SMC has good robustness, it will produce control chattering or even speed chattering. MESO-SMC can effectively suppress sliding mode chattering and achieve high-precision robust control.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wei, R.; Dong, Q.; Zhang, X.; Li, Z. Friction Compensation Control of Electromechanical Actuator Based on Neural Network Adaptive Sliding Mode. Sensors 2021, 21, 1508. [Google Scholar]
- Merzouki, R.; Cadiou, J.C. Estimation of backlash phenomenon in the electromechanical actuator. Control Eng. Pract. 2005, 13, 973–983. [Google Scholar] [CrossRef]
- Merzouki, R.; Davila, J.A.; Fridman, L.; Cadiou, J.C. Backlash phenomenon observation and identification in electromechanical system. Control Eng. Pract. 2007, 15, 447–457. [Google Scholar] [CrossRef]
- Sun, G.; Zhao, J.; Chen, Q. Observer-based compensation control of servo systems with backlash. Asian J. Control 2019, 23, 499–512. [Google Scholar] [CrossRef]
- Elmic, R.R.; Lewis, F.L. Deadzone compensation in motion control systems using neural networks. IEEE Trans. Autom. Control 2000, 45, 602–613. [Google Scholar] [CrossRef]
- Zuo, Z.; Li, X.; Shi, Z. L1 adaptive control of uncertain gear transmission servo systems with deadzone nonlinearity. ISA Trans. 2015, 58, 67–75. [Google Scholar] [CrossRef]
- Zuo, Z.; Ju, X.; Ding, Z. Control of Gear Transmission Servo Systems With Asymmetric Deadzone Nonlinearity. IEEE Trans. Control Syst. Technol. 2016, 24, 1472–1479. [Google Scholar] [CrossRef]
- Fu, B.; Qi, H.; Xu, J.; Yang, Y.; Wang, S.; Gao, Q. Attitude Control in Ascent Phase of Missile Considering Actuator Non-Linearity and Wind Disturbance. Appl. Sci. 2019, 9, 5113. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Ma, D. Robust adaptive precision motion control of hydraulic actuators with valve dead-zone compensation. Isa Trans. 2017, 70, 269–278. [Google Scholar] [CrossRef]
- Man, Z.; Mao, D.; Zhang, M.; Guo, L.; Gong, M. A Hybrid Control with PID–Improved Sliding Mode for Flat-Top of Missile Electromechanical Actuator Systems. Sensors 2018, 18, 4449. [Google Scholar] [CrossRef]
- Keck, A.; Zimmermann, J.; Sawodny, O. Friction parameter identification and compensation using the ElastoPlastic friction model. Mechatronics 2017, 47, 168–182. [Google Scholar] [CrossRef]
- Khayati, K.; Bigras, P.; Dessaint, L.A. LuGre model-based friction compensation and positioning control for a pneumatic actuator using multi-objective output-feedback control via LMI optimization. Mechatronics 2009, 19, 535–547. [Google Scholar] [CrossRef]
- Capace, A.; Merola, A.; Cosentino, C.; Amato, F. A Multistate Friction Model for the Compensation of the Asymmetric Hysteresis in the Mechanical Response of Pneumatic Artificial Muscles. Actuators 2019, 8, 49. [Google Scholar] [CrossRef]
- Lrinc, M.; Béla, L. Identification and Model-based Compensation of Striebeck Friction. Acta Polytech. Hung. 2006, 3, 45–58. [Google Scholar]
- Wang, S.; Wu, Q.; Yang, X. Active disturbance rejection control of friction for optoelectronic telescopes. Int. J. Simul. Syst. 2016, 17, 35.31–35.35. [Google Scholar] [CrossRef]
- Freidovich, L.; Robertsson, A.; Shiriaev, A.; Johansson, R. LuGre-Model-Based Friction Compensation. IEEE Trans. Control Technol. 2009, 18, 194–200. [Google Scholar] [CrossRef]
- Yu, H.; Gao, H.; Deng, H.; Yuan, S.; Zhang, L. Synchronization Control with Adaptive Friction Compensation of Treadmill-based Testing Apparatus for Wheeled Planetary Rover. IEEE Trans. Ind. Electron. 2021, 69, 592–603. [Google Scholar] [CrossRef]
- Utkin, V.I.; Chang, H.C. Sliding mode control on electro-mechanical systems. Math. Probl. Eng. 2002, 8, 1–23. [Google Scholar] [CrossRef]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-Mode Robot Control With Exponential Reaching Law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]
- Shepit, B.M.; Pieper, J.K. Sliding mode control design for complex valued sliding manifold. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No.01CH37228), Orlando, FL, USA, 4–7 December 2001. [Google Scholar]
- Difonzo, F.V. A note on attractivity for the intersection of two discontinuity manifolds. Opusc. Math. 2020, 40, 685–702. [Google Scholar] [CrossRef]
- Haddad, W.M.; Chellaboina, V. Nonlinear dynamical systems and control. In Nonlinear Dynamical Systems and Control; Princeton University Press: Princeton, NJ, USA, 2011. [Google Scholar]
- Liu, J.; Sun, F. Research progress of sliding mode variable structure control theory and algorithm. Control Theory Appl. 2007, 24, 407–418. [Google Scholar] [CrossRef]
- Wang, S.; Chen, Q.; Ren, X.; Yu, H. Neural network-based adaptive funnel sliding mode control for servo mechanisms with friction compensation. Neurocomputing 2020, 377, 16–26. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Extended-State-Observer-Based Adaptive Control of Electro-Hydraulic Servomechanisms without Velocity Measurement. IEEE ASME Trans. Mechatron. 2019, 25, 1151–1161. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Yaoyao, W.; Xiaowei, Y.; Jiuhui, C. Output feedback backstepping control of hydraulic actuators with valve dynamics compensation. Mech. Syst. Signal Processing 2021, 158, 107769. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Ma, D. Time-varying input delay compensation for nonlinear systems with additive disturbance: An output feedback approach. Int. J. Robust Nonlinear Control 2018, 28, 31–52. [Google Scholar] [CrossRef]
- Ren, C.; Li, X.; Yang, X.; Ma, S. Extended State Observer based Sliding Mode Control of an Omnidirectional Mobile Robot with Friction Compensation. IEEE Trans. Ind. Electron. 2019, 66, 9480–9489. [Google Scholar] [CrossRef]
- Shin, W.H.; Lee, S.J.; Lee, I.; Bae, J.S. Effects of actuator nonlinearity on aeroelastic characteristics of a control fin. J. Fluids Struct. 2007, 23, 1093–1105. [Google Scholar] [CrossRef]
- Canudas, d.W.C.; Olsson, H.; Astrom, K.J.; Lischinsky, P. A new model for control of systems with friction. IEEE Trans. Autom. Control 1995, 40, 419–425. [Google Scholar] [CrossRef]
- De Wit, C.C.; Lischinsky, P. Adaptive friction compensation with partially known dynamic friction model. Int. Comm. Radiat. Units Meas. 1997, 11, 65–80. [Google Scholar] [CrossRef]
- Wei, Y.U.; Jia-Guang, M.A.; Jin-Ying, L.I.; Xiao, J. Friction parameter identification and friction compensation for precision servo turning table. Opt. Precis. Eng. 2011, 19, 2736–2743. [Google Scholar] [CrossRef]
- Awouda, A.; Mamat, R.B. New PID Tuning Rule Using ITAE Criteria. In Proceedings of the 2010 the 2nd International Conference on Computer and Automation Engineering (ICCAE), Singapore, 26–28 February 2010; pp. 171–176. [Google Scholar]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 2002, 40, 23–36. [Google Scholar] [CrossRef]
- Gao, W.; Wang, Y.; Homaifa. Discrete-time variable structure control systems. IEEE Trans. Ind. Electron. 1995, 42, 117–122. [Google Scholar]
- Olsson, H.; Strm, K.J.; Wit, C.; Gfvert, M.; Lischinsky, P. Friction Models and Friction Compensation. Eur. J. Control 1998, 4, 5517–5522. [Google Scholar] [CrossRef] [Green Version]
- Han, J. The Technique for Estimating and Compensating the Uncertainties: Active Disturbance Rejection Control Technique, 4th ed.; National Defense Industry Press: Beijing, China, 2008. [Google Scholar]
- Guo, B.Z.; Zhao, Z.L. On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control Lett. 2011, 60, 420–430. [Google Scholar] [CrossRef]
- Petros, A.; Ioannou, J.S. Robust Adaptive Control; Prentice Hall: Hoboken, NJ, USA, 1995. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| 315 | ) | ||
| ) | |||
| ) | |||
| ) | ) | ||
| ) | ) | ||
| ) | |||
| ) | ) |
| Controller | Parameters | Value | Parameters | Value |
|---|---|---|---|---|
| MESO-SMC | 230 | |||
| 3570 | ||||
| 12.5 | ||||
| 0.5 | ||||
| SMC | 230 | −50 | ||
| 500 | 50 | |||
| 0.5 | 12.5 | |||
| −220.5 | ||||
| ESO-PD | 500 | 12.5 | ||
| 1500 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, B.; Qi, H.; Xu, J.; Yang, Y. Composite Sliding Mode Control of High Precision Electromechanical Actuator Considering Friction Nonlinearity. Actuators 2022, 11, 265. https://doi.org/10.3390/act11090265
Fu B, Qi H, Xu J, Yang Y. Composite Sliding Mode Control of High Precision Electromechanical Actuator Considering Friction Nonlinearity. Actuators. 2022; 11(9):265. https://doi.org/10.3390/act11090265
Chicago/Turabian StyleFu, Bangsheng, Hui Qi, Jiangtao Xu, and Ya Yang. 2022. "Composite Sliding Mode Control of High Precision Electromechanical Actuator Considering Friction Nonlinearity" Actuators 11, no. 9: 265. https://doi.org/10.3390/act11090265